АЛМАТИНСКИЙ
ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра инженерной
графики и прикладной
механики
ПРИКЛАДНАЯ МЕХАНИКА
Программа, методические
указания и контрольные
задания
(для студентов специальности 050717
– Теплоэнергетика,
обучающихся по программе бакалавриата,
заочной формы обучения)
Алматы 2005
СОСТАВИТЕЛЬ:
А.Д. Динасылов. Прикладная механика. Программа, методические указания и контрольные задания (для студентов специальности 050717 – Теплоэнергетика, обучающихся по
программе бакалавриата, заочной формы обучения).
- Алматы: АИЭС,
2005. – 31 с.
Дисциплина
«Прикладная механика» для студентов специальности 050717
– Теплоэнергетика, обучающихся по программе бакалавриата, является
дисциплиной по выбору и относится к циклу базовых дисциплин. В данной
методической разработке, предназначенной для студентов заочной формы обучения,
приводятся программа курса, задания к
контрольным работам и методические указания, примеры выполнения контрольных
работ. Приводится список рекомендуемой литературы, и по каждой теме даются
ссылки на основной литературный источник с указанием номеров страниц.
Ил. 12, табл. 11,
библиогр. – 13 назв.
Рецензент: канд. техн. наук, доцент М.Ш. Мукашев.
Печатается по плану
издания Алматинского института теплоэнергетики и связи на 2005 г.
© Алматинский институт теплоэнергетики и связи, 2005 г.
Содержание
|
|
|
|
|
Введение |
4 |
|
|
1 |
Цели
и задачи дисциплины |
5 |
|
2 |
Изучаемые
темы и их содержание |
|
|
3 |
Темы
практических занятий |
|
|
4 |
Темы
лабораторных занятий |
|
|
5 |
Контрольные
работы |
|
|
|
5.1
Порядок выполнения контрольных работ |
|
|
|
5.2
Задачи, входящие в контрольные работы и указания к их выполнению |
|
|
|
5.2.1 Задача 1 - Кинематический анализ механизма |
|
|
|
5.2.2 Задача 2 - Кинетостатический анализ механизма |
|
|
|
5.2.3 Рекомендации по порядку работы над
выполнением задач |
|
|
|
5.2.4 Схемы механизмов и исходные данные |
|
|
|
5.3 Пример выполнения контрольных работ |
|
|
|
5.3.1 Выполнение задачи 1 -
Кинематический анализ механизма |
|
|
|
5.3.1.1 Вычерчивание расчетного
положения механизма |
|
|
|
5.3.1.2 План скоростей |
|
|
|
5.3.1.3 План ускорений |
|
|
|
5.3.2 Выполнение задачи 2 - Кинетостатический анализ механизма |
|
|
|
5.3.2.1
Определение инерционных
параметров звеньев и действующих на звенья нагрузок |
|
|
|
5.3.2.2
Определение реакций в
кинематических парах звеньев 2-3 |
|
|
|
5.3.2.3
Силовой анализ
кривошипа |
|
|
6 |
Учебно-методические материалы |
|
|
|
6.1 Основная литература |
|
|
|
6.2 Дополнительная литература |
|
Введение
Учебным планом подготовки бакалавров по специальности 050717 – Теплоэнергетика предусмотрено изучение по выбору дисциплины «Механика» либо «Прикладная механика», которые относятся к блоку базовых дисциплин. Настоящие методические указания предназначены для студентов-заочников, изучающих дисциплину «Прикладная механика»; разработка содержит программу курса, задания к контрольным работам и методические указания для их выполнения с примерами. Приводится список рекомендуемой литературы, по каждой теме даны ссылки на основной источник с указанием номеров страниц.
Ниже в приведены сведения об объеме обеих дисциплин, а также о выполняемых студентами контрольных работах:
- 4 кредита:
- всего 128 часов;
- 28 часов (или 20 часов) лекции;
- 0 часов (или 8 часов) лабораторные занятия;
- 16 часов практические занятия;
- 2 контрольные работы;
- экзамен.
