МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
Алматинский институт энергетики и связи
Кафедра телекоммуникационных систем
МНОГОКАНАЛЬНЫЕ ТЕЛЕКОММУНИКАЦИОННЫЕ СИСТЕМЫ
Конспект лекций
для студентов всех форм обучения по специальности
050719 – Радиотехника, электроника и телекоммуникации
Алматы 2009
СОСТАВИТЕЛЬ: Агатаева Б.Б. Многоканальные телекоммуникационные системы. Конспект лекций для студентов всех форм обучения, специальности 050719 – Радиотехника, электроника и телекоммуникации. – Алматы: АИЭС, 2009. – 60 с.
Конспект лекций предназначен для самостоятельного изучения курса «Многоканальные телекоммуникационные системы». В конспекте приведен обзор основных элементов многоканальной системы связи в телекоммуникации. Необходимость самого конспекта лекций обусловлена потребностью более глубокого понимания процессов, происходящих в области проводной связи а также в телекоммуникациях. Развитие телекоммуникации не стоит на месте, появляются новые способы реализации тех или иных технических решений создания телекоммуникационных сетей, новые стандарты передачи информации, поэтому в конспекте лекций, помимо описания основных принципов построения технических схем, представлены ссылки на литературу, которая может быть использована при изучении той или иной темы. Приведены основные структурные и принципиальные схемы, необходимые для понимания процессов, происходящих в области телекоммуникации.
Конспект лекций предназначен (для студентов всех форм обучения), по специальности 050719 – Радиотехника, электроника и телекоммуникации.
Содержание
Введение................................................................................................. 4
1Лекция№1. Основные понятия и определения. Система передачи электрических сигналов первичных сетей. Основные характеристики сигналов......... 5
2Лекция№2.Электрические сигналы и их характеристики. Амплитудные фазочастотные искажения сигналов …….......................11
3Лекция№3.Генераторное оборудование. Особенности реализации отдельных блоков генераторного оборудования ……………………...13
4 Лекция№4. Одно и двухнаправленные системы передачи……….…18
5 Лекция № 5 Шумы в линии передачи. Расчёт длины усилительного участка……….........23
6 Лекция №6 Системы передачи с временным разделением каналов
с частотным разделением сигналов...................................................... 26
7 Лекция №7. А и m законы квантования………..……………………..29
8 Лекция №8 Методы ИКМ…………………………………………….33
9 Лекция №9. Некоторые свойства сигналов АИМ-1 и АИМ-2. Обобщенная структурная схема оконечной цифровой станции…….35
10 Лекция№10. Формирование структуры цикла передачи ЦСП……………………………………….41
11Лекция№ 11. Иерархия цифровых СП. Способы передачи цифровых сигналов по линии. Синхронизация в цифровых СП с ИКМ…………45
12Лекция№12.Цифровой линейный тракт (ЦЛТ).Способы уменьшения искажений. Линейные коды ЦСП……………………………………………………….49
Список литературы………………………………………………………56
Введение
Исторически электросвязь зарождалась как средство общения между собой вначале лишь нескольких близко живущих абонентов. На расстоянии десятки-сотни километров связь осуществлялась по воздушным проводам в виде телеграфной, а постепенно и телефонной связи.
Потребности человека в связи росли и растут сейчас весьма стремительными темпами. Потребовалась связь между населёнными пунктами, между городами, регионами и, наконец, между странами и континентами. Появились новые виды связи: телевидение, факсимильная передача, радиовещание, цифровая связь и многое другое. На пути технического осуществления потребностей в связи возникает множество проблем.
 С изменениями условий жизни, развитием культуры и
техники средства общения между людьми (средства связи) непрерывно
совершенствуются. Сегодня средства связи стали неотъемлемой частью
производственного процесса и нашего быта. Современные системы связи должны не
только гарантировать быструю обработку и надежность передачи информации, но и
обеспечивать выполнение этих условий наиболее экономичным способом. Высокая стоимость
линии связи объясняет разработку систем и методов, позволяющих одновременно
передавать по одной линии связи большое число независимых сообщений, т.е.
использовать линию многократно. Такие системы передачи называются
многоканальными. Связь, осуществляемую с помощью этих систем, принято называть
многоканальной. Основной задачей, которая решается при создании многоканальной
связи, является увеличение дальности связи и числа каналов.
С изменениями условий жизни, развитием культуры и
техники средства общения между людьми (средства связи) непрерывно
совершенствуются. Сегодня средства связи стали неотъемлемой частью
производственного процесса и нашего быта. Современные системы связи должны не
только гарантировать быструю обработку и надежность передачи информации, но и
обеспечивать выполнение этих условий наиболее экономичным способом. Высокая стоимость
линии связи объясняет разработку систем и методов, позволяющих одновременно
передавать по одной линии связи большое число независимых сообщений, т.е.
использовать линию многократно. Такие системы передачи называются
многоканальными. Связь, осуществляемую с помощью этих систем, принято называть
многоканальной. Основной задачей, которая решается при создании многоканальной
связи, является увеличение дальности связи и числа каналов.
Рисунок 1 – Структурная схема системы связи.
Развитие многоканальной связи начинается с создания дуплексных усилителей.
В 1915 г инженер, капитан русской армии В.И. Коваленков продемонстрировал макет ламповых телефонных трансляторов на Всероссийском съезде инженеров-электриков. Предложенная им идея двустороннего действия с дифференциальной системой (ДС) соединения до сих пор остается основой построения дуплексных усилителей каналов ТЧ. В 1922 г в селе Бологое был установлен первый телефонный транслятор системы Коваленкова, обеспечивающий уверенную связь Петрограда с Москвой. Были организованы телефонные магистрали большой протяженности (Москва-Тбилиси, Москва-Магнитогорск и др.), т.е. на этом этапе теоретически была решена проблема увеличения дальности.
В 1960-х годах началась разработка аппаратуры для цифровых систем передачи с временным разделением каналов (ЦСП с ВРК).
В 1970-х годах началась разработка и исследование волоконно-оптических систем передачи (ВОСП).
В 1980-х годах появились первые волоконно-оптические линии связи (ВОЛС), а затем ВОСП. В настоящее время на городских телефонных сетях (ГТС) активно внедряются ВОСП на базе метода импульсно-кодовой модуляции (ИКМ), такие, как ИКМ–120 4/5, ИКМ–48–5 (Сопка–1), на магистральных и зоновых сетях – «Сопка–2», «Сопка–3», «Сопка–4», «Сопка–5» и др.
Автоматизированные сети связи (АСС) делятся на два вида: первичная сеть и вторичная сеть связи.
Первичная сеть включает в себя совокупность сетевых узлов, станций, типовых сетевых каналов и трактов, имеющих универсальное назначение, и представляет собой систему каналов общего пользования.
Первичная сеть делится на магистральную и международную. Магистральная сеть обеспечивает связь на расстояние 12500 км., зоновая сеть – 600 км, местная сеть (сельская) – до 30 км.
В качестве направляющих систем для первичной сети широко используют симметричную и коаксиальную систему кабелей связи, оптический кабель, радиорелейные линии (РРЛ) и спутниковую связь.
1 Лекция №1. Основные понятия и определения.Система передачи электрических сигналов первичных сетей. Основные характеристики сигналов
Цель лекции: ознакомление основными терминами по телекоммуникации.
Изучение основных характеристик электрических сигналов и их параметров.
Содержание лекции: основном рассматривается термины электросвязи и характеристики основных сигналов телекоммуникации.
Линии передачи (линии связи) – это воздушные провода, скрученные пары проводников, собранные в многожильный кабель, коаксиальные кабели, оптоволоконные линии, волноводы, воздушная и космическая среда, т.е. это среда передачи сигнала.
Чтобы соединить между собой для передачи сообщений два или более абонента или их абонентские устройства, помимо линии передачи нужны ещё многие дополнительные устройства. Это различные преобразователи сигналов, коммутирующие устройства, промежуточные усилители и т.п. Такая совокупность технических средств и среды распространения образуют КАНАЛ ПЕРЕДАЧИ (КАНАЛ СВЯЗИ) сигнала от источника к получателю.
Канал передачи – это совокупность технических средств и среды обеспечивающих передачу сигнала ограниченной мощности в определенной области частот между двумя абонентами независимо от используемых физических линий передачи.
Канал передачи может быть организован для различных источников сообщений, с помощью различной аппаратуры, в том числе и изготовленной в различных странах, и через различные направляющие среды. Понятие канал передачи является одним из важнейших. Поэтому оно имеет однозначное толкование в любой стране. Каналу передачи придаются вполне определённые, стандартизованные свойства. Эти свойства определяются рекомендациями МСЭ-Т. Все каналы чётко стандартизованы, подробно описаны и на всех линиях они одинаковы.
По одной и той же линии связи может быть организовано несколько каналов связи. Причём и сами каналы могут быть разных видов – аналоговые или цифровые, или и те и другие. Поэтому нельзя путать понятия линия связи и канал связи. Один и тот же канал может быть образован в процессе соединения через участки с различными направляющими средами.
Про линию нельзя сказать, что она имеет такую-то пропускную способность до тех пор, пока не узнаешь во всех подробностях её построения, структуру направляющей среды, длину соединения и т.п. А если назвать канал, например телефонный канал, или канал радиовещания, то все его характеристики уже известны из рекомендаций МСЭ-Т. Пучки каналов связи образуют ТРАКТ.
По мере развития связи в том числе и в нашей стране, стало возможным соединять абонентов не только в переделах города, региона, но и в переделах всей страны и между странами. Все местные (городские, сельские) и региональные системы связи были объединены в Единую Автоматизированную Сеть Связи (ЕАСС) (теперь ВСС – взаимосвязанная система связи), в рамках которой действуют единые требования к применяемым линиям связи, оборудованию на узлах и станциях, коммутирующим устройствам и т.п. И самое главное, разработаны (и непрерывно отслеживаются необходимость модернизации) требования к параметрам сигналов от различных источников или различного оборудования. Места перехода от сигналов одного вида к сигналам другого вида называют СТЫКАМИ. Стыкование для различного оборудования, линий связи, переход на междугородние и международные линии – важнейшая и трудоёмкая часть по обеспечению связи.
Сеть ВСС строится по территориальному признаку. Низшая сеть – местная – городская, районная, сельская. Далее – внутризоновая сеть – в этой сети объединяются местные сети, соединяя райцентры и города в пределах области. Как правило, внутризоновая сеть совпадает с административным делением по краям и областям. В пределах этой сети все телефонные абоненты имеют одинаковое количество цифр в наборе номера. Структура внутризоновой сети обычно радиальная, т.е. областной центр радиально соединяется с другими телефонными узлами на данной территории. Магистральная сеть соединяет между собой все областные центры, объединяя внутризоновые сети в единую ВСС.
Для коммутации сообщений в сети необходимых мест строятся сетевые станции (СС) – обычно на концах линии передачи или на местах сквозного транзита - и сетевые узлы (СУ) на местах, где требуется обеспечивать коммуникацию на много направлений. Магистральная, внутризоновая и местная сеть совместно с СУ и линиями связи образует ПЕРВИЧНУЮ СЕТЬ. Для обеспечения передачи по первичной сети ВВС различных видов сигналов: телефонных, телеграфных, факсмильных, передачи газет, передачи данных, телевизионного и звукового вещания, а также для автоматического управления процессами коммутации сигналов по тем или иным маршрутам - потребовалось дополнительное оборудование и дополнительные связи между различным станционным оборудованием. На базе первичной сети была создана вторичная сеть, позволяющая более гибко организовывать различные пути передачи сигналов.
Вторичная сеть позволяет организовать на базе первичной сети, кроме телефонной связи, и другие виды связи, например, телеграфные сети, системы передачи данных, факсмильную связь, передачу телевизионных передач, звуковое вещание и т. п.
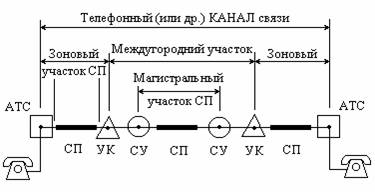 |
Рисунок 2- Структура составного канала сети ВСС.
СП – система передачи; АТС – автоматическая телефонная станция;
УК – узел коммутации; СУ – сетевой узел.
Для одновременной передачи N сигналов от N источников (пользователей) по одной и той же линии передачи эти сигналы необходимо объединить в некоторый единый сигнал, т.е. произвести обратное действие, т.е. разделение (разуплотнение).
Речь человека с достаточным качеством и разборчивостью можно передавать в полосе частот 300 ÷ 3400 Гц , т.е. полезная ширина канала, Δf=3,1кГц. Аналоговый сигнал с такой полосой связисты называют основным, тональным или речевым сигналом, а канал, по которому его передают, – телефонным каналом (речевым каналом, каналом тональной частоты).
Процесс уплотнения нескольких каналов называют ещё группообразованием, а в последнее время мультиплексированием.
Имеется два основных способа уплотнения-разделения:
1.Частотный метод разделения (объединения) каналов и основанная на этом методе система передачи с частотным разделением каналов (ЧРК).
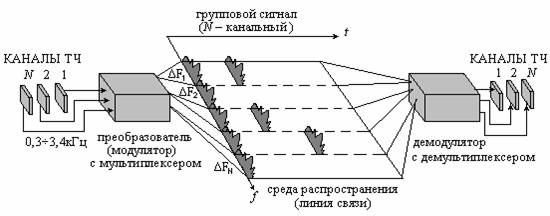 |
Рисунок 3- Принцип системы передачи с ЧРК.
Спектр каждого канала ТЧ с помощью модулятора переносится в более высокочастотную область, и с помощью мультиплексора все каналы объединяются в общий групповой поток с различными несущими частотами. При мультиплексировании используется лишь одна боковая полоса модулированного сигнала с подавлением несущей.
 |
2.Временной метод разделения каналов и на его основе система передачи с временным разделением каналов (СП с ВРК).
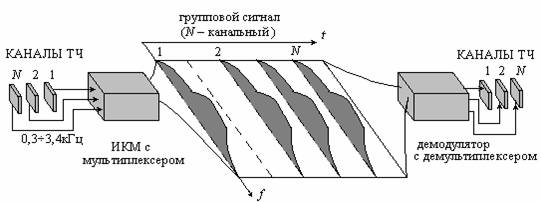
Рисунок 4-Принцип передачи сигналов систем передачи с ВРК.
Сигналы каждого канала тональной частоты (ТЧ) поочерёдно дискретизируются, квантуются и мультиплексируются. Каждый канал занимает весь спектр канала, но передается поочерёдно. Современные системы передачи (СП) должны обеспечивать передачу различных сигналов: телеграфные (ТЛГ); телефонные (ТЛФ); телевизионные (TВ); передачи данных (ПД) и т. п.
Все эти сигналы являются случайными функциями времени и наиболее полно могут быть описаны с помощью многопарного распределения плотности вероятности.
