Алматинский
ИНСТИТУТ ЭНЕРГЕТИКИ
И СВЯЗИ
Кафедра «Телекоммуникационных систем»
МНОГОКАНАЛЬНЫЕ ТЕЛЕКОММУНИКАЦИОННЫЕ
СИСТЕМЫ СВЯЗИ
ЧАСТЬ2
Конспект лекций
(для студентов всех форм обучения
специальностей
380240-Многоканальные
телекоммуникационные системы,
050719-Радиотехника, электроника и
телекоммуникации)
Алматы 2005
СОСТАВИТЕЛЬ: Б.Б. Агатаева.
Многоканальные системы связи. Часть 2.
Конспект лекций (для студентов всех форм обучения специальностей
380240-Многоканальные телекоммуникационные системы, 050719-Радиотехника,
электроника и телекоммуникации). – Алматы: АИЭС, 2005.
– 86с.
Конспект лекций состоит из двух
частей (часть 1 и часть 2). Часть 1 посвящена вопросам многоканальных телекоммуникационных
систем и необходима при изучении дисциплин, связанных с этой тематикой. Часть 2
конспекта посвящена вопросам многоканальных цифровых телекоммуникационных
систем. Конспект лекций предназначен для студентов всех форм обучения по
специальностям направления 380000 – Радиоэлектроника и телекоммуникации. Ил.
табл.1, 56, библиогр. – 9 назв.
Рецензент: канд.техн.наук, доц. С.В. Коньшин
Печатается по плану издания
Министерства образования и науки Республики Казахстан на 2005г.
©Алматинский институт энергетики и
связи, 2005г.
Содержание
1 Лекция №13. Принцип работы
систем передачи с временным
разделением каналов (ВРК).
Принцип построения многоканальных
систем передачи (МСП с ВРК). 4
2 Лекция №14. Основные способы аналого-цифрового преобразования
(АЦП) сигналов. 10
3 Лекция №15. Особенность построения цифровых систем передачи (ЦСП). 15
4 Лекция №16. Дельта – модуляция (ДМ). 22
5 Лекция №17. Цикловая синхронизация. 28
6 Лекция №18. Особенности цикловой синхронизации ЦСП высших
порядков.
33
7 Лекция №19. Кодеры с линейной шкалой квантования. 40
8 Лекция №20. Формирователь команды согласования скоростей (КСС). 50
9 Лекция №21. Коды, используемые в цифровых линейных трактах (ЦЛТ). 55
10 Лекция №22. Регенерация цифрового сигнала. 60
11 Лекция №23. Помехи в цифровом линейном
тракте.
65
12 Лекция №24. Плезиохронная цифровая иерархия. 73
13 Лекция №25. Устройства телемеханики (ТМ).
80
Список литературы
85
1 Лекция №13. Принцип работы систем передачи с ВРК. Принцип
построения МСП с ВРК
Цель лекции: изучение
разновидностей импульсной последовательности, а также рассмотрение принципа
построения СП с ВРК.
В системе передачи с временным разделением каналов (СП с ВРК) сигнал в
каждом канале представляет собой периодическую последовательность импульсов,
модулированных исходным сигналом. Импульсная последовательность
обладает следующими параметрами, которые перечислены на рисунке 13.1.
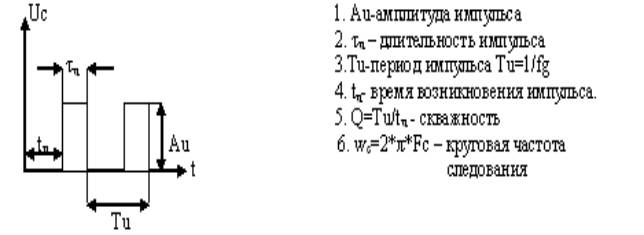
Рисунок 13.1 – Параметры импульсной последовательности
Период
дискретизации сигнала равен периоду цикла Тд=Тu, длительность каждого импульса tu должна быть не больше tu≤Тд/М, где М–максимальный уровень квантования. В
существующих системах с групповым кодированием выдерживаются очень жесткие
характеристики передачи амплитудно-импульсного
модулированного (АИМ) тракта.
В зависимости
от того, какой параметр импульсной последовательности модулируется, будет иметь
место: амплитудно-импульсная модуляция (АИМ); широтно-импульсная модуляция (ШИМ); частотно-импульсная модуляция (ЧИМ); фазо-импульсная модуляция (ФИМ); периодно-импульсная модуляция (ПИМ).
При АИМ-I рода мгновенное значение амплитуды импульса изменяется в
соответствии с изменением входного сигнала (рисунок
13.2,б).
При АИМ-II рода амплитуда импульса определяется
значением входного сигнала в тактовые моменты и остается постоянной во время передачи импульсов (рисунок 13.2,в). При больших значениях скважности различие между АИМ-I и АИМ-II родов невелико. При
ШИМ, ФИМ, ПИМ, ЧИМ амплитуды импульсов в
процессе модуляции остаются постоянными, а изменяется только один
из временных параметров импульсной последовательности. При ШИМ по закону
сообщения изменяется длительность импульсов.

ШИМ имеет два вида: односторонняя и двусторонняя. При
односторонней ШИМ
модулируется положение одного из фронтов импульсов, при двусторонней – относительно центра импульса симметрично смещаются
оба фронта.
При ФИМ форма
импульсов в процессе модуляции остается неизменной, а пропорционально
мгновенному значению модулирующего сигнала изменяется положение импульса в пределах тактового интервала. ЧИМ и ПИМ
характеризуются тем, что
в зависимости от мгновенного значения входного сигнала при ЧИМ изменяется
частота следования импульсов, а при ПИМ – их период. Спектр
ФИМ будет содержать постоянную составляющую с частотой исходного сигнала, а
также, как спектр ШИМ, бесконечное
количество гармоник частоты дискретизации,
каждая из которых будет окружена бесконечным количеством параллельных боковых
полос. Для
восстановления ФИМ сигнала необходимо использовать звено с обратной
характеристикой 1/wc. По
этой причине демодуляция ФИМ сигнала с помощью фильтра
нижних частот (ФНЧ) не
применяется, а используется комбинированный метод, в котором ФИМ преобразуется
в другие виды импульсной модуляции (АИМ
или ШИМ), затем для восстановления
используется ФНЧ.
При ШИМ, ФИМ, ЧИМ, ПИМ амплитуда
сигналов постоянна и в процессе модуляции не меняется. Поэтому ее флуктуации из-за действия помех при передаче могут быть устранены в
пункте приема, в частности, путем
амплитудного ограничения. Искажения временных соотношений у передаваемых
последовательностей невозможно устранить, а поскольку именно временные параметры
импульсных сигналов являются информационными, то есть несущими информацию о
сообщении, то в ФИМ, ЧИМ, ШИМ, ПИМ также
происходит накопление помех при передаче.
Использование
ШИМ для СП с ВРК
При ШИМ
амплитуда импульса остается постоянной, а длительность импульса изменяется по
закону модулирующего колебания. Есть ШИМ-I рода и ШИМ-II рода. При ШИМ-I рода длительность
импульсов определяется значениями модулирующей функции в моменты возникновения фронта и среза импульса, а при
ШИМ-II рода наблюдаются изменения в тактовых точках. Если длительность импульса намного
меньше периода дискретизации τи<<Тд, то разница между ШИМ-I и
ШИМ-II родов
незначительна. На практике чаще применяется ОШИМ, при
которой длительность импульсов во время модуляции
сигналом определяется по формуле Uc(t)=Umax*sinwct (13.1)
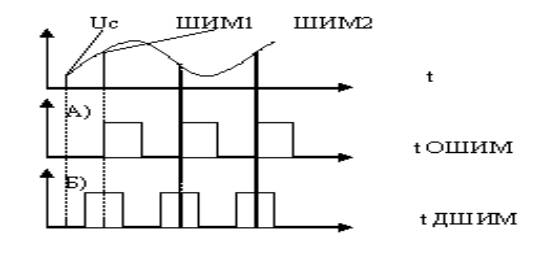
Рисунок 13.4 – Виды модуляции: а)
односторонняя; б)
двусторонняя
Ширина τu импульса выражается следующим образом
τu= τоu+ Δτmax*sinwct, (13.2)
где τоu–среднее значение длительности
импульса;
Δτmax–максимальное отклонение фронта
импульса. Подставив формулу (13.2) в формулу (13.1), получим по теории Бесселевых следующее
преобразование
Uшим(t)=Au/qo+(Au*Δτmax*sinwct)/Tд+2Au/π* , 
![]() , (13.3)
, (13.3)
где βk=kπ∆τmax/Tд;
q0=Tд/τ0;
n-N–пары боковых полос;
k–гармоники дискретизации;
wc – частота
сигнала;
wq – частота дискретизации.
Таким образом, спектр ШИМ
будет соединять постоянную составляющую с частотой сигнала (wс), бесконечное количество гармоник частоты дискретизации (wg), каждый из которых, в
отличие от АИМ, будет
окружен бесконечным количеством пар боковых полос, имеющих частоту, равную кwg+(-nwc). Восстановление
исходного сигнала возможно с помощью
ФНЧ (или ПФ), которая будет
выделять из всего спектра ШИМ сигнала составляющую в ширине полосы исходного
сигнала. Спектр ШИМ сложнее, чем у АИМ. Помехозащищенность
СП с ШИМ будет выше, чем СП АИМ, так как все
импульсы имеют одинаковую амплитуду, а помеха в
свою очередь меняет амплитуду сигнала. ФИМ
является более помехозащищенной. В этом случае
и длительность, и амплитуда
импульса остаются
постоянными, меняются только
время возникновения (tu) и
фаза импульса tu=f(Uc).
