МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
Некоммерческое акционерное
общество
"Алматинский институт энергетики и связи"
Агатаева Б.Б., Дарибаева Р.А.
МНОГОКАНАЛЬНЫЕ ТЕЛЕКОММУНИКАЦИОННЫЕ СИСТЕМЫ
Учебное пособие
Алматы 2009
В учебном пособии излагаются
вопросы построения, проектирования и
практического применения в телекоммуникационных сетях современных
цифровых многоканальных телекоммуникационных систем.
Илл.- 42, табл.- 8, библиогр. - 22 назв.
Содержание
Введение 5
1 Цифровые способы передачи сигнала
1.1 Роль цифровых способов передачи сигнала 6
1.2 Формирование цифрового сигнала 7
1.3 Иерархия цифровых телекоммуникационных систем 11
2 Сигналы электросвязи и методы их описания
2.1 Уровни передач 14
2.2 Параметры и характеристики сигналов 15
2.3 Первичные сигналы электросвязи 17
3 Аналогово-цифровое и цифро-аналоговое преобразование сигналов 22
3.1 Структура оконечной станции 29
3.2 Структура первичного цифрового потока 31
3.3 Функциональная схема генераторного оборудования 33
3.4 Универсальная система первичного мультиплексирования 34
4 Синхронизация оборудования цифровых телекоммуникационных
систем 39
4.1 Задающий генератор в автономном режиме 40
4.2 Выделение хронирующего сигнала 43
4.3 Цикловая синхронизация 46
4.4 Структура и принцип действия приемника циклового синхросигнала 47
5 Мультиплексирование цифровых потоков 50
5.1 Синхронное мультиплексирование 51
5.2 Система команд двустороннего согласования скоростей 53
6 Передача цифровых сигналов 57
6.1 Помехоустойчивость регенератора 58
6.2 Коррекция межсимвольных искажений 60
6.3 Коэффициент ошибок регенератора 61
6.4 Метод "глаз-диаграммы" 63
6.5 Коды в линии 65
6.6 Общие характеристики кодов 68
6.7 Виды кодов в линии ЦТС различных типов 73
Список литературы 78
Условные обозначения:
АИМ - амплитудно-импульсная модуляция
АЦО - аналого-цифровое оборудование
БВН - код без возвращения к нулю
ВВГ - вторичное временное группообразование
ВОСП - волоконно-оптическая система передачи
ВСС - взаимоувязанная сеть связи
ВЧ - высокочастотный
ДП - дистанционное питание
ИКМ - ипульсно-кодовая модуляция
КВП - код с высокой плотностью единиц
КИ - канальный интервал
КУ - корректирующий усилитель
МККТТ - международный консультативный комитет по телефонии и
телеграфии
МСИ - межсимвольный интервал
МСЭ - международный союз электросвязи
НРП - необслуживаемый регенерационный пункт
НЧ - низкочастотный
ОЛСТ - оборудование линейного световодного тракта
ООС - оборудование обслуживания стойки
ОП - оконечный пункт
ОРП - обслуживаемый регенерационный пункт
ОС - оконечная станция
ОЦК - общий цифровой канал
ПС - промежуточная станция
РУ - решающее устройство
САЦО - стойка аналого-цифрового оборудования
СЛО - стойка линейного оборудования
СОО - стойка оконечного оборудования
СУВ - сигнал управления и взаимодействия
ТИ - тактовый сигнал
СЦС - сверхцикловой синхросигнал
ТВГ - третичное временное группообразование
ТР - точка решения
ТЧ - канал тональной частоты
ЧВГ - четвертичное временное группообразование
ЧПИ - код с чередованием полярности
ВРК - временное разделение каналов
АЦП - аналого-цифровой преобразователь
СП - система передач
ЦСП - цифровая система передач
Введение
Настоящее учебное пособие соответствует программе дисциплины "Многоканальные телекоммуникационные системы". Указанная дисциплина является базовой дисциплиной для одноименной специальности 050719 для студентов всех форм обучения. По существу, это предмет, который изучает, анализирует фундаментальные проблемы и явления, которые по -прежнему являются базовыми для теории и практики связи, формируют основу для создания сложнейших телекоммуникационных систем.
Очевидно, что самые современные технологии по-прежнему требуют глубокого понимания фундаментальных основ. Этим объясняется необходимость издания учебного пособия. При подготовке нового издания авторы учитывали, что изучению данной дисциплины предшествует знакомство с такими курсами, как : "Теория электрической связи", "Основы построения телекоммуникационных систем и сетей", "Направляющие системы электросвязи" и др.
Одновременно было также учтено то обстоятельство, что вопросы построения аналоговых систем передачи широко и подробно изложены в различных учебниках, пособиях и монографиях. Поэтому основное внимание было обращено на изложение вопросов построения, проектирования и практического применения на телекоммуникационных сетях, современных цифровых многоканальных телекоммуникационных систем.
В учебном пособии широко используются материалы руководящих и нормативных документов отрасли, а также международные рекомендации по цифровым телекоммуникационным технологиям.
1 Цифровые способы передачи сигналов
1.1 Роль цифровых способов передачи сигналов
Тенденции развития телекоммуникаций в ХХI веке показывают, что человечество движется по пути создания глобального информационного общества. Понятие информационного общества (ИО) четко не определено, но можно предположить, что это такое общество, в котором информатизация и телекоммуникации (инфокоммуникации) будут определять новую ступень развития экономики, социальной сферы, культуры и науки. Первой публикацией на тему ИО принято считать Меморандум Клинтона-Гора «Технология экономического роста Америки. Новое направление, которое предстоит создать", опубликованный в 1993 г. В качестве приоритетов роста экономической мощи США в нем были определены промышленность, электросвязь, энергетика, образование, экология и социальная сфера. Через год аналогичные шаги были предприняты и в Европе. В 1995г. Международный союз электросвязи (МСЭ) взял на себя ведущую роль по международной координации работ по электросвязи, направленных на построение глобального ИО. К работе над ИО подключился и Европейский институт стандартов электросвязи (ЕТSI) с целью создания Европейской информационной инфраструктуры (ИИ).Предполагается создание национальных информационных инфраструктур ГИИ должна поддерживать существующие и будущие средства электросвязи, информационные технологии и бытовую электронику, включая интерактивные, вещательные и мультимедийные возможности. Она охватывает проводные и радиосредства связи, стационарные и подвижные сети. Таким образом, ГИИ представляет собой интеграцию электросвязи, информатизации, компьютеризации, баз данных и бытовой электроники. Интеграция указанных областей невозможна без унификации формы представления информации с целью ее передачи и хранения. Такой универсальной формой является цифровая.
Информация передается и обрабатывается в большинстве случаев в виде сигналов электросвязи - электромагнитных колебаний, в изменениях параметров которых и заложена передаваемая информация. Например, речевое сообщение, представляющее собой изменение звукового давления, посредством микрофона превращается в изменяющееся соответствующим образом электрическое напряжение. В этих изменениях и будет содержаться та информация, которая была в исходном сообщении. Характерно, что в данном случае напряжение непрерывно изменяется во времени - такие сигналы называются непрерывными.
Передача и обработка сигналов в цифровой форме имеют следующие существенные преимущества перед передачей и обработкой аналоговых сигналов:
-унификация различных видов передаваемой информации, что позволяет, в свою очередь, унифицировать оборудование передачи, обработки и хранения информации;
-компьютеризация телекоммуникационного оборудования, которая принципиально невозможна при использовании аналоговых сигналов. В условиях быстро нарастающего информационного обмена без компьютеризации невозможно обеспечить передачу и обработку информации с необходимым высоким качеством;
-интеграция систем передачи информации и систем коммутации -создание полностью цифровых телекоммуникационных сетей. Такие сети обладают высокой надежностью и эффективностью, поскольку позволяют организовывать альтернативные маршруты передачи и выравнивать сетевой трафик;
-высокая помехоустойчивость. Представление информации в цифровой форме позволяет осуществлять регенерацию (восстановление) символов сигналов при передаче их по линии связи, что резко снижает влияние помех и искажений на качество передачи информации. Суть регенерации заключается в замене принятого искаженного сигнала на заново генерированный сигнал. При этом в частности, обеспечивается возможность использования линий связи, на которых из-за высокого уровня помех аналоговые системы передачи применяться не могут;
-цифровые методы передачи весьма эффективны при работе по оптическим линиям, позволяющим организовывать передачу высокоскоростных потоков информации с относительно редким расположением промежуточных станций;
-стабильность параметров каналов. Стабильность и идентичность параметров каналов (остаточного затухания, частотной и амплитудной характеристик и других) определяются в основном устройствами обработки сигналов в аналоговой форме. Поскольку такие устройства, как будет показано далее, составляют незначительную часть оборудования цифровых телекоммуникационных систем (ЦТС), стабильность параметров каналов таких систем значительно выше, чем аналоговых. Этому также способствует отсутствие в ЦТС с ВРК влияния загрузки системы на параметры отдельных каналов.
1.2 Формирование цифрового сигнала
Рассмотрим последовательное преобразование аналоговых сигналов в цифровые, пригодные для передачи по линии связи. Для простоты будем считать, что имеется всего два первичных (исходных) сигнала, которые следует передать по одной и той же линии связи. Графики (см. рис.1.1,а ) показывают изменение напряжений сигналов во времени. На этих графиках узкими импульсами отмечены мгновенные значения сигналов, взятые с периодом дискретизации Тд. Характерно, что период относительно невелик, т.е. между соседними мгновенными значениями изменение сигнала происходит плавно. Последовательности мгновенных значений для различных сигналов смещены друг относительно друга на величину Тк, называемую канальным интервалом. Наличие канального интервала позволяет на приемном конце осуществить временное разделение канальных сигналов.
Операцию квантования сигналов иллюстрирует рисунок (1.1,б) дискретные мгновенные значения первичных сигналов, перенесенные из графиков (см. рисунок 1.1,а) округляются до разрешенных значений (в нашем случае это целые числа 0, 1,2,...). Под графиком приведены округленные значения в двоичных числах. Заметим попутно, что операция объединения мгновенных значений различных сигналов является операцией формирования группового сигнала. Главное требование, которому должен удовлетворять групповой сигнал, является требование возможности его обратного преобразования - разделения на исходные сигналы. Заметим также, что формирование группового сигнала можно было бы осуществить и на последующих этапах обработки сигнала.
График (см. рисунок 1.1,в) иллюстрирует операцию кодирования -замены округленных мгновенных значений соответствующими двоичными кодовыми комбинациями. На графике условно нули показаны низкими импульсами, обычно же нулям соответствует отсутствие импульса. Кодовые комбинации (кодовые слова) в данном случае четырехразрядные -число разрядов в общем случае определяется максимальным числом разрешенных значений или числом шагов квантования. Период, в течение которого передается по одному мгновенному значению каждого канального сигнала, называется циклом передачи или кадром. Чтобы разделить принимаемый поток на циклы передачи и далее на отдельные кодовые слова, перед началом цикла передается цикловой синхросигнал. В данном случае это комбинация 1010, но в общем случае это может быть и какая-то другая, например, 0000. Во всяком случае, отличие циклового сигнала от любой другой комбинации в потоке заключается в том, что цикловой сигнал всегда периодически повторяется на одних и тех же позициях, в то время как другие комбинации в потоке случайны.
Следующий этап преобразования сигнала зависит от среды его распространения (вида линии передачи). Так, например, при использовании кабеля с металлическими жилами сигнал преобразуют в так называемый код с чередованием полярности импульсов (ЧПИ). В этом коде на нулевых позициях импульсы отсутствуют, а единицы передаются импульсами чередующейся полярности, как это показано на рисунке 1.1,г.
На приеме сигналы претерпевают обратные преобразования. При прохождении сигнала по линии он искажается и подвергается воздействию помех. На графике (см. рисунок 1.2,а) условно показан вид такого сигнала. На графике силуэтом отмечены также исходные импульсы. Первоначальная операция на приеме - регенерация (восстановление) формы импульсов и их временных соотношений. Регенератор генерирует импульсную последовательность (см.рисунок 1.2,б) на основе информации (мгновенные значения, спектральный состав), содержащейся в принимаемом сигнале. При этом возможны ошибки - генерация единичного импульса вместо нулевого и наоборот (на рисунке не показано). Далее сигнал преобразуется из линейного кода в двоичный (см.рисунок 1.2,в), после чего восстанавливаются мгновенные значения исходных сигналов (см. рисунок 1.2,г).
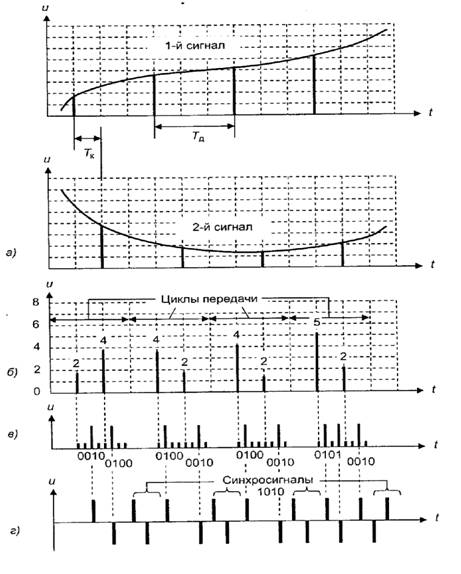
Рисунок 1.1- Последовательность преобразования сигналов в цифровой телекоммуникационной системе на передаче
Мгновенные значения, относящиеся к различным исходным сигналам, разделяются посредством временного селектора -набора ключей, каждый из которых замыкается в период прохождения соответствующего мгновенного значения. Как уже отмечалось, временное объединение/разделение каналов может осуществляться и на другом этапе, например, перед преобразованием сигнала в линейный код на передаче и после преобразования из линейного кода в двоичный -на приеме. Мгновенные значения, относящиеся к данному сигналу, интегрируются -сглаживаются посредством фильтра нижних частот (см. рисунок 1.2,д). Восстановленные таким образом исходные сигналы поступают к принимающему абоненту. Поскольку мгновенные значения на передаче были квантованы (округлены), восстановление сигнала неизбежно сопровождается ошибками, которые являются источником так называемых шумов квантования. Однако, как уже отмечалось, эти ошибки могут быть снижены до приемлемых значений путем уменьшения шагов квантования. Правда, это увеличит число разрешенных уровней и, следовательно, потребует передачи при прочих равных условиях большего объема информации.
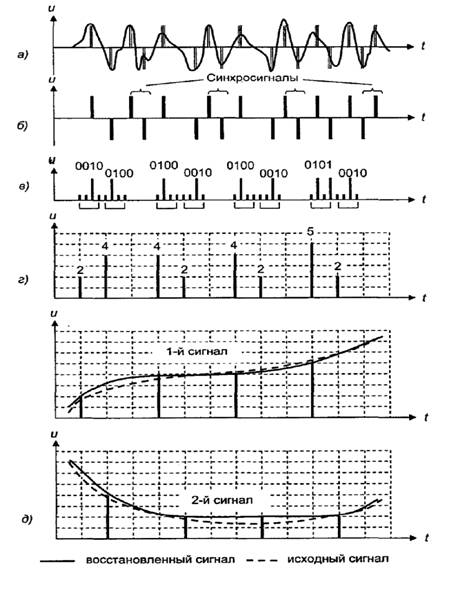
Рисунок 1.2- Последовательность преобразования сигналов на приеме
1.3 Иерархия цифровых телекоммуникационных систем
Исторически сложилось так, что многоканальные телекоммуникационные системы строятся по иерархическому принципу, который заключается в следующем. В первичной системе передачи объединяется (мультиплексируется) n исходных сигналов в первичный групповой сигнал (в частности, в первичный цифровой поток), во вторичной системе m групповых первичных сигналов объединяются во вторичный групповой сигнал и так далее. Таким образом, те или иные групповые сигналы представляют иерархические наборы исходных сигналов или иначе ступени иерархии, из которых и выбирается та, которая соответствует системе передачи с необходимым количеством исходных каналов. Величины m и n в данном случае являются коэффициентами мультиплексирования.
В начале 1980-х годов были разработаны три плезиохронные цифровые иерархии (ПЦИ), в которых за исходный сигнал был принят сигнал, передаваемый со скоростью 64 кбит/с, что соответствует сигналу, передаваемому по каналу тональной частоты (ТЧ), но в цифровой форме. Канал, предназначенный для передачи этого сигнала (030-цифровой сигнал нулевого уровня), называется основным цифровым каналом (ОЦК).
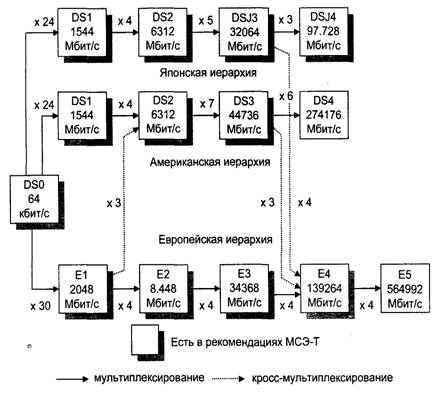
Рисунок 1.3- Схема плезиохронных цифровых иерархий
Первая цифровая иерархия, принятая в США и Канаде, имеет четыре
ступени с коэффициентами мультиплексирования: 24, 4, 7 и 6, что соответствует 24, 96, 672 и 4032 ОЦК для первой, второй, третьей и четвертой ступени соответственно. С учетом добавления в групповой сигнал на каждой ступени мультиплексирования сервисной информации, сигналы 01, 032, 033 и 034 имеют скорости передачи 1544, 6312, 44736 и 274176 кбит/с. (обычно приводятся округленные величины 1,5, 6, 45 и 274 Мбит/с).
Вторая цифровая иерархия, принятая в Японии, также имеет четыре ступени, но с коэффициентами мультиплексирования 24, 4, 5, 3, что соответствует 24, 96, 480 и 1440 каналам ОЦК. Скорости передачи на 1 - 4 ступенях иерархии равны 1544, 6312, 32064, 97728 кбит/с (1,5, 6, 32, 98 Мбит/с).
Третья цифровая иерархия, принятая в Европе и Южной Америке, имеет пять иерархических ступеней с коэффициентом мультиплексирования на первой ступени, равным 30, и с коэффициентами на остальных ступенях, равными четырем. В этой иерархии количество ОЦК на 1 - 5 ступенях равно 30, 120, 480, 1920, 7680, а скорости передачи равны соответственно 2048, 8448, 34368, 139264, 564992 кбит/с (2, 8, 34, 140, 565 Мбит/с). На рисунке 1.3 показаны также рекомендованные пути соединения систем различных плезиохронных иерархий (пути кроссмультиплексирования) с соответствующими коэффициентами мультиплексирования. На рисунке даны названия сигналов ступеней иерархий, скорости передачи и отмечены ступени, не вошедшие в рекомендации МСЭ-Т.
Системы ПЦИ сыграли в деле цифровизации телекоммуникационных сетей роль, которую невозможно переоценить. С их применением стала возможной электронная коммутация и переход к цифровым сетям интегрального обслуживания. Однако такие недостатки ПЦИ, как громоздкость процедур ввода/вывода компонентных потоков из потоков высших ступеней, сложность соединений сетей различных ПЦИ и невозможность организации современного менеджмента на сетях предопределили разработку новой цифровой иерархии. В концепции этой иерархии, получившей название синхронной цифровой иерархии (СЦИ), сделана попытка наиболее полно предусмотреть вероятные перспективы дальнейшего развития телекоммуникационных сетей. В настоящее время можно сказать, что предполагаемые результаты данной разработки в основном оправдываются.
