АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра инженерной графики и прикладной механики
ПРИКЛАДНАЯ МЕХАНИКА
Методические
указания и задания
к выполнению расчетно-графических
работ
(для студентов всех форм обучения специальностей 050702 –
Автоматизация и управление, 050717 – Теплоэнергетика)
Алматы 2006
СОСТАВИТЕЛЬ: А.Д. Динасылов. Прикладная механика. Методические указания и задания к выполнению расчетно-графических работ (для студентов всех форм обучения специальностей 050702 – Автоматизация и управление, 050717 – Теплоэнергетика). - Алматы: АИЭС, 2006. – 37 с.
Дисциплина
«Прикладная механика» является
для студентов высших учебных заведений, обучающихся по специальностям 050702
– Автоматизация и управление, и 050717 – Теплоэнергетика, дисциплиной по
выбору. В данной методической разработке, предназначенной для студентов этих
двух специальностей, приводятся задания
к расчетно-графическим
работам, методические указания к их выполнению, примеры выполнения работ. Дан список
рекомендуемой литературы.
Ил. 22, табл. 15,
библиогр. – 10 назв.
Рецензент:
канд. техн. наук, доцент М.Ш. Мукашев.
Печатается по плану издания Алматинского
института теплоэнергетики и связи на 2006 г.
© Алматинский
институт теплоэнергетики и связи, 2006 г.
1 Общие требования и указания к выполнению
расчетно-графических работ
Согласно учебным планам студенты, обучающиеся
по специальности «Автоматизация и управление», выполняют 3 расчетно-графические
работы (РГР), а обучающиеся по специальности «Теплоэнергетика», выполняют 4 РГР по дисциплине «Прикладная
механика» в соответствии с числом кредитов, отводимых на изучение дисциплины.
Тематика РГР относится к разделам «Теоретическая механика», «Теория механизмов»
и «Сопротивление материалов» курса.
Условия задач приведены в десяти схемах и
десяти вариантах. Студент должен взять для выполнения номер схемы, который
показан римскими цифрами на соответствующем рисунке, по последней цифре шифра
зачетной книжки, а вариант с цифровыми данными из соответствующей таблицы – по
предпоследней цифре шифра. Так, студент, зачетная книжка которого имеет шифр
96472, должен для каждой задачи выбрать схему II и цифровые данные, соответствующие варианту
7. Если последняя цифра шифра нуль, то следует взять схему X, а если предпоследняя цифра нуль, то данные
из таблицы принимаются по варианту 10.
При окончательной сдаче РГР каждая работа
должна быть сброшюрована отдельно. Выполненная работа состоит из текстовой и
графической частей. Оформление работы должно выполняться четким почерком на
листах белой бумаги формата А4. Объем графической части в задачах 3 и 4 - два
листа формата А3 (по одному на задачу). В этих задачах каждое графическое
построение или группа однотипных построений должны иметь поясняющую надпись и
масштабный коэффициент (с размерностью), который следует выбирать так, чтобы
построения были достаточно крупными, и листы не имели пустых мест.
Каждая РГР должна содержать титульный лист, и по каждой задаче,
входящей в РГР, должны быть приведены задание, выполненные расчеты, графические
построения, выводы. Работа должна быть оформлена согласно принятым нормам (СТП
768-01-07-97); на листах текст должен быть только с одной стороны, в конце
каждой РГР должен быть приведен список использованной литературы. Как
графическая, так и расчетная часть
работы, а также текстовый материал могут быть выполнены с помощью компьютерных
средств.
Для студентов специальности «Автоматизация и
управление» РГР №1 включает задачи 1, 2, РГР№2 – задачу 3, РГР№3 – задачи 5, 6.
Студенты специальности «Теплоэнергетика»,
кроме перечисленных выше работ, выполняют еще РГР №4, включающую в себя задачу
4.
Прежде чем приступать к решению задачи,
студент должен ознакомиться с соответствующим теме задачи теоретическим материалом
по лекциям, учебникам и учебным пособиям, с указаниями к решению задачи и
примером, приведенными в настоящей методической разработке.