При ЧИМ в
зависимости от величины модулируемого сигнала изменяется частота следования
импульсов, спектр ЧИМ аналогично спектру ФИМ,
но помехозащищенность ЧИМ ниже, чем у ФИМ, и сложнее аппаратная реализация. Поэтому СП с ЧИМ практически не
используется.
Спектры АИМ
сигнала
При АИМ
амплитуда периодической последовательности изменяется в соответствии с
модулированным сигналом. В этом случае периодическая последовательность
выполняет функции переносчика. Частота этой импульсной последовательности равна
частоте дискретизации и определяется в соответствии с теоремой Котельникова.
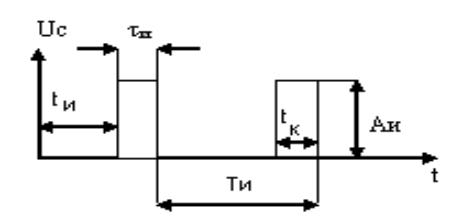
Рисунок 13.5 – Параметры импульсной последовательности
Спектр этой импульсной последовательности получается путем
разложения в ряд Фурье и выглядит следующим образом
∞
Uo(t)=Au(1/q+2/π*∑((sinkπ/q)/k)*coskwqt) (13.4)
K=1
В спектре этой последовательности
будут гармоники (а не несущие) с частотами дискретизации. В отличие от системы с ЧРК, где несущая составляет одно гармоническое
колебание, в данном случае получается, что мы
модулируем не одну несущую, а много несущих сразу, частоты которых кратны частоте
дискретизации. Полагая, что модулирующие колебания имеют вид
Uc(t)=Um*sinwt . (13.5)
Тогда величина
изменения во времени АИМ сигнала равна
Uаим(t)=(1+mАИМ*sinwct)*Uo(t), (13.6)
где mАИМ=Um/Au–глубина модуляции. Спектр АИМ колебания представляется в виде

(13.7)
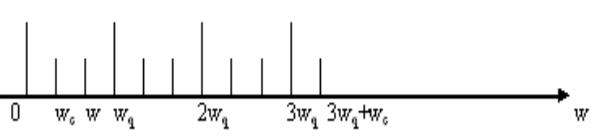
Рисунок 13.6 – Спектр АИМ
В качестве
модулируемого сигнала используется сигнал ТЧ, лежащий в диапазоне от wmin до wmax (см.рисунок 13.7).
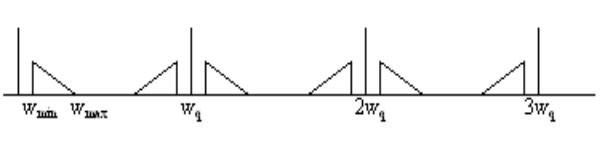
Рисунок 13.7– Диапазоны, в
которых могут находиться сигналы ТЧ, используемые в качестве модулируемых
Восстановление
исходного сигнала может быть
осуществлено двумя способами: можно выделить
составляющую с fсигн с
помощью ФНЧ, т.е. путем выделения огибающей; можно выделить
какую-либо боковую составляющую частоты дискретизации с помощью ПФ и провести
ее восстановление методами ЧРК wq≥2wmax .
Преобразование
сигналов в ЦСП. Основные характеристики каналов и трактов
Таким образом, за время цикла можно передать информацию нескольких
каналов, т.е.
М =
Тц/tk,
(13.8)
tk= Tд/(N+1) (13.9)
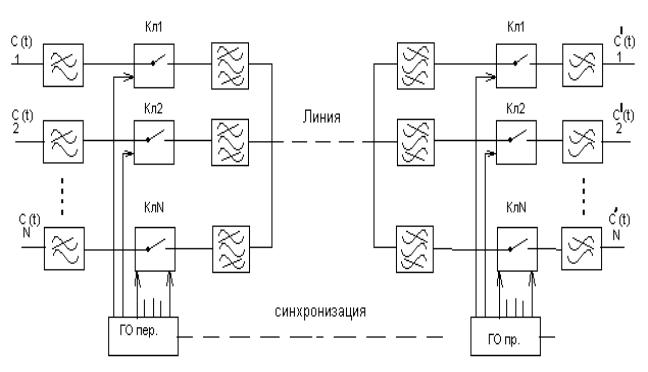
Рисунок 13.8 – Многоканальная
система передачи с ВРК
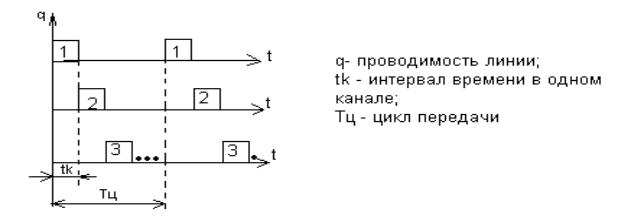
Рисунок 13.9 – Схема цикла передачи
Метод ВРК
применяется для передачи дискретных и аналоговых сигналов. Возможность передачи
непрерывных периодических сигналов отдельными их значениями, взятыми в
определенные моменты времени основывается на теореме В.А.Котельникова, согласно
которой непрерывный сигнал с ограниченным спектром f определяется своими мгновенными значениями, взятыми
через интервал времени, т.е. T≤1/2fmax. При
передаче информации с ВРК необходимо
обеспечить синхронную работу генераторных оборудований (ГО) передающей и приемной станций. Необходимо,
чтобы ключи соответствующих каналов на приеме открывались в момент поступления
импульсов данного канала. Исходный сигнал С(t) пропускается
через ФНЧ, чтобы ограничить его спектр. После сигнал подается на электронный
ключ, замыкание которого осуществляется по сигналу с РИК, и данный канал на
время длительности импульса подключается к линейному тракту (сети). И в
результате кратковременного замыкания ключа получаем АИМ сигнал,
промодулированный нашим сигналом. Ключами других каналов управляет импульсная
последовательность такой же частоты дискретизации fд, но сдвинутая во времени относительно импульсной
последовательности первого канала. На приемной стороне приемника синхросигналов (ПрСС)
выделяется
этот импульс,
и он подается на РИК. После электронного
ключа (ЭКл) получается АИМ сигнал соответствующего канала. Помехозащищенность такой
СП ВРК весьма низка, т.к. помеха изменяет амплитуду сигнала, непосредственно внося искажения. Поэтому для цепи
повышенной помехозащищенности ВРК с АИМ
в чистом виде не используется, а используются другие формы модуляции, то есть
ШИМ и ФИМ.
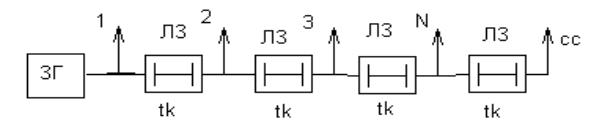
Рисунок 13.10 – Распределитель импульса каналов (РИК)
РИК
организуется с помощью линии задержки. Основными элементами являются линии задержки (ЛЗ) с отводами. На приеме ключ соответствующих каналов должен
работать синхронно с ключами передатчика. Для обеспечения синхронности в линию
передается синхросигнал, т.е. импульс, по каким-то параметрам отличающийся от импульса
канального сигнала (информационный сигнал). Этот импульс формируется в
формирователе СС и добавляется в цифровой тракт.
2 Лекция №14. Основные
способы аналого-цифрового преобразования (АЦП)
сигналов
Цель лекции: изучение основных
способов аналого-цифрового преобразования сигналов, дискретизации сигналов по
времени, квантования сигналов по амплитуде, кодирования квантованных сигналов.
Наиболее
распространенным способом цифрового преобразования аналоговых сигналов является
импульсно-кодовая модуляция (ИКМ). ИКМ используется
во всех разработках канальной аппаратуры (КА) ЦСП и
обеспечивает высокое качество передачи сигналов. Однако наряду с ИКМ все чаще
применяются другие методы АЦП, которые позволяют небольшим снижением качества,
зачастую незаметным для потребителя, уменьшить скорость передачи сигналов и тем
самым повысить пропускную способность цифровых каналов.
Методы
кодирования постоянно совершенствуются,
поэтому рассмотрим основные принципы наиболее используемых методов ИКМ, а также
дифференциальной модуляции (например, ДМ и
ДИКМ), при которой также проводятся дискретизация, квантование и кодирование. При ДМ передается информация лишь о знаке приращения. На
приемной стороне приращение определяется заданным шагом квантования. Достаточно
передавать один двоичный символ на каждый отсчет сигнала. При ДИКМ передается
информация о знаке приращения и его квантованное значение кодовой
комбинацией из нескольких импульсов.
Импульсно-кодовая модуляция
В 30-х годах
французский инженер А.Ривс предложил принцип ИКМ, а настоящее развитие данный принцип получил только в начале 1956
года.
В системах с
ИКМ, как и в системах с ВРК, в тракт передачи передаются лишь отдельные
значения аналоговых сигналов, взятые в определенные моменты времени, т.е. происходит
дискретизация сигналов по времени (рисунок 14.1). Это
наиболее распространенный метод цифровой модуляции.