1 Цели и задачи дисциплины
«Прикладная механика» представляет собой учебную дисциплину, лежащую в основе общетехнической подготовки бакалавров по специальности «Теплоэнергетика».
Являясь комплексной дисциплиной, «Прикладная механика» включает в себя логически связанные между собой положения и разделы курсов «Теоретическая механика», «Теория механизмов и машин», «Сопротивление материалов», «Детали машин».
Предмет дисциплины составляют теоретические основы надежной эксплуатации и проектирования типовых для теплоэнергетики машин, механизмов, приборов и их элементов.
В курсе используются сведения, полученные студентами при изучении дисциплин «Математика», «Физика», «Инженерная и компьютерная графика», «Материаловедение», «Основы информатики».
Цель изучения данной дисциплины студентами состоит в том, чтобы получить знания, необходимые для успешного освоения специальных дисциплин и для последующей деятельности в качестве инженеров-эксплуатационников или технологов в условиях производства, а также в качестве конструкторов - разработчиков новой техники.
Основные задачи курса - изучение основ общей механики, принципов функционирования типовых механизмов, машин и приборов, а также основ механики материалов и конструкций, их расчета и конструирования.
В результате изучения курса студент должен: иметь представление о принципах работы типовых механизмов, знать и уметь использовать методы кинематического и силового расчета типовых механизмов, иметь понятия о расчетах на прочность и жесткость элементов конструкций, деталей машин и приборов; иметь опыт постановки и решения задач в области прикладной механики.
2 Изучаемые темы и их содержание
Ниже приводятся темы, которые должен изучить студент. Если материал какой-либо темы излагается на лекциях, то после наименования раздела в скобках после литеры «Л» указывается число часов лекционных занятий по теме (при 20 часах лекций). В случае 28 часов лекционных занятий число дополнительных часов, отводимых данной теме на лекциях, приведено после литеры со звездочкой (Л*).
После блока вопросов по теме в квадратных скобках приводятся ссылки на литературу, указанную в разделе 6 настоящих указаний. Изучив материал очередной темы, целесообразно ответить на вопросы для самопроверки, приводимые в учебниках, и затем решить ряд задач, в том числе и входящих в контрольные работы.
2.1 Введение в дисциплину
Предмет, структура и задачи курса. Прикладная механика и машиностроение. Определяющая роль машиностроения в научно-техническом прогрессе и тенденции его развития. Связь курса с общеинженерными и специальными дисциплинами [6.1.1, c.4-6], [6.1.2, c.5-8].
2.2 Статика (Л – 4 часа)
Основные понятия и аксиомы статики [6.1.2, c.9-30].
Момент силы относительно точки и относительно оси [6.1.2, c.31-33, 72-77].
Пара сил [6.1.2, c.33-37].
Приведение произвольной системы сил к простейшей системе. Теорема Вариньона о моменте равнодействующей [6.1.2, c.37-41, 72-79].
Условия равновесия. Трение. Центр тяжести [6.1.2, c.79-94, 46-72].
2.3 Кинематика точки и простых движений твердого тела (Л – 4 часа)
Кинематика точки. Способы задания движения, скорость и ускорение точки [6.1.2, c.95-117].
Простейшие движения твердого тела: поступательное движение и вращение вокруг неподвижной оси [6.1.2, c.117-128].
Сложное движение точки: теорема о сложении ускорений; ускорение Кориолиса [6.1.2, c.155-169].
Плоскопараллельное движение твердого тела [6.1.2, c.127-147].
2.4 Основы динамики точки (Л – 2 часа)
Основные понятия и законы динамики. Дифференциальные уравнения движения материальной точки и их интегрирование [6.1.2, c.180-201].
Количество движения и импульс силы. Теоремы об изменении количества движения и об изменении момента количества движения материальной точки. Работа силы, мощность. Теорема об изменении кинетической энергии точки [6.1.2, c.201-218].
2.5 Основы динамики твердого тела и системы (Л – 4 часа)
Масса системы. Центр масс. Момент инерции тела относительно оси. Теорема Гюйгенса-Штейнера [6.1.2, c.263-269].