Любой сигнал характеризуется тремя основными показателями:
а) длительность сигнала – интервал времени, в течение которого сигнал существует. Чем меньше длительность сигнала, тем меньше времени линия будет занята;
б) ширина спектра – полоса частот, в пределах которой сосредоточена основная энергия сигнала. В большинстве случаев спектр нужно ограничивать. В частности, полоса частот:
1) телефонного канала
D FТЛФ = 0,3 – 3,4 кГц;
2) систем звукового вещания
D FЗВ = 300 – 10000 Гц или 0,3 – 10 кГц;
3) телевизионного канала
D FТВ = 6,5 МГц;
4) передачи данных
FПД = 1,5 Бод;
5) факсимильной связи
Fфакс = 180 кГц;
в) динамический диапазон – отношение наибольшего мгновенного значения мощности Рmax сигнала к наименьшей Pmin:
Дc = 10*lg ![]() , [дБ],
, [дБ],
где Pmin – определяется качеством передачи информации,
при которой сигнал может быть выделен из помех (часто Pmin = Ршума):
ДТЛФ = 35 – 40 дБ Дсимф оркестра > 95 дБ
Дфакс = 20 – 30 дБ Дкомп диск > 92 дБ
ДТВ = 40 дБ Дмагн ленты > 40 – 60 дБ
Дпластинка > 35 дБ
Уровни передач. Оценка количественных соотношений между мощностями, напряжениями и токами обычно приводится в логарифмических единицах, это объясняется рядом причин:
- упрощаются операции: умножение-сложение, деление-вычитание, возведение в степень;
- наше ухо имеет логарифмическую зависимость. Мы можем качественно судить о передаваемой информации.
Уровни мощности
Рм = 0,5*ln ![]() , [Нп]; Рн = 0,5*ln
, [Нп]; Рн = 0,5*ln![]() , [Нп]; Рм = 10*lg
, [Нп]; Рм = 10*lg ![]() [дБ];
[дБ];
Рi,н = 20*lg ![]() , [дБ]; Рх =
, [дБ]; Рх = ![]() ; Ро =
; Ро = ![]() ,
,
где Zx, Z0 – входное сопротивление трактов в точке измерения и в начале линии Zx = Zo = V = I.
Если подставим Рх и Ро в формулу (1.3), то получим
Pм = 10 * lg![]() = 10 * lg
= 10 * lg![]() ê- 10 *l g
ê- 10 *l g![]() =
Pн -10
* lg
=
Pн -10
* lg ![]() .ê
.ê
Аналогично
Рм = Рт+10*lg ![]() .
.
Если измеренные величины Р,U,I отнести к так называемым стандартным величинам, т.е. принятым за нулевой уровень, то значения
Ро = мВт; Io = 1,29 мА;
Uo = 0,775 В; Zo = 600 Ом
будут номинальными. Тогда уровни сигнала будут называться абсолютными.
Если уровни Р,U,I в рассматриваемой точке цепи определены относительно точки, принятой за начало тракта (иначе говоря точка нулевого отсчета уровня – ТНОУ), то эти уровни будут называться относительными
Рм отн = Рмх – Рмо; Рн отн = Рнх – Рмо; Рт отн = Рix –Pio.
В этом же случае
Рм отн = Рн отн –10 * lg ![]() ; Рм отн = Рт отн +10
* lg
; Рм отн = Рт отн +10
* lg![]() .
.
2 Лекция №2. Электрические сигналы и их характеристики. Амплитудные фазочастотные искажения сигналов. Дальность передачи по проводящим линиям
Цель лекции: общее ознакомление студентов с электрическими сигналами и их характеристиками, искажениями.
Содержание лекции: изучение основных характеристик сигналов и их параметров, среду их распространении.
Для передачи речи с удовлетворительной степенью разборчивости достаточно передать ограниченный диапазон частот 0,3-3,4 КГц. При этом не передаются высокочастотные составляющие спектра речевого сигнала, определяющие главным образом тембр или окраску речи. В следствии этого форма электрических колебаний несколько изменяется (рисунок 5).
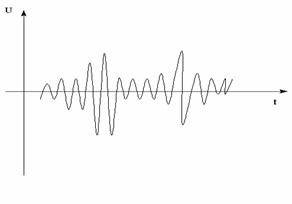
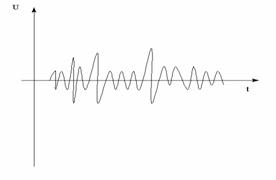
Рисунок 5- Форма электрических колебании сигналов.
Электрический сигнал – это процесс изменения электрического состояния цепи во времени, при котором в ней появляется спектр частот, дискретный при периодических и непрерывных при апериодических сигналах. Передать сигнал без искажений, не передавая его спектр, невозможно. Спектр реальных сигналов всегда ограничен, и следовательно, при их передаче существуют некоторые искажения , не превышающие допустимых искажений. Важнейшие характеристики сигнала:
1) Ширина спектра сигнала ∆F=Fmax –Fmin .
2) Динамический диапазон- отношение (пиковой) мощности Рc max сигнала к его минимальной мощности Р min , выраженное в логарифмических единицах. Под пиковой мощностью понимается мощность сигнала, превышаемая в течение определенного времени
Dc=10lg(Рc max / Р min) .
3) Длительность действия (время существования) сигнала определяет количество передаваемой информации.
Все три вышеприведённые важнейшие характеристики называются объёмом сигнала, то есть определяет объём передаваемой информации.
В реальных условиях сигналы связи передаются по линиям передачи, в которых действуют различного вида помехи. Из этих соображений обычно рассматривается и номеруется особая величина- защищенность сигнала от того или иного вида помехи.
Под защищённостью понимается разность уровней сигнала и помехи в данной точке канала связи:
Азащ=Рс-Рп=10lg(Pс/Pп)
Следует заметить, что реальный сигнал является не периодическим, случайным процессом. Тем не менее в целях упрощения будем считать , что сигнал представляет собой спектр конечного числа n дискретных составляющих, каждая из которых имеет определённую амплитуду Ui частоту Ωi и фазу φi , то есть U = Σ n=1 Ui cos(Ωi +φi)
Иными словами, что сигнал представляет собой периодический процесс.
Дальность передачи по проводящим линиям. Прежде чем приступить к изучению способов организации на одной линии передачи нескольких независимых друг от друга телефонных сигналов рассмотрим более простой способ передачи электрического сигнала по физическим цепям воздушной или кабельной линии. Дальность телефонной передачи по проводным линиям зависит от их затухания , амплитудных и фазовых искажений сигнала, помех разного рода времени распространения и некоторых других явлений.
В технике многоканальной телефонной связи необходимо достаточно хорошо согласовывать входные сопротивления элементов цепи друг с другом. Дальность телефонной передачи по затуханию в децибелах может быть определена из выражения для собственного затухания цепи:
a=α*l (1)
где α-коэфицент затухания физической цепи, f=800 Гц ; l-длина цепи (км),
отсюда дальность связи определяется:
l=a/α (2).
Мощность электрических колебаний на выходе телефонного аппарата Pпер=1мВТ, чувствительность телефона, то есть минимальная мощность электрических колебаний, которую нужно подвести к нему, чтобы абоненты могли разговаривать, Рпр=0,001 мВт.
Отсюда максимально допустимое значение затухания всего тракта передачи:
а=10lg(Pпер/Рпр)=10lg1000=30Дб (3)
Это затухание принимают а=29,4 Дб. Но телефонный аппарат абонента непосредственно в междугородную линию не включают (смотри рисунок).
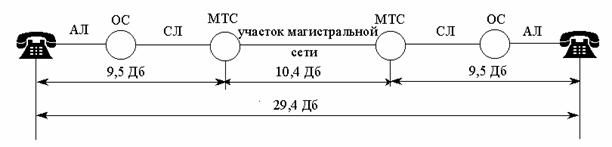 Рисунок 6- Дальность
телефонной передачи сигналов.
Рисунок 6- Дальность
телефонной передачи сигналов.
Дальность телефонной передачи по каналу низкочастотной (НЧ) можно определить по формуле (2), принимая затухание а=9-10 Дб.
Расчёты показывают, что дальность непосредственной телефонной передачи по воздушным медным цепям с диаметром 3-4 мм составляет 270-340 км, по воздушным биметаллическим цепям 4 мм и толщиной медной оболочки 0,4 мм-160-180 км, по стальным воздушном проводам диаметром 4-5 мм –40-75 км, по симметричным кабельным непупинизированными цепями с жилами 0,9- 1,2 мм – 15-25 км и т.д.
Амплитудные фазочастотные искажения сигналов возрастают с увеличением длины линейной цепи и поэтому также ограничивают дальность передачи. При телефонной передачи большое значение имеют АЧ искажения, обусловленные зависимостью затухания линейной цепи от частоты сигнала. С увеличением длины цепи эти искажения могут вызвать столь большое искажение передаваемых речевых сигналов, что нельзя будет понять говорящего. Фазочастотные искажения обусловлены неодинаковой скоростью распространения по линейной цепи составляющих сигнала разных частот. Они не оказывают заметного влияния на качество передачи речевых сигналов на небольшие расстояния. Дальность телефонной передачи может быть увеличена уменьшением коэффициента затухания цепи и усилением электрических сигналов. Для уменьшения коэффициента затухания помимо применения проводов с большим диаметром или большей проводимостью может быть использован способ искусственного повышения индуктивности цепи- путенизация. Этот способ позволяет в несколько раз увеличить дальность передачи, однако не решает задачи организации связи на любые расстояния. К тому же путинизированная цепь, то есть цепь с включённым в неё через определённое расстояния катушками индуктивности, представляет собой ФНЧ, который ограничивает спектр частот передаваемого сигнала. Поэтому путинизированные цепи не могут быть использованы для организации большого числа каналов связи.
3 Лекция №3. Генераторное оборудование. Особенности реализации отдельных блоков генераторного оборудования
Цель лекции: изучение основных элементов генераторного оборудования, их характеристик и параметров.
Содержание лекции: усвоение студентами области применения генераторного оборудования многоканальных систем телекоммуникации.
Генераторное оборудования (ГО) служит для формирования импульсных последовательностей, используемых для управления работой функциональных узлов аппаратуры, производящих обработку сигналов, а также для синхронизации оконечного оборудования передающей и приемной станций. ГО выполняется отдельно для передающей и приемной частей оконечной станции.
ДР - делитель разрядный, ДК - делитель канальный, ДЦ - делитель цикловой, ЗГ - задающий генератор.
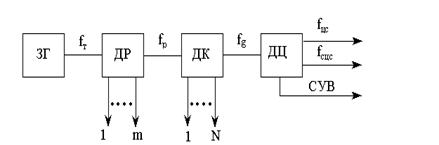
Рисунок 7- Структурная схема генераторного оборудования.
В задающем генераторе формируется последовательность импульсов fт при относительной стабильности частоты 10-5–10-6. Разрядный делитель предназначен для формирования и распределения разрядных импульсов кодовых групп. Частота их следования должна быть равна fр=fт/m. В канальном делителе производится формирование и распределение канальных импульсов, следующих с частотой и fд=fт/mN. Делитель цикловой служит для формирования импульсных последовательностей, используемых для формирования сигналов синхронизации по циклам и сверхциклам. В этом же делителе формируются импульсные последовательности сигналов согласования, управления и взаимодействия (СУВ).
Для системы ИКМ-30 fт=2048 кГц, m=8, fp=2048/8=256кГц, а частота канальных импульсов: fр=2048/8*32=2048/256=8кГц. Частота сигнала цикловой синхронизации 4кГц и СЦС: 8*103/16=500Гц.
Рассмотрим принцип работы делителей частоты, обеспечивающих одновременно распределение импульсных последовательностей одинаковой частоты во времени (Рисунок 8). В ячейку «И» подаются тактовые импульсы и сигнал с выхода инвертора, входы которого соединены с выходом ячейки «И» и отводами от всех ячеек регистра сдвига.
Особенности реализации отдельных блоков ГО. ГО первичной ЦСП должен обеспечивать последовательную передачу массива m-разрядных двоичных чисел f=8кГц от N каналов. Таким образом, ГО должно формировать последовательность импульсов для адресации передаваемого канала, последовательность для передачи сигналов синхронизации (СС) и СУВ. Во вторичных ЦСП и системах более высокого уровня, где происходит временное объединения первичных цифровых потоков, необходимо дополнительно формировать сигналы синхронизации для различения местоположения каждого из объединяемых потоков. Построение ГО высокоскоростных ЦСП (вторичной, третичной и т.д.) несколько отличается. В качестве примера ИКМ-120 в этой системе используются посимвольное уплотнение четырех первичных цифровых сигналов(от ЦСП1 до ЦСП4), имеющих номинальную тактовую частоту fт1. Структура выходного цифрового потока является циклической с периодом Тц, причем каждый цикл состоит из 4 подциклов (ПЦ1¸ПЦ4). В каждый подцикл входят уплотненные информационные биты, расположенные в 8 КИ четырех ЦСП и одна 8-ми разрядная группа служебных символов (СС).
 Рисунок 8- Принцип работы делителей частоты.
Рисунок 8- Принцип работы делителей частоты.
Цикловой синхросигнал вторичной ЦСП передается только в одном из подциклов. Остальные СС используются для передачи команд согласования скоростей цифровых потоков, служебной связи и т. п.. Таким образом, подцикл состоит из 264 импульсов (264=8+4*8*8), следующих с fт2=1/Тт2=1/(Тц/4*264)=Fд*4*264=fт1*(4*(264/256)) fт1 33/8 (здесь учтено, что fт=fд*8*32).
Структура вторичного цифрового сигнала формируется схемой, показанной на рисунке 9.
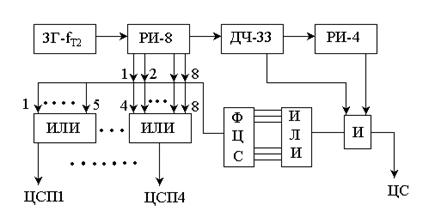
Рисунок 9- Структура вторичного цифрового сигнала.
ФЦС – формирователь циклового синхросигнала, РИ-4 распределитель импульсов.
Короткие импульсы fт2 тактовой частоты от 3Г поступают на распределитель импульсов (РИ-8), на 8 выходах формируются импульсные последовательности с частотой fт2/8. Импульсы с 1 и 5 выходов РИ-8 объединяются с помощью схемы ИЛИ-51 и образуют импульсный сигнал с частотой f02/4, который осуществляет «считывание» информационных сигналов первичной ЦСП1. Аналогично формируются считывающие импульсы для первичных ЦСП2+ЦСП4, при этом все выходы РИ-8 (2-й, 6-й-3-й и т.д.) объединяются с помощью схем ИЛИ 52¸54. Все выходы РИ-8 подключены к формирователю циклового синхросигнала (ФЦС), который совместно со схемой ИЛИ7 формирует синхрогруппу требуемого вида. Чтобы цикловой синхросигнал располагался в нужном подцикле, используется делитель частоты (ДЧ-33) и распределитель импульсов
(РИ-4). С помощью ДЧ-33 формируются импульсные сигналы, следующие с частотой 4Fд и расположенные на позициях СС. РИ-4 формируют четыре импульсные последовательности с частотой Fд. С помощью 3-входовой схемы И8 происходит выделение цикловой синхрогруппы, которая затем будет объединяться с уплотненными информационными сигналами.
Фильтры автоподстройки частоты (ФАПЧ). Если в качестве высокостабильного задающего генератора (ЗГ) используется настроенный на частоту fт2 , то схема синхронизации строится с использованием ФАПЧ (см. рисунок 10).
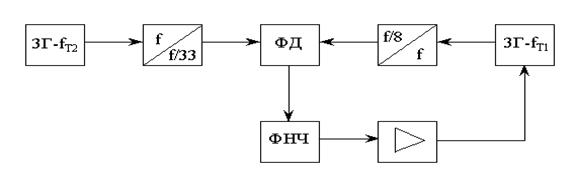 Рисунок 10 - Схема синхронизации с ФАПЧ.