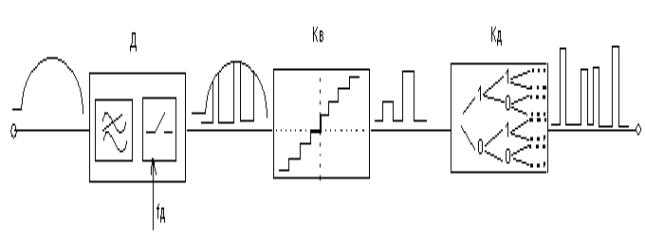
Рисунок 14.1 – Система передачи с ИКМ
Для
осуществления ИКМ необходимо произвести три операции: дискретизация сигналов по времени (получаем АИМ сигнал); квантование
полученных импульсов по амплитуде; кодирование
квантованных по амплитуде импульсов. Дискретизация
по времени состоит в том, что аналоговый сигнал заменяется АИМ сигналом, амплитуда импульсов в
котором равна
соответствующему мгновенному значению информационного сигнала в соответствующие
моменты времени. Частота
дискретизации Fд выбирается на основании теоремы
Котельникова Fд≥2Fверх. Когда ширина спектра меньше октавы, т.е. 2Fmin>Fmax, то Fmax≤Fд≤2Fmin. После дискретизации полученный АИМ сигнал подвергают квантованию по уровню (или по
амплитуде).
Для передачи
непрерывных сообщений используют метод ИКМ. Речевые и другие непрерывные
сигналы в аппаратуре с ИКМ преобразуются в дискретные.
Во-первых,
осуществляется дискретизация сигналов
по времени, то есть непрерывный сигнал заменяется совокупностью его
последовательных отсчетов.
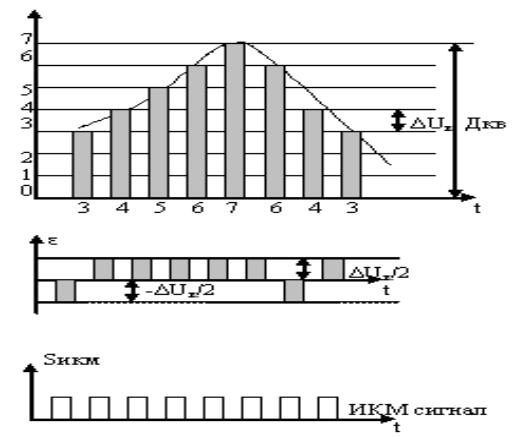
Рисунок 14.2 – Квантование по уровню: 0-7 – шкала квантования; Дкв
– динамический диапазон квантования; ΔUк
– шаг квантования
Во-вторых, непрерывное
множество значений сигнала заменяется дискретным множеством значений,
разрешенных для передачи. Это операция называется квантованием или
дискретизацией по уровню, а
разрешенные значения сигнала –
уровнями квантования. В-третьих,
полученные уровни квантования кодируются. Под кодированием понимается процесс
преобразования квантованных по уровню отсчетов сигнала в последовательность
кодовых групп. Кодовая
группа представляет собой совокупность импульсных посылок, выражающих некоторое
число, например, порядковый номер уровня квантования в определенной системе счисления.
Таким
образом, в системах связи с ИКМ непрерывный сигнал источника информации для
передачи по линиям связи преобразуется в цифровую последовательность. На
приемной стороне производится обратное цифро-аналоговое преобразование сигналов
(декодирование). Систему связи с ИКМ
можно назвать цифровой системой передачи непрерывных сообщений. Если расстояния между параллельными линиями одинаковые, то квантование равномерно. Расстояние
между верхней и нижней линиями этой системы линий определяется динамическим диапазоном дискретизированного сигнала. Если расстояния между параллельными
линиями одинаковые, то квантование
называется равномерным. Каждая из параллельных линий представляет собой уровень квантования. Сущность квантования состоит в том, что мгновенным
значениям амплитуды импульсов присваиваются
ближайшие разрешенные значения сигнала. Так как в процессе квантования значение квантованного сигнала отличается от истинного значения
сигнала в соответствующие моменты времени, то возникает ошибка квантования,
которая при данном способе квантования равна
εmax=ΔUкв/2 и
называется шумом квантования.
В процессе
квантования возможно появление шумов ограничения, когда амплитуда
дискретизирующего сигнала превышает максимально возможный уровень квантования.
Цифровые
сигналы систем ИКМ могут передаваться по проводным линиям связи непосредственно
в виде спектра. Для
передачи этих сигналов по радиолиниям предусматривается вторая ступень
модуляции, например, АМ, ЧМ, ФМ и
т.д. Радиосигналы
различных систем в свою очередь могут объединяться по принципам частотного или
временного уплотнения. Так в современных спутниковых сетях связи с
многостанционным доступом
предусматривается импульсно-кодовая обработка сигналов.
Таким образом, возникающие в процессе квантования ошибки (отличие
амплитуд), равные разности амплитуд отсчета и квантованного сигнала, то есть
ξ=Uкв-Uc, приводят к возникновению искажений, эти искажения на приемном
конце создают помехи, накладывающиеся на сигнал и исчезающие вместе с ним. Эти
помехи называются шумами квантования. Максимально возможная ошибка квантования
ξmax=ΔUк/2 и называется шумом квантования.
Теоретические
и экспериментальные исследования показали,
что шум квантования является случайным процессом. При равномерном квантовании в
интервале от -ΔUк/2 до
+ΔUк/2
плотность распределения значений ошибки можно считать постоянной и равной 1/ΔUк. Так как
ошибка квантования, вероятностью
равной единице, находится внутри интервала шириной ΔUк, поэтому можно считать, что средняя мощность (Pш.к.) шума
квантования определяется только шириной шага квантования ΔUк. Чем ΔUк
меньше, тем меньше средняя мощность шума квантования. Pш.к. =ΔUк/12. При квантовании возможно появление и шумов
ограничения. Эти шумы возникают в тех случаях, когда амплитуда
дискретизированного импульса превышает максимально возможный уровень
квантования. Величина шумов ограничения при заданном значении максимального
уровня квантования зависит только от уровня передаваемого сигнала и,
следовательно, может быть уменьшена до любого требуемого значения
соответствующим выбором величины этого уровня.
СП с ИКМ в
нашей стране впервые стала применяться в
1971г. для организации между
районированными АТС, при этом эти системы были кабельные (кабель ТТ). В 1980г. данные СП нашли применение в составе
внутризоновой первичной сети, причем они были оптическими, т.е. ИКМ сигналы
передавались по оптическому волокну. В 1990г. данные СП стали наземно радиорелейными. В конце 90-х годов вышеуказанные СП начали применяться в составе магистральной
первичной сети в Казахстане,
а за рубежом в середине 70-х годов
прошлого столетия оптические системы передачи ИКМ начали применяться в составе
международной первичной сети. Начиная с 2000г., в Казахстане СП с ИКМ применяется для организации абонентских
линий в составе ГТС под названием РСМ.
Кодирование
ИКМ сигнала
Формирование
ИКМ сигнала заканчивается
кодированием, т.е. превращением отдельных импульсов квантованного сигнала в
кодовую группу, представляющую собой комбинацию цифровых символов. Организационный
процесс, при котором колебания символов превращаются в
импульсы квантованного сигнала, называется декодированием. Эта процедура
осуществляется в кодерах и декодерах (кодек). Кодом называется закон, устанавливающий соответствие между
уровнем квантованной амплитуды и составом кодовой группы. Различают равномерный
и неравномерный коды. Если кодовая группа состоит из одинакового числа
символов, то код называется равномерным. Если из неодинакового числа
символов – неравномерным.
В системах
ИКМ (РСМ – пульсируемая кодовая модуляция) организуется равномерный двоичный
код. Для передачи всех возможных значений квантованного АИМ сигнала необходимо,
чтобы число уровней квантования было ≤2m, где
m – разрядность кода. Например, если
число уровней квантования равно 8 , то код
будет трехразрядным, так как 23=8. Кодирование бывает
симметричным и асимметричным. При асимметричном
кодировании используются натуральные двоичные коды в виде 1,2,4,8,16 и т.д. (таблица
14.1).