Выполненные РГР должны быть защищены
студентов. Для защиты надо ответить на 2-3 вопроса по теме или решить подобную
задачу.
2 Задачи, входящие в расчетно-графические
работы, указания к их выполнению и примеры
2.1 Задача 1.
Равновесие пространственной системы сил
Однородная прямоугольная плита весом P = 6 кН со сторонами AB = 3l, BC = 2l закреплена в точке A сферическим шарниром, а в точке B цилиндрическим шарниром
(подшипником) и удерживается в равновесии невесомым стержнем CC' (рисунок 1). На плиту действует
пара сил с моментом М = 6 кН·м, лежащая в плоскости плиты, и две силы.

Таблица 1
|
Сила |
|
|
|
|
||||
|
|
F1=14
кH |
F2=16
кH |
F3=8 кH |
F4=10
кH |
||||
|
Номер условия |
Точка прилож. |
|
Точка прилож. |
|
Точка прилож. |
|
Точка прилож. |
|
|
1 |
D |
60 |
– |
– |
E |
0 |
– |
– |
|
2 |
H |
90 |
D |
30 |
– |
– |
– |
– |
|
3 |
– |
– |
E |
60 |
– |
– |
D |
90 |
|
4 |
– |
– |
– |
– |
D |
60 |
H |
0 |
|
5 |
E |
0 |
– |
– |
H |
60 |
– |
– |
|
6 |
– |
– |
D |
60 |
H |
0 |
– |
– |
|
7 |
– |
– |
H |
30 |
– |
– |
D |
0 |
|
8 |
E |
30 |
H |
90 |
– |
– |
– |
– |
|
9 |
– |
– |
– |
– |
D |
0 |
E |
60 |
|
10 |
– |
– |
E |
90 |
D |
30 |
– |
– |



Значения этих сил, их направления и точки
приложения указаны в таблице 1; при этом силы ![]() и
и ![]() лежат в плоскостях, параллельных плоскости xy, сила
лежат в плоскостях, параллельных плоскости xy, сила ![]() - в плоскости, параллельной плоскости xz, сила
- в плоскости, параллельной плоскости xz, сила ![]() - в
плоскости, параллельной плоскости yz.
Точки приложения сил (D, E, H)
находятся в серединах сторон плиты.
- в
плоскости, параллельной плоскости yz.
Точки приложения сил (D, E, H)
находятся в серединах сторон плиты.
Определить реакции связей в
точках А, B и C.
При окончательных подсчетах
принять l = 1,0 м.
Указания. Эта задача является задачей на равновесие
тела под действием пространственной системы сил. При ее решении нужно учесть,
что реакция сферического шарнира (или подпятника) имеет три составляющие, а
реакция цилиндрического шарнира (подшипника) – две составляющие, лежащие в
плоскости, перпендикулярной оси шарнира. При вычислении моментов силы ![]() зачастую
удобно разложить ее на составляющие
зачастую
удобно разложить ее на составляющие ![]() и
и ![]() ,
параллельные координатным осям; тогда, по теореме Вариньона,
,
параллельные координатным осям; тогда, по теореме Вариньона, ![]() и
т.д.
и
т.д.
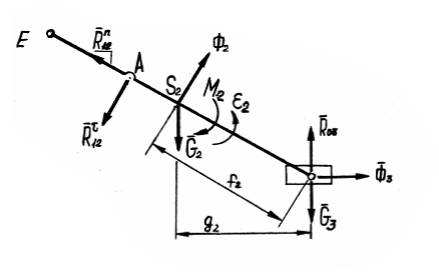
Пример 1. Вертикальная прямоугольная плита весом P (рисунок 2) закреплена сферическим шарниром в точке
А, цилиндрическим (подшипником) в точке В и невесомым стержнем DD´, лежащим в плоскости,
параллельной плоскости yz. На плиту действуют
сила ![]() (в плоскости xz), сила
(в плоскости xz), сила ![]() (параллельная оси y) и пара сил с моментом М ( в плоскости плиты).
(параллельная оси y) и пара сил с моментом М ( в плоскости плиты).