Рисунок 10 - Схема синхронизации с ФАПЧ.
Здесь частоты автономных ЗГ (он настроен на частоту fт2) и ЗГ (настроенный на частоту fт1) с помощью делителей частоты f/33 и f/8 приводятся к почти одинаковым частотам, которые сравниваются фазовым детектором (ФД). Сигнал ошибки с выхода ФД после ФНЧ и усилителя поступает на ЗГ- fт1 и меняет его параметры так, чтобы обеспечить точное равенство: fт2/33= fт1/8. Поэтому при поступлении на вход ВД тактовых импульсов на выходе первого разряда регистра сдвига появится сигнал 1, а на остальных его выходах сигнал 0.
Устройство цикловой синхронизации в ГО. Для правильной обработки на приемной стороне приходящего цифрового сигнала (его регенерации, выделения символов, принадлежащих отдельным системам или каналам, декодирования цифровых комбинаций и т.п.) необходимо, чтобы ГО приёма и ГО передачи работали синхронно.
Синхронизацией ГО приема называется процесс установления и поддержания требуемых фазовых соотношений между значащими моментами цифрового сигнала, приходящего с пункта передачи, и цифрового сигнала, вырабатываемого ГО приёма. Различают несколько видов синхронизации:
а) синхронизация по тактам, т. е. fт=1/Тт;
б) синхронизация по кодовым комбинациям. Тк=m*Tт;
в) цикловая синхронизация;
г) сигналы канальной сигнализации;
д) сверхцикловая синхронизация;
е) системная синхронизация.
Синхронизация по тактам - это выделение символов следующих друг за другом через период Тт. Синхронизация по кодовым колебаниям (синхронизация по “словам”) – это группа символов образует m-разрядную комбинацию длительностью Tк=mТт, для выделения отдельной кодовой комбинации (для определения ее начала или конца).
Цикловая синхронизация служит для нахождения временного положения выборки определенного канала в импульсной последовательности. При циклической синхронизации достаточно узнать (определить) временное положение какого-то одного из каналов, а уже по нему легко найти временные позиции всех остальных каналов. Период цикловой синхронизации Тц равен (кратен) периоду повторения выборок одного из каналов, то есть периоду дискретизации: Тц=Тд=NTR. Без синхронизации по тактам и по циклам обойтись невозможно, а кодовая комбинация обеспечивается автоматически при наличии тактовой синхронизации.
Канальная сигнализация (вызова, номера абонента, занятия, отбоя и т.п.) передается поочередно в одном из канальных КИ цикла (например, ИКМ-30 конкретно в 16 мКИ). Для однократной передачи всех сигналов канальной синхронизации требуется время, которое занимает несколько циклов передачи - это время называется сверциклом. (в системе ИКМ-30 длительность СЦС Тщ=16 Тц). Сверхцикловая сигнализация служит для выполнения заданного сигнала канальной сигнализации. Системная синхронизация служит для того, чтобы знать порядок чередования символов(или групп символов), принадлежащих разным ЦСП (например, ЦКТ-120,480 и т.д.).
Предъявляемые требования к синхронизации: 1) состояние синхронизма, например, циклового, при котором цикл временного объединения принимаемого цифрового сигнала совпадает по времени с циклом, формируемым ГО приема, должен быть непрерывным и поддерживаться автоматически; 2) необходимо обеспечить малое время вхождения в синхронизм после сбоя синхронизма tвх.с£2мс; 3) потери пропускной способности канала связи, возникающие за счет введения синхронизирующей информации в сообщение, должны быть минимальными; 4) устройства синхронизации должны быть простыми, а их работа не должна значительно снижать эффективность систем связи.
Синхросигнал формируется по-разному:
- символы СС вводятся вместо информационных символов, при этом уменьшается число информационных сигналов;
- символы СС вводятся вместе с информационными символами без потерь числа информационных каналов, в этом случае уменьшается длительность кодовой комбинации Тк и символы Тт (увеличивается fт);
- СС специально не формируется, а на приемной стороне состояние синхронизации обнаруживается, исходя из особенностей статистики входного сигнала. Например, если ввести избыточность в сигнал (дополнительные проверочные символы), то верность приема будет высокой только при условии факта синхронизма.
Различные варианты систем синхронизации могут оценить коэффициенты синхронизации:
Кэф.с=Nинф/(Nинф+Nсс),
где Nинф – количество информационных символов за цикл;
Ncc – число символов в сигнале синхронизации за цикл.
При увеличении дополнительных символов, требуемых для передачи СС, коэффициент эффективности уменьшается. Объем СС должен быть, по возможности, минимальным, чтобы обеспечить Кэф.с ® 1 при заданном tвх.с. Однако при этом надо учесть: tвх.с. уменьшается только при увеличении числа импульсов СС за цикл.
Основные параметры систем синхронизации:
а) время вхождения в синхронизм tвх.с.
б) время поддержания синхронизма tп.с.
Классификация синхросигналов 1) по числу символов в кодовой комбинации СС (односимвольные и многосимвольные); 2) по распределению символов СС в цикле передачи (сосредоточенные СС и рассредоточенные синхрогруппы); 3) по структуре синхрогруппы. (структура синхрогруппы состоит из символов 0,1).
Предъявляемые требования к ним:
1) простота формирования СС;
2) высокая защищенность от внешних помех;
3) структура, похожая на СС, должна сравнительно редко встречаться при передаче случайного информационного сигнала.
4 Лекция №4. Одно и двухнаправленные системы передачи
Цель лекции: изучение принципа действия канала одностороннего действия.
Содержание лекции: рассматривается принцип работы канала одностороннего действия, принцип работы развязывающего устройства, т.е дифференциальной системы.
В системах связи (особенно телефонной) наиболее часто возникает необходимость одновременной передачи сигналов между абонентами в обоих направлениях, т.е. канал связи должен быть двустороннего действия. Такая связь называется дуплексной и может быть обеспечена по четырехпроводной линии. По одной паре проводников (или по одному коаксиальному кабелю) осуществляется передача в одном направлении, а по другой – в обратном. Каждая пара образует канал одностороннего действия. С увеличением расстояния растут потери в линии. Для компенсации потерь и коррекции фазочастотных искажений сигнала через определенные расстояния в линию включаются линейные усилители. Усиление в усилителях происходит только в одном направлении – с входа на выход. Поэтому сигналы на передачу и на прием необходимо усиливать отдельными усилителями. Таким образом, четырехпроводная система связи образуется из двух каналов одностороннего действия, как это показано на рисунке 9. Окончание этого канала называют четырехпроводным окончанием канала ТЧ. Дуплексную связь можно осуществить и по одной паре проводников на сравнительно небольшие расстояния, на которых потери еще невелики. Именно такая двухпроводная абонентская линия подведена к обычным телефонным аппаратам. Для выделения из двухпроводной линии сигналов противоположных направлений используется так называемое развязывающее устройство (РУ). С помощью РУ осуществляется подключение двухпроводного окончания к четырехпроводному (см. рисунок 11).
 |
Рисунок 11- Структурная схема канала двустороннего действия
с двухпроводным окончанием
РУ обычно строится на основе мостовой схемы с использованием дифференциального трансформатора, а в простейших случаях на сопротивлениях. Такое устройство еще называют дифференциальной системой (ДС). Основное назначение РУ – обеспечить передачу сигнала в направлении клемм от 1-1 к 3-3 с малыми потерями и прием сигнала с клемм 4-4 к 1-1. В направлении от 3-3 к 4-4 (и наоборот) – должно обеспечиваться большое затухание для ослабления действия линий одностороннего действия друг на друга. В сбалансированной системе падение напряжения на клеммах 1-1 (сюда входит сопротивление абонентской линии совместно с сопротивлением оборудования пользователя) равно падению напряжения на балансном сопротивлении. Условием баланса развязывающего устройства будет: I1*ZАЛ=I2*Zб. Так как в индуктивностях L1 и L2 токи протекают в противоположных направлениях, то напряжение U4-3, наводимое ими в индуктивности L3, определяется разностью напряжений на индуктивностях L1 и L2. В идеальном случае сигнал с клемм 4-4 не должен проникать в канал передачи на клеммы 3-3, т.е. напряжение U4-3 должно быть равным нулю.
 |
Рисунок 12- Схемы включения дифференциальных трансформаторов
Рассмотрим подробнее работу мостовой схемы с дифференциальным трансформатором.
 |
|
|||
Рисунок 13- Мостовая схема дифференциальной системы.
Через РУ сигнал должен проходить в направлениях от клемм 1-1 к клеммам 3-3 и от клемм 4-4 к клеммам 1-1. Затухания в этих направлениях:
a4-1=a1-4=10lgP4/P1=10lg(1+m)/m
a4-2=a2-4=10lgP4/P2=10 lg(1+m)
a4-3=a3-4=10lgP4/P3.
При идеальном согласовании сигнал с клемм 4-4 на клеммы 3-3 не передается и P3=0. В этом случае a4-3=a3-4=¥. На практике в широком диапазоне частот обеспечить согласование и баланс плеч моста не удается и всегда есть влияние между клеммами 3и 4, т.е. a4-3=a3-4¹ ¥. Для улучшения балансировки при удаленных абонентах 2-х проводных окончаний используют так называемые удлинители, вносящие необходимое затухание и согласование сопротивлений.
Конечная величина затухания a4-3 приводит к тому, что часть сигнала из передающей пары проводников переходит в приемные проводники ( действие на ближнем конце) (рисунок 14). Причем, это влияние при плохой балансировке РУ может быть значительно больше, чем помех, наводимых из пары в пару за счет линейных переходов. При больших расстояниях в линии могут использоваться несколько усилительных пунктов, где тоже могут быть развязывающие устройства. Их неполная балансировка тоже добавит переходные помехи. Неполное согласование РУ на дальнем конце (у абонента Б) приводит к тому, что часть сигнала, пришедшего от абонента А, проходит в канал на передачу от абонента Б. Эта часть вновь возвращается к абоненту А. Таким образом, возникает замкнутая петля связи (петлевое усиление). При наличии нескольких усилительных пунктов возникает несколько замкнутых петель.
|
|
Рисунок 14- Петлевое усиления сигналов
Такую систему можно рассматривать как систему усиления с обратной связью (в нашем случае паразитной). Одно (любое) направление можно принять за направление усиления с усилением К1, а другое, как цепь обратной связи с коэффициентом передачи Кос.
Тогда в направлении усиления (например от абонента А к абоненту Б) можно записать
Кус= К1 / 1-Т,
где Т=10 0,05 (К1+К2-a3-4-a4-3 ) e j j - петлевое усиление. Из теории усилителей с обратной связью известно, что из-за частотной зависимости T= f (w ), а также коэффициентов усиления К1 ; К2 и затуханий a4-3; a3-4 в знаменателе знак может меняться и модуль Кус будет также зависеть от частоты. График модуля принимает волнообразный характер.
 |
Рисунок 15- График модуля
DК=| К1 – Кус | = 20 lg[ 1 – 10 –0,05 Xуст e jj ],
где Xуст = (а4-3 + а3-4 ) – (К1+К2) – запас устойчивости системы. По абсолютной величине запас устойчивости должен быть выше некоторого порогового уровня Хпор . Эта величина в системах передачи рассчитывается и проверяется в процессе эксплуатации. Значение Хпор обычно не менее 40 дБ. Запас устойчивости необходим для предотвращения возможного самовозбуждения в системе. Для увеличения запаса устойчивости специально вводят пассивные или автоматически подключаемые ослабители- аттенюаторы (dB) в разных местах системы. Места их подключения зависят от конкретных условий согласования тракта. Другим неприятным следствием переходного влияния является появление «эхо – сигнала». Например, сигнал от говорящего абонента А (ближний конец) проходит по линии и с некоторым затуханием передается на дальнем конце В из точек 3-3 в точки 4-4 (за счет конечной величины а3-4). Сигнал хоть и будет ослаблен, но он может быть вполне достаточным, чтобы, пройдя по обратной линии, быть услышанным самим говорящим. Это будет «первое эхо» говорящего. За счет конечной развязки РУ на ближнем конце часть эхо-сигнала вновь попадет в канал передачи и через время распространения по каналу будет вновь услышан на дальнем конце. Это «первое эхо слушающего». Таких, постепенно угасающих эхо - сигналов, в плохо сбалансированной системе может быть слышно не один раз. Это сильно ухудшает разборчивость речи и психологически мешает вести переговоры. Из практики, если задержка эхо - сигнала (туда-обратно) не превышает 30 мс, а уровень эха мал, то влияние эхо - сигнала пренебрежимо. Если задержка выше, то приходится применять специальные эхозаградители. Они подключатся в разговорный тракт автоматически, если пойдет эхо - сигнал от слушающего абонента к передающему. Но если слушающий вдруг заговорит, то заградитель может не успевать отключиться и часть слова будет «обрезано». В этом недостаток применения эхозаградителей.
Для лучшего согласования РУ с абонентской стороны в двупроводном окончании могут устанавливаться дополнительные резистивные аттенюаторы, называемые транзитные (или телефонные) удлинители.
Для устойчивой работы системы необходимо выполнять условия как по согласованию РУ, так и условия по уровням ослаблений и усилений сигнала. Уровни входных и выходных сигналов в 2-х проводных и 4-х проводных окончаниях нормируются. Обычно за 0 Дб принимается уровень передаваемого сигнала на выходе 2-х проводного окончания.
5 Лекция № 5 Шумы в линии передачи. Расчёт длины усилительного участка
Цель лекции: ознакомление с линией передачи и шумами которые передаются непосредственно по линии связи.
Содержание лекции: изучение передачи сигналов по линии связи и умение произвести расчет по усилительным участкам регенерации участка.
Из всего многообразия шумов, действующих в линиях передачи, основное внимание должно быть уделено собственным тепловым шумам, нелинейным шумам и шумам линейных переходов. По своему действию они создают так называемые совпадающие и несовпадающие помехи.
Совпадающие помехи в ТЛФ тракте создают внятные переходные разговоры. Эти переходные разговоры порождаются за счёт линейных переходов на передающем и приёмном концах усилительных участков за счёт конечной балансировки развязывающих устройств, по цепям питания и за счёт электромагнитных наводок внутри кабеля от соседних проводников. Внятные переходные помехи психологически очень мешают. На них норма по защищённости не менее 60 дБ.
Несовпадающие помехи – 50 дБ-защищённость. Наибольшее значение уровней помех при полной загрузке тракта.
Допустимые соотношения: РСОВП : РНЕСОВ : РЛИН.ПЕР = 1 : 1 : 2 – для симметричного кабеля; 1 : 1 Х – для коаксиального кабеля.
При расчёте шумовых характеристик линий передач в качестве нормированного эталона используют характеристики эквивалентной гипотетической цепи (ЭГЦ). Для ЭГЦ эти параметры записаны в нормативных документах МСЭ-Т.
Например, для ТЛФ каналов протяжённость магистральной
ЭГЦ LЭ=2500 км
(для международной LЭ=25000
км) со вполне оговоренными количествами переприёмов по различным иерархическим
группам nПГ ; nВГ ; nТГ; nЧГ. Для такой ЭГЦ средняя за час псофометрическая
мощность помехи WЭ£10000 пВт или ![]() пВт / 1 км (для
международных
пВт / 1 км (для
международных ![]() пВт).
пВт).