Таблица 14.1 – Виды
кодов
|
Асимметричный |
|
Симметричный |
Рефлексный код (Код Грея) |
||||||||||||||||||
|
1 |
|
2 |
|
3 |
|
|
|||||||||||||||
|
0 |
0 |
0 |
0 |
0 |
7 |
7 |
0 |
1 |
1 |
1 |
|
0 |
0 |
0 |
0 |
0 |
|
|
|||
|
1 |
0 |
0 |
0 |
1 |
|
6 |
0 |
1 |
1 |
0 |
|
1 |
0 |
0 |
0 |
1 |
|
|
|||
|
2 |
0 |
0 |
1 |
0 |
|
5 |
0 |
1 |
0 |
1 |
|
2 |
0 |
0 |
1 |
1 |
|
|
|||
|
3 |
0 |
0 |
1 |
1 |
|
4 |
0 |
1 |
0 |
0 |
|
3 |
0 |
0 |
1 |
0 |
|
|
|||
|
4 |
0 |
1 |
0 |
0 |
|
3 |
0 |
0 |
1 |
1 |
|
4 |
0 |
1 |
1 |
0 |
|
|
|||
|
5 |
0 |
1 |
0 |
1 |
|
2 |
0 |
0 |
1 |
0 |
|
5 |
0 |
1 |
1 |
1 |
|
|
|||
|
6 |
0 |
1 |
1 |
0 |
|
1 |
0 |
0 |
0 |
1 |
|
6 |
0 |
1 |
0 |
1 |
|
|
|||
|
7 |
0 |
1 |
1 |
1 |
|
0 |
0 |
0 |
0 |
0 |
|
7 |
0 |
1 |
0 |
0 |
|
|
|||
|
8 |
1 |
0 |
0 |
0 |
|
0 |
1 |
0 |
0 |
0 |
|
8 |
1 |
1 |
0 |
0 |
|
|
|||
|
9 |
1 |
0 |
0 |
1 |
|
1 |
1 |
0 |
0 |
1 |
|
9 |
1 |
1 |
0 |
1 |
|
|
|||
|
10 |
1 |
0 |
1 |
0 |
|
|
1 |
0 |
1 |
0 |
|
10 |
1 |
1 |
1 |
1 |
|
|
|||
|
11 |
1 |
0 |
1 |
1 |
|
3 |
1 |
0 |
1 |
1 |
|
11 |
1 |
1 |
1 |
0 |
|
|
|||
|
12 |
1 |
1 |
0 |
0 |
|
4 |
1 |
1 |
0 |
0 |
|
12 |
1 |
0 |
1 |
0 |
|
|
|||
|
13 |
1 |
1 |
0 |
1 |
|
5 |
1 |
1 |
0 |
1 |
|
13 |
1 |
0 |
1 |
1 |
|
|
|||
|
14 |
1 |
1 |
1 |
0 |
|
6 |
1 |
1 |
1 |
0 |
|
14 |
1 |
0 |
0 |
1 |
|
|
|||
|
15 |
1 |
1 |
1 |
1 |
|
7 |
1 |
1 |
1 |
1 |
|
15 |
1 |
0 |
0 |
0 |
|
|
|||
|
|
8 |
4 |
2 |
1 |
|
|
8 |
4 |
2 |
1 |
|
|
8 |
4 |
2 |
1 |
|
|
|||
Рефлексный
код (код Грея) применяется при кодировании сигнала стандартных групп СП с ЧРК. Таблица 14.1
составлена для четырехразрядного
кода, с помощью которого можно
отобразить S=24=16
квантованных уровней. Внизу таблицы 14.1 показан
вес разрядов кода. Асимметричным кодом можно кодировать однополярный сигнал. Когда
мы имеем двухполярный сигнал, то для его кодирования с помощью асимметричного
кода нужно к этому сигналу добавить постоянную составляющую, равную половине
динамического диапазона квантования, т.е. сделать его однополярным. При натуральном двоичном коде
кодированные группы значительно отличаются
друг от друга. Символы кодовых групп соседних уровней квантования в центре амплитудной характеристики (АХ) квантования должны отличаться
в минимальном числе разрядов. Если это положение не соблюдается, то имеют место значительные ошибки, поэтому при
передаче телефонных сигналов в последнее время отдают предпочтение симметричным
двоичным кодам. В этих кодах первый разряд кодовой группы содержит информацию о
знаке отсчета кодовой
группы, последующие разряды являются информационными. Так как при кодировании
малых амплитуд квантованного сигнала используются
малые разряды кода, то в центре АХ ошибки снижаются. При этом коде входные
сигналы или шумы, амплитуда которых меньше ΔUк/2, не передаются.
Значительно
снизить искажения из-за ошибок при кодировании позволяет рефлексный код, как
видно из таблицы 14.1, кодовые
группы, соответствующие соседним уровням квантования, отличаются только в одном
разряде кода, поэтому ошибка кодирования не превышает шага квантования. Этот
код применяется при кодировании сигнала стандартных групп СП с ЧРК. При формировании кода нежелательно, чтобы соседние
уровни квантования отличались больше, чем
на одну единицу в кодовом слове. В этом случае используют специальные коды, в
которых соседние уровни квантования различаются не более чем на один разряд.
ИКМ за
рубежом и в нашей стране подтвердила высокое качество, стабильность
характеристик и хорошую помехозащищенность каналов. Также ИКМ служат основой
для создания интегральной сети, они легко сочетаются с
электронными коммутационными станциями.
3 Лекция №15. Особенность
построения цифровых систем передачи (ЦСП)
Цель лекции: рассмотрение вопросов
об особенностях построения цифровых сигналов, а также о скорости передачи
сигналов и разновидностей кодеков.
В построении ЦСП существуют следующие преимущества:
- высокая помехоустойчивость. Представление информации в
цифровой форме, т.е. в виде последовательности символов с
малым числом разрешенных уровней, позволяет осуществлять регенерацию
(восстановление) этих символов при передаче их по линии связи, что резко
снижает влияния помех и искажений на качество передачи информации;
- слабая зависимость качества передачи от длины линии связи.
В пределах каждого регенерационного участка искажения передаваемых сигналов
оказываются ничтожными. Длина регенерационного участка и оборудование
регенератора при передаче сигналов на большое расстояние остаются практически такими же, как и в случае передачи
на малые расстояния. Так, при увеличении длины линии в 100 раз для сохранения
неизменными качества передачи информации достаточно уменьшить длину участка
регенерации лишь на несколько процентов;
- стабильность параметров ЦСП. Стабильность и идентичность
параметров каналов (остаточного затухания, частотной и амплитудной
характеристик и др.) Стабильность параметров каналов в таких системах
значительно выше, чем в аналоговых;
- эффективность использования пропускной способности каналов
для передачи дискретных сигналов. Например, если используются временные позиции, соответствующие только одному
каналу ТЧ, то скорость передачи дискретных сигналов будет близка к 64 кбит/с, а время, как и в аналоговых
системах обычно не превышает 9,6 кбит/с;
- возможность построения ЦСС, ЦСП в сочетании с цифровыми
коммутационными станциями является основой
цифровой сети связи, в которой передача, транзит и коммутация сигналов
осуществляются в цифровой форме;
- высокие технико-экономические показатели. Передача и коммутация сигналов в цифровой форме
позволяют реализовывать весь аппаратурный комплекс цифровой сети на чисто
электронной основе с широким применением цифровых интегральных схем. Это
позволяет резко уменьшать трудоемкость изготовления оборудования, добиваться
высокой степени унификации узлов оборудования, значительно снижать его
стоимость, потребляемую энергию и габаритные размеры. Существенно упрощается
эксплуатация систем и повышается надежность оборудования.
Основные
особенности системы связи с ИКМ
Внедрению новых типов систем связи предшествует комплексное
изучение и разработка вопросов технической
целесообразности применения этих систем, качество передачи, экономичности,
эксплуатации и т. д. Системы связи с ИКМ обладают рядом технических,
экономических и эксплуатационно-технических преимуществ перед системами
аналогового типа. Основное преимущество систем связи с
ИКМ – это их высокая помехоустойчивость. Возможность регенерации сигналов в значительной мере
ослабляет накопление помех вдоль магистрали, что позволяет существенно
увеличить дальность связи при сохранении требуемого качества передачи. Уровень
шумов и искажений в системах с ИКМ в основном определяется оконечными устройствами;
адиативные помехи, мгновенные
значения которых по абсолютной величине меньше порога срабатывания
регенератора, подавляются. Системы связи с ИКМ хорошо приспособлены для
высокоскоростной передачи данных. Существующие
каналы связи аналоговых систем позволяют
передавать данные со скоростью 600–2400 бод. В системах связи с ИКМ
скорость передачи двоичной информации в
одном канале составляет 50–60 тыс. бод, в связи с чем существует
возможность непосредственного высокоскоростного ввода данных в линейный тракт, минуя каналообразующее оборудование системы.
В настоящее
время затраты на организацию многоканальной связи с помощью аппаратуры с ИКМ ниже затрат на прокладку новых кабелей, с длиной от
8–15 км. При такой
длине кабеля применение аппаратуры с ИКМ
оказывается более экономичным, чем применение аппаратуры ЧРК ГТС. Снижение
стоимости полупроводников приборов и интегральных схем ведет к снижению
стоимости оборудования систем с ИКМ.
Качество
связи (параметры телефонного канала) не
зависит ни от колебаний затухания в линии, ни от искажений, обусловленных
нелинейностью тракта. Стабильность остаточного затухания, высокая степень идентичности частотных характеристик и
времени замедления разных каналов системы создают значительные эксплуатационные
удобства при коммутации каналов. Приспособленность ЦСП к микроминиатюризации (интегральные
схемы) позволяет обеспечить высокую надежность аппаратуры, снизить габаритные размеры, массу, а также производственные и
эксплуатационные расходы.
Основным
недостатком систем связи с ИКМ является то, что требуется
полоса частот более широкая, однако
именно эта особенность СС с ИКМ
позволяет использовать линейные тракты низкого качества (с малым переходным
затуханием, большим коэффициентом отражения и т.д.), так как
полоса передаваемых частот выгодным образом обменивается на отношение сигнал/помеха. Нужно отметить следующие преимущества
ЦСП:
а) все типы
передаваемых сигналов объединяются и разделяются на основе принципов временного
уплотнения;
б) возможность преобразования импульсных последовательностей
(перекодирование) в пунктах
транзита и ответвления цифровых потоков
без искажений, свойственных переприему по низкой частоте или ЦАП и АЦП;
в) для восстановления параметров импульсных сигналов,
искаженных в результате прохождения по линии, используется принцип регенерации.