 Дано: P=5 кH, M=3 кH·м, F1=6 кH, F2=7,5 кH, α= 300,
AB=1 м, ВС=2 м, СЕ=0,5АВ, ВК=0,5ВС.
Дано: P=5 кH, M=3 кH·м, F1=6 кH, F2=7,5 кH, α= 300,
AB=1 м, ВС=2 м, СЕ=0,5АВ, ВК=0,5ВС.
Определить: реакции опор А, В и стержня DD´.
Решение:
а) рассмотрим равновесие плиты. На плиту действуют
заданные силы ![]()
![]() ,
, ![]() и пара сил с моментом М, а также реакции
связей. Реакцию сферического шарнира разложим на три составляющие
и пара сил с моментом М, а также реакции
связей. Реакцию сферического шарнира разложим на три составляющие ![]() ,
,![]() ,
, ![]() ,
цилиндрического (подшипника) – на две составляющие
,
цилиндрического (подшипника) – на две составляющие ![]() ,
, ![]() (в
плоскости, перпендикулярной оси подшипника), реакцию
(в
плоскости, перпендикулярной оси подшипника), реакцию ![]() стержня
направим вдоль стержня, предполагая, что он растянут;
стержня
направим вдоль стержня, предполагая, что он растянут;
б) для определения шести неизвестных реакций
составляем шесть уравнений равновесия
для действующей на плиту пространственной системы сил:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
Для определения момента силы ![]() относительно оси разлагаем
относительно оси разлагаем ![]() на составляющие
на составляющие ![]() и
и ![]() ,
параллельные осям x и z
,
параллельные осям x и z ![]() , и применяем теорему Вариньона. Аналогично можно
поступить при определении моментов реакции
, и применяем теорему Вариньона. Аналогично можно
поступить при определении моментов реакции
![]() .
.
Подставив в составленные уравнения числовые значения
всех заданных величин и решив эти уравнения, найдем, чему равны искомые
реакции.
Ответ: XA=-5,2
кН, YA=-3,8
кН, ZA=28,4
кН, YB=-7,5
кН, ZB=-12,4
кН, N=14,5 кН. Отрицательный знак указывает, что силы ![]() ,
, ![]() и
и ![]() направлены противоположно направлениям,
показанным на рисунке 2.
направлены противоположно направлениям,
показанным на рисунке 2.
2.2 Задача 2. Задача на применение теоремы об изменении кинетической энергии системы
Механическая система (рисунок 3) состоит из
грузов 1 и 2 (коэффициент трения грузов о плоскость f = 0,1), цилиндрического
сплошного однородного катка 3 и ступенчатых шкивов 4 и 5 с радиусами ступеней R4
= 0,3 м, r4 = 0,1 м, R5 = 0,2 м, r5 = 0,1 м
(массу каждого шкива считать равномерно распределенной по его внешнему ободу).
Тела системы соединены друг с другом гибкими нерастяжимыми нитями, намотанными
на шкивы; участки нитей параллельны соответствующим плоскостям. Под действием
силы F = F(s), зависящей от
перемещения точки приложения
силы, система приходит
в движение из состояния покоя. При движении системы на шкивы 4 и 5
действуют постоянные моменты сил сопротивления, равные соответственно M4
и M5.
Значения масс и моментов сопротивлений
принять по таблице 2; там же указана величина, которую требуется определить
(здесь обозначено: v1 – скорость груза 1, vС3 – скорость
центра масс катка, w4 – угловая скорость тела 4 и т.д.). Значение искомой величины нужно
найти для момента времени, когда перемещение точки приложения силы F равно s1.
В случае, когда какая-либо масса равна нулю, соответствующий груз на схеме изображать не следует.
Указания. Задача 2 является задачей на
применение теоремы об изменении кинетической энергии системы (раздел «Основы
динамики твердого тела и системы»). При решении задачи следует учитывать, что
кинетическая энергия системы равна сумме кинетических энергий всех входящих в
систему тел. Эту энергию надлежит выразить через ту скорость, которую требуется
определить в задаче. При вычислении энергии катка, находящегося в
плоскопараллельном движении, для установления зависимости между угловой
скоростью и скоростью его центра масс нужно воспользоваться понятием о
мгновенном центре скоростей. При определении работы все перемещения следует
выразить через заданное перемещение s1, учитывая, что зависимость
между перемещениями здесь будет такой же, как между соответствующими
скоростями.