Расчёт длины усилительного участка. Пусть собственные тепловые шумы всей проектируемой
линии для реальных усилителей и реальных кабелей ![]() . Тогда для одного участка при равномерном
распределении участков (что и делается на практике):
. Тогда для одного участка при равномерном
распределении участков (что и делается на практике):
![]() , или, если взять
каждый вид шума в дБ:
, или, если взять
каждый вид шума в дБ:
![]()
Затухание одного линейного участка
![]()
Если Z @ LЭ, то ![]()
Зная уровень передачи рПЕР дБ, получим уровень сигнала, принимаемого на входе каждого усилителя:
![]()
Здесь Рпер и Рвх – допустимые уровни для группового сигнала
Уровень общей мощности сигнал + помеха:
(*)
![]()
Из этого уравнения находят допустимое значение n.
Тогда длина усилительного участка: ![]() .
.
Из формулы (*) также видно, что при выбранном типе усилителей, т. е. ААП – известно, уровень РШ1+РВХ будет наибольшим, когда функция
![]() будет минимальной y=ymin при n=0.23aLЭ и тогда
будет минимальной y=ymin при n=0.23aLЭ и тогда
![]()
Мощности различных видов шумов определяются по следующим формулам: мощность собственных шумов (тепловые шумы линии, элементов схем, флуктуации электропроводности, дробовые шумы электронных приборов и т. п.)
Ко входу каждого из n усилителей магистрали подводится тепловой шум линии Р ШТ [дБ]=10lg kTDS и собственный шум, пересчитанный ко входу одного усилителя dШ .
![]() ,
,
где dШ - логарифмический коэффициент шума;
FШ – коэффициент шума усилителя.
РШ ВХ = РШТ лин + dШ
Если усилителей n штук, то:
РSШ = Р + dШ + 10 lg n.
Последнее слагаемое здесь учитывает накопление шумов. Увеличивать длину l усилительного участка по сравнению с нормами МСЭ-Т можно, либо увеличивая мощность полезного сигнала, но не допуская увеличения нелинейных шумов, уменьшая собственные шумы усилителей – новая элементная база, новые схемные решения, или производя коррекции и предыскажения сигнала. Правда, в общем выигрыш не очень большой, но на многих тысячах километров немалый. Для широкополосного группового сигнала различие между верхними и нижними частотами спектра довольно значительное. Верхние частоты больше подвержены влиянию шумов. Поэтому, вводя предыскажение на половине длины линии, повышают мощность ВЧ составляющих за счёт некоторого снижения мощности НЧ составляющих. В целом, качество всех каналов несколько улучшается.
Мощность от электромагнитных линейных переходов между проводниками.
![]() ,
,
где n – число усилительных участков;
m – число активно влияющих пар;
А1 – защищённость на дальнем конце для 20% комбинаций влияющих пар;
А2 - --------« »---------- для 80% --------« »---------- ;
РСР – уровень долговременной средней мощности сигнала;
А – затухание усилительного участка.
Мощность нелинейных помех
![]() ,
,
где ![]() и F – ширина
спектра одного канала и всей группы.
и F – ширина
спектра одного канала и всей группы.
![]() - нормированная частота;
- нормированная частота;
f1 и f2 – нижняя и верхняя частоты, f – текущая частота;
y 2(s);y 31(s);y 32(s) – коэффициенты спектрального распределения продуктов нелинейности второго и третьего порядка первого и второго рода.
А2ГО(s),А3ГО(s) – затухание нелинейностей второго и третьего порядков;
WМС – долговременная мощность многоканального сигнала на выходе усилителя при работе без предискажений.
Учёт нелинейных искажений носит весьма сложный и трудоёмкий характер. В первом случае для отдельного усилителя известна мощность собственных помех, приведённая ко входу усилителя. Обычно берут псофометрическую мощность. РШ S ПС – допустимая псофометрическая мощность шума всего тракта. Тогда на входе одного усилителя:
![]() ,
,
где РШ S - не взвешенная суммарная мощность помех;
k п = 0.75 – псофометрический коэффициент.
Уровень мощности шумов, приведённых ко входу усилителя
(в децибелах): ![]()
Помехозащищённость (превышение мощности сигнала над мощностью шумов) от собственных помех на входе усилителя:
![]()
Затухание a для конкретной линии берётся для худшего случая, т.е. для верхних частот спектра сигнала.
Чтобы определять степень загрузки каналов и оценивать соотношение сигнал/шум на входах усилителей, нужно учитывать характерные особенности телефонных (ТЛФ) или иных сигналов и выставлять необходимые уровни, не перегружающие усилители.
Для разговорного ТЛФ-го канала (канал ТЧ) уровень средней мощности (в дБ) РКО, а при числе каналов ³240
(*) Р МСО = РКО + 10 lg N т.е. сумма дБ-ов
при N ≤ 240 ![]() (**)
(**)
Значение РКО для одного канала имеет национальные особенности.
По рекомендациям МСЭ-Т в Европе РКО = - 15 дБм0 (32 мкВт)
В США РКО = - 16 дБм0 (25 мкВт)
Для линий с малым числом каналов качество передачи не совсем удовлетворительное. Поэтому используют уровни РКО = - 13 дБм0 (50 мкВт) в линиях с N ≤ 2000, что выше, чем в рекомендациях МСЭ-Т.
6 Лекция №6 Системы передачи с временным разделением каналов
Цель лекции: изучение принципов построения системы передачи с временным разделением каналов (ВРК).
Содержание лекции: ознакомление с системой ВРК, ознакомление с принципом работы схемы, способы передачи сигналов, область их применения.
В системах передачи с ВРК используются цифровые сигналы, представляющие собой ту или иную импульсную кодовую последовательность, т.е. это система для передачи цифровых данных.
Напомним, что для преобразования аналогового сигнала в цифровой используются три операции ДИСКРЕТИЗАЦИЯ, КВАНТОВАНИЕ, КОДИРОВАНИЕ.
Дискретизация осуществляется на основе теоремы
Котельникова. Для сигналов ТЧ с полосой 0,3 – 3,4 кГц + 0,9 кГц (защитный
интервал), т.е. fв = 4 кГц. Тактовая частота дискретизации fт
= 2fв = 8 кГц. Каждый отсчёт передаётся 8 битами, значит сигнал
ТЧ можно передавать со скоростью fт × 8 бит =
8×103 ×8 = 64 кбит/с. Это и есть скорость передачи одного канала
ТЧ. Отсчёты передаются в виде восьмиразрядных двоичных чисел, получаемых при
квантовании отсчётов. Т.к. квантование имеет конечное число уровней, да ещё
ограничения по max и min, то очевидно, что квантованный сигнал не является
точным. Разница между истинным значением отсчёта и его квантованным значением –
это шум квантования. Значение шума квантования зависит от количества уровней
квантования, скорости изменения сигнала и от способа выбора шага квантования. Мощность
шума квантования можно определить следующим образом. Пусть плотность
распределения мгновенных значений отсчётов w(а). При достаточно большом числе уровней квантования М (малый шаг
квантования), можно считать, что в пределах i – го шага w(а) равномерна (постоянна), т.е. имеет вид ![]() с
шириной d и высотой w(аi).
Тогда для i – го участка дисперсия шума квантования:
с
шириной d и высотой w(аi).
Тогда для i – го участка дисперсия шума квантования:
![]() = { т.к. w(аi) в пределах шага постоянна, т.е. не зависит от а } =
= { т.к. w(аi) в пределах шага постоянна, т.е. не зависит от а } = ![]() ,
где
,
где ![]() -
вероятность попадания сигнала в i-ю зону квантования.
-
вероятность попадания сигнала в i-ю зону квантования.
Суммарная дисперсия для всех М зон:
![]() ;
;
В простейшем случае при РАВНОМЕРНОМ шаге квантования,
когда все шаги di
одинаковы, а полная вероятность ![]() , получим
, получим ![]() , т.е. зависит лишь от шага квантования и
не зависит от уровня сигнала.
, т.е. зависит лишь от шага квантования и
не зависит от уровня сигнала.
При заданном динамическом диапазоне сигнала величина шага d однозначно определяет необходимое число уровней квантования М
![]() .
.
Средняя мощность шумов ограничения. Любое квантующее устройство имеет ограничения по амплитуде входного сигнала. При превышении сигналом этого порога значение квантованного сигнала не будет соответствовать реальному сигналу, т.е. будут ошибки.
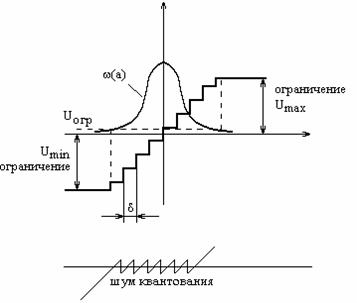
Рисунок 16- Равномерный шаг квантования
Плотность распределения мгновенных значений квантуемого сигнала – чётная функция от своего аргумента (а). Средняя мощность шума ограничения:

При гауссовом законе распределения мгновенных значений (а) можно получить:
(*)  ,
,
где  - интеграл вероятностей (имеются в
справочных таблицах); Uд –
действующее значение напряжения сигнала.
- интеграл вероятностей (имеются в
справочных таблицах); Uд –
действующее значение напряжения сигнала.
Имеет место сильная зависимость РШ ОГР от уровня сигнала, точнее от соотношения х= РОГР / РС. Например, уменьшение мощности сигнала вдвое приводит к уменьшению мощности РШ ОГР более чем в 4000 раз. Значит, в многоканальных СП уровень квантуемых сигналов должен быть мал по сравнению с UОГР для всех компонентных каналов. В режиме «молчания» из-за изменения квантующей характеристики (влияние температуры, питания, характеристик элементов) даже небольшие шумы на входе приведут к появлению квантованного сигнала, что тоже будет шумом.
|

Рисунок 17- График зависимости уровень сигнала от уровня шума
При линейной характеристике квантователя и равномерном шуме динамический диапазон – узкий.
7 Лекция №7. А и m законы квантования
Цель лекции: изучение законов квантования и их применения.
Содержания лекции: ознакомление с законами квантования, область применения, основные отличия между ними.
При равномерном шаге квантования помехозащищённость сигнала от помех будет существенно разной для отсчётов сигнала с малой амплитудой и с большой. Дело в том, что при равномерном шаге квантования шумы квантования будут одинаковыми и для малых, и для больших уровней сигнала. А значит, отношение РС / РШ для малых сигналов может оказаться “плохим”. Можно было бы увеличить число уровней квантования, например, более 8 бит на выборку, но тогда придётся увеличивать скорость передачи, и возрастает вероятность ошибки (с ростом М).
![]() Помехозащищенность в телефонном канале для обеспечения
высокого качества связи должна быть Аз=Рс / Рш=32,5
дБ. При постоянстве помехозащищенности шаг квантования определяется
мгновенными значениями сигнала di = uвхÖ 12*10-0,05Аз .
Помехозащищенность в телефонном канале для обеспечения
высокого качества связи должна быть Аз=Рс / Рш=32,5
дБ. При постоянстве помехозащищенности шаг квантования определяется
мгновенными значениями сигнала di = uвхÖ 12*10-0,05Аз .
Для улучшения ситуации на практике используют методы нелинейного двоичного кодирования (нелинейная кодификация). Эти методы основаны на принципах компандерного расширения динамического диапазона сигнала. Входной сигнал сжимается с помощью компрессора до уровня, приемлемого для передачи по данному каналу связи, а на выходе (приёмной стороне) канала сигнал с помощью эспандера вновь восстанавливается. При этом слабые сигналы остаются почти без изменения, а сигналы большого уровня «поджимаются». Тем самым быстрота нарастания / убывания сигналов малого и большого уровней как бы сравниваются, и тогда число уровней становится почти одинаковым. Наиболее хорошо подходят для компандирования / экспандирования законы типа ехр(х) и ln(x) соответственно.
Наиболее широко используются стандартизованные законы (для симметричного двухполярного входного сигнала).
А - закон:
у=sgn (x)[z(x)/(1+lnA)],
где А = 87,6; х=uвх/Uогр; z=A×½x½; для 0 £ х £ 1/А
или z=1+ln½x½, для (1/А) £ х £ 1.
Этот закон используется в Европейских системах ИКМ.
Для А – закона минимальный шаг квантования 2 / 4096 =
1 / 2048, точнее ![]() .
.
m - закон – используется в Американских системах ИКМ (D1 с m = 100 и D2 с m = 255).
![]()
Для m - закона минимальный шаг квантования 2 / 8159.
Иногда эти законы записывают так:

Введение нелинейного квантования позволяет при той же помехозащищённости уменьшить в 1,5 раза число необходимых разрядов (используют по 8 разрядов) по сравнению с линейным законом, а значит, в 1,5 раза снижается полоса необходимых частот.
![]() ; N
– число каналов.
; N
– число каналов.
Для малых уровней сигнала ½x½ < 1/А
квантование носит равномерный характер с шагом ![]() и мощность шума постоянна (т.к. шаг
равномерный). Для сигналов ½x½ > 1/А квантование логарифмическое и Рш
пропорциональна Рс .
и мощность шума постоянна (т.к. шаг
равномерный). Для сигналов ½x½ > 1/А квантование логарифмическое и Рш
пропорциональна Рс .
Отметим, что отношение ![]() для А – закона носит более равномерный
характер в пределах динамического диапазона сигнала, чем при m-законе. На практике характеристики А или m законов выполнить чисто логарифмически сложно. Поэтому их выполняют в
виде линейно – ломаных кривых, составленных из сегментов для положительных и отрицательных
значений сигнала (см. рисунок 14). Это существенно упрощает техническую
реализацию компандера и экспандера. Вершины сегментов совпадают с
логарифмической кривой, а по вертикали все приращения Dy кривой
одинаковы. В m - законе используют 15 сегментов (8 для
положительного сигнала и 8 для отрицательного сигнала). Если первые (от нуля)
сегменты для положительного и отрицательного сигнала имеют одинаковый наклон,
то они будут как бы одним «длинным» сегментом, и тогда получается 15 сегментов.
Для А – закона компандирования по 8 сегментов для положительного и отрицательного
сигнала, из которых возле нуля по два сегмента каждой, полярности общие. В
результате получается 13 сегментов. Если Uмах сигнала принять за 1, то первый сегмент
занимает по оси х 1/128, следующий 1/64, затем 1/16, 1/4, 1/2. Международное
соединение может быть длиной до 27500 км. При проектировании цифровых
трактов обычно стремятся обеспечить Рош = 10-6. При
протяжённых трактах, например, международных (длиной до 27500 км) на различных
участках требования к Рош разные, чтобы в целом обеспечить не хуже
10-6.
для А – закона носит более равномерный
характер в пределах динамического диапазона сигнала, чем при m-законе. На практике характеристики А или m законов выполнить чисто логарифмически сложно. Поэтому их выполняют в
виде линейно – ломаных кривых, составленных из сегментов для положительных и отрицательных
значений сигнала (см. рисунок 14). Это существенно упрощает техническую
реализацию компандера и экспандера. Вершины сегментов совпадают с
логарифмической кривой, а по вертикали все приращения Dy кривой
одинаковы. В m - законе используют 15 сегментов (8 для
положительного сигнала и 8 для отрицательного сигнала). Если первые (от нуля)
сегменты для положительного и отрицательного сигнала имеют одинаковый наклон,
то они будут как бы одним «длинным» сегментом, и тогда получается 15 сегментов.