Линейный кодер поразрядного сравнения
Наибольшее
распространение в СП с ИКМ среди линейных кодеков
получает кодер поразрядного сравнения. В процессе кодирования
происходит сравнение величины отсчета сигнала с эталонными напряжениями,
пропорциональными весу кода. Число последовательных операций
сравнения равно числу разрядов кода. Величина отсчета сигнала Uc выражается в виде суммы
определенного набора эталонных напряжений, то есть
 , (15.1)
, (15.1)
где Uэmi–это напряжение i-го разряда;
аi–кодовый символ i-го разряда;
m–число разрядов.
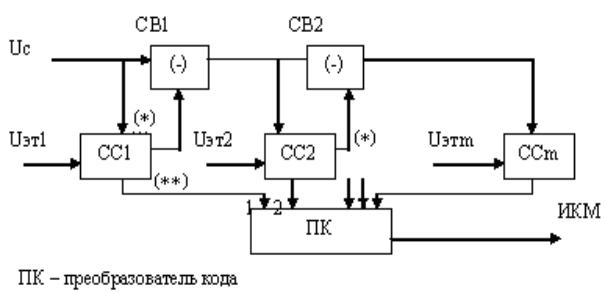
Рисунок 15. 1 – Линейный кодер поразрядного сравнения
Таблица 15.1
|
|
* |
** |
|
Uc>Uэт |
0 |
1 |
|
Uc<Uэт |
0 |
0 |
В начале
цикла кодирования на схеме сравнения СС1
подается напряжение сигнала Uc (кодируемого), а на другой вход схемы сравнения СС1 подается эталонное напряжение
наибольшего веса Uэт1=2m-1ΔUк. Если Uc>Uэт1, то на
выходе схемы сравнения СС1
появляется Uэт1(*),
которое подается в схему вычитания СВ1 ,
где вычитается из Uc, т.е. Uc-Uэт1. В этом
случае на выходе второй схемы сравнения СС2 формируется единица – первый символ кодовой группы. На схемах СС2 и
СВ2 второго каскада будет
подаваться напряжение Uc-Uэт1, которое в схеме сравнения СС2 будет сравниваться с эталоном следующего веса Uэт2=2m-2ΔUк. Если же Uc<Uэт1, то на
выходе (*) схемы сравнения СС1 сигнал появляться не будет. В этом случае на выходе 2 схемы сравнения СС1 будет формироваться первый символ «ноль». На схемах СВ2 и
СС2 второго каскада будет
подаваться напряжение Uc,
которое также будет сравниваться с Uэт2.
Следующие каскады работают аналогично. Преобразователь
кода (ПК) преобразует получаемый параллельный код в последовательный, в котором сигналы передаются последовательно
по времени по одному проводу. От величины эталонного
напряжения Uэт
будет зависеть,
каким будет являться
кодер: линейным или нелинейным. Когда
используется одно эталонное Uэт1, а
остальные Uэт
получаются посредством
его деления пополам, то будем
иметь линейный кодер, а если уровень последующих Uэт формировать
по какому-то другому закону (напряжение
через компандер), то получим нелинейный кодер.
В настоящее
время в системах РСМ наиболее широкое распространение получили нелинейные кодеки взвешивающего типа АХ, которые представляют
собой 13 - сегментную аппроксимацию квазилогарифмических функций типа А87,6/13. Эта характеристика соединяет 16 сегментов по 8 в
положительной области, и по 8 в отрицательной
области, аппроксимирующих квазилогарифмическую функцию. Два положительных и два отрицательных центральных
сегмента имеют одинаковый наклон и равные шаги квантования, поэтому их считают
единым сегментом, а аппроксимацию – 13-ти сегментной.
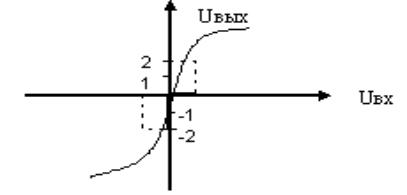
Рисунок 15.2 – АХ нелинейных кодеков
В пределах
каждого сегмента шаг квантования постоянен, и в данном сегменте укладывается 16
шагов квантования. Номер шага квантования в пределах сегмента определяется
методами линейного квантования. Величина шага квантования в зависимости от номера сегмента определяется по формуле

где ΔU – шаг квантования
в центральном сегменте. Из этой
зависимости видно, что при переходе
от одного сегмента к другому шаг квантования удваивается, начиная с
центрального. Таким
образом, уровни квантования, соответствующие нижним
границам сегмента, будут
равны 0, 16ΔUo, 32ΔUo и т.д.
В таблице 15.2 приведены значения
четырехэталонных сигналов, с помощью которых в каждом сегменте
формируются 16 уровней квантования.
Таблица 15.2
|
Сегмент |
Двоичный код |
Шаг квантования |
Эталонная и
нижняя границы |
|
1 |
000 |
ΔUo |
0 |
|
2 |
001 |
ΔUo |
16ΔUo |
|
3 |
010 |
2ΔUo |
32ΔUo |
|
4 |
011 |
4ΔUo |
64ΔUo |
|
5 |
100 |
8ΔUo |
128ΔUo |
|
6 |
101 |
16ΔUo |
256ΔUo |
|
7 |
110 |
32ΔUo |
512ΔUo |
|
8 |
111 |
64ΔUo |
1024ΔUo |
Число уровней
квантования при кодировании однополярных сигналов по таблице 15.2 равно 128. Эти уровни могут быть сформированы с
помощью одиннадцати эталонных напряжений и
отображены с учетом необходимости кодирования полярности отсчета с помощью 8-разрядной кодовой группы. Старший разряд кода несет
информацию о знаке (+ или - ). Следующие
3 разряда кода несут информацию о номере сегмента. Последние 4
разрешенных кода создают информацию
о номере отсчета в пределах сегмента. После этого определяется номер сегмента в
три такта. В первом такте кодируется амплитуда отсчета Uc, сравнивается с эталонным напряжением нижней границы пятого сегмента (Uэт5=128ΔUo). Оставшаяся часть таблиц
делится опять пополам и снова сравнивается с уровнем сегмента.
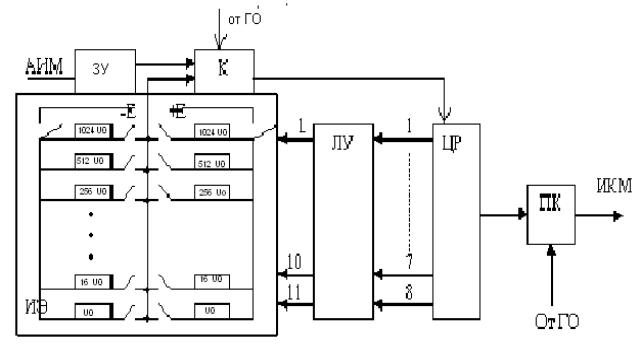
Рисунок 15.3 – Функциональная схема
нелинейного кодера взвешивающего типа
К –
компаратор, который определяет полярность отсчета и знак
разности между амплитудой кодируемого отсчета и суммой эталонных напряжений. После каждого такта кодирования решение компаратора
записывается в цифровой регистр (ЦР).
В зависимости от решения компаратора ЦР выбирает полярность источника элемента (ИЭ) и
управляет работой цифровой логики, которая преобразует разрядный код в 11-разрядный и формирует в блоке выбора и коммутации
эталонных напряжений цепи управления источника
эталонов (ИЭт), определяя величины эталонов,
подключаемых на вход 2 компаратора. Кодирование
занимает восемь тактов. В каждом такте ЦР выставляет
пробную единицу в соответствующий разряд выходного слова, которое начинается со старшего. Все остальные равны нулю, т.е. на
выходе ЦР формируется 8-разрядный
код, управляющий ЛУ. ЛУ по
этому коду замыкает соответствующие ключи в ИЭт. В
результате на выходе ИЭт
появляется эталонный сигнал, который сравнивается в компараторе с кодированным сигналом. Если Uc>Uэт, то на выходе K![]() 0 , что говорит о том, что единица, выставляемая ЦР в
соответствующем разряде была верная, и она остается на этом месте. Когда на выходе K
0 , что говорит о том, что единица, выставляемая ЦР в
соответствующем разряде была верная, и она остается на этом месте. Когда на выходе K![]() 1, это значит, что 1, выставляемая ЦР в соответствующем разряде, была ошибочной, и она заменяется на нуль и т.д. ПК
преобразует параллельный код в
последовательный код следующим образом: 11100010=576DUo. Например, Uвх=606DUo, то ошибка квантования равна: DU=606-576=30DUo.
1, это значит, что 1, выставляемая ЦР в соответствующем разряде, была ошибочной, и она заменяется на нуль и т.д. ПК
преобразует параллельный код в
последовательный код следующим образом: 11100010=576DUo. Например, Uвх=606DUo, то ошибка квантования равна: DU=606-576=30DUo.
При данном
способе кодирования величина
ошибки квантования находится в пределах от
0 до DUi, где DUi –
шаг квантования в соответствующем сегменте. По окончании восьми
тактов кодирования сформированный в ЦР код через ПК в последовательном виде
выделяется на нужное устройство.