Теорема о движении центра масс системы. Теоремы об изменении количества движения и об изменении момента количества движения системы. Теорема об изменении количества движения системы. Динамика вращательного движения твердого тела вокруг неподвижной оси [6.1.2, c.273-326].
Принцип Д’Аламбера. Принцип возможных перемещений [6.1.2, c.344-367].
2.6 Основы теории механизмов (Л – 6 часов)
Основные понятия теории механизмов и машин. Кинематические пары и цепи, механизмы. Классификация механизмов. Структурный и кинематический анализ рычажных механизмов [6.1.1, c.7-17, 202-212].
Силы, действующие в рычажном механизме. Трение в кинематических парах. Определение реакций в кинематических парах рычажного механизма. Роботы и манипуляторы. Кулачковые механизмы [6.1.1, c.212-219].
Движение механизма под действием заданных сил. Неравномерность хода машины. Уравновешивание механизмов. Уравновешивание сил инерции, динамических нагрузок на фундамент вращающихся звеньев; балансировка роторов [6.1.1, c.320-343].
2.7 Растяжение и сжатие стержней (Л* - 4 часа)
Реальный объект и расчетная схема. Метод сечений. Внутренние силовые факторы. Понятия о напряжениях и деформациях. Принцип независимости действия сил [6.1.3, c.4-22].
Напряжения при растяжении-сжатии. Закон Гука. Модуль Юнга. Коэффициент Пуассона. Потенциальная энергия деформации. Температурные деформации. Диаграммы растяжения и сжатия. Пластичность, хрупкость, твердость. Понятия о ползучести [6.1.3, c.22-47, 78-82].
Расчеты на прочность по методу допускаемых напряжений. Расчет статически неопределимых систем. Температурные и монтажные напряжения. Местные напряжения. Концентрация напряжений. Напряжения смятия и контактные напряжения [6.1.3, c.47-78].
2.8 Сдвиг и кручение
Чистый сдвиг. Закон Гука при сдвиге. Практические расчеты сварных, заклепочных и других видов соединений при сдвиге [6.1.3, c.83-92].
Кручение стержней круглого поперечного сечения. Напряжения в поперечных сечениях. Расчеты на прочность и жесткость [6.1.3, c.109-122].
2.9 Изгиб стержней (Л* - 4 часа)
Внутренние силовые факторы при изгибе. Дифференциальные зависимости Журавского [6.1.3, c.123-146].
Геометрические характеристики поперечных сечений стержня [6.1.3, c.93-109, 6.1.3, c.93-108].
Напряжения в поперечных сечениях стержня при чистом и при поперечном изгибе. Формула Журавского для касательных напряжений. Расчеты на прочность при изгибе [6.1.3, c.146-160].
Перемещения при изгибе. Дифференциальное уравнение изогнутой оси и его интегрирование. Расчеты на жесткость при изгибе [6.1.3, c.164-168].
Косой изгиб. Внецентренное растяжение и сжатие. Совместное действие изгиба и растяжения (сжатия) [6.1.3, c.239-250].
2.10 Основы теории напряженного и деформированного состояний. Расчеты на прочность при сложном напряженном состоянии
Напряженное состояние в точке. Главные площадки и главные напряжения. Виды напряженных состояний. Обобщенный закон Гука [6.1.3, c.53-63].
Критерии пластичности и разрушения при сложном напряженном состоянии. Эквивалентные напряжения. Теории прочности: теория наибольших касательных напряжений, теория энергии формоизменения, теория прочности Мора [6.1.3, c.221-235].
Расчет стержней при совместном действии изгиба и кручения [6.1.3, c.253-256].
2.11 Устойчивость. Динамическое действие нагрузок. Прочность при циклически изменяющихся нагрузках
Устойчивость равновесия сжатых стержней. Формулы Эйлера и Ясинского для критической силы. Расчет сжатых стержней на устойчивость по коэффициенту снижения основного допускаемого напряжения [6.1.3, c.264-280].