Для А – закона компандирования по 8 сегментов для положительного и отрицательного
сигнала, из которых возле нуля по два сегмента каждой, полярности общие. В
результате получается 13 сегментов. Если Uмах сигнала принять за 1, то первый сегмент
занимает по оси х 1/128, следующий 1/64, затем 1/16, 1/4, 1/2. Международное
соединение может быть длиной до 27500 км. При проектировании цифровых
трактов обычно стремятся обеспечить Рош = 10-6. При
протяжённых трактах, например, международных (длиной до 27500 км) на различных
участках требования к Рош разные, чтобы в целом обеспечить не хуже
10-6.
Рисунок 18- Ломанная кривая для А – закона компандирования
Для слабых сигналов выигрыш от компандирования для m-закона  (m = 255), для А – закона
(m = 255), для А – закона ![]() .
.
Для национальных участков принимают Рош = 0.4×10-6 и равномерно распределяют эту норму по участкам цепи. При этом Рмагистр = Рвн.зон. = Рместн = Рабон = 10-7. Тогда нормированные значения вероятности ошибок в расчёте на 1 км линии будет Рмаг.1 = 10-7 / 10000 = 10-11; Рвз.1 = 10-7 / 600 = 1,07×10-10; Рм.1 = 10-7 / 100 = 10-9. Исходя из этих величин нормированных вероятностей ошибок на 1 км, предъявляются требования к линейным регенераторам на участках цепи. (Рекомендация МСЭ-Т G.821). Эта рекомендация довольно сложным образом регламентирует процесс измерений качества каналов связи. На практике чаще всего пользуются величиной Кош (BER).
В нашей стране по качеству разделяют участки высшего класса (магистральные, 40% ошибок), среднего класса (внутризоновые, 20% ошибок), низшего класса (местн.(7,5%) и абонент.(7,5%)).
Международная градация по рек. G.821 МСЭ-Т А – низш.; Б – средн.; В – высш.
Т а б л и ц а 1.
|
Рош |
Среднее время между двумя ошибками |
|
10-2 |
0,012 с |
|
10-4 |
1,2 с |
|
10-6 |
2 мин |
|
10-8 |
3 часа |
|
10-10 |
14 дней |
|
10-12 |
4 года |
Характеристики m=225/15 сегм. и A=87,6/13 сегм. стандартизированы и рекомендованы МСЭ-Т (Рекомендация G. 711). В международной связи используется m-закон. В Европе и Казахстане - A-закон.
Для упрощения реализации кодера сегментные промежутки, наклон сегментов, внутрисегментные промежутки (кроме 0-1 сегмента) находятся в соотношениях, кратных 2-м. В разных сегментах число уровней квантования различно, но в пределах каждого сегмента - одинаково.
Основные параметры характеристики компрессии по А – закону приведены в таблице 2.
Т а б л и ц а 2.
|
№ сегмента |
Вид кодовой комбинации (P XYZ ABCD) |
Относительный интервал изменения входного сигнала |
Значение шага квантования относительно Uогр |
|
0 |
P 000 ABCD |
0 ¸ 1/128 |
1/2048 |
|
1 |
P 001 ABCD |
1/128 ¸ 1/64 |
1/2048 |
|
2 |
P 010 ABCD |
1/64 ¸ 1/32 |
1/1024 |
|
3 |
P 011 ABCD |
1/32 ¸ 1/16 |
1/512 |
|
4 |
P 100 ABCD |
1/16 ¸ 1/8 |
1/256 |
|
5 |
P 101 ABCD |
1/8 ¸ 1/4 |
1/128 |
|
6 |
P 110 ABCD |
1/4 ¸ 1/2 |
1/64 |
|
7 |
P 111 ABCD |
1/2 ¸ 1 |
1/32 |
Кодовая комбинация и есть код квантованного сигнала
P CUZ ABCD ® P=1- сигнал +
P=0-сигнал -
CUZ - код номера сегмента.
ABCD – цифры обозначающие номер шага квантования внутри сегмента, т. е. натуральный двоичный код номера шага.
Итого на передачу одного отсчёта используется 8 разрядов.
В ЦСП используют и линейное преобразование. Но при этом нужно большее число разрядов. Используют 12 разрядов. Однако, для снижения скорости передачи приходится осуществлять преобразование 12 разрядного кода в 8 – ми разрядный.
Следует отметить, что в процессе кодирования возникают дополнительные погрешности за счет температурных влияний, конечной разрядности и стабильности опорных источников квантователя и т.п., т.е. инструментальные погрешности, которые могут быть до 50% от общей мощности искажений в ЦСП.
8 Лекция №8 Методы ИКМ
Цель лекции: изучение методов передачи ИКМ.
Содержание лекции: струкрурные схемы и принципы работы всех методов модуляции.
Кроме рассмотренных выше методов передачи цифрового сигнала, существуют методы, в которых передаётся не значение отсчёта, а разница между соседними отсчётами дискретного сигнала, т.е. передаётся знак и величина ПРИРАЩЕНИЯ. Эти методы называются ОТНОСИТЕЛЬНЫМИ или ДИФФЕРЕНЦИАЛЬНЫМИ.
Наиболее простым является линейная дельта – модуляция (от слова D-приращение) с постоянным шагом.
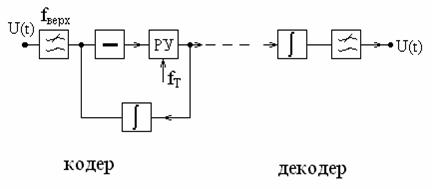
Рисунок 19- Линейная дельта модуляция
На каждом шаге квантования с тактовой частотой на выходе интегратора вырабатывается ступенчато приращение напряжения со знаком + или -. Выбор знака приращения определяется разностным сигналом Uc - Uкв поступающим с вычитателя на вход решающего устройства (РУ). При линейной дельта модуляции величина приращения по модулю одинакова на каждом шаге, т.е. линейная ДМ – это двухуровневое кодирование +1 и –1 один разряд.

Рисунок 20- Диаграмма уровней сигналов
Такой способ модуляции достаточно прост, но его целесообразно применять для сигналов, не имеющих быстрых изменений уровня. При быстром нарастании или убывании сигнала квантованный, ступенчатый сигнал не успевает за изменением сигнала. В результате возникает большая разница Up=Uc- Uкв, что приводит к перегрузке РУ и искажению оцифрованного сигнала. ДИМ с предсказанием ещё называют адаптивной ДИМ. Для групповых многоканальных сигналов общий сигнал более равномерный – “усреднённый”, и в этом случае может быть вполне целесообразным применять линейную дельта – модуляцию. Для восстановления сигнала Uc(t) на приёмном конце достаточно поставить интегратор и ФНЧ. В отличие от других видов квантования, когда работа квантователя имеет ограничения по амплитуде входного сигнала (+Uогр; - Uогр), т.е. сигнал должен иметь заданный динамический диапазон, в ДИМ ограничение не на амплитуду сигнала, а на его приращение (производную) – это принципиальная разница.
В СП с ДИМ разницу Uс – Uкв можно сделать сколь угодно малой, увеличивая число шагов (уменьшая шаг квантования d). Но это требует повышения тактовой частоты и, значит, скорости передачи. Несколько спасает положение то, что каждый последующий отсчет корреляционно связан с предыдущим и ошибка для данного отсчёта уменьшается. Вдобавок, спектральная плотность речевого сигнала на верхних частотах имеет относительно малый вклад и ошибка, вызванная уменьшением частоты дискретизации, меньше влияет. На практике оказалось достаточным иметь fт»150-200 кГц. Ещё более существенного уменьшения fт удаётся достичь в системе ДИМ с предсказанием. В этом случае шаг квантования делают неравномерным. Если скорость изменения сигнала (или огибающей ВЧ сигнала) мала, то квантование можно выполнять реже (увеличить шаг d), т.к. сигнал почти не изменяется за время шага. Это называют компандированием. Различают компандирование по огибающей самого сигнала – инерционное компандирование и по структуре цифрового сигнала на выходе модулятора –мгновенное компандирование. Критерием выбора шага квантования. служит производная сигнала.
Инерционное компандирование применяют при передаче речевого сигнала (слоговое компандирование). Мгновенную ДИМ применяют при передаче сигналов телевидения (TV). Шаг квантования выбирается в соответствии с крутизной передаваемого сигнала. Для этого в цепь обратной связи модулятора и демодулятора вводится схема управления интегратором. При компандировании по структуре цифрового потока управление шагом квантования производится после анализа структуры уже оцифрованного сигнала.
Сигнал с выхода модулятора подаётся на модулятор импульсов (МИ) и на анализатор плотности единиц (АПЕ), включенных в цепь ОС.
Сигнал с выхода интегратора ![]() модулирует амплитуду импульсов
в МИ и с МИ сигнал поступает на
модулирует амплитуду импульсов
в МИ и с МИ сигнал поступает на ![]() , управляя его шагом квантования.
, управляя его шагом квантования.

Рисунок 21- Структурная схема мгновенного ДИМ
Компандирование по цифровому потоку позволяет более точно согласовывать характеристики передающего и приёмного оборудования при перестройке шага квантования даже при “быстрых” изменениях сигнала (широкополосные сигналы). Поэтому этот метод, наряду с методом мгновенного компандирования, применяют при передаче сигналов TV.
9 Лекция №9. Некоторые свойства сигналов АИМ-1 и АИМ-2. Обобщенная структурная схема оконечной цифровой станции
Цель лекции: ознакомление со свойствами АИМ-1 и АИМ-2, изучение схемы цифровой оконечной станции.
Содержание лекции: некоторые свойства передачи сигналов двух родов по каналу.
Напомним, что в системах с ЧРК аналоговый сигнал модулирует колебания несущих частот. После модуляции с помощью фильтров выделяют из спектра АМ сигналов одну боковую полосу (сигналы с ОБП). Каждая боковая полоса имеет ширину 3,4 кГц – 0,3 кГц = 3,1 кГц + Dfзащитн.=4 кГц. Групповой сигнал занимает ширину спектра частот Nfкан., где N- число каналов, fкан.- ширина спектра одного канала.
Т.е. по линии связи может передаваться столько каналов ТЧ, сколько может уместиться боковых полос в общей полосе пропускания линии связи. На практике из-за взаимного влияния проводов в кабеле и из-за необходимости иметь резерв, число используемых каналов процентов на 30% меньше возможного числа.
В системах с ВРК на каналы делится не спектр передаваемых по линии связи частот, а время. При этом каждый канал в момент передачи занимает весь отведённый групповому сигналу спектр частот. Т.к. ширина спектра сигнала обратно пропорциональна длительности импульсного сигнала, то длительность импульсов цифрового сигнала (т.е. скорость передачи) напрямую зависит от ширины частот, передаваемых линией связи.
К настоящему времени сложилась ситуация, когда имеется большое (у нас преобладающее) число каналов связи, предназначенных для передачи аналоговых сигналов с системами ЧРК. В то же время уже имеется значительное число трактов, созданных специально для передачи цифровых сигналов. Поэтому часто возникают ситуации, когда на всём протяжении от абонента к абоненту или на отдельных участках канала связи необходимо передавать аналоговые сигналы по цифровым каналам, и наоборот, цифровые сигналы по аналоговым трактам.
При передаче группового аналогового сигнала по цифровому каналу, групповой сигнал подвергают дискретизации. Представляет интерес сравнить полосы частот, занимаемых сигналом в системах с ЧРК и ВРК при различных видах модуляции.
Итак, каждый ТЛФ канал имеет полосу ½0,3-3,4½=3,1кГц + защитная полоса итого 4кГц. При амплитудной модуляции в системах с ЧРК с помощью фильтров выделяют после смесителей одну боковую полосу (ОБП) шириной также Dfтч=4кГц, но уже в области несущей частоты. Таким образом, N-канальный сигнал в системах с ЧРК ОБП имеет общую ширину спектра Dfчрк=NDfтч.
В системах с ВРК наиболее широко применяют дискретизированные АИМ и цифровые кодированные ИКМ сигналы.
Сигналы с АИМ различают двух родов АИМ-1 и АИМ-2. При дискретизации с помощью импульсов прямоугольной формы различие АИМ-1 и 2 можно видеть из рисунков.
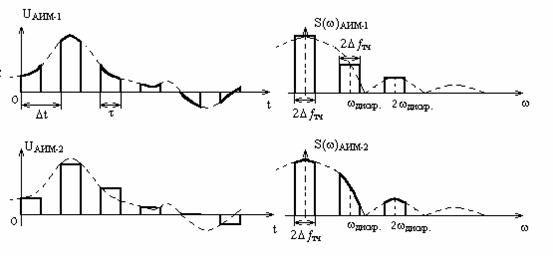
Рисунок 22- АИМ-1 и АИМ-2
Т.е. мгновенное значение АИМ-1 на верхушках импульсов повторяет мгновенное значение сигнала, а его спектр, напротив, постоянен в области частот wд; 2wд и т. д.
Сигнал с АИМ-2 имеет постоянную
амплитуду импульсов дискретизации, равную мгновенному значению сигнала в точке
отсчёта. А его спектр, напротив, имеет частотную зависимость по закону ![]() в области частот nwд.
в области частот nwд.
![]()
где ![]() - спектральная плотность исходного
аналогового сигнала.
- спектральная плотность исходного
аналогового сигнала.
![]() - спектральная плотность импульсов
дискретизации.
- спектральная плотность импульсов
дискретизации.
Полезная часть общего спектра
![]()
Для АИМ-2

Здесь  -
зависит от частоты.
-
зависит от частоты.
Значит, при наличии шумов в канале, сигналы с АИМ-2 будут иметь амплитудно – частотные искажения, а сигналы с АИМ-1 будут подвержены искажениям амплитуды сигнала.
Из рисунков видно, что одним из способов уменьшения амплитудных и амплитудно-частотных искажений является уменьшение длительности t стробирующих импульсов, что и делается на практике. Тогда разница между АИМ-1 и АИМ-2 делается несущественной. Но при t®0 уменьшается доля мощности полезной составляющей в спектре сигнала как АИМ-1, так и АИМ-2, что ухудшает помехозащищённость. В реальных СП с ВРК при t®0 после выделения отсчётов на стороне приёма их удлиняют (растягивают) для увеличения их энергии. Возникающие при этом амплитудные искажения корректируют корректором с коэффициентом передачи
 где
где ![]() 0<ïwï£wмакс ТЧ.
0<ïwï£wмакс ТЧ.
При дискретизации прямоугольными
импульсами спектр дискретного сигнала бесконечен. Теоретически существует
сигнал вида ![]() имеющий
строго ограниченную ширину спектра. На практике формируют взамен прямоугольного
сигнала - сигналы подобные
имеющий
строго ограниченную ширину спектра. На практике формируют взамен прямоугольного
сигнала - сигналы подобные ![]() . Т.к. такой сигнал точно сформировать
нельзя, то ширина спектра окажется несколько размытой, но вполне приемлемой для
практики. При такой реализации общая ширина спектра группового сигнала
. Т.к. такой сигнал точно сформировать
нельзя, то ширина спектра окажется несколько размытой, но вполне приемлемой для
практики. При такой реализации общая ширина спектра группового сигнала
![]() c
c ![]()
При этом и помехозащищённость
сигналов с ЧРК с ОБП и ВРК с АИМ-1 и АИМ-2 также одинаковы.
Общим для ЧРК и ВРК с АИМ является важный недостаток – накапливание помех в тракте передачи прямо пропорционально протяжённости канала, а это приводит к сильным искажениям аналогового и дискретного сигналов.