Главными целями разработки СЦИ являлись:
- упрощение процедуры доступа к компонентным потокам;
- обеспечение возможности развитой маршрутизации потоков;
- осуществление в пределах иерархии эффективного управления сетями любой сложности; систематизация иерархического ряда скоростей передачи и продолжение его за пределы рядов ПЦИ;
- разработка стандартных интерфейсов для облегчения стыковки оборудования.
Скорость передачи для первой ступени иерархии была выбрана равной 155,52 Мбит/с.Она должна была превышать максимальную стандартизированную скорость ПЦИ 139.264 Мбит/с и обеспечивать передачу дополнительной сервисной информации. Кроме того, она должна была быть приблизительно кратной скорости первичного потока ОСI (50688 кбит/с), стандартизированного в США. Скорость каждой последующей иерархической ступени равна учетверенной скорости предыдущей. В настоящее время наибольшее распространение получила аппаратура первых четырех ступеней иерархии, однако существует оборудование, позволяющее получить скорости пятой ступени СЦИ. Ступени иерархии обозначаются как SТМ-п (синхронные транспортные модули), где п - число объединенных первичных потоков.
Таблица 1.1- Виды иерархических ступеней
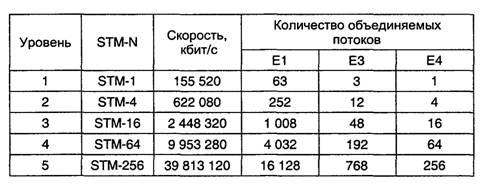
В таблице 1.1 указаны ступени СЦИ и соответствующие им скорости передачи.
2 Сигналы электросвязи и методы их описания
2.1 Уровни передач
Электросвязь предназначается для передачи сообщений посредством электрических сигналов. В общем случае сообщением является совокупность сведений о состоянии какого-либо материального объекта, поэтому в пункте передачи с помощью оконечного (абонентского) аппарата должен быть сформирован электрический сигнал, называемый первичным и соответствующий данному сообщению. В пункте приема абонентский аппарат осуществляет обратный процесс - в соответствии с принятым первичным сигналом формирует сообщение. Так, при передаче сигналов звукового вещания сообщением является изменение звукового давления, оконечным аппаратом передачи - микрофон, а приема - громкоговоритель.
Электрические сигналы количественно можно характеризовать мощностью, напряжением и (или) током. Однако в технике электросвязи принято пользоваться логарифмическими величинами (уровнями передачи), что позволяет существенно упростить многие расчеты, связанные с передачей сигналов. Уровни передачи, вычисленные посредством десятичных логарифмов, называются децибелами (дБ), а посредством натуральных -неперами (Нп). В настоящее время принято пользоваться децибелами.
Уровни передачи по мощности, напряжению и току определяются соответственно по формулам
![]()
где Рx, Ux, Ix -величины мощности, напряжения и тока в рассматриваемой точке х;
Рo, Uo, Io — величины, принятые за исходные.
Если известны значения сопротивлений Zx и Zo, на которых выделяются мощности Рx и Рo, то на основании известного соотношения
P= U2/[Z] =I2[Z] между уровнями передачи по мощности, напряжению и току могут быть найдены зависимости:

Очевидно, что при [Zx] = [Zo] уровни по мощности, напряжению и току равны между собой, т.е. pM=pH=pT .
Если за исходные величины мощности, напряжения и тока приняты соответственно Po = 1 мВт (мВ·А), Uo = 0,7746 В и Io = 1,291 мА, то вычисленные уровни называют абсолютными и обозначают дБм, дБн и дБт. Заметим, что указанные значения Uо и Io получены в предположении, что Po = 1 МВА выделяется на сопротивлении [Zo]=600 Ом.
Иногда в качестве исходных величин принимают значения Рн, Uн, Iн, установленные в начале тракта или в точке, принятой условно за начало. Тогда вычисленные уровни
![]()
называют относительными и обозначают дБом, дБон и дБот соответственно. Эти уровни широко используют при измерениях передаточных характеристик трактов, поскольку их значения оказываются численно равными усилению по мощности, напряжению или току участка тракта от начала до данной точки. Очевидно, что отрицательные значения уровней при этом будут соответствовать не усилению, а затуханию данного участка.
При нормировании величин сигналов и помех в каналах и трактах используется понятие точки нулевого относительного уровня по мощности (ТНОУ). Абсолютный уровень рмо, определенный в ТНОУ, обозначается как дБмО. Для перехода от уровня сигнала рмо к уровню по мощности рм в данной точке тракта пользуются соотношением рм = рмо + рм изм, где рм изм измерительный уровень по мощности в данной точке тракта.
2.2 Параметры и характеристики сигналов
Сигналы связи во времени меняют свои мгновенные значения, причем эти изменения могут быть предсказаны лишь с некоторой (меньше единицы) вероятностью. Таким образом, сигналы связи являются случайными процессами и их описание, естественно, должно осуществляться посредством методов, аналогичных методам описания случайных процессов.
Следует отметить, что постоянно проводятся работы по накоплению статистических материалов с целью совершенствования моделей сигналов. Параметры моделей приводятся в рекомендациях Международного союза электросвязи (МСЭ-Т).
Рассмотрим основные параметры сигналов как числовые характеристики моделированного случайного процесса u(t). При этом усреднение будем производить на интервале от - Т/2 до + Т/2, принимая усредненное значение как предел при Т, стремящемся к бесконечности. Заметим, что это справедливо лишь для модели сигналов, поскольку реализации сигналов конечны, т.е. заданы на некотором интервале времени от t1 до t2 .
Измерения также выполняются на конечных временных интервалах, что приводит к возникновению погрешности, которая оказывается тем больше, чем меньше интервал измерений. С учетом сказанного средние параметры сигналов нормируются по-разному на интервалах 1 с, 1 мин, 1 ч.
Электрический параметр - постоянная составляющая - это среднее значение случайного процесса:
Постоянная составляющая во времени неизменна, но ее величина случайна. Для многих сигналов связи постоянная составляющая равна нулю.
Электрический параметр - переменная составляющая - это центрированный случайный процесс:
![]()
Средняя мощность - это мощность переменной составляющей (постоянная составляющая при этом не учитывается, так как не несет информации):
Средняя мощность совпадает с дисперсией случайного процесса - мерой его разброса около среднего значения. Положительное значение:
![]()
называют эффективным или действующим напряжением сигнала.
Максимальная мощность Рмакс - это мощность синусоидального сигнала с амплитудой UM, которая превышается мгновенными значениями переменной составляющей сигнала u~(t) с определенной, достаточно малой вероятностью ε. Для различных видов сигналов ε принимают равной 10-2, 10-3, а иногда и 10-5.
Минимальная мощность Рмин чаще всего принимается равной допустимой среднеквадратической ошибке при приеме сигналов данного вида, которая устанавливается экспериментально. В свою очередь, среднеквадратическая ошибка обычно равна средней мощности допустимой флуктуационной помехи: Рмин = Рпср.
Иногда минимальная мощность сигнала принимается равной мощности синусоидального сигнала с амплитудой UМ мин , которая превышается мгновенными значениями переменной составляющей с определенной, достаточно большой вероятностью (1 - ε ). Обычно принимают (1 - ε) = 0,98.
Возможно использование логарифмических отношений вышеназванных величин: 10lg(Pмакс/Рср)= Qс -пикфактор сигнала;
10lg (Pмакс / Pср)=Dc динамический диапазон сигнала;
10lg (Рср /Рncp)=Апзс - помехозащищенность сигнала.
Две последние величины используются и для характеристик трактов передачи сигналов. При этом динамический диапазон тракта равен DT=10lg(Pнм/Рncp), где Рнм - неискаженная мощность на выходе тракта, помехозащищенность тракта -Азт=10lg(Pизм/Рncp),где Pизм - мощность измерительного сигнала на выходе. Тогда при передаче сигналов должны выполняться следующие неравенства:
DT> Dc; Азт> Апзс; Pср< Pизм .
2.3 Первичные сигналы электросвязи
В настоящее время системы электросвязи предназначены для передачи следующих первичных сигналов: телефонирования, звукового вещания, телеграфирования и передачи данных, факсимильных, телевизионного вещания. Рассмотрим основные параметры и характеристики этих сигналов.
Предварительно заметим, что сигналы телефонирования (ТФ) могут состоять из комбинации передаваемых в разные отрезки времени речевых сигналов и сигналов управления и взаимодействия (СУВ) систем коммутации. Последние можно рассматривать как разновидность сигналов передачи данных, поэтому при описании сигналов ТФ ограничимся параметрами и характеристиками речевых сигналов. Сигналы телевизионного вещания (ТВ) состоят из сигналов передачи подвижных изображений и звукового сопровождения. Последние передаются по отдельным каналам и ничем не отличаются от сигналов звукового вещания (ЗВ), которые будут рассмотрены самостоятельно. Поэтому можно считать, что сигналы ТВ являются сигналами передачи подвижных изображений.
Сигналы телефонирования представляют собой последовательности речевых импульсов, отделенных друг от друга паузами. Речевые импульсы соответствуют звукам речи, произносимым слитно, и весьма разнообразны по форме и амплитуде. длительности отдельных импульсов также отличаются друг от друга, но обычно они близки к 100...... 150 мс. Паузы между импульсами изменяются в значительно большем диапазоне: от нескольких миллисекунд (междуслоговые паузы) до нескольких минут или даже десятков минут (паузы при выслушивании ответа собеседника).
Частотный спектр речевого сигнала очень широк, однако экспериментально было установлено, что для передачи с достаточно высоким качеством (с удовлетворительной натуральностью и разборчивостью слогов - 90 % и фраз - 99 %) можно ограничиться полосой частот 0,3. ..З,4 кГц.

Рисунок 2.1- Речевой сигнал
Величина пикфактора сигнала при этом равна
![]()

Рисунок 2.2- Плотность вероятности динамических уровней телефонного сигнала и его динамический диапазон
Отношение утф = 10lg(Pтф/Ризм), дБм0 называется динамическим уровнем (волюмом) ТФ сигнала. В этом выражении Ризм - мощность измерительного сигнала в точке тракта, где проводится исследование. Согласно рекомендациям МСЭ-Т волюмы измеряются специальным прибором (волюмметром), обеспечивающим квадратичный закон суммирования колебаний различных частот, имеющим логарифмическую шкалу ( в децибелах) и постоянную времени (время интегрирования) Тн = 200мс.
Минимальным считается волюм, меньше которого волюмы появляются с вероятностью ε≤10-3. Воспользовавшись таблицами интеграла вероятности, определим минимальную величину волюма, которая оказывается равной
![]()
При определении величины флуктуационной помехи, действующей на входе оконечного аппарата, ее приводят к эффективно воздействующей на органы слуха взвешенной помехе. Суть «взвешивания» заключается в том, что на входе измерительного прибора устанавливается амплитудный корректор, частотная характеристика передачи которого повторяет среднестатистическую характеристику чувствительности системы «телефонный аппарат — слуховой аппарат человека». Очевидно, что взвешенное значение помехи будет меньше невзвешенного из-за меньшей чувствительности указанной системы на краях частотного диапазона, а значит, и большего затухания корректора на этих же частотах. Снижение действующего напряжения равномерно распределенной по спектру помехи определяется псофометрическим коэффициентом К пс, равным 0,75 для полосы частот 0,3 … 3,4 Гц.
Сигналы звукового вещания (ЗВ). Сигналы звукового вещания (ЗВ) по своему характеру близки к речевым телефонным сигналам, поэтому их отличия от последних носят, в основном, количественный характер. Частотный спектр сигналов ЗВ ограничивают без заметного снижения качества передачи полосой частот 0,03... 15 кГц для каналов высшего класса и полосой частот 0,05...10 кГц для каналов первого класса. Сигналы ЗВ по сравнению с телефонными имеют значительно меньше пауз, а энергия отдельных импульсов, особенно музыкальных, существенно превышает энергию речевых импульсов сигналов ТФ. Поэтому средняя мощность сигналов ЗВ намного больше средней мощности ТФ сигналов. Нормируются среднесекундная, среднеминутная и среднечасовая мощности Рзв ср равные соответственно 4500, 2230 и 923 мкВт0. Максимальная мощность определяется при вероятности превышения ε= 0,02 и составляет 8000 мкВт0. Минимальная мощность рассчитывается при вероятности превышения (1 - ε ) = 0,98. Ее значения различны для тех или иных видов сигналов и дают значения динамического диапазона Dзв сигналов ЗВ, от 35 -до 65 (дБ).
Взвешенная флуктуационная помеха на входе оконечного аппарата ЗВ не должна превышать 16000 пВт0п. Поскольку спектр помехи в каналах ЗВ шире, псофометрический коэффициент для них оказывается меньше. Так, для канала первого класса он равен 0,5, т.е. мощность невзвешенной помехи может достигать 16000/0,52=64000 пВт0, следовательно, помехозащищенность сигналов ЗВ должна быть не хуже
![]()
Таким образом, потенциальная информационная емкость сигнала ЗВ первого класса может достигать
![]()
Факсимильные сигналы (сигналы передачи неподвижных изображений) получаются в результате преобразования светового потока, отражаемого элементами изображения, в электрические сигналы. Падающий световой поток перемещается по изображению в определенной последовательности (например, по принципу строчной развертки). В такой же последовательности в приемном устройстве перемещается элемент, воздействующий в соответствии с принимаемыми сигналами на носитель записи и окрашивающий соответственно его участки. Так, на передаче световое пятно можно перемещать по передаваемому рисунку, а отраженный поток воспринимать фотоэлементом, на выходе которого будет получаться электрический сигнал. На приеме этот сигнал возбуждает светодиод. Перемещая сфокусированный световой поток синфазно с потоком на передаче по фоточувствительной бумаге, получаем фотокопию передаваемого изображения.
При передаче штриховых изображений (состоящих из черных и белых элементов, например газетной полосы) факсимильный сигнал (ФС) состоит из униполярных импульсов различной длительности, но одинаковой амплитуды. Предполагается, что полоса частот такого сигнала находится в пределах 0.. .Fр, причем Fр - частота рисунка -связана с длительностью самого короткого импульса τи соотношением Fр = 1/2 τи. В свою очередь, τи определяется диаметром светового пятна dc и скоростью развертки Vp(скорость перемещения светового пятна по рисунку): τи = dc/ Vp . При передаче документов выбирают dc = 0,15 мм и Vp <440 мм/с, тогда τи = 0,34 мс, а Fр = 1500 Гц. При передаче газетных полос dc <0,06 мм, а Vp< 30 м/с. Частота при этом достигает 250 кГц.
Необходимая помехозащищенность полутоновых сигналов, как и штриховых, А3фс = 35 дБ. При этом потенциальная информационная емкость полутоновых сигналов Vфсп макс = 2Fp log2I = 2Fp log216 = 8Fp бит/с, т.е. в 4 раза больше, чем штриховых.
Какое бы изображение ни обрабатывалось, сигнал на выходе фотоэлектрического преобразователя является аналоговым, т.е. непрерывным по уровню и времени видеосигналом. В аналоговых аппаратах факсимильной связи (аппараты группы 1 и 2) этот сигнал после усиления переносится в область высоких частот и непосредственно передается в линию связи.
В цифровых факсимильных системах аналоговый сигнал подвергается квантованию, дискретизации по времени и кодированию. После этих преобразований цифровой сигнал по своей структуре ничем не отличается от аналогичных сигналов систем передачи данных. Современные факсимильные аппараты , как правило, цифровые.
Цифровые факсимильные аппараты (аппараты группы 3) имеют обычно плоскостную развертку и электронное анализирующее устройство на приборах с зарядовой связью (ПЭС). Обычно используется однострочная линейка ПЭС на 2048 элементов. Запись изображения производится многоэлектродными головками на электростатическую или электротермическую бумагу.
Телевизионные сигналы. Первичные сигналы телевизионного вещания (ТВ) состоят из суммы сигналов яркости (изображения), аналогичных полутоновым сигналам ФС, сигналов цветности и так называемой «синхросмеси» - комбинации импульсов синхронизации строк и полукадров и импульсов гашения обратного хода луча. Частота рисунка Fp сигналов яркости может быть подсчитана, исходя из того, что число элементов изображения в кадре равно (4/3)/m, где m = 625 - число строк в кадре принятой системы ЦТ СЕКАМ, а 4/3 - отношение размеров кадра по горизонтали и вертикали. Учитывая, что в секунду передается 25 кадров (50 полукадров, состоящих поочередно из четных и нечетных строк изображения), имеем fp= (4/3)m2·25/2 = 6,5 МГц. Однако практически вся энергия сигналов яркости сосредоточена в диапазоне 0... 1,5 МГц.
Защищенность сигналов яркости от флуктуационной помехи должна быть не хуже 48 дБ. Поскольку высокие частоты сигнала соответствуют мелким деталям изображения, МСЭ-Т рекомендует при оценке помехи пользоваться взвешивающим фильтром с падающей амплитудно-частотной характеристикой (АЧХ). Уровень псофометрической помехи ниже уровня помехи с равномерным спектральным распределением на 9 дБ (псофометрический коэффициент равен Кпс = 2,82, т.е. фактическая помехозащищенность равна Апз тв = 57 дБ).
Число градаций яркости составляет 100, откуда Dтв = 40 дБ. Пикфактор сигнала, как было показано при рассмотрении полутонового ФС сигнала, не превысит 4,8 дБ, а потенциальный информационный объем .Vтвмакс = 2·6,5·106·3,32lg100 = 86 Мбит/с.
Сигналы цветности в этой системе представляют собой две поднесущие (4406,25 и 4250,00 кГц), модулированные по частоте двумя чередующимися от строки к строке цветоразностными сигналами. Амплитуда суммы поднесущих составляет 23% от размаха сигнала яркости. Частотный спектр сигналов цветности совмещается с верхней частью спектра сигнала яркости. Складываясь с сигналами яркости, сигналы цветности вызывают периодическое изменение яркости свечения экрана, что, однако, из-за инерционности зрения не влияет на восприятие изображения.
Нулевое напряжение сигнала яркости соответствует уровню черного, а максимальное -уровню белого. Импульсы синхронизации в этом случае передают отрицательным напряжением («чернее черного»), чтобы они не воспроизводились на приемном экране. Принято, что размах полного ТВ сигнала на выходе телецентра составляет 1В на нагрузке 75 Ом. Сигналы передачи дискретной информации. Сигналы телеграфирования и передачи данных (ТП) чаще всего представляют последовательности униполярных или биполярных импульсов постоянной амплитуды, при этом положительный импульс обычно соответствует передаваемому знаку «1» , а пропуск импульса или отрицательный - знаку «0». Частота следования «1» и «0» называется тактовой частотой Fт. Численно Fт соответствует скорости передачи информации в бодах (Бод), а в данном случае (два разрешенных значения «1» и «0») -и скорости передачи в битах в секунду (бит/с).
Условно различают низкоскоростную (до 200 Бод), среднескоростную (300...1200 Бод) и высокоскоростную (свыше 1200 Бод) передачу данных. Поскольку каждый передаваемый импульс занимает полностью тактовый интервал, его длительность находится в пределах до 5 мс при низкоскоростной, от 3,3 до 0,8 мс при среднескоростной и менее 0,8 мс при высокоскоростной передачах.