Учет сил инерции при расчете элементов конструкций, движущихся с ускорением. Продольный и поперечный удар [6.1.3, c.287-306].
Усталостная прочность. Предел выносливости. Факторы, влияющие на усталостную прочность. Запас усталостной прочности [6.1.3, c.306-322].
2.12 Проектирование передаточных механизмов
Требования, предъявляемые к передаточным механизмам. Критерии работоспособности механизмов и их деталей. Материалы. Точность изготовления деталей механизмов и приборов [6.1.4, c.113-115, 8-36].
Зубчатые механизмы с параллельными и пересекающимися осями. Основные понятия. Изготовление и конструкция зубчатых колес, виды повреждений, геометрический и прочностной расчет передач [6.1.1, c.143-183].
Передачи со скрещивающимися осями; червячные передачи [6.1.1, c.183-192].
Фрикционные механизмы. Передача винт-гайка [6.1.1, c.122-126, 198-201].
Механизмы с гибкими звеньями: ременные и цепные передачи [6.1.1, c.126-143, 192-198].
2.13 Конструкции и расчет деталей и узлов машин и механизмов
Неразъемные соединения: сварные, заклепочные, с натягом, паяные и клеевые. Разъемные соединения: резьбовые, клеммовые, шпоночные, шлицевые, профильные, клиновые и штифтовые [6.1.1, c.278-314].
Валы и оси. Муфты: постоянные, управляемые и самоуправляемые [6.1.1, c.232-249].
Подшипники скольжения и подшипники качения. Смазочные устройства и уплотнения [6.1.1, c.250-273].
3 Темы практических занятий
3.1 Равновесие систем сходящихся сил.
3.2 Равновесие плоских и пространственных систем сил.
3.3 Кинематика точки и простых движений твердого тела.
3.4 Основы динамики точки.
3.5 Структурный и кинематический анализ плоских рычажных механизмов.
3.6 Кинетостатический анализ плоских рычажных механизмов.
3.7 Построение эпюр нормальных сил и напряжений, расчеты на прочность при растяжении-сжатии.
3.8 Построение эпюр изгибающих моментов и поперечных сил. Расчеты на прочность при изгибе.
4 Темы лабораторных работ
Лабораторные работы могут быть не включены или включены в программу дисциплины. В первом случае объем лекций составляет 28 часов, во втором – 20- часов.
4.1 Изучение кинематики плоского рычажного механизма с использованием компьютерной программы, разработанной в среде Delphi.
4.2 Кинетостатический анализ плоского рычажного механизма с использованием компьютерной программы, разработанной в среде Delphi.
4.3 Расчет на прочность и жесткость балки постоянного сечения в системе автоматизированного проектирования AutoCAD Mechanical.
4.4 Расчет резьбового соединения в системе Mechanical Desktop.
5 Контрольные работы
5.1 Общие требования
Согласно учебным планам студенты выполняют
две контрольные работы по прикладной механике. В соответствии с данной
разработкой предполагается выполнение контрольных работ по разделу “Теория
механизмов” дисциплины «Прикладная механика». Тематика работ - кинематический и
кинетостатический анализ плоского рычажного механизма.
Каждая из двух контрольных работ содержит
одну комплексную задачу, причем в решении второй задачи используются результаты
решения первой задачи. Задание на первую работу приведено в десяти схемах и
десяти вариантах. Студент должен взять номер схемы (рисунка) по последней цифре
шифра зачетной книжки, а вариант с цифровыми данными из соответствующей таблицы
– по предпоследней цифре шифра. Так, студент, зачетная книжка которого имеет
шифр 96472, должен для каждой задачи выбрать схему II и цифровые данные,
соответствующие варианту 7. Если последняя цифра шифра нуль, то следует взять
десятую схему (Х), а если предпоследняя цифра нуль, то данные из таблицы
принимаются по варианту 10. Кроме того, для каждой схемы задается положение
механизма, для которого следует выполнить расчет; расчетное положение механизма
принимается по второй от конца цифре шифра зачетной книжки.