Это обстоятельство наиболее просто исправляется в системах с ИКМ, когда дискретные значения сигнала передаются не мгновенными значениями отсчётов, а кодовыми символами, имеющими одинаковые по форме импульсные сигналы. Это позволяет регенераторам полностью восстанавливать кодовую комбинацию в линейных усилителях – регенераторах без необходимости коррекции формы сигнала.
Обобщённая структурная схема цифровой системы преобразования (ЦСП). В системах ЦСП неважно, какой вид имеет первичный сигнал. Всё равно его преобразуют в цифровой.
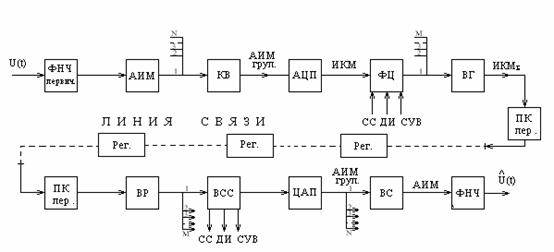 |
Рисунок 23- Обобщенная структурная схема оконечной ЦСП
Исходный (первичный) сигнал ограничивается по спектру ФНЧ, затем подвергается дискретизации (АИМ). Объединив N-первичных дискретизированных, сигналов их подвергают квантованию (КВ) и далее преобразуют в цифровой кодированный сигнал (АЦП). С выхода АЦП получаемый ИКМ сигнал объединяется с необходимыми сигналами сигнализации, сигналами синхронизации (СС), дискретной информации (ДИ) и сигналами управления и взаимодействия (СУВ). В результате объединения их в формирователе цикла (ФЦ) образуется цикл передачи определённой структуры.
Если используются высокоскоростные системы передачи, то полученные цикловые сигналы могут объединяться с подобными же от других каналов, тем самым осуществляется временное группообразование (ВГ) – мультиплексирование. Здесь циклические последовательности от каждого канала выстраиваются в определённом порядке. При мультиплексировании объединяются М относительно низкоскоростных потоков в один, в котором за то же время нужно передать в М раз больше символов. Значит, общий групповой поток будет более скоростным. Мультиплексор должен осуществлять согласование скоростей объединяемых потоков, а они могут быть не совсем одинаковыми, т.к. получены от разных источников, аппаратуры, линии связи. Из-за неполного согласования низкоскоростных составляющих возникают их сдвиги во времени относительно друг друга, что приводит к фазовому дрожанию цифрового сигнала и даже возможна ситуация потери моментов начала каждого цикла, т.е. потеря синхронизации. Поэтому вопросам синхронизации в ЦСП уделяют особое внимание. Последним звеном на передающей стороне служит устройство преобразователя кода (ПК), преобразующее ИКМ сигнал в кодовую комбинацию, наиболее оптимальную для данного вида линии связи. В промежуточных пунктах цифрового линейного тракта осуществляется регенерация (Рег) цифрового сигнала.
На приёме ПК производит обратное преобразование линейного кода в двоичный групповой сигнал. Устройство временного разделения (ВР) – демультиплексор разделяет высокоскоростной поток на низкоскоростные компоненты, из которых в блоке выделения служебных сигналов (ВСС) выделяются сигналы синхронизации, управления и взаимодействия. Из АИМ групп после цифро-аналогового преобразования (ЦАП) с помощью временного селектора (ВС) выделяются индивидуальные канальные сигналы АИМ. Сам сигнал восстанавливаются из АИМ с помощью ФНЧ.
Рассмотрим принципиальные трудности, приводящие к ухудшению качества передачи и появлению ошибок. За счёт взаимной несинхронизированности исходных низкоскоростных ИКМ сигналов не бывает стабильным их взаимное временное положение, что, как уже говорилось выше, приводит к фазовым искажениям (дрожанию-джиттеру сигнала). Для выравнивания скоростей поступающих компонентных сигналов (в виде циклового фрагмента), в мультиплексоре используют буфера-регистры.
В линейном тракте качество передачи и ошибки могут появиться как за счёт искажения формы сигнала в линии, так и за счёт различных наводок. При этом могут возникать ошибочные символы, приводящие к появлению ошибочного “0” или “1” в цикле, что может изменить всю временную структуру группового сигнала. Частота появления ошибочных символов в линейном тракте с регенераторами обычно не велика, но имеется всегда. Эти искажения появляются на слух в виде щелчков, а в цифровой аппаратуре (например, в компьютере) приводит к ошибкам в информации.
Передающая сторона передаёт биты с определённой тактовой частотой. Для выделения этой частоты на приёмной стороне и на регенераторах в каждом цикле есть определённые ( по месту во времени) слоты синхронизации. Но аппаратная нестабильность и нестабильность (например, температурная) физических линий связи, приводят также к джиттеру сигналов синхронизации. Из-за этого тактовоя частота на приёмной стороне несколько отличается от передаваемой, что тоже приводит к искажению восстанавливаемого сигнала.
На приёме при обратном преобразовании линейного
кодового сигнала в ИКМ - сигнал любая ошибка позволяет размножение их в ИКМ-
сигнале с коэффициентом ![]() , где Р - вероятности.
, где Р - вероятности.
В процессе временного разделения (ВР) –демультеплексирования в случае ошибочного приёма команд согласования скоростей цикловых фрагментов (компонентных сигналов) может произойти потеря синхронизации, что приведёт к невозможности расставить компонентные сигналы во времени по своим местам, т.е. произойдёт нарушение связи по всем каналам компонентных потоков. Для устранения этого явления разработаны специальные кодовые комбинации и специальные устройства отслеживания синхронизации, которые при потере синхронизации за минимально возможное время (обычно, это мс) восстанавливают синхронизацию. Но всё равно происходит сбой и ошибки. Сигналы синхронизации и управления выделяются блоком ВСС.
В ЦАП возникают свои искажения-формы сигнала. Возникновение ошибок и искажений в ЦСП можно разделить на два больших класса:
а) искажения, возникающие в оконечной аппаратуре в процессе дискретизации, квантования, кодирования и согласования скоростей;
б) искажения, появляющиеся в линейном тракте в процессе регенерации (случайные ошибки, джитт).
10 Лекция №10. Формирование структуры цикла передачи ЦСП
Цель лекции: изучение формирование структуры цикла передачи цифровых сигналов.
Содержание лекции: основные моменты формирования сигналов и их передачи по каналу ЦСП.
В процессе группообразования информации от каждого низкоскоростного канала поочерёдно встраиваются по оси времени в общий высокоскоростной поток, т.е. происходит поочерёдная циклическая передача состояния информационных символов от каждого канала. Структура каждого цикла (ФРЕЙМА) строго определена. Длительность цикла 125 мкс (соотве6тствует частоте дискретизации 8 кГц). Весь цикл разбивается на определённое число канальных интервалов – таймслотов. Для каждого из N объединяемых каналов выделяется канальный интервал КИ (таймслот), в котором будет передаваться кодовая группа состояния данного канала на момент передачи. Дополнительно к информационным канальным сигналам в цикл вводятся символы синхронизации, команды согласования; а также сигналы контроля и управления – так называемые СЛУЖЕБНЫЕ сигналы. Причём, служебные сигналы вводятся как общие для всех каналов (синхронизация, телеконтроль, команды согласования), так и при необходимости для каждого канала. Из-за необходимости введения дополнительных, но НЕОБХОДИМЫХ символов в циклы, возрастает скорость передачи в кб/с за время цикла по сравнению с простой суммой информационных скоростей каналов. Например, 30 каналов имеют скорость по 64 кб/с
30 × 64 = 1920 кб/c.
На эти 30 каналов необходимо за это же время передать дополнительных символов ещё на два канала 2 × 64 = 128 кб/с. Итого в ИКМ-30 получается скорость потока 1920 + 128 = 2048 кб/с, что и составляет скорость первичного группообразования, т.е. в ИКМ-30 передаётся 30 информационных и 2 дополнительных канальных интервалов
Чем выше по иерархии ступень мультиплексирования, тем больше надо дополнительных позиций во фрейме, поэтому скорость передачи групповых сигналов не является простой суммой канальных 64 кб/с скоростей. Итак, в цикле (фрейме) должны быть позиции для сигналов синхронизации, информационных, для передачи сигналов управления, контроля и, возможно, других дополнительных сигналов. Эти обычно полезные сигналы могут быть распределены или побитно, или покодово. При распределении этих позиций по фрейму руководствуются следующими соображениями:
1.Символы синхронизации должны быть хорошо различимыми и должны обеспечивать минимальное время их поиска в случае потери синхронизма. Обычно их формируют в виде сосредоточенной группы сигналов в определённой позиции (слоте) фрейма (цикла).
2. Распределение команд согласования скоростей, управления и т.п. (т.е. сигналов управления и взаимодействия СУВ) должно быть таким, чтобы обеспечивалась их максимальная помехоустойчивость. Их часто равномерно распределяют по циклу, чтобы случайно не получить ложные сигналы от сосредоточенной помехи, но могут их передавать и в виде группы в определённом слоте (канальном интервале).
3. Длительность цикла должна быть минимальной, чтобы обеспечить минимум времени на восстановление синхронизма в случае его потери.
4. Структура цикла должна позволять работать системе как в асинхронном, так и в синхронном режиме.
Исходя из этого, очевидно, что дополнительных позиций (относительно числа информационных) должно быть малым, т.е. любые дополнительные сигналы необходимо передавать как можно меньшим числом разрядов (бит) и как можно меньше занимать слотов. Сигналы управления и взаимодействия для каждого из N каналов могут передаваться реже чем информационные сигналы. Например, в каждом цикле передавать СУВ только поочерёдно для одного канала или поочерёдно в одном цикле для двух каналов сразу. Значит, надо или N циклов, или N/2 циклов для того, чтобы передать СУВ для всех каналов. Такая группа циклов образует СВЕРХЦИКЛ (мультфрейм). В первом цикле СВЕРХЦИКЛА обычно передаётся сигнал СВЕРХЦИКЛОВОЙ синхронизации вместо сигналов СУВ, а СУВ не передаётся. Поэтому в сверхцикле на один цикл больше, чем N или N/2. Такая организация циклов в сверхциклы необходима для организации СУВ всех каналов и правильного распределения этих сигналов на приёме. В различных практических случаях может быть реализован несколько различающийся способ размещения информационных, управляющих и служебных сигналов.
Рассмотрим, например, структуру цикла, применяемую в отечественной аппаратуре ИКМ-30. В этой системе цикл, длительностью 125 мкс делится на 32 одинаковых канальных интервала (слота). Для передачи информации используют 8-разрядный код при частоте дискретизации 8 кГц. В каждом цикле передаются СУВ сразу для двух каналов (N/2). Так как ИКМ-30 мультиплексирует 30 телефонных каналов, то сверхцикл будет N/2 + 1 = 16 циклов. В каждом цикле первый слот отводится для сигналов цикловой синхронизации, а 16-й слот – для передачи сигналов СУВ (сигналы управления, аварийные сигналы, служебные и т.п.) и 30 каналов на передачу информации. Итого 32 КИ в каждом цикле. Нетрудно подсчитать скорость передачи в системе ИКМ-30 в бит/с.
8кГц дискр × 8разр × 32КИ = 2048 кбит/с – скорость первичного уплотнения.
СС циклов. 0011011; отсутств. СС цикл. 1у11111
СС сверхцикл. 0000 – вместо СУВ одного канала.
Рисунок 24- Структура цикла передачи ИКМ – 30
Структура сигналов синхронизации и количество разрядов (позиций) в СС имеют существенное значение для времени удержания системы передачи и приема в состоянии синхронизма и времени восстановления синхронизма после потери его. Кодовая группа СС должна отличаться от кодовых групп других канальных интервалов (КИ). Эта отличимость разная для различных скоростей передачи и различного количества разрядов в КИ. Наиболее удачные кодовые группы для СС удаётся получить на основе понятия критических точек. Критическая точка – это точки повторяемости одинаковых чередований логического «0» и «1». Например, если кодовая группа имеет «d» символов, то:
группа ![]() имеет одну критическую точку. Последняя
«1» перед новым «0».
имеет одну критическую точку. Последняя
«1» перед новым «0».
группа ![]() -
имеет «d» критических точек;
-
имеет «d» критических точек;
группа 0101…01 – имеет b/2 критических точек;
группа 0011011 – одну.
Если во всём цикле примерно <500 тактовых интервалов (позиций), то выгоднее применять коды СС с малым количеством критических точек. При большом количестве ТИ в цикле выгоднее с большим числом критических точек (вплоть до «d» штук). При этом поиск синхросигнала ведётся от цикла к циклу, поэтому при потере СС их ищут в течение нескольких циклов (от 1 до 100 в зависимости от кода СС и количества ТИ в цикле). За это время может неправильно считываться информация.
Слежение за выходом из синхронизма или входе в синхронизм осуществляется с помощью специальных буферных устройств; при несовпадении принятых СС с хранящейся правильной записью принимается решение о потере синхронизма, но какое-то время, пока не разбегутся тактовые частоты принимаемого сигнала и сигналов приёмного устройства. Например, в ИКМ-30 среднее время восстановления СС 2 мс, в ИКМ-120 – 0.75 мс, ИКМ-480 – 0.15 мс. Если вхождение в синхронизм происходит недопустимо долго, то нарушается правильное считывание информации по каналам. Говорят, происходит размножение ошибок, вплоть до полного нарушения приёма по всем каналам. Это один из важнейших недостатков асинхронного объединения каналов. При наличии сверхциклов вначале ищутся СС цикла, а затем сверхцикловые СС. В многоступенчатой иерархии восстановление синхронизма происходит от низших ступеней к высшим.
Основные особенности ИКМ-30-4 1). Сигналы СУВ объединяются в оборудовании согласования межстанционных линий АТС в общий канал сигнализации (ОКС). Этот канал сигнализации имеет стандартный стык обычного канала скорости 64 Кбит/с; 2).Улучшен КПД регенераторов, что позволило почти вдвое увеличить секцию ДП питания и дальность связи в целом. Так для кабелей Т-0,5 вместо
L2 = 25 км и L = 50 км дальность стала L2 = 40 км и L = 80.
При двухкабельном варианте работы на 10 – парном кабеле (например, типа ТПП –0,7) в ИКМ-30-4 на 44% увеличивается длина регенерационного участка (с L1 = 2,7 км до L1 = 3,8 км).
В ИКМ-30-4 имеется унифицированное сервисное оборудование для контроля и управления – центр управления. Дополнительное сервисное оборудование позволяет организовать низкочастотную служебную связь в двух направлениях, межстанционную служебную связь и связь по цифровому каналу со скоростью 32 кбит/с. Причем, последний может быть использован и для передачи сигналов данных – дискретной информации. Функции сервисного оборудования могут быть переданы командой оператора на ЭВМ центра технического обслуживания (ЦТО) АТС.
Имеется также система ИКМ-30с для организации связи по однокабельному варианту на кабелях типа КСПП – 1×4×1,2 или КСПП – 1×4×0,9. Эта система позволяет также иметь выделенный общий канал сигнализации ОКС со скоростью 64 кбит/с и имеется возможность производить выделение части каналов и разделение группового потока на отдельные цифровые каналы по 64 кбит/с каждый.