3 Аналогово-цифровое и цифро-аналоговое преобразование сигналов
Аналого-цифровое преобразование (АЦП) сигналов является одной из важнейших составляющих цифровых телекоммуникационных систем. Аналого-цифровое преобразование обычно состоит из нескольких последовательных операций, как показано на рисунке 3.1. Эти операции таковы - дискретизация - представление непрерывного во времени сигнала рядом периодических дискретных значений. Возможность такого представления основана на известной теореме В.А. Котельникова, по которой функция, спектр которой сосредоточен в полосе частот до ωв, полностью характеризуется своими мгновенными значениями, отсчитанными через интервалы времени ∆t = π/ωв. Дискретизация нужна для временного разделения каналов, кроме того, дискретизация позволяет применять синхронные микросхемы, работа которых происходит более четко.
Квантование - округление мгновенных значений сигнала до ближайших разрешенных значений. Это важнейшая операция АЦП, которая, собственно, и превращает аналоговый сигнал в цифровой . Квантование неизбежно сопровождается ошибкой квантования, не более шага квантования, т.е. расстояния между ближайшими разрешенными значениями. Уменьшая это расстояние, приходим к увеличению числа разрешенных значений и, как следствие, к необходимости повышать объем передаваемой информации при прочих равных условиях, например, за счет повышения скорости передачи. В оборудовании телекоммуникационных систем важнейшая операция квантования практически всегда совмещается с последующей - кодированием.

Рисунок 3.1- Аналого-цифровое преобразование сигнала
В цифровых телекоммуникационных системах кодирование понимается в узком смысле, как переход от кода с высоким основанием к коду с низким основанием. Т.е. мгновенные значения, которые могут принимать достаточно много разрешенных значений, заменяются комбинациями импульсов (кодовыми группами, состоящими, например, из 8 импульсов), которые имеют мало разрешенных значений (минимум два). Это повышает помехоустойчивость сигнала и упрощает его обработку логическими устройствами. Кроме указанных трех операций, в цифровых телекоммуникационных системах осуществляется также мультиплексирование-объединение нескольких потоков (компонентных) в групповой поток (агрегатный).
В ЦТС прежних поколений объединение сигналов производили после дискретизации с тем, чтобы относительно сложный узел - кодер сделать групповым. В настоящее время, с повышением уровня цифровизации сетей связи, появилась тенденция выноса оборудования АЦП к абоненту, т.е., в конечном счете, получать групповой сигнал в результате объединения индивидуальных цифровых сигналов. Следует заметить, что операция мультиплексирования широко применяется в ЦТС и вне связи с аналого-цифровым преобразованием.
Очевидно, что операциям АЦП на передаче должны соответствовать обратные операции на приеме. Действительно, приходящий агрегатный поток демультиплексируется - разделяется на компонентные потоки и декодируется. В результате декодирования восстанавливаются мгновенные значения сигнала, которые после прохождения фильтра нижних частот с частотой среза wв, превращаются в непрерывный исходный сигнал. Заметим, что восстановленный сигнал всегда отличается от исходного из-за операции квантования (сигнал восстанавливается не точно по исходным мгновенным значениям, а по округленным до разрешенных). Однако, уменьшая шаги квантования, теоретически можно достигнуть сколь угодно малого отличия принятого сигнала от переданного.
Рассмотрим подробнее операции аналого-цифрового преобразования. Дискретизация сигнала во времени реализуется посредством амплитудно-импульсной модуляции — модуляции импульсного переносчика (АИМ). В качестве переносчика используется последовательность прямоугольных импульсов с более или менее стабильной частотой следования f0 . То, что в качестве переносчика применяются последовательности прямоугольных импульсов, определено простотой генерации, и обработки таких последовательностей и не имеет принципиального характера.
Реальные импульсы имеют конечную длительность τu. Удобное для характеристики таких последовательностей использовать коэффициент скважности (скважность)Кс к=То/τu, где Тo - период следования импульсов То = 1/ f0 . По Фурье спектральный состав такой последовательности равен
Как следует из формулы, спектр переносчика состоит из постоянной составляющей и гармоник частоты f0, причем гармоники с номерами, кратными kck отсутствуют.
Простейший амплитудно-импульсный модулятор представляет собой ключ, срабатывающий при прохождении импульса переносчика и пропускающий при этом сигнал на свой выход (см. рисунок 3.2,а, б). Такая амплитудно-импульсная модуляция называется АИМ-1 (АИМ первого рода). При АИМ-1 возникают проблемы дальнейшей обработки сигнала из-за неопределенности величины амплитуды импульса. Поэтому применяется АИМ-2 (АИМ второго рода), при которой отсчет берется в какой-либо одной точке прохождения импульса, а затем это значение удерживается в течение некоторого времени. На рисунке 3.2, в показан сигнал АИМ-2, у которого амплитуды импульсов соответствуют мгновенным значениям исходного сигнала, взятых в моменты возникновения импульсов переносчика. На этом же рисунке длительности импульсов равны длительностям импульсов переносчика, но, в общем случае, как это будет показано далее, могут и отличаться от них.
Для определения спектра АИМ сигнала воспользуемся методом суперпозиции, считая, что процесс модуляции линейный, В этом случае для определения спектра достаточно перемножить одну из спектральных составляющих модулирующего сигнала со спектром переносчика и распространить результат на всю сумму спектральных составляющих сигнала.

Рисунок 3.2 - Виды амплитудно-импульсной модуляции
Такой преобразователь может состоять из электронного ключа К, накопительного конденсатора С, входного усилителя с малым выходным сопротивлением (Rвых→0) и выходного усилителя с высоким входным сопротивлением (Rвх →∞). При прохождении очередного импульса АИМ-1 осуществляется его стробирование в течение короткого времени τстр , ключ К преобразователя замыкается, и конденсатор С заряжается до напряжения, которое имел импульс АИМ-1 к моменту размыкания ключа, далее это напряжение удерживается неизменным до момента следующего стробирования, когда происходит перезаряд конденсатора до значения следующего отсчета и так далее. Таким образом, формируется последовательность импульсов АИМ-2 с плоскими вершинами. Постоянная времени заряда конденсатора τз=RвыхС должна быть возможно меньше, иначе из-за неполного перезаряда будут возникать взаимные влияния между соседними импульсами. В случае, если сигнал АИМ-1 групповой, эти влияния будут приводить к внятным переходным помехам между каналами. Постоянная времени разряда, равная τр= RвхС, напротив, выбирается достаточно большой, чтобы конденсатор не успел заметно разрядиться за период между моментами стробирования. Это условие гарантирует плоскую вершину импульса АИМ-2, что необходимо для нормального проведения последующей операции кодирования.
В процессе передачи сигнала происходит смещение принимаемых импульсов со своих тактовых точек (медленные фазовые флуктуации — вандер). Это приводит к появлению ошибки при восстановлении сигнала на приеме.
Квантование сигнала по уровню является главной операцией аналого-цифрового преобразования сигнала и заключается в округлении его мгновенных значений до ближайших разрешенных, как это показано на рисунке 3.3.
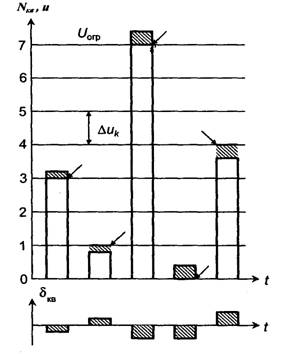
Рисунок 3.3 - Квантование сигнала по уровню
На нем показан АИМ сигнал, по вертикали отмечены восемь уровней квантования (с 0-го по 7-й). Расстояния между уровнями одинаковые, т.е. имеет место равномерное или линейное квантование, и равны шагу квантования ∆uk. Стрелками на рисунке отмечены значения, до которых округляются амплитуды исходных импульсов. Напряжение 7-го уровня соответствует напряжению ограничения Uогр, амплитуда 4-го импульса равна нулю. Очевидно, при квантовании сигнала возникают ошибки δкв (затемненные поля на рисунке), величина которых случайна, имеет равномерное распределение и не превышает значения ∆uk/2. Таким образом, сигнал после квантования представляет собой сумму исходного сигнала и сигнала ошибки (показанные на нижнем графике рисунке 3.3), который воспринимается как флуктуационный шум.
Анализ характеристики защищенности от шумов квантования показывает, что при заданной помехозащищенности число разрядов кодирования можно было бы уменьшить, если уменьшить наклон характеристики Аэкв. Это достигается в результате применения неравномерного (нелинейного) квантования, т.е. уменьшения величины шагов квантования для малых мгновенных значений сигнала за счет увеличения шагов для больших значений. Применение неравномерного квантования эквивалентно компрессированию (сжатию) динамического диапазона сигнала. Во избежание нелинейных искажений на приеме должна осуществляться обратная операция - экспандирование (расширение) динамического диапазона.
Очевидно, условием постоянства защищенности от шумов квантования для всех уровней сигнала будет постоянство относительных приращений сигнала во всем диапазоне его изменений, т.е.
![]()
где х и у - нормированные значения напряжений входного и выходного сигналов соответственно в устройстве квантования. Решая это дифференциальное уравнение, получаем
y=c1Inx+c2=c1In(μx) .
Реализация такой характеристики для заданных начальных условий невозможна,
поскольку логарифм нуля не существует. Поэтому реализуются квазилогарифмические
А- и μ-характеристики. Квазилогарифмическая А-характеристика описывается
следующими выражениями
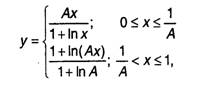 (3.1)
(3.1)
а μ -характеристика выражением
![]() (3.2)
(3.2)
Коды шагов внутри любого сегмента одинаковы и соответствуют натуральному несимметричному коду (0-й шаг имеет код 0000, 1-й - 0001 ,...15-й -1111). В соответствии с этой характеристикой 8-и разрядное кодовое слово мгновенного значения сигнала имеет структуру РХYZАВСD. В этой структуре Р - старший разряд указывает полярность сигнала («1» -положительная, «0» -отрицательная), ХYZ - код номера сегмента Nc а АВСD -код номера шага внутри сегмента Nш
Таблица 3.1
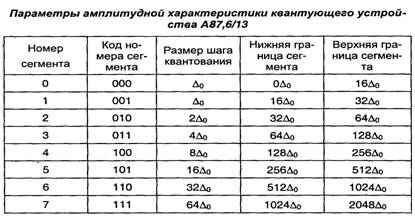
Верхняя граница верхнего сегмента соответствует максимальному напряжению сигнала - напряжению ограничения Uогр . Отсюда минимальный шаг квантования равен ∆0 = Uогр·2-11,а шаг квантования в сегментах 2-7∆i= 2i-1 , где i - номер сегмента. Введем переменную х = Uвх/ Uогр. Тогда выражение для защищенности от шумов квантования в двух первых сегментах (дБ) будет иметь вид
 (3.3)
(3.3)
Кодирование сигналов.Аналого-цифровое преобразование завершается операцией кодирования, которое в данном случае заключается в преобразовании уровней отсчетов непрерывных сигналов в кодовые комбинации. При этом обычно используются равномерные двоичные коды, в которых число кодовых символов или разрядов кодовых комбинаций равно m, а каждый символ может принимать значение 0 или 1. Применяются следующие равномерные двоичные коды: натуральный, симметричный и рефлексный.
При натуральном двоичном кодировании структура кодовой группы определяется номером шага квантования Nкв ,записанным в двоичной системе исчисления с помощью полинома
![]()
где аi- кодовый символ i-го разряда, принимающий значение 0 или 1, 2m-i - вес I-го разряда.
Натуральный двоичный код применяется для кодирования униполярных импульсов. В качестве примера на рисунке 3.4,а приведена кодовая таблица для натурального двоичного четырехразрядного кода. Недостаток натурального двоичного кода состоит в том, что кодовые группы, соответствующие соседним шагам квантования, могут различаться во многих разрядах кода. Поэтому при изменении значения отсчета во время кодирования может произойти переход от одного шага квантования к другому, сильно отличающемуся от него. Такой переход наиболее вероятен в центральной части амплитудной характеристики. Например, если после начала кодирования на седьмом шаге мгновенное значение выросло до восьмого, то вместо кодовой группы 0111 будет передана группа 0000, что будет соответствовать передаче нулевого уровня.
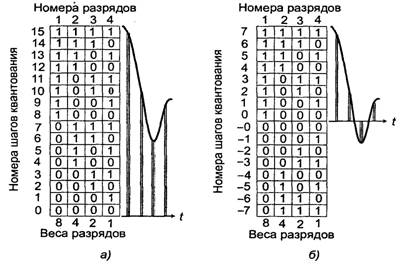
Рисунок 3.4 - Разновидности двоичного кода: а-натурального, б-натурального
симметричного
Биполярным сигналам, например, речевым, свойственна максимальная плотность вероятности малых мгновенных значений. Для таких сигналов разряды кодовых групп соседних уровней в центре амплитудной характеристики квантования должны отличаться в минимальном числе разрядов. С этой целью применяют натуральный симметричный двоичный код (см. рисунок 3.4,б). При кодировании симметричным кодом символ первого разряда определяется знаком отсчета, а символы остальных разрядов - абсолютным значением отсчета, выраженным в двоичной системе исчисления. Для таких сигналов, как широкополосные телевизионные, различие символов в большом числе разрядов кодовых групп любых соседних шагов квантования нежелательно, так как для этих сигналов ошибки кодирования одинаково опасны для всех мгновенных значений. Для кодирования таких сигналов используется рефлексный двоичный код (код Грея), в котором кодовые группы любых соседних уровней квантования отличаются лишь в одном разряде. Таблица рефлексного четырехразрядного кода приведена на рисунке 3.5. На приемном конце принятые кодовые группы декодируются, в результате чего восстанавливаются мгновенные значения передаваемого сигнала.
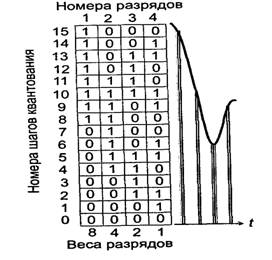
Рисунок 3.5 - Рефлексный код
Затем последовательность импульсов АИМ-2 демодулируется с помощью фильтра нижних частот. Кодеры и декодеры, предназначенные для аналого-цифрового и цифро-аналогового преобразования, в совокупности называют кодеками. Из вышеизложенного следует, что, во-первых, важнейшая операция аналого-цифрового преобразования сигнала: квантование - технически сочетается с операцией кодирования, и, во-вторых, для нормальной работы кодера на его вход должно подаваться неизменное значение сигнала в течение цикла его обработки. Последнее достигается при подаче на вход кодера сигналов АИМ-2.
3.1 Структура оконечной станции
Рассмотрим структуру оконечной станции первичной ЦСП на примере широко распространенной на телекоммуникационной сети системы передачи ИКМ-З0. Это оборудование относится к образцам аппаратуры прежних поколений, но ее построение позволяет наглядно продемонстрировать применение на практике рассмотренных ранее принципов преобразования сигнала.
Упрощенная функциональная схема станции показана на рисунке 3.6.
Сигналы ТЧ поступают на вход/выход (точка а) приемопередатчика ПП и через дифференциальную систему ДС, разделяющую тракты приема и передачи, на вход передающей части ПП (точка б). Передающая часть ПП состоит из ограничителя амплитуд, защищающего дальнейшие узлы оборудования от импульсных помех, активного фильтра нижних частот и амплитудно-импульсного модулятора. Фильтр нижних частот ограничивает полосу сигнала частотой 3,4 кГц, что обеспечивает безыскаженное восстановление АИМ сигнала на приеме. Амплитудно-импульсный модулятор (электронный ключ) дискретизирует поступающий сигнал с частотой 8 кГц.
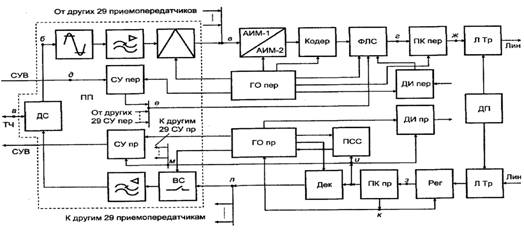
Рисунок 3.6 - Функциональная схема оконечной станции первичной ЦТС
Его работой управляет соответствующая номеру канала последовательность канальных импульсов, поступающая от генераторного оборудования передачи (ГО пер). АИМ-сигналы с выходов всех тридцати ПП, смещенные друг относительно друга во времени согласно принципу временного разделения каналов, объединяются в групповой сигнал в формате АИМ-1 и поступают на вход преобразователя АИМ-1/АИМ-2 (точка в). Формат АИМ-2 (плоские вершины импульсов) необходим для удержания неизменным напряжения, соответствующего тому или иному мгновенному значению аналогового сигнала на время его обработки кодером (Код).
Кодер заменяет импульсы с амплитудами, равными мгновенным значениям сигналов ТЧ, канальными сигналами - восьмиразрядными кодовыми комбинациями (кодовыми словами), которые поступают на формирователь линейного сигнала ФЛС. ФЛС формирует цикл передачи, в котором помимо 30-и канальных сигналов содержатся сервисные сигналы, сигналы дискретной информации (ДИ), поступающие от передатчика ДИ пер, а также сигналы управления и взаимодействия (СУВ) телефонных каналов (точка г).
Исходные сигналы СУВ данного канала поступают от АТС на передающую часть согласующего устройства (СУ пер) по сигнальной цепи (точка д). Здесь они дискретизируются с частотой 500 Гц, объединяются по принципу ВРК (точка е) и поступают на ФЛС, где также вводятся в линейный сигнал. С выхода ФЛС линейный сигнал (точка г) поступает на преобразователь кода передачи (ПК пер). Преобразователь кода предназначен для преобразования натурального симметричного кода в линейный, принятый в данной ЦТС Далее сигнал через линейный трансформатор Ле Тр, позволяющий ввести в линию ток дистанционного питания (ДП), поступает в кабель. Точка на выходе ПКпер (ж) является точкой начала первичного цифрового тракта (относится к стандартному интерфейсу сетевого узла, т.е. в ней нормируются физические, электрические и логические параметры соединения).
Рассмотрим приемную часть оконечной станции. Сигнал, пришедший с линии, через линейный трансформатор поступает на регенератор (Рег), который осуществляет регенерацию сигнала — восстановление его формы и временных соотношений. Восстановленный сигнал поступает на преобразователь кода (ПК пр), в котором происходит преобразование линейного кода сигнала в натуральный симметричный. Точка (з) перед ПК пр является точкой окончания первичного сетевого тракта и так же, как точка начала (точка ж) относится к стандартному интерфейсу сетевого узла. В структуру ПК пр входит также выделитель сигнала тактовой частоты (ВТЧ). Выделенный из линейного сигнала сигнал тактовой частоты (точка к) поступает на регенератор, в котором он управляет работой решающего устройства, и на приемное генераторное оборудование ГО пр, в котором он используется для тактовой синхронизации задающего генератора ЗГ.
К выходу ПКпр (точка и) подключены: приемник синхросигналов ПСС, который обеспечивает работу системы цикловой и сверхцикловой синхронизации; декодер (Дек), который преобразует восьмиразрядные канальные сигналы ИКМ в АИМ сигналы: приемные части согласующих устройств СУпр, которые выделяют и преобразуют в исходную форму сигналы управления и взаимодействия соответствующих каналов ТЧ и направляют их на АТС; приемник дискретной информации (ДИ пр), который выделяет и преобразует к исходному виду сигналы ДИ.