Выполненная работа состоит из текстовой и
графической частей.
Текстовая часть, выполняемая чертежным
шрифтом или четким почерком на листах белой бумаги формата А4, должна содержать
титульный лист, задание, выполненные расчеты, список использованной литературы.
Работа должна быть оформлена согласно принятым нормам (СТП 768-01-07-97); на
листах текст должен быть только с одной стороны.
Объем графической части работы - два листа
формата А3 (по одному на задачу). Каждое графическое построение или группа
однотипных построений должны иметь поясняющую надпись и масштаб (с
размерностью), который следует выбирать так, чтобы построения были достаточно
крупными, и листы не имели пустых мест.
Текстовая и графическая части должны быть
прошиты вместе. Как графическая, так и расчетная часть работы, а также текстовый материал могут быть выполнены с помощью
компьютерных средств.
Примечание - Задания на контрольные
работы с некоторыми изменениями и уточнениями взяты из методических указаний
[6.2.5].
5.2 Задачи, входящие в контрольные работы, и
указания к их выполнению
5.2.1 Задача 1 - Кинематический анализ механизма
Для заданных схемы механизма, варианта
числовых данных и расчетного положения требуется выполнить следующее:
а) построить план положений механизма (при
общем изображении стойки) согласно равноотстоящим пронумерованным положениям
входного звена 1, показанным на схеме механизма. Размеры звеньев согласно обозначению
их точек на схеме механизма и значение угловой скорости w1 входного звена 1 указаны в соответствующем
вертикальном столбце таблицы числовых данных;
б) для расчетного положения механизма
построить план скоростей. На плане показать векторы скоростей всех точек,
обозначенных на схеме механизма буквами, в том числе и точек S - центров масс звеньев, которые при
стержневой форме звена считать находящимися на серединах их полных длин;
в) построить план ускорений механизма для
расчетного положения механизма. Найти векторы ускорений всех точек, указанных в
пункте б.
5.2.2 Задача 2 - Кинетостатический анализ механизма
Для схемы механизма, рассмотренной в задаче
1, используя результаты полученные при решении задачи 1, требуется выполнить
следующее:
а) определить инерционные нагрузки механизма
в расчетном положении и нанести их на звенья, используя построенный в задаче 1
план ускорений. Массу m
звеньев-стержней следует находить по их полной длине l и массе q, приходящейся
на 1 м длины звена: m = ql, приняв q = 10 кг/м. Массу звеньев-ползунов определять
по найденной массе m1
ведущего звена 1: масса ползуна 3 в кривошипно-ползунном механизме m3 = 4m1, в
синусном механизме массы ползунов 2 и 3 принять соответственно m2 = 2m1 и m3 = 10m1.
Моменты инерции звеньев-стержней относительно оси, проходящей через центр масс S перпендикулярно плоскости движения,
определять приближенно, как
IS = 0,1m∙l2;
б) определить реакции в кинематических парах группы звеньев 2 и 3
от действия инерционных нагрузок и сил веса, не учитывая трения. Следует вычертить
группу звеньев 2 и 3 и нанести на звенья действующие нагрузки. Рядом поместить
план сил группы. Если какая-либо сила относительно мала и при достаточно
больших векторах других сил должна изображаться вектором меньше миллиметра, то
его на плане сил можно не показывать. Однако в общих буквенных выражениях и при
подстановках в них значений следует приводить все силы и их плечи; пренебрегать
действием силы можно только после того, как будет показана его незначительность
по сравнению с действием других сил;
в) определить уравновешивающий момент на
кривошипе 1 и уравновешивающую силу, условно считая ее приложенной в точке А перпендикулярно кривошипу ОА для данного расчетного положения.
Найти реакцию в опоре О, учитывая
действие уравновешивающей силы. Выяснить роль уравновешивающей силы в данном
положении механизма: является она движущей силой или сопротивлением
(уравновешивающей в истинном смысле). Следует изобразить отдельно ведущее звено
со стойкой, показав действующие на стойку нагрузки, и.рядом поместить план сил
для ведущего звена.