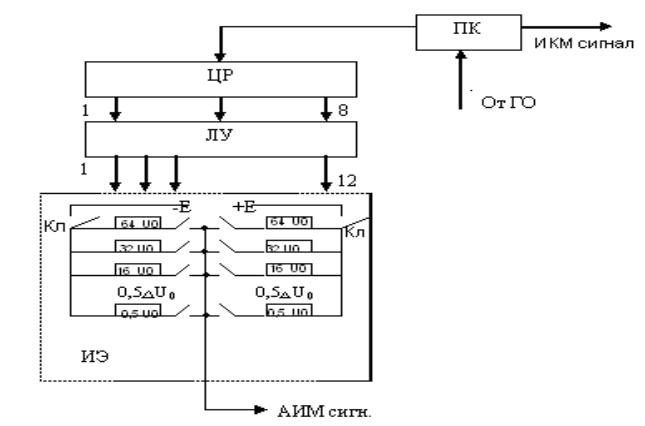
Рисунок 15.4 – Функциональная схема декодера
ИКМ
На вход
декодера поступает кодовое слово в последовательном коде, ПК из последнего
записывает это слово в ЦР, параллельном коде. ЛУ по этому коду замкнет
соответствующие ключи в ИЭ , и на выходе ИЭ появляется уровень выходного
аналогового сигнала, из которого
будет сформирован соответствующий АИМ сигнал. Но в отличие от кодера, ЛУ
имеет 12 выходов, и в ИЭ имеется дополнительный уровень 0,5DUo, чтобы компенсировать погрешность
квантования при кодировании, т.е. к уровню,
передающему в кодовом слове,
добавляется во всех случаях уровень, соответствующий
половине шага квантования в данном сегменте. Таким образом, в нашем случае на
выходе ИЭ будет сформировано 592DUo (576+16=592). Тогда ошибка квантования равна: DUкв=606-592=14DUo(<32/2DUo), то есть данная ошибка уменьшается не в 30 раз, а в 14 раз.
Неравномерное квантование можно осуществить
также линейными кодеками в сочетании с цифровой компрессией. В кодеках,
построенных по этому принципу, можно относительно просто изменять
характеристику компандирования, что позволяет использовать одни и те же кодеки
с перестраиваемым алгоритмом работы для различных сигналов, а это является
экономически невыгодно.
4 Лекция №16. Дельта
–модуляция (ДМ)
Цель
лекции: исследование видов модуляции, их принцип работы и скорость передачи
сигналов.
Для
преобразования аналоговых сигналов в цифровую форму наряду с ИКМ может быть
использована ДМ. При ДМ, как и при ИКМ аналоговый сигнал подвергается
дискретизации во времени, кодовой группой отображается знак приращения данного
отсчета по отношению к предыдущему, формируемому суммированием предшествующих
приращений с учетом их знака. О величине приращения обычно условливаются. Информация о знаке передается с помощью
двухуровневого (+1 или –1) однозарядного кода, поскольку знак приращения может
быть либо положительным, либо
отрицательным. На приемной станции по последовательности сигнал
восстанавливается.
Входной
сигнал аналогового напряжения Uc(t) ограничивается по спектру в фильтре нижних частот (ФНЧ) и
через одинаковые промежутки времени сравнивается в вычитающем устройстве с
аппроксимирующим сигналом Uап(t), формируемым из входного сигнала.
При линейной ДМ (ЛДМ) непрерывный
сигнал аппроксимируется ступенчатой функцией с постоянным шагом приращения
(квантования). Если в момент сравнения входной сигнал больше аппроксимирующего,
то есть U(t)>Uап(t), то на вход двухуровневого
решающего устройства будет подано положительное напряжение (+U), а
при U(t)<Uап(t) – соответственно
отрицательное напряжение (-U). Если на
вход решающего устройства (РУ) подан знак (+), то на
его выходе формируется кодовый импульс положительной полярности, если же знак (-), то формируется кодовый
импульс отрицательной полярности. Эти импульсы поступают на формирователь
цифрового сигнала (ФЦС), преобразующий их форму,
удобную для передачи в линии. Фильтр нижних частот передачи (ФНЧ) необходим для ограничения полосы пропускания в заданном диапазоне, так как ДМ имеет
ограниченную скорость нарастания сигнала, которая зависит от частоты и
амплитуды сигнала. В устройство вычитания (ВЫЧ) в самом
первом такте на пороге РУ подаются все сигналы Uc, так как на выходе интегратора (ИНТ) сигнал еще
отсутствует.

Рисунок 16.1 – Структурная схема ДМ
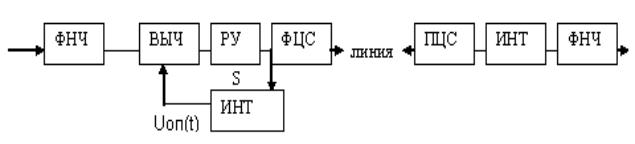
Рисунок 16.2 – Функциональная схема линейной ДМ
На выходе
короткие импульсы преобразуются в ступенчатую аппроксимирующую функцию, на
выходе будет поставлена ступенчатая аппроксимация входного сигнала. На входе РУ
будем иметь разность сигналов (Uc-Uст.ап), в зависимости от знака которой РУ будет выделять
положительный или
отрицательный импульс. На приемном конце эти импульсы попадают на интегратор (ИНТ), где восстанавливается ступенчатая аппроксимация.
При сравнении
ДМ с ИКМ можно отметить, что ИКМ работает в ограниченном диапазоне амплитуд, а
ДМ имеет ограничения по скорости нарастания входного сигнала. Для сравнения защищенности от шумов квантования ИКМ
сигнала с ДМ на f - 800Гц и
верхней частотой в спектре 3.4 на пороге перегрузки со скоростью нарастания
будет определяться следующая зависимость
Акв=Рс.ср./Рш.кв.=30lglg-17.4, [дБ]
(16.1)
Из
формулы (16.1) можно определить по заданной величине
защищенности от шумов квантования частоту дискретизации. В системах ДМ частота дискретизации равна тактовой частоте передачи
сигнала с разрядностью, равной m=8. В ИКМ
тактовая частота определяется, как fT
=8кГц*m,
значит, fT=8*8=64.
Для
обеспечения требуемой защиты от шумов квантования при
равности частоты дискретизации тактовой частоте, то разрядность будет
составлять порядка 150кГц. Если сравнить ее с ИКМ, что потребляет более
широкополосные каналы, то есть выходы
от ДМ будут более узкие. Поэтому ДМ
используется очень ограниченно (может быть использована для организации
служебной связи по каналам).
При ДМ
аналоговый сигнал подвергают сначала дискретизации по времени, но кодовая
группа отображает знак приращения в данном
отсчете по сравнению с предыдущим. Величина
отсчета (приращения) при ДМ остается постоянной, а меняется только знак
приращения одного разрядного кода, т.к. может быть либо положительным, либо отрицательным.
Поскольку приращение (D)
известно, то по последовательности импульсов
восстанавливается сигнал на приеме. Недостатками ДМ являются: малая скорость передачи (вместо 8
импульсов надо передавать один); большое
число каналов на том же самом тракте; возможна перегрузка;
трудность отслеживания сложных
сигналов; необходимость передачи информации о
начальном уровне сигнала. Формирование аппроксимирующего
сигнала осуществляется ИНТ по
совокупности кодовых импульсов, поступающих с выхода РУ. После каждого поступившего на вход ИНТ положительного импульса сигнал на выходе увеличивается
(аппроксимированный сигнал), а после отрицательного импульса уменьшается на
один шаг квантования. Таким образом, на выходе ИНТ
формируется ступенчатая функция Uап(t). А на
приемной стороне имеет место обратный процесс. После подавления ФНЧ высших гармоник восстанавливается
переданный исходный сигнал. Этот сигнал отличается от переданного наличием шума
квантования. В системах ДМ этот шум имеет две составляющие: шум, возникающий
из-за конечного значения интервалов квантования, и шум перегрузки. Шум перегрузки появляется тогда, когда приращение
входного сигнала (крутизна) превышает шаг квантования, и аппроксимирующий сигнал не «успевает следить» за
изменением сигнала. Для исключения возможности перегрузки необходимо, чтобы
приращение (∆) сигнала за время тактовых интервалов Tд не
превышало шага квантования, т.е. соблюдалось соотношение ![]() Tд
Tд ![]() DUк. Отсюда
видно, что искажение сигнала будет тем меньше, чем выше частота дискретизации fд=1/Tд. В системах с ЛДМ значение тактовой частоты намного выше, чем при ИКМ. Частоту
дискретизации при ДМ можно значительно снизить, если использовать неравномерное
квантование, при котором шаг квантования изменяется в зависимости от крутизны
изменения сигнала. Чем выше уровень сигнала, тем
шаг квантования больше, и наоборот. Этот эффект достигается в системах с адаптивной ДМ (АДМ).
DUк. Отсюда
видно, что искажение сигнала будет тем меньше, чем выше частота дискретизации fд=1/Tд. В системах с ЛДМ значение тактовой частоты намного выше, чем при ИКМ. Частоту
дискретизации при ДМ можно значительно снизить, если использовать неравномерное
квантование, при котором шаг квантования изменяется в зависимости от крутизны
изменения сигнала. Чем выше уровень сигнала, тем
шаг квантования больше, и наоборот. Этот эффект достигается в системах с адаптивной ДМ (АДМ).