Все перечисленные устройства выделяют соответствующие сигналы из линейного сигнала по принципу ВРК, согласно импульсным последовательностям, поступающим от приемного генераторного оборудования (ГОпр). К выходу декодера Дек (точка л) подключены приемные части тридцати приемопередатчиков ПП, которые посредством временных селекторов ВС (ключей), управляемых ГОпр, выделяют соответствующие АИМ канальные сигналы. Проходя через активные фильтры нижних частот, эти сигналы преобразуются в непрерывные сигналы ТЧ. В современных первичных ЦТС в приемопередатчик, называемый абонентской линейной платой, входят также устройства кодирования и декодирования. Первичный цифровой поток получается в этом случае путем объединения канальных цифровых потоков, поступающих от абонентских линейных плат, и сервисных сигналов системы передачи. Абонентские линейные платы могут иметь различные модификации, в зависимости от вида абонентского терминала.
3.2 Структура первичного цифрового потока
На выходе первичной ЦТС получается первичный цифровой поток со скоростью передачи 2048 кбит/с. Первичный цифровой поток в данном случае является структурированным, т.е. в нем можно выделить периодически повторяющиеся характерные структуры. Заметим, что в некоторых телекоммуникационных устройствах используются и неструктурированные первичные цифровые потоки. Структура цифрового потока на выходе первичной ЦТС показана на рисунке 3.7. Прежде всего поток разделяется на сверхциклы передачи (СЦ), длительности которых равны двум миллисекундам. Сверхцикл объединяет 16 циклов передачи с нулевого (Ц0) по пятнадцатый (Ц15), длительность каждого цикла 125 мкс. Частота следования циклов составляет 1/125·10-6 = 8·103 = 8 кГц. Поскольку в цикле передается кодовая комбинация каждого канала, частота следования циклов совпадает с частотой дискретизации канальных сигналов, которая также равна 8 кГц. Цикл передачи содержит 32 канальных интервала с нулевого (КИО) по тридцать первый (КИ31).
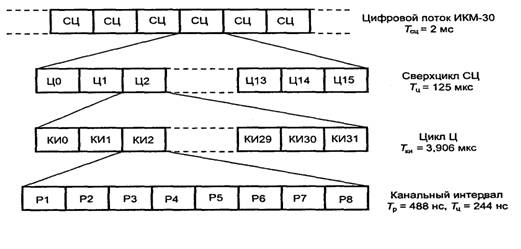
Рисунок 3.7 Структура первичного цифрового потока
Каждый канальный интервал занимает восьмиразрядное кодовое слово (разряды с Р1 по Р8). Частота следования разрядных интервалов и, следовательно, битов информации в первичном потоке составляет 8·103·32·8 = 2048·103 бит/с (2,048 Мбит/с). В точке стыка сетевого тракта единицы передаются прямоугольными импульсами, занимающими половину разрядного (тактового) интервала, а нули - пробелами (отсутствием импульса в разрядном интервале).
Вариант РСМ30 является вариантом с канально-связанной (внутриканальной) сигнализацией. Именно такой вариант цикла используется в ЦТС. В канальном интервале КИО в четных циклах передается цикловой синхросигнал (ЦС). Шесть позиций ЦС в нечетных циклах свободны (обычно на свободных позициях передаются «1»), на одной передается извещение на дальний конец о потере ЦС. Позиция 0З, передача результата проверки остаточного затухания, использовалась в ЦСП прежних выпусков. В канальном интервале КИ16 в цикле Ц0 передается сверхцикловой синхросигнал. В последующих циклах сверхцикла поочередно передаются сигналы управления и взаимодействия (СУВ) всех тридцати каналов ТЧ, для чего для каждого канала ТЧ организуются по два сигнальных канала СК1 и СК2. В Ц1 передаются СУВ 1-го и 16-го каналов ТЧ, в Ц2 — 2-го и 17-го и так далее. В Ц1 5 передаются СУВ 15-го и 30- каналов ТЧ. Таким образом, в данном варианте канальные интервалы КИ0 и КИ16 являются служебными, а остальные 30 (КИ1 — КИ15 и КИ17 — КИ31) служат для организации информационных каналов (каналов ТЧ).
3.3 Функциональная схема генераторного оборудования
Генераторное оборудование (ГО) предназначено для формирования и распределения во времени импульсных последовательностей, управляющих работой всех узлов аппаратуры и служащих для формирования/расформирования первичного цифрового потока.
Генераторное оборудование передающей и приемной частей аппаратуры независимо и имеет структурную схему, показанную на рисунке 3.8. Задающий генератор ЗГ формирует тактовые импульсы с частотой следования ft= 2048 кГц. Последовательность тактовых импульсов СТРОБ подается практически на все узлы аппаратуры, поскольку они обычно выполняются на цифровых микросхемах, работающих в синхронном режиме (переход схемы из одного состояния в другое возможен в таких схемах только при подаче на специальный синхронизирующий вход схемы тактового импульса).
Разрядный распределитель импульсов РРИ из тактовой последовательности формирует m= 8 разрядных последовательностей Р1 . . . Р8 с частотами fp= ft / m =2048/8 = 256 кГц и сдвинутыми друг относительно друга на один тактовый интервал. Разрядные последовательности используются для управления групповыми устройствами. Канальный распределитель импульсов КРИ формирует N= 32 канальных последовательности КИ0,.. .КИ31, с частотами fk=( ft / m)/N =2048/8/32 = 8 кГц., которые управляют канальными устройствами. Цикловой распределитель ЦРИ формирует последовательности с частотами 8/16 = 0,5 кГц, которые управляют согласующими устройствами СУВ, а также используются для формирования циклового и сверхциклового синхросигналов.
В современной аппаратуре часть функций распределителей импульсных последовательностей передается в исполнительные функциональные узлы.
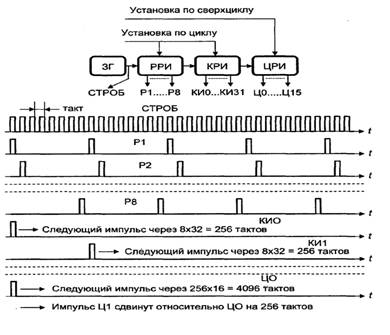
Рисунок 3.8 - Структурная схема генераторного оборудования
Так, например, увеличив число управляющих входов в ключах канальных амплитудно-импульсных модуляторов и временных селекторах, можно сократить число необходимых импульсных последовательностей с 32-х до 8-и. В этом случае окончательное формирование импульса срабатывания ключа происходит на дешифраторе, правда, очень простом. Такое перераспределение функций уменьшает количество соединительных проводников в аппаратуре и упрощает схему ГО. В конечном счете, это повышает надежность аппаратуры и улучшает технологию его изготовления.
Распределители импульсных последовательностей генераторного оборудования имеют входы установки по циклу (сверхциклу). При подаче на эти входы единицы от приемника циклового (сверхциклового) синхросигнала распределители устанавливаются в исходное состояние, соответствующее началу очередного цикла (сверхцикла). В генераторном оборудовании используются распределители двух типов: с логической обратной связью (ЛОС) и с дешифратором. Первые используются обычно в тех случаях, когда необходимо получить весь ряд импульсных последовательностей, например, восемь разрядных последовательностей из восьми возможных. Вторые используются тогда, когда требуется получить лишь некоторые из возможных последовательностей.
3.4 Универсальная система первичного мультиплексирования
На современных сетях первичные цифровые телекоммуникационные
системы находят широкое применение. В частности, они используются как элементы универсальных систем первичного мультиплексирования. Основными элементами таких систем являются кроссконнекторы основных цифровых каналов (КК ОЦК) и первичные мультиплексоры (ПМ), которые называют также гибкими мультиплексорами, чтобы подчеркнуть их универсальность. На рисунке 3.9 показаны названные элементы системы; комбинация первичных мультиплексоров и кроссконнектора представляет собой универсальный сетевой узел. Сигналы от абонентов поступают на линейные платы ЛП первичных мультиплексоров ПМ, преобразуются в сигналы основных цифровых каналов ОЦК (64 кбит/с) и объединяются в стандартные первичные цифровые потоки (2 Мбит/с). Первичные цифровые потоки поступают на кроссконнектор КК ОЦК, который может осуществлять коммутацию, как первичных потоков, так и их составляющих - основных цифровых каналов (ОЦК).

Рисунок 3.9 - Универсальное система первичного мультиплексирования
Соединения в кроссконнекторе устанавливаются как между портами первичных потоков, так и временными интервалами внутри первичного потока. Кроме того, кроссконнектор обычно может обеспечивать конференц-связь и многоточечное соединение абонентов. Кроссконнектор поддерживает различные способы передачи сигналов взаимодействия и управления. Структурная схема КК ОЦК представлена на рисунке 3.10. В его состав входят: центральный блок, платы портов 2 Мбит/с (ПП), блок интерфейсов управления и системная шина. Основное назначение центрального блока: коммутация сигналов, подготовленных портами 2 Мбит/с и переданных на коммутационную матрицу блока по системной шине. Кроме этого, центральный блок имеет в своем составе генераторное оборудование, обеспечивающее необходимыми сигналами все системы кроссконнектора. Генераторное оборудование может быть синхронизированно от внутреннего генератора, от внешнего источника и от сигнала, выделенного из потока 2 Мбит/с. Синхросигнал от генераторного оборудования выводится на внешний выход. Кроме интерфейса синхросигнала, центральный блок имеет обычно внешние интерфейсы для передачи сервисной информации. Во-первых, это интерфейс встроенного канала управления (ВКУ), для которого занимается один из информационных ОЦК.
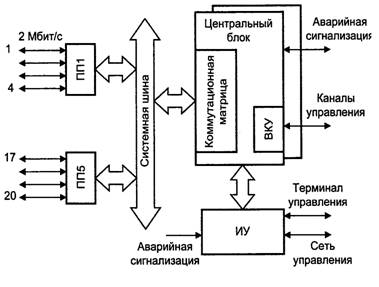
Рисунок 3.10 - Структурная схема кроссконектора КК ОЦК
Во-вторых, это интерфейсы каналов, организуемых на тех позициях циклов первичных потоков, которые предназначены для передачи извещения о срочной и отложенной авариях. В третьих, это интерфейсы каналов, образуемых на позициях цикла, зарезервированных для нужд национальной сети. Обычно в состав центрального блока входит также блок питания КК ОЦК. Как правило, с целью повышения надежности центральный блок дублируется (100% «горячий» резерв). Помимо системной шины в состав кроссконнектора входит также шина контроля, через которую центральный блок связан с блоком поддержки интерфейсов управления (ИУ). Блок ИУ обеспечивает связь кроссконнектора с внешней сетью управления телекоммуникациями ТМN. К блоку ИУ подключается также терминал оператора. Процессор, который установлен в центральном блоке, контролирует работу всех блоков кроссконнектора, выводит аварийные сигналы и регистрирует параметры качества принимаемых сигналов.
Каждая плата портов ПП может содержать несколько портов трактов 2 Мбит/с. Каждый порт обеспечивает все основные функции, обеспечивающие параметры стандартного интерфейса (точки стыка) первичного цифрового тракта. К этим функциям относятся:
- преобразование кода сигнала из натурального в линейный и обратно;
- выделение тактовых сигналов из линейного;
- цикловая и сверхцикловая (при необходимости) синхронизация;
- контроль появления ошибок методом СRС-4.
Структурная схема первичного мультиплексора ПМ представлена на рисунке 3.11. Основными узлами ПМ являются: центральный блок, линейные платы (ЛП), системная шина и шина управления, блок поддержки управляющих интерфейсов (ИУ). Универсальность («гибкость») ПМ обусловлена его модульной конструкцией и широким набором линейных плат ЛП, который позволяет поддерживать несколько десятков различных абонентских интерфейсов. Список интерфейсов включает интерфейсы аналоговых абонентских установок, интерфейсы синхронной и асинхронной передачи дискретной информации в основном цифровом канале, каналов со скоростями 64n кбит/с, интерфейсы базового и основного доступа узко- полосных цифровых сетей интегрального обслуживания (У-ЦСИО) и другие. Помимо широкого набора интерфейсов абонентского доступа, универсальность ПМ обеспечивается также возможностями центрального блока. Возвращаясь вновь к рисунку 3.11, отметим, что центральный блок мультиплексора помимо стандартных интерфейсов 2 Мбит/с обладает практически тем же набором интерфейсов, что и центральный блок кроссконнектора. Управление мультиплексором осуществляется через блок поддержки интерфейсов управления ИУ, который через шину управления соединен с центральным блоком.
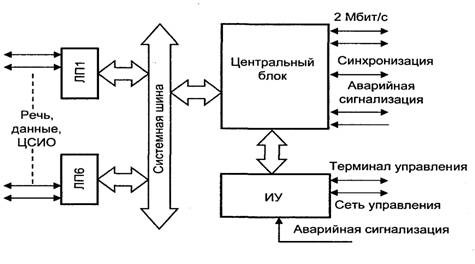
Рисунок 3.11 - Структурная схема первичного мультиплексора
Для передачи первичных цифровых потоков кроссконнекторы и мультиплексоры снабжаются оборудованием подключения линий различного типа. Линии могут быть выполнены как на кабеле с медными жилами, так и с оптическими волокнами. В первом случае оборудование подключения линий предусматривает подачу дистанционного питания на необслуживаемые регенерационные пункты. Оптические кабели могут содержать как многомодовые, так и одномодовые волокна, предусматривается возможность работы в окнах прозрачности 1310 и 1550 нм. В номенклатуру оборудования подключения линий обязательно входит блок удаленного сетевого окончания для организации базового доступа в узкополосную ЦСИО. Блок удаленного доступа подключается к соответствующей линейной плате мультиплексора.
Использование мультиплексора в конфигурации мультиплексора ввода/вывода ПМВВ (см. рисунок 3.12,б) позволяет выделять и вводить потоки 64 кбит/с из первичного потока. Кроме этого, в конфигурации ПМВВ возможна организация конференц-связи и многоточечного соединения.
На рисунке 3.12,в приведен пример организации разветвленной сетевой структуры с использованием первичных мультиплексоров и кроссконнекторов. Такие сети могут играть роль сетей доступа для телекоммуникационных сетей синхронной цифровой иерархии.
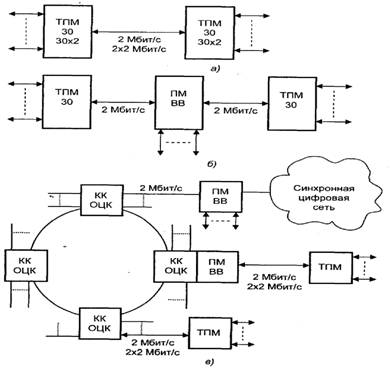
Рисунок 3.12 - Примеры применения универсальной системы первичного мультиплексирования
4 Синхронизация оборудования цифровых телекоммуникационных систем
Проблемы, связанные с синхронизацией, возникли еще до широкого внедрения цифровых телекоммуникационных систем, но применение последних и особенно систем электронной коммутации сделало вопросы синхронизации весьма и весьма актуальными.
В технологии электросвязи существует четыре основных понятия синхронизации: тактовая, фазовая, цикловая и временная.
Тактовая (частотная) синхронизация является наиболее важным типом синхронизации, суть ее заключается в согласованности по частоте задающих генераторов всех цифровых устройств, работающих на сети. Если во всех устройствах скорости передачи с высокой точностью равны скоростям приема, то при передаче информации не будет возникать потери информации из-за периодических проскальзываний.
Фазовая синхронизация обеспечивает соответствие фаз принимаемого и генерируемого сигналов. Как правило, этот вид синхронизации важен для функционирования тех или иных элементов оборудования, т.е. для внутренних процессов в системах передачи. Например, фазовая синхронизация используется при подаче стробирующего сигнала на решающее устройство регенератора с тем, чтобы момент принятия решения в регенераторе совпадал бы с максимумом амплитуды принимаемого импульса.
Цикловая синхронизация или выравнивание кадров предполагает выявление циклового синхросигнала (метки кадра) с тем, чтобы обеспечить корректную работу временного селектора на приеме, обеспечивающего доступ к компонентам цикла.
Временная синхронизация сводится к установлению единого времени для всех устройств сети. Обычно этот вид синхронизации предполагает использование системы всемирного скоординированного времени (UТС — Сооrdinated Universal Time). Это совершенно самостоятельная задача, которая может использоваться в системах защиты информации. Существуют проекты, позволяющие объединить эту задачу с задачей частотной синхронизации
Способы тактовой (частотной) синхронизации подразделяются на независимые (плезиохронные), принудительную синхронизацию и взаимную синхронизацию. Способы принудительной синхронизации в свою очередь подразделяются на способы «ведущий - ведомый» и «распределенный- ведущий».
Плезиохронные способы используются на соединениях между сетями синхронной цифровой иерархии в случаях, когда эти сети по тем или иным причинам не могут быть сиихронизированы от одного генератора.
Способы принудительной синхронизации применяются наиболее часто, причем способы типа «ведущий - ведомый» оказываются наиболее рентабельными. Способы типа «распределенный - ведущий» находят применение в радиосвязи и для внутриузловой синхронизации на сетях СЦИ. Способы взаимной синхронизации наиболее совершенны теоретически, но весьма сложны и применяются по преимуществу для повышения качества первичных (ведущих) генераторов на сетях СЦИ. Здесь рассматриваются общие принципы тактовой синхронизации типа «ведущий - ведомый». "Ведущим" при этом является задающий генератор в автономном режиме, а "ведомым" -генератор с принудительной синхронизацией.
4.1 Задающий генератор в автономном режиме
Функциональная схема задающего генератора (ЗГ) в большинстве случаев может быть сведена к схеме, показанной на рисунке 4.1. Она представляет собой замкнутую петлю (петлю обратной связи ОС), состоящую из усилителя мощности, ограничителя амплитуд и избирательного устройства -резонансного контура или полосового фильтра. Ограничитель амплитуд в общем случае не является отдельным устройством, а отображает амплитудную характеристику усилителя.

Рисунок 4.1- Функциональная схема задающего генератора
Свободные колебания в такой системе возможны при соблюдении условий баланса амплитуд и баланса фаз.
где n - число элементов в петле обратной связи,
m - целое число (m = 0, 1,...),
Si- усиление i-го элемента в децибелах,
а φi-фазовый сдвиг i-го элемента в радианах.
Предположим, что условие баланса фаз выполняется на частоте ω0, на которой тогда и происходит генерация. Пусть под воздействием внешних факторов в каком-либо элементе i параметр y изменился на ∆y, что привело к изменению фазового сдвига (и сдвига по петле ОС) на ∆φ. Тогда
 (4.1)
(4.1)
т.е. баланс фаз нарушился.
Восстановление баланса и, следовательно, удержание генерации происходит, как показывает опыт, при изменении частоты генерации на величину ∆ω. При этом
![]()
Воспользовавшись формулой Тэйлора и полагая, что отклонение частоты невелико
∆ω<< 1, получаем
 (4.2)
(4.2)
Отсюда относительная нестабильность частоты будет равна
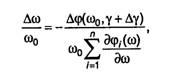 (4.3)
(4.3)
где знаменатель - фиксирующая способность генератора.
Из формулы (4.3) видно, что фиксирующая способность генератора тем больше, чем выше частота генерации и выше крутизна фазовой характеристики некоторого i-го элемента. Этот элемент, обладающий по сравнению с другими наибольшей крутизной фазовой характеристики, очевидно, должен иметь параметры, мало зависящие от внешних условий (быть стабильным) и от замены элемента (обладать эталонностью). Такими свойствами обладают кварцевые резонаторы (КР).