5.2.3 Рекомендации по порядку работы над
выполнением задач
Для успешного выполнения контрольных работ
рекомендуется:
а) изучить теоретический материал по
теме работы, используя учебную и методическую литературу, например, [6.1.1,
6.1.4, 6.2.2, 6.2.3], а также конспект лекций;
б) для выполнения первой контрольной
работы следует проработать материал §6 сборника задач [6.2.4]:
ознакомиться с методическими указаниями, содержащими подробно разобранные примеры
(с.37-39, 43-56); просмотреть задачи
91-126, ответы к которым приведены в графической форме;
в) для выполнения второй контрольной
работы следует проработать материал
методических указаний к §9 сборника [6.2.4] с примером (с.78-81) и изучить материал методических
указаний к §12 сборника [6.2.4] с примерами 1, 2 (с.103-109).
5.2.4 Схемы механизмов и исходные
данные
Рисунок
1 - Cхема 1. Кривошипно-ползунный механизм
Таблица 1
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
lOA, мм |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
240 |
20 |
22 |
|
le , мм |
30 |
40 |
30 |
25 |
28 |
0 |
80 |
90 |
14 |
16 |
|
lAB, мм |
180 |
240 |
300 |
340 |
365 |
400 |
550 |
900 |
68 |
75 |
|
lAE, мм |
80 |
120 |
80 |
180 |
90 |
200 |
250 |
40 |
26 |
35 |
|
w1, рад/c |
60 |
25 |
30 |
35 |
32 |
18 |
26 |
15 |
80 |
30 |
Рисунок
2 - Схема 2. Кривошипно-ползунный механизм
Таблица 2
|
Величина |
Предпоследняя
цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
lOA, мм |
65 |
75 |
100 |
120 |
130 |
150 |
170 |
230 |
22 |
24 |
|
le,
мм |
20 |
35 |
60 |
20 |
30 |
0 |
10-0 |
80 |
12 |
15 |
|
lAB, мм |
200 |
250 |
320 |
300 |
330 |
360 |
500 |
650 |
75 |
86 |
|
lBE, мм |
60 |
100 |
150 |
125 |
150 |
140 |
250 |
200 |
20 |
28 |
|
w1, рад/c |
28 |
34 |
14 |
25 |
20 |
18 |
12 |
15 |
100 |
30 |
Рисунок 3 - Схема 3. Шарнирный четырехзвенник
Таблица 3
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
lOA, мм |
55 |
75 |
90 |
115 |
130 |
150 |
170 |
200 |
22 |
24 |
|
lOC, мм |
120 |
200 |
240 |
250 |
300 |
400 |
450 |
400 |
45 |
40 |
|
lBC, мм |
150 |
160 |
200 |
300 |
350 |
300 |
350 |
500 |
55 |
60 |
|
lAB, мм |
180 |
240 |
280 |
350 |
400 |
500 |
540 |
600 |
60 |
64 |
|
lAE, мм |
70 |
80 |
75 |
150 |
200 |
210 |
190 |
240 |
28 |
25 |
|
w1, рад/c |
30 |
35 |
15 |
24 |
20 |
19 |
14 |
25 |
60 |
50 |
Рисунок
4 - Cхема 4. Шарнирный четырехзвенник
Таблица 4
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
lOA, мм |
60 |
58 |
80 |
75 |
100 |
105 |
120 |
125 |
14 |
140 |
|
lOC, мм |
120 |
140 |
160 |
200 |
200 |
240 |
245 |
250 |
30 |
300 |
|
lBC, мм |
150 |
160 |
200 |
200 |
250 |
230 |
300 |
320 |
34 |
320 |
|
lAB, мм |
150 |
180 |
200 |
200 |
250 |
300 |
300 |
360 |
34 |
400 |
|
lBE, мм |
150 |
100 |
180 |
150 |
200 |
140 |
180 |
200 |
25 |
200 |
|
w1, рад/c |
40 |
30 |
16 |
30 |
28 |
25 |
22 |
20 |
60 |
21 |
Рисунок 5 - Схема 5. Шарнирный четырехзвенник
Таблица 5
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
lOA, мм |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
200 |
22 |
240 |
|
lOC, мм |
140 |
180 |
280 |
240 |
320 |
380 |
440 |
420 |
46 |
400 |
|
lBC, мм |
160 |
200 |
180 |
300 |
300 |
320 |
300 |
500 |
50 |
600 |
|
lAB, мм |
200 |
260 |
300 |
360 |
400 |
480 |
500 |
600 |
60 |
700 |
|
lAE, мм |
100 |
120 |
150 |
200 |
200 |
240 |
200 |
250 |
35 |
250 |
|
w1, рад/c |
30 |
28 |
25 |
20 |
24 |
31 |
21 |
30 |
60 |
12 |
Рисунок 6 - Схема 6.