Адаптивная ДМ (АДМ)
Частоту
дискретизации при ДМ можно значительно снизить, если использовать неравномерное
квантование, при котором шаг квантования изменяется в зависимости от крутизны
изменения сигнала. Чем выше уровень сигнала, тем шаг квантования больше, чем
ниже уровень, тем меньше. Этот эффект достигается в системах с АДМ, в схему кодека которых вводятся элементы управления
работой ИНТ, изменяющие величину шага
квантования формируемого ИНТ
аппроксимирующего ступенчатого сигнала.
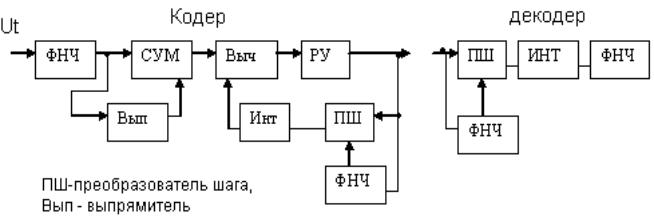
Рисунок 16.3 – Кодер и декодер
в системе с АДМ
Изменение
шага квантования (рисунок 16.3)
осуществляется преобразователем шага (ПШ),
управляемым выпрямленным напряжением входного
сигнала. Поэтому входное напряжение
выпрямляется в выпрямителе (Вып),
подается на суммирующее устройство (Сум) и, следовательно, поступает на выход
кодера, затем с помощью ФНЧ выделяется и подается на
ПШ. Чем больше напряжение входного сигнала, тем больше постоянная составляющая
поступает на ПШ и тем больше шаг квантования. Фильтр на входе кодера не
пропускает постоянную составляющую входного сигнала. Шагом квантования декодера управляется постоянная
составляющая линейного цифрового сигнала. Осуществляется это с помощью ПШ и
ФНЧ, включаемых перед ИНТ. Применение АДМ позволило снизить частоту
дискретизации до 50кГц, вместо
150….200кГц при ЛДМ. При этом параметры канала сравнимы с параметрами каналов
систем ИКМ с восьмиразрядным кодированием.
Дифференциально-импульсно-кодовая
модуляция (ДИКМ)
При ДИКМ, в
отличие от ИКМ, кодируется
не точное значение отсчета
сигнала, а разность между предыдущим значением
отсчета и текущим.
В отличие от
ДМ, где указывается знак приращения, и
кодирование производится одноразрядными
числами, здесь кодируется разность отсчетов. По сравнению с ИКМ ДИКМ обеспечивает меньшую
разрешенность кода и соответственно тактовую частоту основного сигнала.
Существуют два варианта построения схем ДИКМ: 1) с
формированием разностного сигнала в аналоговой форме и с последующим его преобразованием (АЦП); 2) получение ДИКМ сигнала после АЦП.
Линия
задержки задерживает величину сигнала на величину периода дискретизации Tд, получается, что на схеме вычитания попадает сам сигнал Uc(t), задержанный
на величину Tд. В этом случае
на выходе схемы вычитания формируется разностный сигнал (текущие и предыдущие
значения), после этого с помощью ключа
формируется АИМ сигнал, но амплитуда его будет равна разности
сигналов текущего значения отсчета и
предыдущего, которая потом кодируется в сигнал
и в цифровом виде передается в линию.
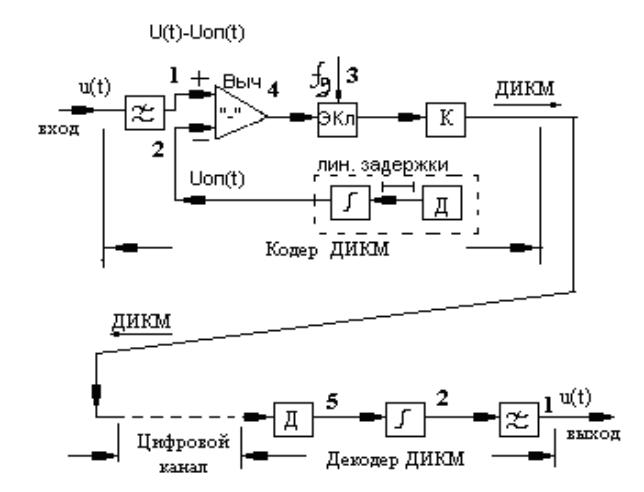
Рисунок 16.4 –
Функциональная схема ДИКМ в первом варианте
На приемном
конце декодер восстанавливает АИМ сигнал. Для восстановления аналогового
сигнала разностный сигнал U(t)-Uоп(t) подается
в ИНТ, на выходе которого будет получен
ступенчатый сигнал, величина
которого пропорциональна амплитуде импульса, подаваемого
на ИНТ, т.е. на выходе ИНТ
будет ступенчатый
аппроксимирующий сигнал с разными
шагами (величина ступенек в отличие от ДМ разная), а ФНЧ
сглаживает эти ступеньки сигнала. В этом
случае исходный сигнал, как и в системах ИКМ,
подается на АЦП, на выходе которого имеется ИКМ
сигнал.
ДИКМ
применяется для повышения пропускной способности цифровых ИКМ трактов, так как уменьшается разрядность кода, можно
увеличить число кодовых комбинаций, переданных в единицу времени. По сравнению с ДМ ДИКМ имеет преимущество при
передаче сигналов, у которых возможны резкие скачки мгновенных значений.
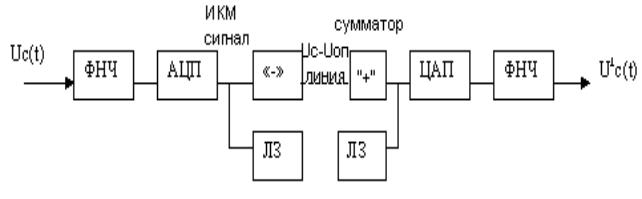
Рисунок 16.5 – Схема ДИКМ
во втором варианте
Например, при
передаче TV сигналов и видеотелефонных сигналов, где резкие изменения
соответствуют границам между темными и яркими деталями на изображениях. При
ДИКМ fд
выбирается такой же, как при ИКМ. Можно выделить следующие недостатки ДИКМ: маленькая скорость
передачи цифрового потока; необходимо
задавать начальный уровень сигнала.
Синхронизация в цифровых СП с ИКМ
В ЦСП с ВРК
правильное восстановление исходных сигналов на приеме возможно только при
синхронной и синфазной работе ГО. Принципы формирования цифрового группового сигнала для
нормальной работы ЦСП должны обеспечить
следующие виды синхронизации: тактовая, цикловая и сверхцикловая. Нарушение хотя бы одного из видов синхронизации приводит к
потере связи по всем каналам ЦСП. Тактовая синхронизация обеспечивает
равенство скоростей обработки сигналов на передающей и приемной станциях. Для
соблюдения этого равенства ГО оконечной
приемной станции управляет fT,
выделяемая из принимаемого ИКМ сигнала. fT – частота следования импульсов группового цифрового сигнала
в линии, то есть fT =m*N*fд, m=8. Например, ИКМ–30: где тактовая частота fT=8*32*8*103=2048кГц, частота следования разрядных импульсов fp= fT/m=2048/8=256кГц, частота
канальных импульсов (частота дискретизации) fT=2048/(8*32)=8кГц, частота цикловой синхронизации равна 4кГц, частота сверхцикловой синхронизации (СЦС) fд/16=8*103/16=500Гц. ВЫП преобразует двухполярный линейный
сигнал в однополярный. Узкополосный фильтр (УПФ) выделяет гармоническое колебание частоты fT.

Рисунок 16.6 – Упрощенная структурная схема устройства ВТЧ
К
избирательности фильтра УПФ должны быть предъявлены жесткие требования, иначе
часть непрерывной составляющей энергетического спектра однополярного сигнала
ИКМ пройдет через фильтр и вызовет «дрожание» тактовой частоты, т.е. временных интервалов между импульсами. Этим гармоническим
колебанием управляет формирующее устройство (ФУ), и
импульс формируется при переходе
синусоидального колебания из «-» в «+» через 0. С выхода ФУ тактовая частота подается на ГО приема, управляя его работой по
тактам. В каждом тактовом импульсе может быть передан один двоичный импульс (символ), равный 1 или 0.
5 Лекция №17. Цикловая синхронизация
Цель
лекции: рассмотрение разновидностей синхронизации, специфика работы в составе
цифровых СП.
Синхронизация
по циклам обеспечивает правильное разделение каналов, т.е. поступление
декодированных АИМ сигналов определенных каналов в приемные устройства этих
каналов. При включении
аппаратуры в работу цикловой синхронизм устанавливается через определенный
промежуток времени, который называется временем вхождения в синхронизм. При
нарушении синхронизма система переходит в режим поиска, который характеризуется
временем поиска синхронизма. При отсутствии циклового синхронизма (ЦС) работа системы с ИКМ невозможна, необходимо, чтобы время
вхождения в синхронизм и время поиска были как можно малыми. В
современных системах с ИКМ это время не превышает нескольких миллисекунд, так как, если
увеличится это время, все приборы
в АТС разъединятся (прервется связь между абонентами). В качестве синхросигнала можно использовать один двоичный
символ или группу символов определенной структуры.
В настоящее
время используется многосимвольная синхрогруппа, обеспечивающая быстрое ее
нахождение при потере синхронизма.