Генераторы с принудительной синхронизацией («ведомые») наиболее широко применяются в цифровых телекоммуникационных системах. В системах плезиохронной цифровой иерархии - в качестве задающих генераторов приемного оборудования, в системах синхронной иерархии - в качестве местных генераторов мультиплексоров
На рисунке 4.2 показана структурная схема генератора с принудительной синхронизацией. Она содержит генератор, управляемый напряжением ГУН, формирователь управляющего напряжения ФУН, фазовый детектор Фд и входное коммутирующее устройство КУ. Таким образом, в генераторе образуется петля фазовой автоподстройки частоты ФАПЧ. Помимо режима принудительной (внешней) синхронизации в генераторе предусматриваются обычно режимы: внутренней синхронизации (автономный) и внешнего запуска. Режим внутренней синхронизации является обычным для ЗГ оборудования передачи. В этом режиме петля фазовой автоподстройки частоты ФАПЧ разомкнута и ГУН находится в состоянии свободных колебаний, частота которых определяется параметрами подключаемого в этом режиме кварцевого резонатора КР, т.е. равна тактовой частоте в пределах установленной нестабильности.
В режиме принудительной синхронизации кварцевый резонатор отключается, петля ФАПЧ замыкается, и на Фд происходит сравнение частот сигнала, генерируемого ГУН, и сигнала от внешнего источника синхронизации, поступающего через коммутирующее устройство КУ. Результат сравнения передается на ФУН, где вырабатывается напряжение, перестраивающее ГУН до тех пор, пока частота его сигнала не совпадет с частотой внешнего сигнала синхронизации. Таким образом, достигается совпадение тактовых частот передающего и приемного оборудования.

Рисунок 4.2 - Структурная схема генератора м принудительной синхронизацией
В режиме внешнего запуска размыкается не только петля ФАПЧ, но и петля обратной связи ГУН, содержащая кварцевый резонатор. В этом режиме в ГУН собственные колебания отсутствуют, его роль сводится к формированию тактовых импульсов из внешнего сигнала. Этот режим используется в устройствах плезиохронной цифровой иерархии, работающих в сети с цифровой коммутацией. В режиме внешнего запуска коммутирующие устройства и цифровые телекоммуникационные системы всех станций, как ближнего, так и дальнего конца управляются центральным высокостабильным сетевым генератором. Коммутирующее устройство КУ позволяет подключать к генератору в качестве внешнего синхросигнала сигналы от различных источников, например, от выделителя синхронизирующего сигнала, от устройств цифровой коммутации и так далее. Блок ГУН имеет несколько выходов для разных потребителей -блоков данной системы или других станционных устройств.
Генератор в режиме принудительной синхронизации способен улучшать параметры ведущего синхросигнала за счет подавления в нем фазовых флуктуаций. Подавление фазовых флуктуаций происходит тем эффективнее, чем меньше полоса пропускания фильтра нижних частот ФНЧ, входящего в состав ФУН. Однако сужение полосы ФНЧ ограничено диапазоном захвата ФАПЧ -возможностью подстройки ГУН при изменении частоты ведущего синхросигнала (в пределах допустимой ее нестабильности). В современных цифровых телекоммуникационных системах это ограничение частично преодолевается применением специальных методов, рассматриваемых в теории систем ФАПЧ. Специальные методы позволяют также реализовать режим удержания, суть которого заключается в «замораживании» выходного напряжения ФУН при кратковременном пропадании внешнего синхросигнала и удержании, таким образом, постоянной частоты генератора.
4.2 Выделение хронирующего сигнала
Самым распространенным способом передачи синхронизирующего (хронирующего) сигнала в системах тактовой синхронизации является способ передачи его в составе линейного сигнала. Обычно хронирующий сигнал -спектральная составляющая тактовой частоты линейного сигнала. Поэтому выделение этой спектральной составляющей из линейного сигнала является весьма распространенной операцией, которая осуществляется устройством, называемым выделителем составляющей тактовой частоты (ВТЧ). Вход ВТЧ может быть подключен к линейному тракту или перед линейным регенератором (прямое выделение), или после него (обратное выделение, выделение с обратной связью). При использовании второго способа качество выделенного сигнала может быть выше, но есть вероятность того, что система потеряет устойчивость (в ней возникнут самопроизвольные колебания). Как в том, так и в другом случае схема ВТЧ обычно имеет вид, показанный на рисунке 4.3.
Выделитель составляющей тактовой частоты состоит из преобразователя кода ПК, ограничителя амплитуд снизу ОАН, полосового фильтра ПФ и ограничителя амплитуд сверху ОАВ. Далее на рисунке показаны фазовый корректор ФК, формирователь импульсной последовательности ФИ и линия задержки ЛЗ.
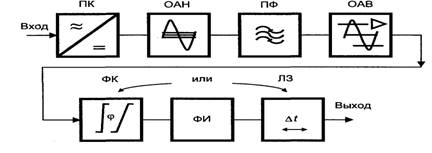
Рисунок 4.3 - Структурная схема ВТЧ
Назначение ПК - преобразовать линейный код, если в нем отсутствует составляющая тактовой частоты. Например, квазитроичный код должен быть преобразован так, чтобы все импульсы имели одну и ту же полярность; в двухуровневом коде с импульсами, затянутыми на тактовый интервал, должна быть осуществлена замена данных импульсов на биимпульсы и так далее. На рисунке 4.4,а показаны прямоугольные импульсы квазитроичного кода на передаче и их форма на приеме после коррекции искажений, а на рисунке 4.4,б -форма этих импульсов на выходе преобразователя кода ПК.
Ограничитель амплитуд снизу ОАН, куда далее поступает сигнал, предназначен для увеличения скважности принимаемых импульсов. Это иллюстрируется рисунком 4.4,в. Увеличение коэффициента скважности принимаемых импульсов приводит к увеличению в сигнале спектральной составляющей тактовой частоты. На рисунке 4.5 показаны огибающие спектров сигнала до и после ОАН. Очевидно, что на выходе ОАН спектральная составляющая тактовой частоты имеет большую величину и, следовательно, ее выделение более надежно.
Главным элементом ВТЧ является устройство с узкой полосой пропускания, которое, собственно, и выделяет из спектра сигнала составляющую тактовой частоты. Обычно это полосовой фильтр ПФ; на рисунке 4.4,г приведена
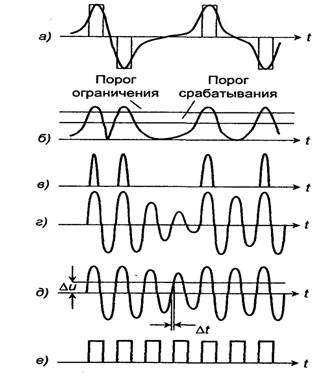
Рисунок 4.4 - Форма сигнала в различных точках ВТЧ
кривая на его выходе. Далее сигнал поступает на ограничитель амплитуд сверху ОАВ, стабилизирующий амплитуду сигнала (см. рисунок 4.4,д). Обычно ОАВ выполняется в виде резонансного усилителя, работающего в режиме отсечки сигнала сверху. Формирователь импульсов ФИ формирует импульсную последовательность (см. рисунок 4.4,е), которая и используется для синхронизации генераторного оборудования приемной станции.
Следует отметить, что ФИ характеризуется конечным порогом срабатывания ∆u, из-за чего формируемые импульсы оказываются смещенными во времени на случайные величины ∆t. Иными словами, формируемые импульсы «дрожат на оси времени», это явление носит название джиттера или вандера, если смещение происходит медленно. Джиттер приводит к увеличению числа ошибок на приеме, а вандер является источником шумов дискретизации в каналах ЦТС. Очевидно, что эти временные или иначе фазовые отклонения пропорциональны величине ∆u порога срабатывания ФИ и обратно пропорциональны скорости убывания амплитуд переходного процесса, возникающего при появлении в сигнале большого числа следующих друг за другом нулевых символов (большого пакета нулей). Скорость убывания амплитуд можно характеризовать периодом усреднения Nср фильтра, т.е. числом периодов отклика на единичный импульс, при котором амплитуда отклика убывает на порядок (на 20 дБ)
Nср=f0/∆f20
Здесь f0 - средняя частота полосы пропускания ПФ (в данном случае равная тактовой частоте), а ∆f20 - половина полосы пропускания фильтра на уровне —20 дБ. Например, в системе ИКМ-480 тактовая частота равна 34368 кГц, а полоса пропускания ПФ ВТЧ на уровне -20 дБ составляет 17 кГц, что соответствует Nср≈4000. Такие большие пакеты нулей в сигнале практически не встречаются, что гарантирует устойчивую работу ВТЧ. К сожалению, величина джиттера определяется не столько скоростью убывания амплитуды выделенного сигнала, сколько величиной смещения частоты выделяемого сигнала относительно средней частоты полосы пропускания фильтра. При этом за счет несимметричного выделения фильтром полос непрерывного спектра, примыкающих к синхросигналу (см. рисунок 4.5), последний приобретает квадратурную составляющую, т.е. оказывается модулированным по фазе. Это смещение практически всегда имеет место из-за изменения (в пределах допуска) частоты задающего генератора оборудования передачи. Поэтому полосу пропускания ПФ обычно выбирают относительно широкой; так, в системе ИКМ-480 допустимая абсолютная нестабильность тактовой частоты равна ±688 Гц, а полоса пропускания ПФ, как уже говорилось, составляет 17 кГц. Это на порядок больше величины, необходимой для захвата и удержания синхросигнала системой ФАПЧ ведомого генератора, смещение же тактовой частоты в этом случае не приводит к заметному нарушению симметрии боковых полос.
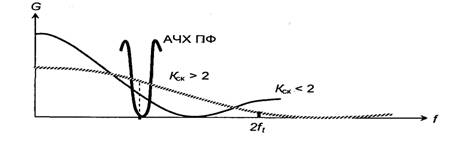
Рисунок 4.5 - Огибающие спектров сигнала
Формируемая на выходе ВТЧ импульсная последовательность используется не только для синхронизации задающего генератора генераторного оборудования, но и для управления решающими устройствами регенераторов. В дальнейшем будет показано, что в данном случае должна обеспечиваться возможность фазовой подстройки формируемой последовательности, т.е. ее сдвига в пределах тактового интервала. Это необходимо для того, чтобы решение о приеме импульсов сигнала принималось бы в тактовых точках, т.е. в моменты предполагаемых максимумов принимаемых импульсов. Такая подстройка может осуществляться или посредством аналогового фазового корректора ФК, или посредством линии задержки ЛЗ.
4.3 Цикловая синхронизация
Цикловой синхросигнал ЦСС представляет собой кодовое слово определенной структуры, занимающее жестко установленное место в цикле. Постоянство структуры и периодичность повторения являются признаками, по которым возможно обнаружение ЦСС и определение порядка расположения в данном потоке его компонентных составляющих: информационных символов и символов, несущих другую информацию.
Системы синхронизации должны удовлетворять следующим основным требованиям:
- среднее время удержания синхронизма между двумя его сбоями должно быть максимально;
- среднее время восстановления синхронизма при его нарушении должно быть минимальным, поскольку при этом теряется передаваемая информация и, в конечном итоге, может произойти рассоединение абонентов;
- количество разрядов в синхросигнале и частость его повторения должны быть минимальными, так как необходимость передачи синхросигнала приводит к снижению пропускной способности системы передачи.
Сбой циклового синхронизма вызывается потерей синхросигнала приемником. Чаще всего это происходит из-за воздействия помех. Ниже будут рассмотрены меры, повышающие надежность приема синхросигнала.
Рассмотрим принцип действия системы циклового синхронизма. В большинстве современных ЦТС приемники циклового синхронизма построены по принципу скользящего поиска, который поясняется рисунком 4.6. Принцип этот заключается в том, что вначале производится проверка совпадения первых поступивших на вход приемника b символов потока (b — число символов в цикловом синхросигнале) с комбинацией, присущей данному синхросигналу. Если эти символы не образуют комбинацию синхросигнала, производится смещение анализатора на один символ («соскальзывание» на один символ) и осуществляется анализ новой комбинации. Данная операция повторяется до тех пор, пока не будет найдена комбинация, совпадающая по своей структуре с синхросигналом. Эта комбинация может быть как истинным синхросигналом, так и ложным (случайно образованным символами других сигналов), поэтому после первого этапа - поиска синхрогруппы - осуществляется второй - проверка синхрогруппы на соответствие истинному синхросигналу (проверка синхрогруппы на истинность). Суть проверки на истинность заключается в проверке появления синхросигнала точно через интервал посылки синхросигнала в данной ЦТС. Существует, конечно, некоторая вероятность, что ложные синхросигналы также могут располагаться в потоке с такими же промежутками, как и истинные, однако, повторяя указанную проверку несколько раз подряд, можно снизить вероятность ошибки проверки на истинность до сколь угодно малой величины.
Попутно заметим, что в зоне скользящего поиска различают зону перекрытия, в которой анализатор захватывает хотя бы один символ истинной синхрогруппы, и зону случайного сигнала, содержащую все позиции, на которых формирование кодовых слов длиной b осуществляется без присоединения символов синхросигнала.
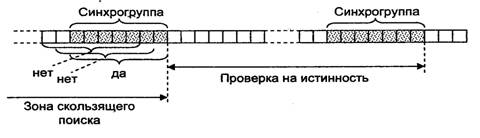
Рисунок 4.6 - Поиск синхросигнала
4.4 Структура и принцип действия приемника циклового
синхросигнала
На рисунке 4.7 представлена схема приемника циклового синхросигнала, который работает по принципу скользящего поиска. Рассмотрим подробно его различные состояния.
Синхронизм. В данный момент времени приходит истинная синхрогруппа. На выходе опознавателя (точка а) формируется «1». В этот же момент времени приемное генераторное оборудование ГОпр также генерирует синхрогруппу, что отмечается появлением «1» в точке b. На выходах анализатора формируется «0» в точке с и «1» в точке d. Поскольку такое состояние удерживается в течение нескольких посылок синхросигнала, накопитель по входу в синхронизм (с коэффициентом накопления r2) заполнен, а накопитель по выходу из синхронизма (с коэффициентом накопления r1) разряжен. В точках е и f устанавливаются «0».
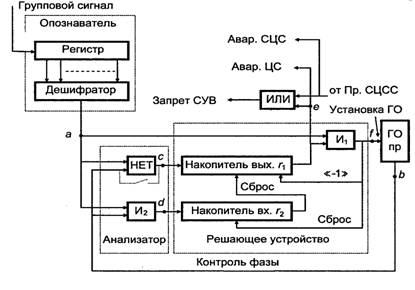
Рисунок 4.7 - Структурная схема циклового синхросигнала
В цифровом потоке имеются ложные синхрогруппы. При попадании их на вход опознавателя в точке "а" формируется «1», но в точке «b» при этом «0», следовательно, «0» и в точках с и d. Система остается в прежнем состоянии. Кратковременный сбой. Кратковременный сбой характеризуется искажением принимаемого синхросигнала (ошибками в символах синхрогруппы). В этом случае опознаватель не обнаруживает синхросигнала и в точке а формирует «0» в момент прохождения синхросигнала. В точке с на выходе анализатора появляется «1», и накопитель по выходу из синхронизма начинает заполняться. В точке "d" формируется «0», поэтому с выхода накопителя по входу в синхронизм сигнал «сброс» не поступает. При кратковременном сбое число искаженных подряд синхросигналов невелико и не превышает емкости накопителя r1. Пришедший очередной неискаженный синхросигнал формирует «1» в точке "d"; накопитель по входу в синхронизм переполняется, и сигнал с его выхода разряжает накопитель по выходу из синхронизма. Состояние синхронизма сохраняется.
Длительный сбой. При длительном сбое синхросигнал не опознается более чем r1 раз. Накопитель по выходу из синхронизма переполняется, на его выходе (точка е) формируется «1», которая поступает на один из входов схемы И1 и в цепи аварийной сигнализации и блокировки согласующих устройств. Блокировка согласующих устройств необходима для предотвращения поступления на АТС ложных сигналов. С этого момента начинается новый процесс скользящего поиска: групповой поток поступает в регистр сдвига опознавателя, и дешифратор бит за битом производит его анализ. При обнаружении в потоке синхрогруппы, структура которой совпадает со структурой синхросигнала, на выходе анализатора (точка а) формируется «1», которая поступает на второй вход схемы И1. На выходе И1 (точка f) также формируется «1», которая поступает на ГОпр и устанавливает в нем начало четного цикла (момент формирования синхросигнала). Одновременно эта «1» разряжает последнюю ячейку накопителя по выходу из синхронизма (в точках е и f формируются «0» и полностью разряжает накопитель по входу в синхронизм). Начинается процесс проверки данной синхрогруппы на истинность. Если опознанная синхрогруппа была ложной, то через период следования синхросигнала синхросигнал не появится,в точке "а " сформируется «0», в точке b - «1», в точке с «1» , и накопитель по выходу вновь заполняется. Продолжается процесс скользящего поиска.
Вхождение в синхронизм. Если опознанная синхрогруппа была истинной, то через период следования синхросигнала в точках а и b сформируются «1» и накопитель по входу в синхронизм начнет заполняться. Через r2 повторений этого процесса (r2 - число ячеек в накопителе по входу в синхронизм) накопитель по входу заполняется полностью, происходит полный разряд накопителя по выходу из синхронизма, и система оказывается в состоянии синхронизма. При этом снимаются сигналы в цепях блокировки устройств и аварийной сигнализации.
Если циклы передачи данной ЦТС объединены в сверхциклы, то после установки циклового синхронизма начинается процесс установки сверхциклового синхронизма. Поскольку начало цикла установлено, приемник сверхциклового синхросигнала не осуществляет скользящего поиска, а проверяет поочередно во всех циклах позиции сверхциклового синхросигнала (например, наличие символов «0» на позициях Р1 - Р4 КИ16 первичной системы передачи ИКМ-30). При обнаружении сверхциклового синхросигнала синхронизм системы считается установленным; снимается аварийная сигнализация и блокировка согласующих устройств, работа которых связана со структурой сверхцикла.
5 Мультиплексирование цифровых потоков
Многоканальные телекоммуникационные системы, в том числе и цифровые, строятся по иерархическому принципу. Цифровой поток, создаваемый цифровой телекоммуникационной системой данной ступени иерархии, получается в результате объединения нескольких потоков ЦТС предыдущей ступени. Такая операция называется временным группообразованием (ВГ) или мультиплексированием. Количество объединяемых потоков определяется коэффициентом мультиплексирования; в европейской плезиохронной цифровой иерархии коэффициенты мультиплексирования для всех ступеней выше первой равны четырем. Равны четырем и коэффициенты мультиплексирования синхронной цифровой иерархии.
Принцип мультиплексирования заключается в том, что на передаче объединяемые (компонентные) потоки записывают каждый в своё запоминающее устройство (ЗУ), а затем поочередно считывают на общую шину, на которой таким образом и образуется общий (агрегатный) поток. При этом длительность импульсов компонентных потоков уменьшают, по крайней мере, в число раз, равное коэффициенту мультиплексирования. На приеме осуществляется обратная операция: из агрегатного потока поочередно считывают импульсы компонентных потоков, их длительности увеличивают до прежнего размера и подают на соответствующие выходы.