Синусный механизм
Таблица 6
|
Величина |
Предпоследняя цифра шифра
(вариант числовых данных) |
||||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
lOA, мм |
50 |
100 |
150 |
25 |
60 |
80 |
120 |
200 |
140 |
175 |
|
|
le, мм |
10 |
30 |
60 |
10 |
30 |
40 |
60 |
80 |
70 |
100 |
|
|
lAE,
мм |
20 |
40 |
30 |
10 |
25 |
30 |
50 |
100 |
56 |
80 |
|
|
a, рад |
|
0 |
|
|
|
|
|
|
0 |
|
|
|
w1, рад/c |
20 |
15 |
30 |
50 |
35 |
40 |
25 |
15 |
28 |
18 |
|
Рисунок 7 - Схема 7. Двухкривошипный шарнирный
четырехзвенник
Таблица 7
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
lOA, мм |
150 |
200 |
50 |
240 |
70 |
80 |
35 |
60 |
60 |
50 |
|
lOC, мм |
55 |
100 |
20 |
75 |
40 |
50 |
20 |
10 |
24 |
30 |
|
lBC, мм |
170 |
240 |
60 |
200 |
80 |
100 |
40 |
80 |
64 |
60 |
|
lAB, мм |
120 |
200 |
52 |
160 |
75 |
90 |
37 |
70 |
40 |
55 |
|
lBE, мм |
50 |
80 |
30 |
85 |
40 |
60 |
30 |
40 |
20 |
35 |
|
w1, рад/c |
15 |
12 |
40 |
10 |
15 |
30 |
50 |
40 |
35 |
45 |
Рисунок 8 - Схема 8.Кривошипно-ползунный механизм с
большим дезаксиалом
Таблица 8
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
lOA, мм |
40 |
100 |
200 |
150 |
80 |
60 |
120 |
70 |
110 |
30 |
|
le, мм |
60 |
120 |
220 |
210 |
90 |
120 |
150 |
80 |
130 |
40 |
|
lAB, мм |
160 |
320 |
650 |
550 |
250 |
280 |
400 |
220 |
360 |
110 |
|
lBE, мм |
50 |
80 |
200 |
150 |
60 |
100 |
120 |
60 |
110 |
40 |
|
w1, рад/c |
60 |
30 |
20 |
15 |
35 |
40 |
12 |
37 |
26 |
80 |
Рисунок 9 - Схема 9.