11Лекция № 11. Иерархия цифровых СП. Способы передачи цифровых сигналов по линии. Синхронизация в цифровых СП с ИКМ
Цель лекции: изучение иерархии цифровых сигналов и педача их по линии. Все виды синхронизации.
Содержание лекции: методы передачи сигналов по линии, а также их синхронизации.
Цифровые СП (системы передачи), используемые на сетях связи, соответствуют определенной иерархической структуре, которая должна учитывать следующие основные требования:
- возможность передачи всех видов аналоговых и дискретных сигналов;
- выбор параметров СП с учетом характеристик существующих и перспективных линий связи;
- возможность достаточно простого объединения, разделения и транзита передаваемых сигналов;
- выбор стандартизированных скоростей передачи с учетом использования оборудования как АЦП, так и временного группо-образования сигналов;
- возможность взаимодействия ЦСП с АСП и различными системами коммутации.
Иерархический принцип построения ЦСП позволяет унифицировать каналообразующее оборудование, упростить процессы изготовления, внедрения и технической эксплуатации соответствующего оборудования, т. е. в целом повысить технико-экономические показатели этих систем.
В настоящее время наибольшее распространение получили два типа иерархий ЦСП: европейская и североамериканская (рисунок 25).
Европейская иерархия основывается на первичной ЦСП типа ИКМ-30, в которой с помощью аналого-цифрового оборудования образуются 30 каналов с пропускной способностью 64 кбит/с каждый (применяется восьмиразрядная компандированная ИКМ). Скорость передачи группового сигнала составляет 2048 кбит/с. При формировании групповых сигналов ЦСП более высокого уровня используется принцип временного объединения (группообразования) цифровых потоков, сформированных в оборудовании ЦСП более низкого уровня. Как видно из рис. 7.21, а, коэффициент объединения для всех ступеней иерархии принят равным четырем.
Аналогичным образом строится и североамериканская иерархия, однако, в качестве первичной ЦСП выбрана система типа ИКМ-24, а коэффициенты объединения на всех ступенях иерархии различны.
Практическое применение нашел и японский вариант иерархии, совпадающий на двух первых уровнях с североамериканским стандартом.
Все отмеченные выше типы иерархий относятся к так называемой плезиохронной цифровой иерархии (ПЦИ), в которой при временном группообразовании используются асинхронные методы объединения цифровых потоков, скорости которых могут незначительно отличаться друг от друга.
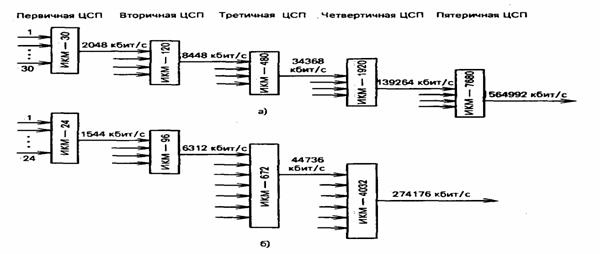
Рисунок 25- Иерархия цифровых систем передачи.
В этом случае необходимо осуществлять согласование скоростей объединяемых (компонентных) потоков. В последние годы происходит бурное внедрение высокоэффективных систем, относящихся к так называемой синхронной цифровой иерархии (СЦИ). Это во многом связано с рядом существенных недостатков, присущих ПЦИ. Один из них, например, заключается в том, что нарушение синхронизма в групповом сигнале ЦСП более высокого уровня приводит к нарушению синхронизма во всех компонентных потоках более низкого уровня, а восстановление синхронизма при этом должно производиться последовательно от высших к низшим ступеням иерархии, что потребует относительно большого времени.
Другой недостаток ПЦИ состоит в том, что организация сети невозможна без выделения (и ввода) из цифровых потоков составляющих, относящихся к более низким ступеням иерархии для целей ответвления, транзита или доступа к служебной информации. При использовании ПЦИ это обычно осуществляется путем последовательного расформирования группового сигнала. что приводит к необходимости применения в пунктах выделения и транзита громоздкого оконечного оборудования. Проблема выделения некоторых составляющих цифрового потока еще более усложнится при реализации на современных сетях глубокой автоматизации функций контроля; управления и обслуживания, что потребует выделения в циклах ЦСП дополнительных специальных позиций и введения в состав станционного оборудования соответствующих интерфейсных, контрольных и исполнительных устройств. Кроме того, следует учитывать, что к настоящему времени сложились три варианта иерархии ПЦИ, отличающиеся номинальными значениями скоростей передачи на различных уровнях: европейский (2048 - 8448 - 34368 - 139264 кбит/с), североамериканский (1544-6312-44736-274176 кбит/с) и японский (1544 - 6312 - 32064 - 97728 кбит/с). Это приводит к соответствующим затруднениям при организации цифровой международной связи.
Возникающие проблемы могут быть эффективно разрешены в рамках СЦИ, которая выступает в ранге новой единой цифровой иерархии и является качественно новым этапом развития цифровой сети связи, создаваемой с учетом новейших достижений в схемотехнике, технике сетей ЭВМ и технологии. К основным достоинствам СЦИ следует отнести:
- упрощение процессов объединения/разъединения цифровых потоков;
- прямой доступ к компонентам с меньшими скоростями без необходимости объединения/разделения всего высокоскоростного сигнала;
- существенное расширение возможностей эксплуатации и технического обслуживания;
- легкий переход к более высоким скоростям передачи по мере развития техники и др.
Передача коммерческой информации в СЦИ рассматривается как процесс перемещения информации, т. е. ее транспортирования. При этом СЦИ реализуется таким образом, что предусматривается возможность транспортирования сигналов не только новых широкополосных служб, но и сформированных с помощью оборудования ПЦИ. Исходные сигналы посредством процедуры временного группообразования преобразуются в синхронный транспортный модуль (СТМ) соответствующего уровня, 'представляющий собой блочную циклическую структуру. Скорость передачи СТМ первого уровня (СТМ-1) установлена равной 155520 кбит/с, что выше скорости передачи четверичной ЦСП европейской ПЦИ (139264 кбит/с). Для СТМ более высокого уровня предусматривается увеличение скорости в N раз, причем N принимает значения 4, 16, 64 (очевидно, что в N раз повышается и скорость передачи по сравнению со скоростью 155520 кбит/с). Более подробную информацию о СЦИ можно получить в специальной литературе. В ЦСП могут организовываться как типовые цифровые, так и типовые не цифровые (аналоговые) каналы и тракты. В частности, канал ТЧ, канал звукового вещания (ЗВ), канал передачи сигналов изображения и звукового сопровождения, а так же первичная группообразования (ПГ), вторичная ВГ, третичная ТГ, чеверичная ЧГ, групповые тракты системы передачи. В ЦСП есть основное понятие – скорость передачи в бит/с (редко Бод). Стыки типовых цифровых каналов между собой и внешней аппаратурой определены по ГОСТу. Типы ИКМ-РСМ-РДН; ИКМ-30; ИКМ-30-4; АКУ- аппаратура каналообразующая унифицируемая зона 15, ИКМ-15, ИКМ-120А, ИКМ-120У, ИКМ-480, ИКМ-120-4/5;Зона 120, Соната –2,3,4, Сопка – 2,3,4 и ИКМ –1920.
Аппаратура каналообрабатывания может быть выполнена с помощью групповых либо индивидуальных АЦП и ЦАП (кодеков). При АЦП из-за переходных процессов в групповом АИМ тракте аппаратуры могут возникать внятные переходные помехи в каналах ТЧ. Если применять индивидуальные кодеки, то в групповом тракте объединяются канальные сигналы в цифровом виде и внятные переходные помехи не возникнут. Достоинство индивидуальных кодеков состоит в том, что при этом путём замены блоков в место любого канала ТЧ может быть получен ОЦК. Группе кодеки применяются в аппарате ИКМ-30, ИКМ-30-4.
Способы передачи цифровых сигналов. В принципе возможны следующие способы:
1) Чисто цифровые системы передачи. В линии только регенераторы.
2) Гибридные: в линии есть и усилители, и регенераторы.
3) По аналоговым трактам, в которых цифровой сигнал передаётся вне рабочей полосы АСП с ЧРК. Аналоговые усилители, как правило, для этого достаточно широкополосные.
4)По аналоговым трактам. Часть аналоговых каналов в пределах рабочей полосы линии связи отдаются под цифровой сигнал.
Первый способ – лучший. При втором способе через несколько регенеративных участков устанавливается усилитель, что позволяет увеличить длину усилительных участков. Для цифровых сигналов регенераторы довольно дорогие , а усилители дешевле, так как нет жестких требований к АЧХ (по сравнению с АСП с ЧРК). Третий способ также используется на практике, но он менее эффективен, так как «лишней» полосы частот в линейном тракте мало. Четвёртый способ используется только при необходимости передать вместо аналоговых сигналов цифровой. Эффективность использования линии несколько снижается, так как цифровой канал требует несколько большей полосы частот , чем аналоговый.
Синхронизация в цифровых СП с ИКМ. Для правильного декодирования ИКМ сигнала и распределения декодированной генератором по соответствующим каналам на приемной станции необходимы тактовая и цикловая синхронизации. Тактовая синхронизация обеспечивает равенство скоростей обработки сигналов на передающей и приемной станциях. Для соблюдения этого равенства ГО оконечной приемной станции управляет тактовая частота, выделяемая из принимаемого ИКМ сигнала.
Синхронизация по циклам обеспечивает правильно разделение каналов, то есть поступление декодированных АИМ сигналов определенных каналов в приемные устройства этих каналов.
Синхросигнал, сформированный на передающей станции, передается по линейному тракту совместно с информационными сигналами. Для выделения синхросигнала на приемной станции он наделяется такими отличительными признаками, как постоянная структура и частота следования (в системах с ИКМ). При включении аппаратуры в работу цикловой синхронизм устанавливается через определенный промежуток времени, который называется временем вхождения в синхронизм. При нарушении синхронизма система переходит в режим поиска, который характеризуется временем поиска синхронизма. Ввиду того, что при отсутствии циклового синхронизма работы системы с ИКМ невозможна, необходимо, чтобы время вхождения в синхронизм и время поиска были возможно малыми. В современных системах с ИКМ это время не превышает нескольких миллисекунд, так как что увеличение может вызвать разъединение абонентов приборами АТС. В качестве синхросигнала можно использовать один двоичный символ или группу символов определенный структуры.
Устройства, цикловой и СЦС содержат формирователи синхросигнала на передающей станции (рисунок 24). Формирователь формирует синхросигналы выбранной структуры, которые через устройство временного объединения вводятся в групповой цифровой тракт. Приемник синхросигнала осуществляет контроль состояния циклового и еще синхронизма при работе системы, обеспечивает вхождение системы в синхронизм при первоначальном включении аппаратуры и при нарушениях синхронизма в процессе работы.
Принцип действия приемника синхросигнала рассмотрим на примере приемника со скользящим поиском и одноразрядным сдвигом, применяемого в ИКМ-30. Контроль состояния циклового синхронизма здесь осуществляется проверкой совпадения во времени символов синхросигналов, поступающих с линии и вырабатываемых ГО приема.
Приемник содержит опознаватель, анализатор, решающее устройство. Опознаватель синхросигнала служит для выделения синхрогрупп из принятого ИКМ сигнала. При поступлении в регистр опознавателя синхросигнала заданной структуры он срабатывает и на выходе схемы И1 образуется единичный сигнал. В анализаторе осуществляется сравнение момента появления этого сигнала с моментом поступления местного сигнала контроля, формулируемого схемой И2. Если моменты появления этих сигналов совпадают, то анализатор принимает решение о наличии синхронизма и на его выходе «синхро» появляется сигнал подтверждения синхронизма. Если это совпадение не наблюдается, то на выходе «Ошибка» анализатора появляется сигнал отсутствия синхронизма. РУ – считывает сигналы отсутствия синхронизма и при поступлении нескольких подряд сигналов ошибки принимает решение об отсутствии синхронизма и подает сигнал запрета на ГО. При получении этого сигнала работа делителя ГО и декодирование сигнала прекращается, система переходит в режим поиска синхронизма.
В режиме поиска продолжается поразрядная запись ИКМ сигнала. При поступлении в опознаватель синхросигнала на выходе схемы И1 вновь появляется сигнал. На выходе «синхронизации» анализатора появляется сигнал о наличии синхросигнала, РУ снимает сигнал запрета с работы ГО.
Когда РУ принимает решение об отсутствии синхронизма только при поступлении подряд нескольких сигналов ошибки, он предохраняет систему от сбоя синхронизации при кратковременных искажениях синхросигнала.
Принцип действия приемника СЦС аналогичен, только СЦС осуществляется после установления цикловой синхронизации.
Цикловая синхронизация. (синхронизация по циклам). Синхронизация по циклам обеспечивает правильное разделение кадров, т.е. поступление декодированных АИМ сигналов определенных каналов в приемные устройства этих каналов. При включении аппаратуры в работу цикловой синхронизм устанавливается через определенный промежуток времени, который называется временем вхождения в синхронизм. При нарушении синхронизма системы переходит в режим поиска, который характеризуется временем поиска синхронизма. При отсутствии ЦС работа системы с ИКМ невозможна, необходимо, чтобы время вхождения в синхронизм и время поиска были возможно малыми.
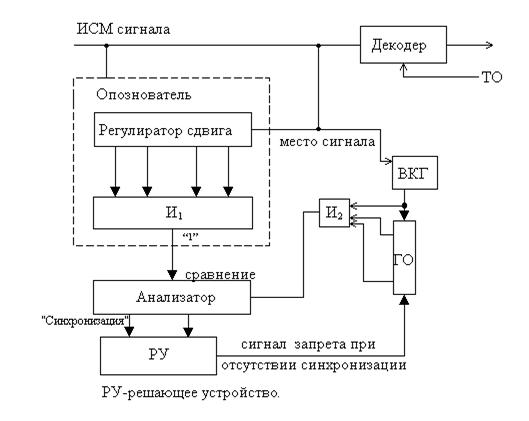
Рисунок 24- Устройство цикловой и сверхцикловой синхронизации
При обнаружении истинного синхронизма накопитель по выходу в синхронизм заполняется и сбрасывает накопитель по выходу из синхронизма в нулевое состояние, в результате чего синхронизации в режиме удержания синхронизма.
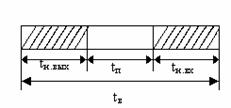
Рисунок 26- Схема время накопления синхронизма
Как видно, из рисунка в неадаптированном приемнике синхросигнала время восстановления tв складывается из времени накопителя по выходу из синхронизма tн.выхода, время накопителя по входу в синхронизм входа и времени поиска синхросигнала tп.
Недостатки: значения емкости накопителей по выходу из синхронизма и по входу в синхронизм фиксированны; практически никогда не могут быть достигнуты оптимальные параметры времени восстановления синхронизма.
Искажения передачи символов в кабельной линии вероятность очень низкий 10-6 и ниже, а по радиорелейной линией (РРЛ) – свыше 10-3 . Указанные недостатки устраняются в приемнике синхросигнала в адаптивном к повышению вероятности искажения символов в тракте.
Формирователь команды согласования скоростей (КСС). КСС должны обладать примерно такой же помехоустойчивостью, как и синхросигналы. Это объясняется тем, что искажение упомянутой команды в системе цифровой связи n-ого порядка, сбои цикловой синхронизации соответствующей этой команде системе (n-1)-го порядка, и затем сбой цикловой синхронизации во всех объединяемых системах более низкого порядка. При односторонних согласованиях скоростей количество символов, требуемое для передачи указаний информации, гораздо меньше, чем в системах с двухстрононним согласованием скоростей. Такие системы называют системами с двусторонним согласованием скоростей и двукомандным управлением. По числу передаваемых команд подобные системы идентичны системам с односторонним согласованием скоростей.