В ЦТС ПЦИ из ЗУ поочередно считывают на общую шину биты компонентных потоков, что соответствует побитовому мультиплексированию. В ЦТС СЦИ применяется побайтовое мультиплексирование, при котором поочередно считывают отрезки компонентных потоков размером в 1 байт (8 бит). При этом эти отрезки могут совпадать с восьмиразрядными канальными сигналами ЦТС первой ступени иерархии (первичных ЦТС) или не совпадать с ними. В случае совпадения говорят о поканальном мультиплекспровании. Можно объединять потоки и по другим их структурам, например, по циклам передачи. В этом случае говорят о посистемном мультиплексировании. Побитовое мультиплексирование двух потоков иллюстрирует рисунок 5.1, а на рисунке 5.2 показана структурная схема записывающего устройства одного из компонентных потоков.
Второй поток имеет точно такое же ЗУ, выходы ЗУ объединены.
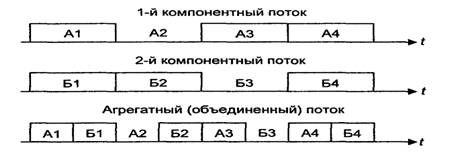
Рисунок 5.1 - Принцип объединения цифровых потоков
Различие ЗУ заключается лишь в том, что последовательности импульсов считывания, подаваемые на них, сдвинуты относительно друг друга на тактовый интервал агрегатного потока для того, чтобы импульсы компонентных потоков в агрегатном потоке не перекрывались.
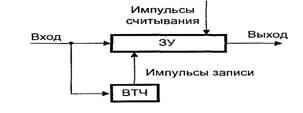
Рисунок 5.2 - Записывающее устройство компонентного потока
На приеме компонентные потоки разделяются (демультиплексируются) временным селектором, осуществляющим поочередное считывание импульсов агрегатного потока на первый и второй выходы. При этом возникает задача идентификации (определения) номеров принимаемых потоков, которая может быть решена, например, в результате выравнивания фазы приемника и передатчика перед началом сеанса связи. Такой способ мультиплексирования называется синхронно-синфазным или синхронным с «жесткой» фазой. На практике чаще применяется синхронное мультиплексирование с «плавающей» («мягкой») фазой, обычно его называют просто синхронным мультиплексированием.
5.1 Синхронное мультиплексирование
При синхронном мультиплексировании компонентный поток записывается со скоростью, с какой он приходит, т.е. частота его записи f3 равна тактовой частоте fT , получаемой от выделителя тактовой частоты ВТЧ. Считывание же информации из запоминающего устройства осуществляется с частотой fсч, превосходящей частоту записи, как это показано на рисунке 5.3. Поскольку fсч> fз , то периодически ячейки памяти ЗУ будут оказываться свободными (эти моменты отмечены на рисунке звездочками) и в считанном потоке появятся «пробелы», называемые временными сдвигами. Если отношение периода считывания Тсч, к разности периодов записи Тз и считывания Тсч целое число, то временные сдвиги будут следовать с постоянной частотой. Так на рисунке 5.3, Тз/Тсч = 4/3 и Тсч/(Тз - Тсч) =3, то временные сдвиги всегда отделены друг от друга тремя информационными символами. На позициях временных сдвигов передается цикловой синхросигнал агрегатного потока и другая служебная информация.
Рассмотрим принцип синхронного мультиплексирования потоков на примере вторичной ЦТС, функциональная схема которой показана на рисунке 5.4. Четыре первичных компонентных потока (КП1 - КП4) поступают на входы ЗУ приемной части оборудования (см. рисунок 5.4,а).

Рисунок 5.3 - Создание временных сигналов
Импульсы записи подаются от генераторного оборудования ГО1, синхронизированного тактовой частотой компонентных потоков f3 = ft (ft одинакова для всех компонентных потоков, поскольку по определению они синхронны). Считывание импульсов осуществляется с частотой fсч = (33/32)· ft, а так как ЗУ имеет две ячейки памяти, временные сдвиги, равные двум импульсным позициям, следуют через 64 интервала. Импульсные последовательности считывания вырабатываются генераторным оборудованием ГО2, синхронизированным частотой, получаемой от преобразователя частоты ПЧ и равной (33/32)· ft .Считывание с различных ЗУ осуществляется со сдвигом Тат = Тсч/4. Считываемые импульсы подаются на общую шину, где и объединяются в агрегатный поток. Временные сдвиги в различных КП следуют друг за другом, поэтому в агрегатном потоке они образуют восьмиразрядные пакеты, используемые для передачи циклового синхросигнала и другой служебной информации. Цикловой синхросигнал формируется передатчиком циклового синхросигнала ПЕР ЦСС.
Очевидно, что тактовая частота агрегатного потока fta =4·(33/32)·ft , и, следовательно, если скорость передачи компонентного потока равна 2048 кбит/с, то скорость агрегатного составит 4·(33/32)·2048 = 8448 кбит/с. Заметим, что скорость передачи служебной информации в агрегатном потоке будет равна 4· (33/32)·2048 - 4·2048 = 256 кбит/с.
В приемной части оборудования (см. рисунок 5.4,б) из агрегатного потока АП в ЗУ поочередно записываются импульсы компонентных потоков. Момент начала записи устанавливается приемником циклового синхросигнала ПР ЦСС, импульсы записи вырабатываются ГО2. Считывающие импульсы вырабатываются ГО1, которое синхронизировано частотой ft.
ГО2 можно синхронизировать тактовой частотой агрегатного потока, поделенной на 4, а ГО1 частотой, равной (32/33)·f3. Однако, на практике, если вторичная ЦСП объединяет синхронные потоки, синхронизация генераторного оборудования всегда осуществляется частотой ft.
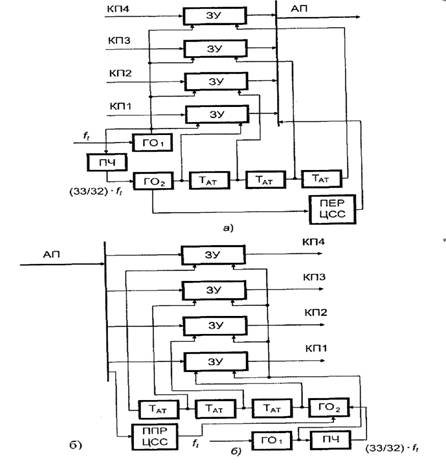
Рисунок 5.4 - Структура оборудования синхронного объединения потоков
5.2 Система команд двустороннего согласования скоростей
Команды согласования скоростей (КСС) компонентных потоков должны обладать помехоустойчивостью не меньшей, чем цикловые синхросигналы, поскольку ошибка при опознавании КСС равносильна смещению на один такт цикла передачи соответствующего компонентного потока, а это неизбежно приводит к потере в нем циклового синхронизма. В свою очередь потеря циклового синхронизма в данном потоке приведет к потере циклового синхронизма во всех его компонентных потоках и так далее. В конечном итоге передача в компонентных потоках низшей ступени иерархии будет прекращена на все время выхода из циклового синхронизма и последующего поэтапного вхождения в синхронизм.
Однако между цикловыми синхросигналами и КСС есть большое отличие. Синхросигналы передаются периодически, и решение о выходе из синхронизма принимается лишь в том случае, если число искаженных сигналов превысило число ячеек накопителя по выходу из синхронизма. Иными словами, необходимая помехозащищенность синхросигналов достигается методом накопления. Команды согласования скоростей передаются однократно, следовательно, обеспечение их помехозащищенности должно достигаться другими способами.
В системах с односторонним согласованием скоростей необходимо передавать информацию о двух состояниях передающего устройства: отсутствии и наличии согласования. Для передачи этой информации достаточно одного двоичного разряда. В этом случае для защиты от r ошибок команда должна передаваться кодовой группой, состоящей из m = 2r+1 символов. Обычно в качестве КСС используются группы вида 000....0-для передачи информации об отсутствии согласования скоростей и вида 111...1 - для передачи информации о наличии согласования. В этом случае приемник КСС представляет собой счетчик единиц. Если количество единиц меньше половины общего числа символов в команде, то принимается решение о том, что передана кодовая группа 000...0, если больше половины -кодовая группа 111...1. Очевидно, правильное опознавание команды происходит, если число ошибок в группе не превышает половины общего числа символов в группе.
Как показывают расчеты, в ЦСП высших ступеней иерархии для КСС следует использовать кодовые группы из пяти символов, что обеспечивает защиту от двух ошибок. При этом защищенность КСС оказывается того же порядка, что и цикловых синхросигналов. Однако команды такой длительности используются только в ЦТС четвертой ступени (рекомендация G.751 МСЭ-Т). Во вторичной и третичной системах (рекомендации G.742, G.751 МСЭ-Т) используют трехсимвольные команды, обеспечивающие защиту от одиночных ошибок, и помехоустойчивость КСС требуется повышать другими способами.
В системах с двусторонним согласованием необходимо передать информацию о трёх возможных состояниях передающего устройства: отсутствии согласования скоростей, наличии положительного согласования и наличии отрицательного согласования. Увеличение объема передаваемой информации при двустороннем согласовании требует увеличения количества символов, необходимых для передачи этой информации при заданной помехозащищенности. Защиту от одиночных ошибок в этом случае обеспечивают не трех - , а пятиразрядные кодовые группы, от двукратных - семиразрядные и так далее. Это приводит, в конечном счете, к увеличению времени восстановления синхронизма и увеличению фазовых флуктуаций в компонентных потоках.
В отечественных ЦСП принята система двустороннего согласования, но количество команд уменьшено с трех до двух за счет исключения нейтральной команды (команды отсутствия согласования). Эта команда заменяется последовательной передачей команд положительного и отрицательного согласования.

Рисунок 5.5 - Структура двухкомандного сигнала при двухстороннем согласовании скоростей
Таким образом, система с двусторонним согласованием скоростей по числу состояний становится идентичной системе с односторонним согласованием, и более того, в ней представляется возможным осуществить коррекцию команд согласования и, следовательно, заметно повысить их помехозащищенность. Принцип коррекции КСС поясняет рисунок 5.5. В верхней части рисунка показан график изменения временной неоднородности ∆t , которая в данном случае положительна и увеличивается с течением времени. Пока ее значение меньше критической, передается нейтральная команда (чередование положительных и отрицательных команд -пассивная зона). Когда ∆t достигает критического значения, равного периоду частоты считывания Тсч компонентного потока из запоминающего устройства БАСпер, формируется сдвоенная положительная команда (активная зона), согласно которой и осуществляется положительное согласование, как это показано в строке "а " рисунка 5.5.
Если бы временная неоднородность, уменьшаясь, достигла бы отрицательного критического значения Тсч (на рисунке не показано), была бы передана сдвоенная отрицательная КСС, по которой на приеме осуществилось бы отрицательное согласование. Очевидно, что искажение команд в пассивной зоне (при передаче нейтральной КСС-отсутствие согласования) приводит к появлению строенных отрицательных или положительных команд, как это показано на рисунке 5.5, строки b, с. Строенные команды приемником КСС игнорируются. Искажение команд в активной зоне (см. рисунок 5.5, строки d, е) приводит к появлению сдвоенных команд противоположного значения. Коррекция ошибки при этом может быть осуществлена косвенно. Во-первых, можно игнорировать сдвоенную команду, если её знак противоположен знакам нескольких сдвоенных предыдущих, поскольку относительная нестабильность задающих генераторов ЦСП невелика и расхождение скоростей потоков имеет один и тот же характер в течение длительного времени. Во-вторых, и это более надежный способ, информацию о знаке временной неоднородности можно передавать на свободных позициях цикла передачи, тогда команда, знак которой противоположен известному знаку временной неоднородности, считается ошибочной и игнорируется. Расчеты показывают, что принятые способы коррекции активных команд повышают их помехозащищенность более чем на два порядка.
6 Передача цифровых сигналов
Наиболее важной особенностью цифрового способа передачи сигналов является возможность восстановления переданной импульсной последовательности после прохождения ее через среду, вносящую дисперсию и помехи. Импульсная последовательность восстанавливается с помощью регенераторов, размещаемых вдоль линии через некоторые интервалы. Сочетание кабельного участка и регенератора называют участком регенерации. Регенераторы выполняют три основные функции: корректирование формы принимаемых импульсов, хронирование (восстановление временных интервалов) и собственно регенерацию.
Это функциональное деление отражено на рисунке 6.1, где представлена структурная схема одного регенерационного участка. В данном случае предполагается, что импульсная последовательность на выходе предыдущего регенератора (точка 1 на рисунке 6.1) состоит из серии положительных и отрицательных импульсов и пробелов. Импульсы, появляющиеся на входе данного регенератора (точка 2), искажены как из-за передачи по кабелю, так и в результате воздействия помех. С помощью корректирующего усилителя исправляется форма импульсов и увеличиваются амплитуды импульсов до величин, обеспечивающих возможность принятия решения о наличии или отсутствии импульса. Окончательное восстановление импульсной последовательности производится с помощью операций хронирования и регенерации, осуществляемых одновременно. Регенерация импульса возможна только в тот момент времени, когда сумма амплитуд принимаемого импульса и помехи в точке З (точке решения регенератора ТРР) превышает уровень решения (порог) и когда сигнал на выходе канала выделения хронирующего сигнала (точка 4) имеет заданную амплитуду и полярность (момент решения). Хронирующий сигнал обеспечивает, во-первых, дискретизацию скорректированных импульсов в моменты времени, характеризующиеся максимальной величиной отношения сигнал/помеха, и, во-вторых, поддержание надлежащей расстановки импульсов во времени.
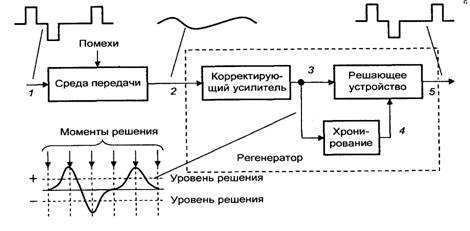
Рисунок 6.1 - Структурная схема участка регенерации
В идеальном случае восстановленная импульсная последовательность на выходе регенератора (точка 5) будет являться точной копией импульсной последовательности в точке 1. На практике восстановленная последовательность импульсов может отличаться от исходной. Во-первых, если помеха в момент решения имеет достаточно большую амплитуду, то может быть принято неправильное решение, в результате чего появится ошибка. Ошибки такого типа в декодированных аналоговых сигналах проявляются в виде шума. Во-вторых, интервалы между импульсами могут отличаться от их заданных значений, т.е. имеют место фазовые флуктуации положений импульсов. Эти флуктуации импульсов проявляются в аналоговых сигналах в виде помех дискретизации и увеличивают вероятность появления ошибки в последующих регенераторах. В- третьих, импульсы могут отличаться друг от друга по форме, например, из-за неточности установки питающих напряжений импульсы разной полярности могут иметь разную амплитуду, что увеличивает вероятность появления ошибки в следующем регенераторе.
6.1 Помехоустойчивость регенератора
Качество передачи цифровых сигналов, прежде всего, определяется безошибочностью принятой информации. Ошибки на приеме возникают из-за помех, изменяющих форму сигнала так, что регенератор не может с достоверностью установить его истинное значение (в предельном случае -идентифицировать «1» и «0»).
На сигналы воздействуют помехи трех типов: линейные, собственные и
интерференционные (межсимвольные). Межсимвольные помехи иногда называют межсимвольными искажениями. Линейные помехи (помехи от линейных переходов) -результат воздействия параллельно работающих систем передачи. Их значение определяется переходными затуханиями в кабеле и количеством параллельно работающих систем передачи. Спектр этих помех неравномерен - близок к спектру линейного сигнала. В волоконно-оптических линиях связи (ВОЛС) эти помехи практически отсутствуют. Собственные помехи определяются свойствами корректирующего усилителя линейного регенератора, эти помехи имеют относительно равномерное спектральное распределение.
Интерференционные (межсимвольные) помехи возникают из-за линейных искажений в среде передачи, точнее из-за ограничения спектра передаваемого сигнала сверху (помехи 1 рода) и снизу (помехи 2 рода).
В ВОЛС межсимвольные помехи возникают в результате дисперсии. Различают межмодовую дисперсию, хроматическую, состоящую из материальной и волноводной, и поляризационную.
Рассмотрим механизм воздействия межсимвольных помех на примере передачи сигналов по кабелю с металлическими парами. Такие кабели являются распределенными системами и характеризуются четырьмя первичными параметрами (отнесенными к одному километру длины кабеля): сопротивлением проводов R, емкостью между проводами C, индуктивностью проводов L и проводимостью изоляции G. Для анализа в первом приближении достаточно учесть первые два параметра, в результате чего кабельный участок длиной 1 км моделируется простейшим фильтром нижних частот (см. рис. 6.2,а) с постоянной времени τв =Rл Cл причем , Rл = I R и Сл = IС. Тогда uвых = uвх(1 -е-t/τв). Форма прямоугольного импульса приобретает вид, показанный на рисунке 6.2,б «Хвост» импульса является помехой для последующего. Эта межсимвольная помеха является помехой 1 рода.
Если учесть все четыре параметра кабеля и то, что они распределенные, форма искаженного импульса оказывается близка к гауссовой, причем по мере увеличения длины кабельного участка растет τв , и, следовательно, высота импульса становится меньше, а длительность больше (см. рисунок 6.3). Но в любом случае помехи 1 рода, определяемые небольшой постоянной
τв ,действуют лишь на ближайший импульс.
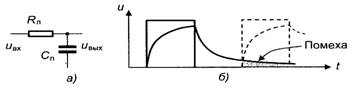
Рисунок 6.2 - Форма импульса при прохождении через ФНЧ
Дисперсия в ВОЛС приводит к искажению импульсов, которые, как и в кабеле с металлическими жилами, приобретают форму, близкую к гауссовской. На рисунке 6.3 показано взаимное влияние импульсов при искажениях 1 рода и наложение на эти импульсы флуктуационной помехи (степень затенения условно показывает плотность вероятности мгновенных значений помехи). В кабелях с металлическими парами такими элементами являются прежде всего линейные трансформаторы. В ВОСП аналогичную роль играют разделительные конденсаторы электрической части трактов. Для этих случаев тракт в первом приближении аппроксимируется дифференциальным звеном с параметрами τн = (Rc+Rн)Ср, если в тракте разделительный конденсатор, или
τн = L1/( Rc||Rн), если в тракт включен линейный трансформатор с индуктивностью первичной обмотки, равной L1 . В этих формулах Rc и Rн сопротивления источника сигнала и нагрузки рассматриваемой цепи соответственно. Тогда uвых = uвх е-t/τн ,
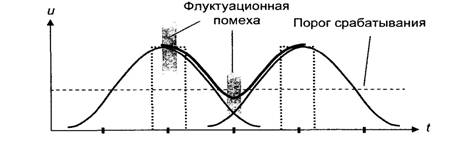
Рисунок 6.3 - Сложение флуктуационных помех и межсимвольных помех 1 рода
Поскольку τв << τн, искажения 2 рода гораздо опаснее, так как влияние данного импульса распространяется на многие последующие такты. На рисунке 6.4 показано влияние межсимвольных помех II рода на сигналы с высокой (см. рисунок 6.4,а) и низкой плотностью (см. рисунок 6.4,б) единиц. Очевидно, что при высокой плотности единиц происходит смещение импульсной последовательности вниз (постоянная составляющая сигнала подавляется). При этом вершины импульсов приближаются к порогу решения, и их идентификация становится затруднительной. Если плотность единиц в сигнале невелика, постоянная составляющая будет также мала и ее подавление не приведет к заметным искажениям.