Таблица 2
|
Вариaнт |
m1, кг |
m2,
кг |
m3, кг |
m4, кг |
m5, кг |
M4, Н м |
|
1 |
2 |
0 |
4 |
6 |
0 |
0 |
|
2 |
6 |
0 |
2 |
0 |
8 |
0,6 |
|
3 |
0 |
4 |
6 |
8 |
0 |
0 |
|
|
1 |
2 |
4 |
0 |
10 |
0.3 |
|
5 |
8 |
0 |
2 |
6 |
0 |
0 |
|
6 |
8 |
0 |
4 |
0 |
6 |
0.9 |
|
7 |
0 |
6 |
2 |
8 |
0 |
0 |
|
8 |
0 |
4 |
6 |
0 |
10 |
0.6 |
|
9 |
6 |
0 |
4 |
0 |
8 |
0.3 |
|
10 |
0 |
4 |
6 |
10 |
0 |
0 |
Продолжение таблицы 2
|
Вариант |
M5,
Н м |
F = F(s), Н |
s1,
м |
Найти |
|
1 |
0.8 |
50 (2+3s) |
1.0 |
v1 |
|
2 |
0 |
20 (5+2s) |
1.2 |
w5 |
|
3 |
0.4 |
80 (3+4s) |
0.8 |
vC3 |
|
4 |
0 |
40 (4+5s) |
0.6 |
v2 |
|
5 |
0.6 |
30 (3+2s) |
1.4 |
w4 |
|
6 |
0 |
40 (3+5s) |
1.6 |
v1 |
|
7 |
0.8 |
60 (2+5s) |
1.0 |
w4 |
|
8 |
0 |
30 (8+3s) |
0.8 |
w5 |
|
9 |
0 |
40 (2+5s) |
1.6 |
vC3 |
|
10 |
0.4 |
50 (3+2s) |
1.4 |
v2 |
Пример 2. Механическая система (рисунок 4)
состоит из сплошного цилиндрического катка 1, ступенчатого шкива 2 с радиусами
ступеней r2 и R2 (массу шкива считать распределенной
равномерно по его ободу) и груза 3 (коэффициент трения груза о плоскость равен
f ). Тела системы соединены между собой гибкими нерастяжимыми нитями,
намотанными на шкив 2. Под действием силы
F =F(s), зависящей от перемещения s точки ее приложения, система
приходит в движение из состояния покоя. На шкив при движении
Таблица 2
|
Вари- aнт |
m1, кг |
m2, кг |
m3, кг |
m4, кг |
m5, кг |
M4, Н м |
M5, Н м |
F = F(s), Н |
s1, м |
Найти |
|
1 |
2 |
0 |
4 |
6 |
0 |
0 |
0.8 |
50 (2+3s) |
1.0 |
v1 |
|
2 |
6 |
0 |
2 |
0 |
8 |
0,6 |
0 |
20 (5+2s) |
1.2 |
w5 |
|
3 |
0 |
4 |
6 |
8 |
0 |
0 |
0.4 |
80 (3+4s) |
0.8 |
vC3 |
|
4 |
0 |
2 |
4 |
0 |
10 |
0.3 |
0 |
40 (4+5s) |
0.6 |
v2 |
|
5 |
8 |
0 |
2 |
6 |
0 |
0 |
0.6 |
30 (3+2s) |
1.4 |
w4 |
|
6 |
8 |
0 |
4 |
0 |
6 |
0.9 |
0 |
40 (3+5s) |
1.6 |
v1 |
|
7 |
0 |
6 |
2 |
8 |
0 |
0 |
0.8 |
60 (2+5s) |
1.0 |
w4 |
|
8 |
0 |
4 |
6 |
0 |
10 |
0.6 |
0 |
30 (8+3s) |
0.8 |
w5 |
|
9 |
6 |
0 |
4 |
0 |
8 |
0.3 |
0 |
40 (2+5s) |
1.6 |
vC3 |
|
10 |
0 |
4 |
6 |
10 |
0 |
0 |
0.4 |
50 (3+2s) |
1.4 |
v2 |
Пример 2. Механическая система (рисунок 4) состоит из сплошного цилиндрического катка 1, ступенчатого шкива 2 с радиусами ступеней r2 и R2 (массу шкива считать распределенной равномерно по его ободу) и груза 3 (коэффициент трения груза о плоскость равен f ). Тела системы соединены между собой гибкими нерастяжимыми нитями, намотанными на шкив 2. Под действием силы F =F(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя. На шкив при движении действует момент сил сопротивления M2.