Когда временной интервал между импульсами записи и считывания превышает период импульсов считывания Тсч, формируются две подряд следующие команды одного знака, по которым производится коррекция временных положений импульсов считывания
Приемник команд согласования скоростей. В приемнике КСС производится опознавание вида и коррекция ошибок принимаемых команд. Обычно команды согласования скоростей передаются кодовыми группами вида 00…0 и 11…1, что позволяет реализовать опознаватель этих команд в виде счетчика числа импульсов и осуществлять правильное их опознавание, если число искаженных символов не превосходит половины общего числа символов в команде.
12 Лекция №12. Цифровой линейный тракт (ЦЛТ). Способы уменьшения искажений. Линейные коды ЦСП.
Цель лекции: изучение способов уменьшения линейных искажении. Линейные коды ЦСП.
Содержание лекции: цифровой линейный тракт, коды применяемые в линейных трактах ЦСП. Стыковые коды ЦСП.
В ЦЛТ ЦСП содержит оконечную станцию, направляющую среду, необслуживающие регенерационные пункты (НРП) и обслуживающие усилительные пункты (ОУП). Большая часть линии является необслуживаемой, которая дистанционно питается от оконечных пунктов (ОП) и ОРП (ОУП). ОАЛТ служит для согласования характеристик передаваемого группового сигнала (цифрового) с параметрами и характеристиками аппаратуры дистанционного пункта (ДП), телеконтроля (ТК), телемеханики (ТМ), переключения на резервные тракты передачи служебной связи и т.п. ЦЛТ характеризуется рядом показателей, определяющих качество передачи цифрового сигнала. Основная из них -вероятность ошибки передачи отдельных символов, зависящая как от искажений сигнала в линии связи, так и от воздействия помех на магистрали. Источниками искажений сигнала являются участки линии связи и блоки сопряжения линии с входом и выходом аппаратуры связи. При значительном ограничении полосы возникает явление наложения символов цифрового сигнала за счет увеличения их длительности. Это приводит к тому, что соседние символы будут приняты с ошибкой, то есть такие искажения называются межсимвольными искажениями первого рода. Межсимвольные искажения возникают и за счет ограничения полосы пропускания линейного тракта в области низких частот. Искажения цифрового сигнала, возникающие из-за ограничения полосы пропускания линейного тракта в области низких частот, называются межсимвольными искажениями второго рода.
Способы уменьшения искажений. Чтобы скомпенсировать влияние разделительных элементов, в принципе можно использовать корректор с коэффициентом передачи Ккор(f), обратный коэффициенту передачи линейного тракта Клт(f) и удовлетворяющий условию Ккор(f)Клт(f)=const, т.е. вследствие того, что при f ®0, Ккор ® ¥, практическая реализация корректора невозможна. Помимо передачи цифрового сигнала, содержащего мощные низкочастотные составляющие, по линии необходимо также передать постоянный ток ДП, а это приводит к проблеме разделения постоянной составляющей сигнала и тока ДП в НРП.
Исходные первичные сигналы могут быть получены путем RZ и NRZ кодирования(«с возвращением или без возвращения к нулю»). Код в формате RZ представляет собой последовательность униполярных импульсов со скважностью q=Т/t=2
Энергетический спектр G(f) такого сигнала содержит дискретные компоненты, в частности колебание с тактовой частатой fт, и интенсивные низкочастотные составляющие. Ширина первого лепестка спектра=2fт.
Код в формате NRZ представляет собой перпендикулярность однополярных импульсов со скважностью q=1(смотрите рисунлк а). Энергетический спектр такого сигнала не содержит дискретных составляющих, его непрерывная составляющая концентрируется в области НЧ частот, и имеется мощная постоянная составляющая. Такие сигналы не могут быть переданы по линии без существенных межсимвольных искажений и ошибок, поэтому возникает необходимость преобразования двоичного униполярного сигнала в удобный для передачи по линии связи линейный сигнал (ЛС).
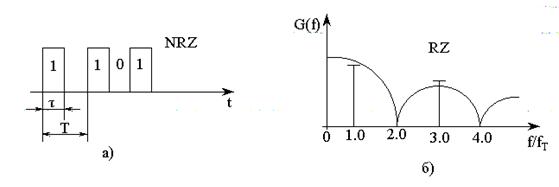 Рисунок
27- Энергетический спектр сигнала. а) двоичный сигнал
Рисунок
27- Энергетический спектр сигнала. а) двоичный сигнал
Таким образом, для передачи по линейному тракту исходные цифровые сигналы перекодируются «код в линий», отвечающий перечисленным требованиям. Среди известных методов преобразования двоичного сигнала (ДС) в линейный единица не является лучшим по всем указанным выше требованиям, поэтому в разных ЦСП применяются различные линейные коды.
Коды используемые в ЦСП: КВП-2, КВП-3, МЧПИ или НДВ – 2,3. q – 2,3 и т.д(q-максимальное число следующих нулей в исходном ДС). Если в реальном «пакете» нулей их число будет меньше q, то линейное кодирование осуществляется по коду ЧПИ, то есть нули не преобразуются, а каждая единица имеет длительность в половину тактового интервала Тт, причем, ее полярность противоположна полярности предыдущей единицы. Если в «пакете» нулей их число больше q, то каждый пакет из (q+1) нулей заменяется сигналами 000V или B00V. Полярности вводимых импульсов B и V выбираются так, чтобы на интервале в (q+1) тактов происходило одно нарушение правила чередования полярности. Поэтому нарушению на приемной стороне ОС при преобразовании ЛС (линейного сигнала) в двоичный сигнал(ДС) принимают решение об истинном содержании пакета. Полярность импульса В всегда противоположна полярности предшествующего импульса; если между двумя соседними паузами в ДС, имеющими число нулей больше, чем q+1=3+1=4, насчитывается четное число единиц, то заполнение второй паузы начинается с сигнала B00V. Если число единиц между паузами нечетное, то заполнение второй паузы начинается с сигнала 000V. В процессе заполнения очень длинной паузы пакет из (q+1) нулей заменяется комбинацией B00V (см. рисунок 26).
Существенным недостатком кода ЧПИ является трудность реализации УВТЧ. Если в двоичном сигнале появляется подряд множество символов 0, то на входе УВТЧ будет действовать длительная пауза, что может привести к срыву его работы. Есть модификации кода ЧПИ состоит в том, что паузу, длина которой превышает n нулей, помещают балластные сигналы. Они препятствуют ухудшению работы УВТЧ, но в то же время легко могут быть обнаружены и изъяты на приеме. Например, код КВП-3, у которого n=3.
В качестве балластных используются два типа сигналов, имеющих условное обозначение 000V и B00V. B полярность всегда противоположна полярности предшествующего импульса, полярность импульса V всегда совпадает с полярностью предшествующего импульса.

Рисунок 26- Пример преобразования кода
МЧПИ (НДВ), передаваемый трехуровневым кодом с той же fт, что и исходный двоичный сигнал, широко используется в первичных, вторичных и третичных ЦСП (ИКМ-30, ИКМ-120, 480), работающих по симметричным и коаксиальным кабелям. Кроме того, трехуровневый код применяется и как «стыковой» сигнал в оконечный аппаратуре для соединения разных иерархических структур.
Скремблирование сигнала. Возможность исключения длинных пакетов нулей или единиц описывает третий способ преобразования ДС в ЛС с сохранением тактовой частоты и числа разрешенных уровней, называемый скремблированием. При этом ДС подвергается операции перемножения с некоторой, известной заранее, псевдослучайной двоичной последовательностью (ПСП): ЛС=ДСÅПСП. На приемной стороне выполняется обратная операция: ДС=ЛСÅПСП.
К достоинствам скремблированного сигнала можно отнести:
а) возможность достаточно точного расчета параметров ВТЧ регенераторов, поскольку может быть определена вероятность появления любой комбинации в линейном сигнале;
б) универсальность, которая заключается в возможности сквозной передачи скремблированного сигнала по сети связи через любые цифровые такты, так как скремблирование исходного двоичного сигнала осуществляется без преобразования его в другой вид, а выделение исходного сигнала производится только в приемном оборудовании ОС;
в) уменьшение влияния статистических параметров исходного сигнала на фазовое дрожание цифрового сигнала в линии;
г) обеспечение возможности контроля качества передачи нарушении чередования полярности импульсов при применении скремблирования совместно с простейшим кодом типа ЧПИ и др.
Размножение ошибок при скремблировании несколько ограничивает область применения данного метода.
Комбинированные линейные коды. Широкое применение на практике получили комбинированные способы преобразования ДС в ЛС. Эти способы основаны на совместном использовании сразу нескольких рассмотренных вариантов перехода от ДС к ЛС.
Так, в ЦСП ИКМ-480С применяется линейное кодирование, при котором из ДС сигнала формируется двоичный униполярный код 5В6В, имеющий тактовую частоту
fт=fл=6fт/5=6*34368/5=41241 Кбит/с
А затем осуществляется преобразование его в двоично-симметричный линейный код. Увеличение fт в этой ЦСП компенсируется более высокой помехозащищенностью линейного сигнала, передаваемого двухуровневым симметричным кодом. Широко применяется также совместное использование скремблирования исходного ДС и его дальнейшее преобразования в двоичный симметричный код или код ЧПИ.
В волоконно-оптических ЦСП модуляция оптического излучения производится, как правило, только двухуровневым униполярным ЛС. Поэтому здесь используют блочные коды вида mBnB, скремблирование или сочетание этих преобразований.
Необходимость преобразования двоичного сигнала возникает не только при передаче его по линии связи, но и при соединениях между собой отдельных стоек и даже блоков цифровой аппаратуры на оконечном пункте. Дело в том, что различные стойки и блоки аппаратуры имеют разные потенциалы по постоянному току, поэтому сигнальные кабели(коаксиальные и симметричные) должны подключаться через разделительные элементы(трансформаторы, конденсаторы). А они вызывают очень сильные межсимвольные искажения второго рода. Для исключения этих искажений двоичный сигнал на выходе одного блока (стойки) проходит предварительно через стыковый кодер, а на входе другого блока – через стыковый декодер.
При стыковом кодировании двоичный сигнал преобразуется в стыковый сигнал, в котором постоянная составляющая сигнала известна заранее. Это позволяет ее потерять, а потом легко восстановить без искажения формы спискового сигнала.

Рисунок 28- Стыковые коды, применяемые в ЦСП
В качестве стыковых кодов в первичный, вторичный и третичный ЦСП обычно применяют код ЧПИ и МЧПИ, а в четверичный ЦСП код CMI. Стандартизированы также стыковый сигнал, который передается на стыке между 4-х проводным цифровым окончанием первичной ЦСП и цифровым абонентским телефоном. Особенность сигнала в том, что в нем, кроме тактовых интервалов, следующих с частотой Fт=64Кбит/с, должна легко обнаруживаться граница между словами – 8 – разрядными кодовыми комбинациями. Стыковый сигнал, удовлетворяющий этим требованиям, строится так: сначала производят преобразование вида 1В4В, при котором символы 0 исходной ДС заменяются 4-символьной комбинацией вида 1010, а символы 1-комбинацией 1100. При этом постоянная составляющая в таком сигнале становится постоянной на любом тактовом интервале. Чтобы ее потерять (равной нулю), достаточно поочередно на каждом интервале менять полярность символа на противоположную. Чтобы определить границу кодовой комбинации, по аналогии с кодом МЧПИ (НДВ) достаточно в каждом последнем, 8-м разряде комбинации нарушать это правило чередования полярности. На цифровом входе/выходе каждого мультиплексора соответствующий цифровой сигнал должен быть сформирован не на двоичном униполярном коде, а в определенном стыковом коде с заданной амплитудой и формой импульса и номинальной fт:
Е0-64 Кбит/с; Е1 – 2048 Кбит/с передается в коде НДВ-3; Е2 – 8448 Кбит/с – в коде НДВ-3; Е3 – 34368 Кбит/с – НДВ-3; Е4 – 139264 Кбит/с – в коде СМI.
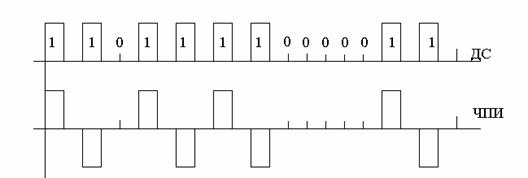
Рисунок 29- Преобразование двоичного сигнала в троичный
Код B3ZS является модифицированным квазитроичным и называется биполярным с замещением трех нулей символом логической 1, имеют длительность равную половине тактового интервала.
ОБС – относительный биимпульсный
АБС – абсолютный биимпульсный
ПИТ – парноизбирательный троичный
ПРКК – почти разностный квазитроичный код
Список литературы
1. Кирилов В.И. Многоканальные системы передачи: Учебник. - М.: Новое поколение, 2002.
2. Баева Н.Н., Гордиенко В.Н. Многоканальные системы передачи: Учебник для вузов. - М.: Радио и связь, 1997.
3. Галкин В.А., Григорьев Ю.А. Телекоммуникации и сети. - М.: МГТУ им. Баумана Н.Э., 2003.
4.Телекоммуникационные системы и сети. Под ред. В.П.Шувалова: Учебное пособие. -т.1. - М.: Горячая линия - Телеком, 2003.
5.Гаранин М.В., Журавлев В.И. и др. Системы и сети передачи информации. - М.: Радио и связь, 2001.
6.Иванов В.И. Гордиенко В.Н., Попов Г.Н. и др. Цифровые и аналоговые системы передачи. - М.: Радио и связь. 1995.
7.Баева Н.Н., Гордиенко В.Н., Тверецкий М.С. Проектирование цифровых каналов передачи: Учебное пособие. - М.: МТУСИ, 1996.
8.Берганов И.Р., Гордиенко В.Н., Крухмалев В.В. Проектирование и техническая эксплуатация систем передачи. - М.: Радио и связь, 1989.
9.Левин Л.С., Плоткин М.А. Цифровые системы передачи информации. - М.: Радио и связь, 1982.
10.Зингеренко А.М., Баева Н.Н., Тверецкий М.С. Системы многоканальной связи. - М.: Связь, 1980.
11.Четкин С.В. Методические указания и задания на курсовой проект «Цифровая многоканальная система передачи с ИКМ». - М.: МИС, 1991.
12.Иванов Ю.П. и др. Унифицированное каналообразующее оборудование для цифровых систем передачи. - М.: Средства связи, 1985.
13. Баева Н.Н. Многоканальная электросвязь и РРЛ: Учебник для вузов. - М.: Радио и связь, 1988.
14. Голубев А.Н., Иванов Ю.П., Левин Л.С. Аппаратура ИКМ-120. -
М.: Радио и связь, 1988.
15. Цифровые и аналоговые СП. Под ред. В.И.Иванова.- М.: Горячая линия, 2003.
16. Галкин В.А., Григорьев Ю.А. Телекоммуникации и сети. - М.: МГТУ им. Баумана Н.Э., 2003.
17. Гордиенко В.Н., Крухмалев В.В. Проектирование и техническая эксплуатация СП: Учебное пособие для вузов. - М.: Радио и связь, 1996.