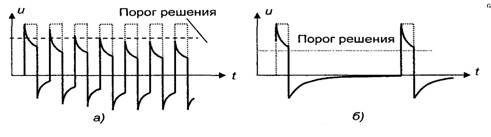
Рисунок 6.4 - Искажение 11 рода при высокой(а), низкой плотности единиц (б)
6.2 Коррекция межсимвольных искажений
Межсимвольные искажения могут быть значительно уменьшены, если осуществить коррекцию амплитудно-частотной и фазовой характеристик (АЧХ и ФХ) тракта. Коррекция АЧХ и ФХ тракта осуществляется корректирующим усилителем регенератора в области высоких частот, т.е. ослабляет лишь помехи 1 рода. Коррекция в области низких частот неэффективна, поэтому межсимвольные помехи 2 рода ослабляются посредством выбора такого линейного кода, у которого низкочастотные составляющие спектра невелики.
В общем случае коррекция АЧХ и ФХ предполагает расширение полосы пропускания тракта до бесконечно высокой частоты. Однако при этом неограниченно снижается защищенность регенератора от собственных помех, поскольку для них характерно равномерное спектральное распределение, в то время как основная энергия сигнала сосредоточена в относительно узкой полосе частот. Таким образом, требования к корректору с точки зрения подавления межсимвольных искажений и собственных помех противоречивы. Путь к преодолению этого противоречия был найден Х. Найквистом, предложившим ограничивать АЧХ так, чтобы на приеме сигнал, соответствующий импульсу в данной тактовой точке, обращался бы в нуль во всех последующих тактовых точках (в точках, соответствующих максимумам передаваемых импульсов). Этому условию, называемому первым условием Найквиста, отвечает в частности сигнал
![]()
6.3 Коэффициент ошибок регенератора
Для правильного определения символа на входе регенератора требуется некоторая минимальная величина отношения сигнал/помеха. Рассмотрим вначале случай, когда принимаемая импульсная последовательность представляет собой положительные и отрицательные импульсы с амплитудами соответственно +U0/2 и -U/2 при равной вероятности появления импульсов одной и другой полярности (см. рисунок 6.5). Оптимальное расположение порога принятия решения равно среднему значению сигнала. В этом случае порог решения должен быть установлен равным нулю uпр= uсрс= 0. Если в момент решения амплитуда импульса с учетом помехи больше нуля, то будет принято решение о приеме импульса положительной полярности, если же амплитуда импульса с учетом помехи будет меньше нуля, то будет восстановлен импульс отрицательной полярности. Для расчета вероятности ошибки предположим, что помеха, добавляющаяся к сигналу, имеет гауссово распределение мгновенных значений, как это показано на рисунке 6.5 справа.
Функция интеграла вероятности табулирована и приведена практически в любом пособии по теории вероятностей и математической статистике, поэтому несложно решить обратную задачу: по заданной допустимой вероятности ошибки найти требуемую помехозащищенность в точке решения регенератора. Действительно, если Рош доп задано, то Ф(хдоп) = 1 -2 Рош доп, откуда по таблицам находится значение х доп Поскольку, как это видно из рисунка 6.5,
![]()
то соответствующая этому значению вероятности ошибки требуемая помехозащищенность регенератора должна быть равна:
![]()
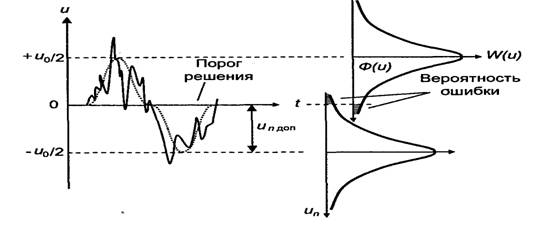
Рисунок 6.5 - Определение допустимой помехозащищенности регенератора
Быстрое снижение рош с ростом помехозащищенности позволяет считать, что при помехозащищенности более 17,7 дБ ошибки практически отсутствуют. Однако в реальных условиях надо иметь в виду следующее. Во-первых, вышеприведенные расчеты были сделаны для случая идеальной коррекции частотных характеристик тракта передачи, т.е. при отсутствии межсимвольных помех. Во-вторых, распределение мгновенных значений помехи может отличаться от распределения Гаусса. Наконец, в- третьих, в работе регенератора могут иметь место различные погрешности, о которых будет сказано далее. С учетом сказанного, требуемая помехозащищенность регенератора должна быть взята с некоторым запасом ∆Арег. Обычно величина запаса принимается равной 10...15 дБ.
Для расчёта зависимости требуемой помехозащищенности регенератора от коэффициента ошибок удобно пользоваться эмпирической формулой:
Ап3треб = N+ M lg lg (1/ Pош) + 20 lg (my - 1) + ∆Арег , дб (6.1)
Таблица 6.1- Значения NиМ для различных пределов ошибок
|
№ |
Рош |
N |
М
|
погрешность расчёта,дб |
|
1 |
10-05…10-15 |
4,63 |
11,42 |
_ |
|
2 |
2
|
4,75 |
11,3 |
|
6.4 Метод "глаз - диаграммы"
Удобным графическим методом определения воздействия на импульсы реальных искажений, возникающих при распространении импульсов от регенератора к регенератору, является метод «глаз-диаграммы». Она представляет собой осциллограмму в точке решения регенератора (ТРР), причем вертикальная развертка определяется приходящей случайной импульсной последовательностью, а горизонтальная соответствует периоду тактовой частоты. В реальном случае форма одиночного импульса в ТРР близка к гауссовой, и «глаз-диаграмма» для сигнала в трехуровневом коде имеет вид, показанный на рисунке 6.6. Из указанного рисунка легко определить зону или «раскрыв», в пределах которой должна производиться операция решения для каждого из двух уровней.
В данном случае «раскрыв» «глаз-диаграммы» (область, где должно приниматься решение о значении импульса) для верхней части определяется комбинациями -1,+1, -1 (сверху) и +1, 0,+1 (снизу). Если импульс в точке решения регенератора ТРР аппроксимируется гауссовой формой,то максимальный «раскрыв» по вертикали можно найти как Uр макс = U0(1 -4е-k), а ширину «раскрыва» 2tмакс из соотношения 4ch(k2tмакс / Т) = еk.
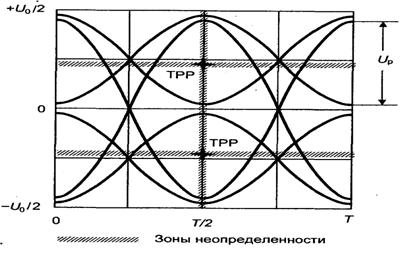
Рисунок 6.6 - « Глаз-диаграмма» для сигнала в троичном коде
Для импульса, у которого S(0,5T) = 0,5 U0, k = 2,773. Тогда S(Т) = 0,0625U0,
Uр макс=0,75U0 и 2 tмакс=0,7442Т. Часто импульс в ТРР аппроксимируют косинусквадратной формой
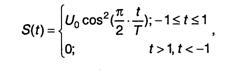
![]()
Следует отметить, что величина межсимвольных помех может оказаться больше расчетной за счет допусков при реализации характеристик корректирующего усилителя. Кроме того, реальное решающее устройство характеризуется зонами неопределенности в установлении величины порога и момента принятия решения. Учет неточности процесса принятия решения может быть осуществлен следующим образом. Можно считать, что точка решения, т.е. точка пересечения порога и момента принятия решения (точка ТРР) остается неизменной, а соответствующим образом уменьшается «раскрыв» «глаз-диаграммы» (см. рисунок 6.7). При этом ошибки подразделяются на амплитудные, характеризующие смещение по вертикальной оси, и на временные, характеризующие смещение по горизонтальной оси.
На практике «раскрыв» Нр, определяют по отношению к размаху импульса 2U0. В этом случае при использовании mу- уровневого кода (для mу- уровневой глаз-диаграммы) это выражение принимает вид
![]() (6.2)
(6.2)
![]()
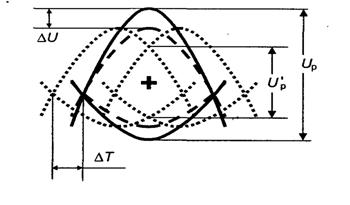
Рисунок 6.7
- Влияние погрешности на
раскрыв глаз-диаграммы
На рисунке 6.8 представлены зависимости ∆Арег, характеризующие требуемое увеличение отношения сигнал/помеха от нормализованного значения уменьшения «раскрыва» «глаз-диаграммы» R для различных значений mу. Чтобы получить результирующую величину требуемого отношения сигнал/шум при заданной вероятности ошибки, необходимо в формуле для заданных значений рош, и mу величину ∆Арег рассчитать по соотношению или взять из графиков рисунка 6.8.
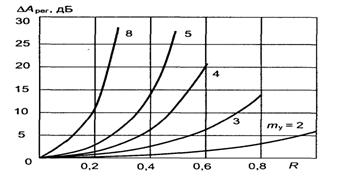
Рисунок 6.8 - Зависимость помехозащищенности регенератора от уменьшения раскрыва "глаз- диаграммы"
Так, например, при mу=5, и R= 0,4 получаем ∆Арег≈14 дБ. Тогда для рош =10-10 по формуле 6.7 требуемая величина помехозащищенности регенератора будет
![]()
Таблица 6.2.- Причины снижения помехоустойчивости
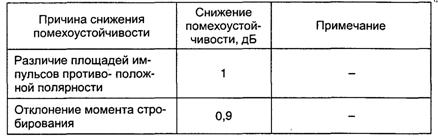
Таким образом, наличие различных ухудшающих факторов требует увеличения помехозащищенности регенератора примерно на 10 дБ
6.5 Коды в линии
Методы коррекции частотных характеристик тракта позволяют снизить межсимвольные помехи, происходящие от искажений 1-рода (из-за ограничения спектра сигнала сверху). Коррекция частотных искажений в области низких частот неэффективна, а потому для уменьшения межсимвольных помех из-за искажений 2-рода следует использовать такие сигналы в линии, у которых низкочастотные спектральные составляющие относительно невелики. Это достигается выбором определенного кода сигнала в линии. Вообще сигналы в линии должны отвечать следующим условиям:
- спектр сигнала (область, где сосредоточено ~ 90% мощности) должен быть возможно сильнее ограничен, особенно в области нижних частот;
- структура сигнала должна позволять достаточно просто выделять из него сигнал тактовой частоты;
- должна обеспечиваться возможность контроля коэффициента ошибок в тракте без перерыва связи.
Рассмотрим вначале, в какой степени случайная последовательность в натуральном коде с вероятностью появления единиц р и коэффициентом скважности Кск=Тд/τи, представленная на рисунке 6.9, удовлетворяет поставленным требованиям. Как видно из рисунка, случайная последовательность импульсов с амплитудой U0 в натуральном коде (верхняя осциллограмма) может быть представлена суммой регулярной (детерминированной) последовательности положительных импульсов с амплитудой рU0 (средняя осциллограмма) и двух случайных последовательностей: положительных импульсов с амплитудой (1-р) U0 и отрицательных -с амплитудой рU0.
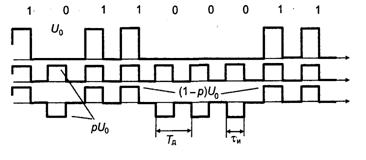
Рисунок 6.9 - Структура случайной двоичной последовательности
Мощности этих последовательностей могут быть подсчитаны по следующим формулам:
-мощность исходной последовательности
![]()
-мощность детерминированной последовательности
![]()
тогда мощность случайных последовательностей составит
![]()
или
![]()
В этом выражении синус квадратный множитель соответствует энергетическому спектру прямоугольного импульса и определяет частотную зависимость составляющих дискретного спектра, а также огибающую непрерывного энергетического спектра случайной последовательности двоичных прямоугольных импульсов.Спектры для коэффициентов Кск ,равных соответственно 1, 2 и 4, а также для биимпульсов длительностью в один период тактовой частоты (о которых речь пойдет далее).
Обратимся к требованиям, сформулированным выше. Мы видим, что в случайной последовательности в натуральном коде поставленные требования практически не удовлетворяются. Во- первых, спектр сигнала относительно широк и в нем присутствует постоянная составляющая, что приводит к большим межсимвольным помехам. Во-вторых, хронирующий сигнал в спектре имеется, но при р→ 0, его мощность также стремится к нулю, т.е. при передаче комбинаций, состоящих из больших пакетов нулей, выделение хронирующего сигнала будет затруднено. В-третьих возможность контроля появления ошибок отсутствует. Для устранения основных недостатков первоначально было использован метод чередования полярности импульсов
(код ЧПИ), т.е. символу «0» в этом коде соответствовала пауза, а символу «1» - последовательно импульсы положительной и отрицательной полярности. Действительно, чередование полярности позволяет относительно хорошо компенсировать межсимвольные помехи 1 рода и, что особенно важно, - помехи 2 рода. Это обстоятельство позволяет предположить, что спектр сигнала в коде ЧПИ ограничен по сравнению с исходной последовательностью как сверху, так и снизу.
В сигнале с ЧПИ возможен контроль появления ошибок. Действительно, пропадание импульса или появление ложного приводит к нарушению чередования полярности, что легко контролировать по текущей сумме, которая не должна превышать единицы. Возможна даже коррекция ошибок методом Витерби (методом максимального правдоподобия - ошибка наиболее вероятна в бите, где амплитуда наиболее близка порогу принятия решения). Дискретные составляющие в сигнале с ЧПИ также оказываются компенсированными, однако выделение хронирующего сигнала несложно - сигнал легко переводится в исходный путем двухполупериодного выпрямления. Однако, если в исходной последовательности присутствуют большие пакеты нулей, выделение хронирующего сигнала существенно затрудняется. Преодоление этой трудности возможно несколькими способами.
Способ 1. В исходной последовательности осуществляется ин- версия четных (или нечетных) разрядов. При этом последовательности нулевых символов превращаются в последовательности вида «10101...» Способ применим в первичных системах, где появление в исходной последовательности комбинаций вида «10101...» (и, следовательно, превращение этих комбинаций в последовательности нулевых символов) маловероятно.
Способ 2. Исходная последовательность скремблируется. Способ применим в любых системах, но понижает надежность ЦТС за счет возможной рассинхронизации скремблера и дескремблера .Отметим, что код ЧПИ (АМ’) был первым кодом для ЦТС, рекомендованным МСЭ-Т.
6.6 Общие характеристики кодов
Рассмотрим общие принципы формирования сигналов в линии. Сигнал, передаваемый по линии, можно представить в следующем виде:
Здесь n -порядковый номер символа;
an(k) -k-e
значение символа (k![]() my);
my);
my -число уровней кода;
Si(t) -функция, описывающая форму импульсов. Для двоичного кода а(k) принимает два значения: а(1) =0, а(2)= 1, для троичного сигнала - а(1) =- 1/2, , а(2)=0, а(3) = +1/2. В общем случае при принятии нормирующих условий
![]()
остальные уровни будут иметь величину
где - аср значение символа, соответствующего среднему уровню кода.
Для симметричных кодов аср = 0, и тогда одна половина уровней принимает положительные значения, другая - отрицательные, а при нечетном числе уровней один из них (средний) принимает значение 0. При этом значения а(к) появляются с определенными вероятностями р[а(к)], которые зависят от статистических свойств исходной двоичной последовательности и типа преобразователя двоичного кода в линейный, а среднее значение сигнала можно определить следующим образом:
Статистические свойства коэффициентов а(к) и спектр Si2(ω), соответствующий форме используемых импульсов, характеризуют свойства сигнала в линии. Поэтому формирование требуемого энергетического спектра может быть осуществлено соответствующим изменением структуры импульсной последовательности и выбором импульсов нужной формы.
Учитывая, что на вероятности появления символов исходного двоичного сигнала не могут быть наложены ограничивающие условия, код, используемый в линии, должен обладать некоторой избыточностью, позволяющей удовлетворить дополнительные требования.
Будем считать элементом видеоимпульсного сигнала любое возможное сочетание видеоимпульсов и пауз внутри тактового интервала Т, отведенного для передачи одного символа информации. Если принять, что импульсы имеют прямоугольную форму, их длительность равна Т или Т/2, фронт совпадает с началом или серединой тактового интервала, а амплитуда равна А/2, то возможное число разнотипных элементов видеоимпульсных сигналов Sк(t), составит девять (см. рисунок 6.10).
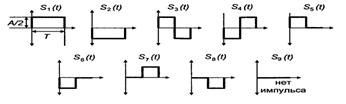
Рисунок 6.10 - Элементы
видеоимпульсных сигналов
При передаче «1» и «0» исходной информации может использоваться комбинация двух любых элементов видеоимпульсного сигнала Si(t) и Sj(t). В этом случае число двоичных видеоимпульсных сигналов С92=36. Кроме того, в ЦТС могут применяться многоэлементные видеоимпульсные сигналы (передача одного символа информации осуществляется с помощью нескольких элементов), а также многопозиционная (многоуровневая) модуляция отдельных элементов (например, для каждого элемента предусматривается несколько градаций амплитуды). Таким образом, видеоимпульсные сигналы отличаются весьма большим многообразием.
Однако следует учесть, что далеко не все видеоимпульсные сигналы отвечают требованиям, предъявляемым к цифровым сигналам, которые предназначены для передачи по линии. Вне зависимости от конкретных условий сравнение цифровых сигналов удобно производить по потенциальной помехоустойчивости при идеальных условиях, которая зависит от эквивалентной мощности Рз, элементов этого сигнала Si(t) и Sj(t), т.е.
Очевидно, предельной помехоустойчивостью будут обладать сигналы, элементы которых противоположны и удовлетворяют равенству Si(t)=-Sj(t). Таким образом, для сигналов, приведенных на рисунке 6.10, предельную помехоустойчивость можно получить только в двух случаях, - при использовании S1(t) и S2(t) (имеем «моноимпульсный» сигнал) или S3(t) и S4(t) (имеем «биимпульсный» сигнал). Все другие виды абсолютных двоичных видеоимпульсных сигналов имеют потенциальную помехоустойчивость на
2...9 дБ ниже предельного значения. Это относится и к большинству многоэлементных видеоимпульсных сигналов. Так, ранее рассмотренный сигнал с чередованием полярности импульсов ЧПИ (АМI), в котором двоичный символ «1» передается чередованием элементов S5(t) и S6(t), а 0 - пассивной паузой S9(t), имеет потенциальную помехоустойчивость на 9 дБ ниже предельной.
Кроме того, для оценки различных видов видеоимпульсных сигналов важными являются параметры, оценивающие среднее значение вероятности присутствия тактовой частоты в цифровом сигнале и устойчивость ее признаков. В таблице 6.3 для некоторых видов видеоимпульсных сигналов, кроме мощности Рэ , указаны также значения параметра рm, характеризующего среднее значение вероятности присутствия тактовой частоты в цифровом сигнале при равной вероятности передачи двоичных символов, и параметра Кт характеризующего устойчивость признаков тактовой частоты при различных предельно возможных вероятностях передачи двоичных символов, т.е. Кт = Рт мин /Рт макс
Таблица 6.3 - Средние параметры
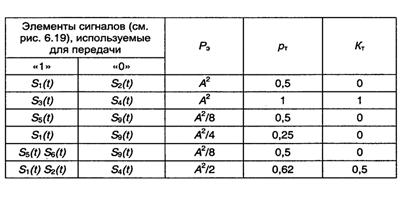
При передаче по линии сигналов, у которых Кт =0 , необходимо предусматривать некоторые дополнительные меры для повышения устойчивости признаков тактовой частоты с целью поддержания нормальных условий работы цепей тактовой синхронизации.