Двухкривошипный шарнирный четырехзвенник
Таблица 9
|
Величина |
Предпоследняя цифра шифра
(вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
lOA, мм |
60 |
80 |
64 |
40 |
100 |
80 |
200 |
60 |
240 |
170 |
|
lOC, мм |
25 |
10 |
20 |
20 |
50 |
40 |
75 |
20 |
100 |
60 |
|
lBC, мм |
50 |
60 |
60 |
35 |
80 |
70 |
240 |
50 |
200 |
150 |
|
lAB, мм |
55 |
70 |
40 |
36 |
90 |
75 |
160 |
52 |
200 |
130 |
|
lAE,
мм |
30 |
35 |
25 |
26 |
40 |
40 |
70 |
25 |
120 |
60 |
|
w1, рад/c |
35 |
28 |
30 |
45 |
25 |
30 |
15 |
32 |
12 |
16 |
Рисунок
10 - Схема 10. Шарнирный четырехзвенник c большим коромыслом
Таблица 10
|
Величина |
Предпоследняя цифра шифра
(вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
lOA, мм |
40 |
20 |
100 |
60 |
50 |
80 |
25 |
100 |
120 |
90 |
|
lOC, мм |
80 |
30 |
180 |
100 |
150 |
200 |
100 |
400 |
300 |
315 |
|
lBC, мм |
160 |
60 |
350 |
200 |
250 |
400 |
150 |
550 |
420 |
315 |
|
lAB, мм |
140 |
60 |
320 |
190 |
200 |
300 |
90 |
300 |
350 |
250 |
|
lBE,
мм |
40 |
15 |
50 |
40 |
100 |
100 |
40 |
75 |
100 |
65 |
|
w1, рад/c |
30 |
35 |
12 |
15 |
20 |
16 |
40 |
20 |
15 |
22 |
5.3 Пример выполнения контрольных работ
При оформлении контрольных работ студент
обязан выписать шифр своей зачетной книжки, указать номер схемы, номер варианта
для числовых данных и номер расчетного положения. Далее перед решением первой
задачи следует выписать пункты задания (подраздел 5.2.1), вычертить схему
механизма и выписать исходные данные. Перед решением второй задачи нужно
выписать пункты задания на вторую задачу (подраздел 5.2.2), сделать ссылку на
первую задачу и привести решение.
В рассматриваемом примере ввиду
ограниченности объема настоящих методических указаний мы не будем повторять
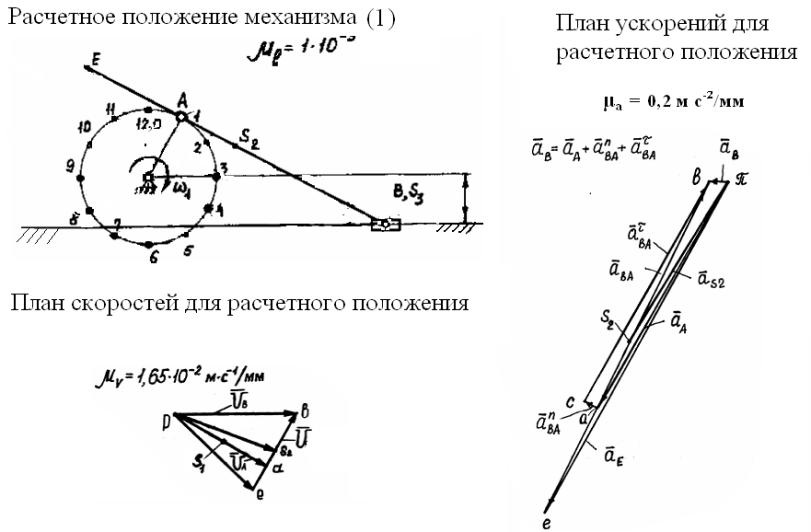
пункты задания и вычерчивать схему. Укажем только, что рассматривается схема I - кривошипно-ползунный механизм (рисунок 1).
Числовые данные:
lOA
= 22 мм = 0,022 м; le =
16 мм = 0,016 м; lAB = 75
мм = 0,075 м; lAE = 35 мм = =
0,035 м; w1 = 30 рад/c.
Расчетное положение – 1.
5.3.1 Выполнение задачи 1 -
Кинематический анализ механизма
5.3.1.1 Вычерчивание расчетного положения
механизма
Выбираем масштаб плана положений
ml =
1·10-3 м/мм.
Тогда  мм.
мм.
Остальные размеры определяются аналогично:
e =16
мм; АВ = 75 мм; АЕ = 35 мм; ВЕ = АВ + АЕ = 110 мм.![]()
Методом засечек строим расчетное положение
механизма (рисунок 11).