Определить: скорость центра масс катка vС1 в момент времени, когда s =
= s1.
Дано: m1 = 4 кг; m2 = 10 кг; m3 = 8 кг; R2 = 0,2 м; r2 = 0,1 м; f = 0,2; M2 = =0,6 Н·м; F = 2(1 +2s) Н; s1 = 2 м.
Решение.
Рассмотрим движение неизменяемой механической
системы, состоящей из тел 1, 2 и 3, соединенных нитями. Изобразим все
действующие на систему внешние силы: активные ![]() , момент сопротивления M2, реакции
, момент сопротивления M2, реакции ![]() и силы трения
и силы трения ![]() .
.![]()
Скорость vС1 будем определять, исходя из теоремы об изменении кинетической энергии
системы. Эта теорема гласит, что изменение кинетической энергии системы за
какое-либо время движения равно сумме работ, которые совершают все внешние
силы, действующие на систему, за тот же отрезок времени
T-T0 =
![]() A
A![]() . (1)
. (1)
Определяем
T0 и T.
Так как в начальный момент система находится в покое, то T0 = 0. Величина T равна
сумме энергий всех тел системы
T = T1+T2+T3.
(2)
Учитывая, что тело 1 движется
плоскопараллельно, тело 3 – поступательно, а тело 2 вращается вокруг
неподвижной оси, получаем
T1 = ![]() , T2 =
, T2 = ![]() , T3
=
, T3
= ![]() . (3)
. (3)
Все скорости, входящие в это выражение, нужно
выразить через искомую скорость vС1. Учитывая, что
точка K1 является мгновенным центром скоростей катка
1, и, обозначив радиус катка через r1, получаем
 ,
,
 ,
,  . (4)
. (4)
Моменты инерции определяются как![]()
IC1
= 0,5m1·r![]() , I2 = m2·R
, I2 = m2·R![]() ,
(5)
,
(5)
Подставляя выражения (6) и (5) в формулы (3)
и используя равенство (2), получаем
T =  . (6)
. (6)
Находим сумму работ всех действующих на
систему сил на перемещениях, соответствующих перемещению точки С1 на величину s1. При этом все перемещения выразим через s1, для чего учтем, что зависимости между
перемещениями имеют такой же вид, как зависимости между соответствующими
скоростями в формулах (4), то есть:
φ2 = s1/R2, s3 = s1 (r2/R2). Тогда
A(![]() ) =
) =
![]() ,
,
A(![]() ) =
G1·s1·sin60˚,
) =
G1·s1·sin60˚,
A(![]() ) =
- M2·
) =
- M2·![]() = - M2
= - M2![]() ,
,![]()
A(![]() ) =
- G3·s3sin30˚= - G3·s1
) =
- G3·s3sin30˚= - G3·s1![]() sin30˚,
sin30˚,
A(![]() ) =
- F3ТР·s3 =
- f·G3·cos30˚·s1
) =
- F3ТР·s3 =
- f·G3·cos30˚·s1![]() .
.
Работа остальных сил равна нулю, так как
точка K1, где приложены силы ![]() и
и ![]() – мгновенный центр скоростей, точка O, где приложены
– мгновенный центр скоростей, точка O, где приложены ![]() и
и ![]() , неподвижна, а реакция
, неподвижна, а реакция ![]() перпендикулярна перемещению груза 3. Тогда
окончательно
перпендикулярна перемещению груза 3. Тогда
окончательно

 (7)
(7)
Подставляя выражения (6) и (7) в уравнение
(1) и учитывая, что T0 = 0, получаем
 =
=
= 2(![]() ) +
G1·s1·sin60˚ - M2
) +
G1·s1·sin60˚ - M2![]() - G3·s1
- G3·s1![]() sin30˚
sin30˚  . (8)
. (8)
Подставляя сюда числовые значения,
найдем
vC1= 0,23 м/с.