Из приведенных в таблице данных видно, что одним из наиболее эффективных, является биимпульсный сигнал, который благодаря сбалансированности каждого элемента S3(t) и S4(t) обладает предельной помехоустойчивостью и максимальным значением параметра устойчивости признаков тактовой частоты. Однако этот сигнал имеет относительно высокую минимальную верхнюю частоту спектра, которая определяется как первая гармоника периодической последовательности элементов сигнала. Этот недостаток может быть скомпенсирован реализацией многоуровневой модуляции элементов биимпульсного сигнала, при которой, как будет показано ниже, снижается значение тактовой частоты.
С целью повышения стабильности признаков тактовой частоты для большинства видеоимпульсных сигналов требуется дополнительное преобразование цифровой информации путем изменения ее статистических свойств. Если изменение статистических свойств исходной двоичной информации происходит при некоторых определенных условиях (например, заданном количестве подряд следующих 0), то в результате формируются так называемые неалфавитные коды. Если же статистические свойства исходной двоичной последовательности изменяются путем ее деления на группы с постоянным числом тактовых интервалов и последующего преобразования этих групп по определенному алфавиту в группы символов кода с другим основанием счисления (больше двух) и, как правило, с новым числом тактовых интервалов, то в результате формируются алфавитные коды.
Среди неалфавитных кодов наибольшее распространение получили коды типов HDBn и ВnZS, в которых последовательность двоичных «0» длиной (n+1) символов заменяется определенным сочетанием импульсов и пауз. В указанных кодах используются все три элемента сигнала ЧПИ, однако имеются нарушения условия чередования полярности импульсов. Предельная помехоустойчивость таких кодов совпадает с величиной, полученной для ЧПИ, а минимальная верхняя частота спектра увеличивается за счет сокращения числа элементов S9(t), не содержащих признаков тактовой частоты, до значения (0,6..0,7)fт. Использование алфавитных кодов позволяет не только повысить стабильность признаков тактовой частоты, но и увеличить пропускную способность ЦТС за счет соответствующего снижения значения тактовой частоты. Однако при этом требуется передача признаков, достаточных для правильного восстановления границ групп символов кода при декодировании. В названии алфавитных кодов типа nBkM приняты следующие обозначения: n - это число символов в кодируемой двоичной группе; В (Вinаry) указывает, что в исходной последовательности используется двоичное основание счисления;
k - это число символов в группе кода;
М - буква (или буквы), отражающая кодовое основание счисления, например: Т - троичное (Теrnагу),
Q - четверичное (Quaternary),
QI - пятеричное (Quinary),
S- шестеричное (Sextenary),
Н - семеричное (Heptanary) и т.д.
В соответствии со сказанным тип кода 3В2Т указывает, что каждая группа из трех двоичных символов преобразуется в соответствующую группу из двух троичных символов. Так как в этом случае применяются коды с основанием М>2, то требуется соответствующее увеличение отличительных признаков, т.е. сигнал должен быть многопозиционным. Например, при формировании k-ичных символов можно использовать k любых элементов видеоимпульсных сигналов (см. рисунок 6.10), либо один из них, но с "k" значениями амплитуды, либо оба указанных способа в комбинации. Алфавитное кодирование характеризуется избыточностью преобразования двоичной информации (2n< Мk), что обеспечивает выполнение условия независимой передачи групп двоичных символов сочетаниями (группами) М-го кода. Сравнение алфавитных кодов обычно проводится по следующим параметрам:
- числу групп двоичных символов 2n;
- числу групп символов кода Мk:
- коэффициенту изменения тактовой частоты Км = n/k
- избыточности кода r
- предельному коэффициенту снижения тактовой частоты (при r=0)
![]()
Часто избыточность кодов в ЦТС определяется как
![]() (6.3)
(6.3)
где Н — энтропия источника сообщений (сигналов), равная Н =log2N , если все сообщения (сигналы) равновероятны и объем алфавита равен N.
Однако в теории связи общепринято следующее определение избыточности:
![]() (6.4)
(6.4)
Установим расчетные соотношения для избыточности кодов на основе определения (6.4). Учитывая, что Nмакс=Мk, N = 2n, получаем
![]() (6.5)
(6.5)
а не r = (к/n)log2M - 1, как следовало из (6.3)
В некоторых случаях, например, в ЦТС на волоконно-оптических линиях связи, используются двоичные коды (М=2), в частности, код типа 5В6В. В этом случае r=1-n/k.
Большинство кодов типа nВkМ позволяет уменьшить тактовую частоту сигнала в линии. Если обозначить длительность двоичных и М-х сигналов через τ2 и τm , а тактовые частоты через f2 и fm соответственно, то получим следующие соотношения: k τ2 = nτm, fm=nf2/k, r=I-(I/τ2)/[(I/τm)log2M]; fm= f2/[(1-r)log2M];
![]()
В таблице 6.4 приведены рассмотренные параметры для некоторых алфавитных кодов.
Первые два параметра характеризуют сложность реализации операций кодирования и декодирования в преобразователях кода. Одним из наиболее оптимальных (с точки зрения технической реализации, избыточности и коэффициента снижения тактовой частоты) является код 3В2Т. Реализация кодов типов 5В2S, 8В3Н и некоторых других оказывается более сложной, но позволяет в большей степени снизить значение тактовой частоты, что порой оказывается важным для ЦТС абонентского доступа. Одним из важнейших параметров, используемых при сравнительной оценке кодов, в спектре которых практически отсутствует постояннaя составляющая, т.е. балансных кодов, является диапазон, в пределах которого может изменяться текущее значение цифровой суммы символов кодовой последовательности, которая определяется как
![]()
где i,j- любые целые числа, а аη - значение символа кода, переданного в η-м тактовом интервале.
Таблица 6.4 - Параметры для алфавитных кодов
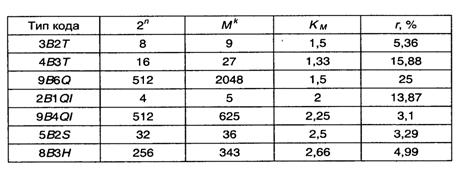
Каждому баллансному коду соответствует свой диапазон, величина которого определяет уровень низкочастотных составляющих в спектре сигнала. Если на приеме контролировать значение Zi+j , то в случае превышения им известных (для используемого кода) границ диапазона могут быть обнаружены ошибки в линейном тракте.
Общим недостатком как неалфавитных, так и алфавитных кодов является возможность размножения ошибок. На это обстоятельство, в частности, следует обращать внимание при выборе кодовых таблиц, т.е. таблиц соответствия групп двоичных символов группам символов М-го кода, общее число которых для каждого типа алфавитного кода весьма велико (оно определяется числом перестановок из 2n, т.е. (2n)!). В качестве одного из критериев окончательного выбора кодовых таблиц может быть использован критерий минимизации коэффициента размножения одиночных ошибок в процессе декодирования. Таким образом, для обеспечения высокой помехоустойчивости, пропускной способности ЦТС, а также для выполнения требований к тактовой синхронизации, целесообразно применение рассмотренных типов алфавитных и неалфавитных кодов в сочетании с моноимпульсным и биимпульсным видеоимпульсными сигналами.
Как указывалось, отмеченные выше проблемы передачи цифрового сигнала по линии могут быть решены введением избыточности в линейный сигнал. Это достигается либо за счет увеличения скорости передачи при сохранении основания кода, равного двум, либо путем использования некоторых видов многоуровневых сигналов. При этом, как будет показано ниже, скорость передачи может остаться неизменной или несколько уменьшиться.
6.7 Виды кодов в линии ЦТС различных типов
Двухуровневые коды обладают наибольшей помехозащищенностью, поскольку имеют минимальное число разрешенных уровней. Двухуровневые коды получают все большее распространение, по мере распространения волоконно-оптических линий связи, в которых, как известно, коды с другим числом уровней применения не находят. Наибольшее распространение в ЦТС на волоконно-оптических линиях получил код БВН - без возвращения к нулю (NRZ). В этом коде единичные символы передаются положительным импульсом, затянутым на тактовый интервал S1(t), а нулевые символы - таким же отрицательным импульсом S2(t). Спектр сигнала в этом коде соответствует кривой τ=Т.. Спектр относительно узок, но имеет мощные низкочастотные составляющие, которые, как известно, могут приводить к существенным межсимвольным помехам за счет линейных искажений 2-рода. Спектр не содержит дискретных составляющих, а составляющие вблизи тактовой частоты отсутствуют. Поэтому выделение хронирующего сигнала в данном случае требует преобразования кода. Код не имеет избыточности, а потому не позволяет осуществлять контроль коэффициента ошибок в процессе передачи. Следует отметить, что в оптических интерфейсах ЦТС синхронной иерархии всегда используется код БВН.
Трехуровневые коды (троичные и квазитроичные) получили широкое распространение на первых этапах развития и внедрения ЦТС. Выше рассматривались параметры сигналов в коде с чередованием полярности импульсов ЧПИ (АМI), пример последовательности импульсов в этом коде представлен на рисунке 6.11. К недостаткам этого кода следует отнести, во-первых, невысокую помехозащищенность, которая ниже помехозащищенности двухуровневых кодов на 6 дБ и, во-вторых, невозможность выделения хронирующего сигнала в случае прохождения больших пакетов нулей. Поскольку этот код предназначался для систем, работающих по кабелям с металлическими жилами, первый недостаток был не очень критическим, так как защищенность сигналов в этих кабелях относительно высока. Способы преодоления второго недостатка также рассмотрены выше, однако радикально он преодолевался в модифицированном коде с чередованием полярности импульсов МЧПИ. Другое название кода МЧПИ - КВП - код с высокой плотностью единиц (НDВ). Пример импульсной последовательности в коде КВП-3 также приведен на рисунке 6.11. МСЭ-Т рекомендует код КВП-3 для интерфейсов цифровых сетевых трактов со скоростями передачи 2, 8,5 и
34 Мбит/с.
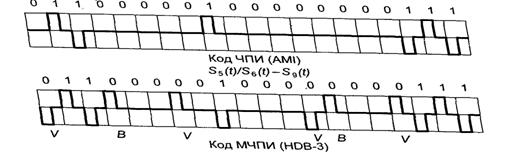
Рисунок 6.11- Коды с чередованием полярности импульсов
В коде КВП-3 осуществляется замена четырех подряд следующих нулей вставками вида 000V или В00V, где В - импульс, сохраняющий чередование полярности, а V- импульс, нарушающий чередование, согласно таблице 6.5 Выбор той или иной вставки определен условием, по которому между импульсами V должно быть нечетное число импульсов В.
Таблица 6.5 - Порядок замены пакетов нулей
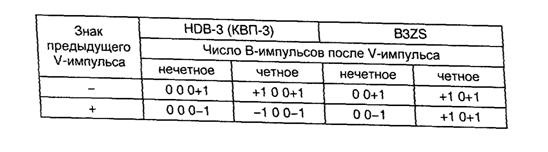
В этой же таблице приведен порядок замены пакетов нулей для другого кода - В3ZS, в котором по такому же правилу, как и для кода КВП-3, заменяется последовательность из трех нулевых символов, т.е. плотность единиц в этом коде еще выше.
МСЭ-Т для некоторых интерфейсов цифровых сетевых трактов рекомендует аналогичные коды В6ZS и В8ZS, которые предполагают замену пакетов нулей размером в 6 и 8 символов соответственно. Вид вставки кода В6ZS - 0BV0BV. Следует отметить, что применение кодов с заменой пакетов нулей определенными кодовыми комбинациями усложняет аппаратуру ЦТС.
Все трехуровневые коды имеют относительно неширокие энергетические спектры (см. рисунок 6.12), что важно при передаче по кабелям с металлическими парами, затухание которых быстро увеличивается с частотой (пропорционально корню квадратному из частоты). Возможны ситуации, когда возникновение в линейном сигнале одиночной ошибки приводит на приеме к размножению ошибок. При этом, в зависимости от типа кода в линии и конкретной комбинации символов, вместо одной ошибки в линейном сигнале могут возникнуть две, три или более ошибок в восстановленном двоичном сигнале. Например, если в последовательности символов В0ВВ (для кода КВП-3) произойдет ошибка в третьем символе (т.е. вместо символа В будет принят символ 0), то возникнет последовательность, которая на приеме будет воспринята как В00V, и на приеме при восстановлении двоичного сигнала будет сформирована последовательность 0000, т.е. вместо одной ошибки появятся три. Как показывают расчеты, в зависимости от способа обработки сигнала на приеме коэффициент размножения ошибок для данного кода может составлять от 1,18 до 1,26.
Рассмотренный выше код ЧПИ формально можно отнести к классу кодов nBkM, считая, что в данном случае n=1, k=1 и М=3, т.е. один символ двоичного кода преобразуется в один символ троичного кода 1В1Т. Коэффициент изменения тактовой частоты при этом оказывается равным 1 (т.е. тактовая частота не изменяется), а избыточность кода равна r=(1-1/log23)·100%= 37%. Избыточность в данном случае используется для контроля коэффициента ошибок по принципу - появление ошибки приводит к нарушению чередования полярности, что достаточно просто фиксируется. Парноизбирательный троичный код ПИТ (PST) может быть отнесен к блочному коду типа 2В2Т, при его применении исходная последовательность разбивается на пары символов, которые заменяются троичными комбинациями в соответствии с таблицей 6.6
Таблица6.6 - Принципы смены мод
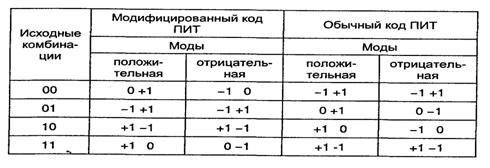
Синхронизация по парам (разделение принятого потока на пары символов) осуществляется по запрещенным комбинациям (00, +1+1,-1-1) и привязке к циклу передачи ЦТС. Смена мод осуществляется после прохождения одиночного импульса. Спектр сигнала показан на рисунке 6.12, а на рисунке 6.13 приведен пример кодирования в обычном ПИТ коде. Заметим, что при наличии в исходной последовательности больших пакетов нулей синхронизация по парам в обычном ПИТ коде может быть потеряна. В модифицированном ПИТ коде этот недостаток устранен. Избыточность в ПИТ коде, как и в коде ЧПИ, равна 37%. Весьма перспективными являются блочные коды типа nBkM, некоторые характеристики которых приведены в таблице 6.3. Поскольку в этих кодах общее число различных групп двоичных символов (2n) обычно меньше возможного числа групп М-ных символов (Мk ), то задача их формирования заключается в определении определенного соответствия между исходной информацией и кодом. Это соответствие должно обеспечивать получение необходимых свойств передаваемого сигнала и не порождать значительных технических трудностей при реализации. Для этого, как правило, используется принцип смены мод, который был рассмотрен на примере ПИТ кода .
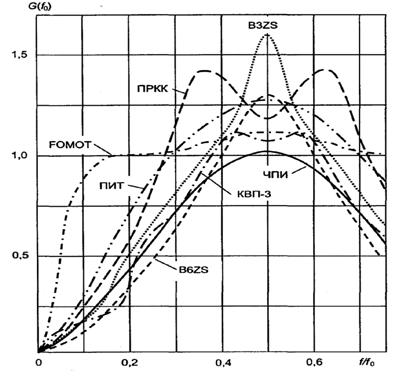
Рисунок 6.12 - Энергетические спекторы последовательности в троичном коде

Рисунок 6.13 - Парноизбирательности троичной ПИТ код
При использовании кодов типа nВkМ любая одиночная ошибка вызывает либо новое нарушение чередования полярностей, либо пропадание ранее введенного нарушения закона чередования, в результате чего возникает некомпенсированное нарушение полярностей импульсов в линии. Отмеченное обстоятельство позволяет относительно просто контролировать верность передачи информации.
В заключение укажем на код 2В1Q , который широко используется в сетях абонентского доступа, поскольку позволяет существенно снизить тактовую частоту передаваемой последовательности. При этом коде исходный поток разбивается на пары символов, каждая из которых заменяется одним из четырех импульсов, имеющих амплитуды 0, 1, 2 и 3. Коэффициент снижения тактовой частоты для этого кода равен Км = 2/1 = 2, а избыточность нулевая (r= 1 – 2lg/lg4 = 0).
Список литературы
1.Кириллов В.И. Многоканальные системы передачи: Учебник. - М.: Новое поколение, 2002.
2.Многоканальные системы передачи. Под редакцией Баевой Н.Н., Гордиенко В.Н. Учебник для вузов.- М.: Радио и связь, 1997.
3.Иванов В.И., Гордиенко В.Н. и др. Цифровые и аналоговые системы передачи: Учебник для вузов.- М.: Горячая линия - Телеком, 2003.
4.Гаранин М.В. и др. Системы и сети передачи информации: Учебное пособие для вузов.- М.: Радио и связь, 2001.
5.Джон К. Беллами. Цифровая телефония. - М.: ЭКО- Трендз , 2004.
6. Баркун М.А., Ходасевич О.Р. Цифровые системы синхронной коммутации. – М.: ЭКО - Трендз , 2001.
7.Берлин А.Н.Устройства, системы и сети коммутации.- СПБ.:Петеркон , 2003.
8.Быков С.Ф., Журавлёв В.И., Шалимов И.А. Цифровая телефония.-М.: Радио и связь, 2003.
9.Галичский К. Компьютерные системы в телефонии. Серия «Мастер систем».- СПБ.: BHV - Санкт - Петербург , 2002.
10.Гитин В.Я., Кочановский Л.Н. Волоконно - оптические системы передачи .- М.: Радио и связь , 2003.
11.Гольдштейн Б.С., Пинчук А.В., Суховицкий А.Л. IP - телефония. - М.: Радио и связь, 2001.
12.Гольдштейн Б.С. Системы коммутации. - СПБ.: БХВ - Петербург , 2002.
13.Давыдкин П.Н., Колтунов М.Н., Рыжков А.В. Тактовая сетевая синхронизация. - М.: ЭКО - Трендз , 2004.
14.Карташевский В.Г., Семенов С.Н., Фирсова Т.В. Сети подвижной связи. - М.: ЭКО - Трендз, 2001.
15.Крестьянинов С.В. и др. Интеллектуальные сети и компьютерная телефония. - М.: Радио и связь , 2001.
16.Лагутенко О.И. Современные модемы. - М.: ЭКО - Трендз , 2002.
17.Муссель К.М. Предоставление и биллинг услуг связи. – М.: ЭКО - Трендз, 2003.
18.Ратынский М.В. Основы сотовой связи .- М.: Радио и связь , 2000.
19.Феер К. Беспроводная цифровая связь : Перевод с английского под ред.Журавлёва В.И. - М.: Радио и связь , 2000.
20.Нефедов В.И. Основы радиоэлектроники и связи.- М.: Высшая школа, 2005.
21.Резникова Н.П., Демина Е.В. Менеджмент в телекоммуникациях.- М.: ЭКО -Трендз, 2005.
22.Гордиенко В.Н., Тверецкий М.С. Многоканальные телекоммуникационные системы. - М.: Горячая линия - Телеком ,2005.