2.3 Задача 3. Кинематический анализ механизма
Для заданных схемы механизма (рисунки
А.1-А.10 в приложении А), варианта числовых данных (таблицы А.1-А.10 в
приложении А) и расчетного положения требуется выполнить следующее:
а) построить план положений механизма (при
общем изображении стойки) согласно равноотстоящим пронумерованным положениям
входного звена 1, показанным на схеме механизма. Размеры звеньев согласно
обозначению их точек на схеме механизма и значение угловой скорости w1 входного звена 1 указаны в соответствующем вертикальном столбце
таблицы числовых данных;
б) для расчетного положения механизма
построить план скоростей. На плане показать векторы скоростей всех точек,
обозначенных на схеме механизма буквами, в том числе и точек S - центров масс
звеньев, которые при стержневой форме звена считать находящимися на серединах
их полных длин;
в) построить план ускорений механизма для
расчетного положения механизма. Найти векторы ускорений всех точек, указанных в
пункте б.
Указания.
Для успешного выполнения контрольных
работ рекомендуется:
а) изучить теоретический материал по теме работы, используя учебную и методическую литературу, например, [2-4],
а также конспект лекций;
б) проработать
материал §6 сборника задач [4]: ознакомиться с методическими указаниями,
содержащими подробно разобранные примеры (с.37-39, 43-56); просмотреть задачи 91-126, ответы к которым
приведены в графической форме;
в) для задач 3 и 4, кроме номера схемы и варианта,
задается расчетное положение механизма, которое следует принять по третьей от
конца цифре шифра зачетной книжки.
Пример. Для кривошипно-ползунного механизма (схема I на
рисунке А.1) выполнить решение по условиям задачи 3 при следующих числовых
данных: lOA = =22 мм = 0,022 м; le = 16 мм = 0,016 м; lAB
= 75 мм = 0,075 м; lAE = 35 мм = 0,035 м; w1 = 30
рад/c. Расчетное положение – 1.
Решение.
Начнем выполнение задания с вычерчивания расчетного
положения механизма.
Выбираем масштаб плана положений
ml = 1·10-3 м/мм.
Тогда  мм.
мм.
Остальные размеры определяются аналогично:
e =16 мм; АВ =
75 мм; АЕ = 35 мм; ВЕ = АВ + АЕ = 110 мм.![]()
Методом засечек строим расчетное положение механизма
(рисунок 5).
Построение плана скоростей.
Скорость точки А направлена перпендикулярно ОА в
сторону вращения кривошипа и равна
vA=w1·lOA=30·0,022=0,66
м/c.
Будем изображать вектор скорости точки A на планах скоростей вектором ![]() ;
длину вектора назначим, например, равной 40 мм (здесь точка p является полюсом плана скоростей). Тогда масштаб
плана скоростей
;
длину вектора назначим, например, равной 40 мм (здесь точка p является полюсом плана скоростей). Тогда масштаб
плана скоростей
![]()
 м·с-2/мм.
м·с-2/мм.
Скорость точки В может быть определена из векторного
равенства

Здесь и во всех других векторных соотношениях
одинарное подчеркивание вектора означает, что известно его направление (показанное
под подчеркиванием), а двойное подчеркивание означает, что известны как его
направление, так и его величина (модуль). Под векторами указаны их направления.
Скорость точки B на плане скоростей (рисунок 5)
изображается вектором ![]() . Вектор
. Вектор
![]() изображает
относительную скорость
изображает
относительную скорость ![]() .
Точку e, определяющую скорость точки E, найдем, пропорционально увеличив длину отрезка ab.
.
Точку e, определяющую скорость точки E, найдем, пропорционально увеличив длину отрезка ab.





 ,
, ,
, ,
, .
. 
 .
.