Приемник циклового синхронизма (ПЦС)
Приемник
циклового синхронизма (ПЦС) (рисунок 17.1) предназначен
для выделения циклового синхронизма из принимаемого сигнала и вхождения в
синхронизм. Параметр включения в синхронизм является одним из важных параметров
ЦСП, и он не должен превышать
нескольких миллисекунд, в противном случае могут сброситься приборы АТС.
Регистр
является семиразрядным сдвиговым прибором. На
него подается ИКМ сигнал, а в качестве синхронизации используется выделяемая из
этого же сигнала тактовая частота fT=2048 кГц , опознаватель (ОП),
работающий по принципу схемы «и», опознает входной сигнал.
При
совпадении сигнала с синхрогруппой
0011011 прибор выдает импульс, равный fоп=4 кГц. Режим синхронизации обеспечивается тогда, когда
имеет место совпадение импульса с выхода ОП с
импульсом со счетчика делителя 1:512. Оба эти сигнала
поступают в накопитель по выходу, представляющий собой четырехразрядный сдвиговый регистр, на выходе которого включена
схема «или». Если хотя бы
в одном из выходов регистра приступает единица (1), то система разрешает
декодирующее устройство (схема «или»).
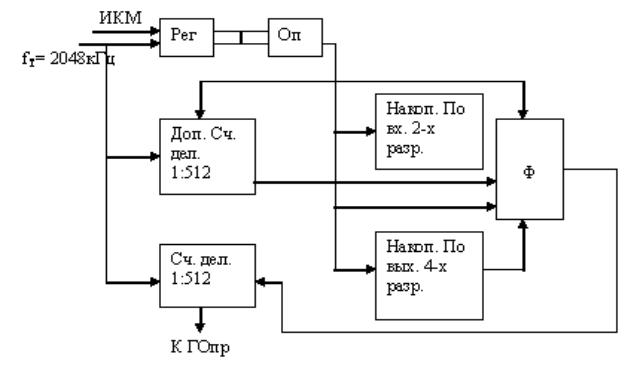
Рисунок
17.1 – Приемник циклового синхронизма
А если во всех четырех значениях был 0, т.е. совпадения
не было 4 раза, то на
выходе схемы «или» появляется
сигнал логического «0», и декодирование прекращается. Накопитель по выходу из синхронизации сделан четырехразрядным для того, чтобы при кратковременных сбоях
синхронизации декодирование не прекращалось. Накопитель по входу в синхронизацию представляет собой
двухразрядный сдвиговый регистр на выходе, и его схема
«и». На выходе этой схемы «1» получается только тогда, когда
было совпадение импульсов ОП с импульсами по счетчику деления 1:512 два
раза. Если совпадение отсутствует хотя бы 1 раз, т.е. на выходе накопителя
имеется сигнал «0», то по этому сигналу дополнительный
счетчик деления останавливается, и на выход счетчика поступает поделенная тактовая частота fT (вместо
4кГц). Затем находят совпадение импульсов с выхода ОП с каким-либо импульсом неподеленной
тактовой частоты fT, при совпадении дополнительный счетчик делителя начинает
работать и проверяться: совпадают ли
импульсы с выхода ОП с импульсами со счетчика делителя через 256 тактов в тракте. Если будет «1», что соответствует состоянию аварии
синхронизации передаваемой станции, то накопитель по входу обнуляется, и
процесс установления синхронизации начинается снова. Если через 512 тактов
произошло повторное совпадение импульса с выхода ОП с сигналом поделенной тактовой частоты fT на
512, то есть в регистр накопителя по входу будут записаны две «1» подряд, это значит, что дополнительный счетчик деления
1:512 работает в режиме
синхронизации. В этом случае формирователь сигналов устанавливает и выдает
сигнал на управление основным счетчиком-
делителем, по которому последний устанавливается синхронно дополнительному
счетчику-делителю.
Принцип
установления СЦС производится аналогично, но только после установления
синхронизации по фреймам.
Сверхцикловая синхронизация (СЦС) в ЦСП
СЦС
предназначена для восстановления и удержания состояния циклового синхронизма
между передающей и приемной частями ЦСП, также она обеспечивает
правильное распределение сигнала управления и
взаимодействия (СУВ) на приеме по
соответствующим телефонным каналам. СЦС
включает в себя передатчик и приемник синхросигналов.
Передатчик
формирует в передающей части кодовую группу определенной структуры,
расположенную в начале цикла передачи. В приемнике осуществляется опознавание
кодовых групп, структура которых совпадает со структурой синхросигнала, и
принимается решение о
принадлежности опознанных кодовых групп передаваемому синхросигналу. При
обнаружении циклового синхросигнала (ЦС)
производится фазирование ГО приема. В соответствии с этим приемник ЦС включает в себя ОП,
накопители по выходу из синхронизма и по входу в синхронизм, а также схему
управления ГО с накопителями. Необходимо, чтобы восстановление состояния
синхронизма происходило как можно быстрее, а затем удерживалось как можно
дольше. В системах
синхронизации выбирается минимальная емкость накопительных устройств,
обеспечивающая требуемую помехоустойчивость.
По принципу
действия приемники циклового синхронизма могут быть разделены на неадаптивные и
адаптивные. В
неадаптивных приемниках емкости накопительных устройств соответствуют предполагаемой
заранее вероятности искажения символов в линейном тракте и не изменяются в
процессе работы. В адаптивных
приемниках емкости накопительных устройств изменяются в соответствии с
изменением реальных значений этой вероятности. Структурная схема неадаптивного приемника синхросигнала
представлена на рисунке 17.2.
Групповой
цифровой поток поступает на вход опознавателя синхронизма, состоящего из регистра сдвига (РС) и дешифратора (ДШ). Каждая комбинация символов, аналогичная
синхронизирующей, вызывает формирование сигнала на входе ДШ. Если система передачи находится в состоянии синхронизма,
то сигнал с выхода опознавателя совпадает по времени с сигналом с выхода генераторного оборудования (ГО). На выходе логического элемента «НЕТ» соединенного
с накопителем по выходу синхронизма, сигнал отсутствует, а на выходе
логического элемента И1,
соединенного с накопителем по входу в синхронизм, формируется сигнал,
соответствующий моменту опознавания синхрокомбинации. В результате накопитель по
входу в синхронизм (рассчитанный на 2-3 следующих подряд импульса) окажется заполненным, а накопитель по выходу из синхронизма
(рассчитанный на 4-6 импульсов) – разряженным до
0-го состояния.
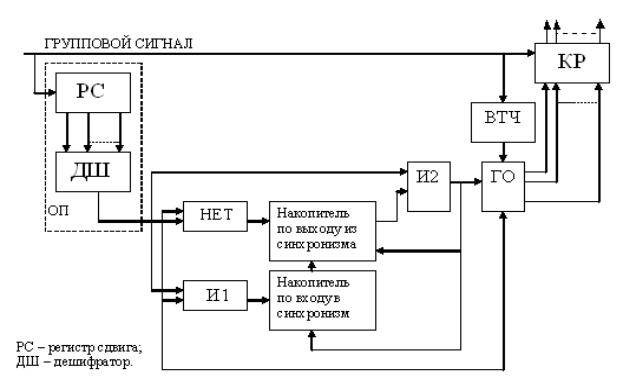
Рисунок 17.2 – Структурная
схема неадаптивного приемника синхросигнала
Ложные
синхрогруппы, формируемые в групповом сигнале вследствие случайного сочетания
единиц и нулей, не совпадают
по времени с сигналом на выходе ГО. При
кратковременных искажениях синхросигнала, возникающих либо при сбоях
синхронизации в системах более высокого порядка, либо под воздействием помех,
сигнал с выхода ГО проходит через логический элемент «НЕТ», на вход
накопителя по выходу из синхронизма. Если накопитель не успевает заполнится, то
сбоя информации не происходит, и по первому
же сигналу с выхода накопителя по входу в синхронизм осуществляется сброс в
нулевое состояние накопителя по выходу из синхронизма. При отсутствии синхросигнала в промежуток времени r1
следующих подряд циклах логический элемент И2 открывается и первый же импульс, сформировавшийся на выходе из
ложной синхрогруппы, переводит ГО и накопитель по входу в синхронизм в нулевое
состояние, а накопитель по выходу из синхронизма в состояние, соответствующее еще одному r1-1
импульсу на его входе. При обнаружении истинного синхронизма накопитель по входу
в синхронизм заполняется и сбрасывает накопитель по выходу из синхронизма в
нулевое состояние, в результате чего обеспечивается
достаточная инерционность системы цикловой синхронизации в режиме удержания
синхронизма. Как видно из рисунка
17.3, в неадаптивном приемнике
синхросигнала время восстановления tв складывается
из времени накопления по выходу из синхронизма tн.вых , времени
накопления по входу в синхронизм tн.вх и времени
поиска синхронизма сигнала tп.
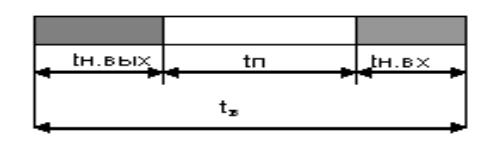
Рисунок 17.3 – Время
восстановления в неадаптивном приемнике синхросигнала
Можно выделить следующие недостатки
неадаптивного приемника: значение емкостей накопителей по выходу из
синхронизма и по входу в синхронизм фиксированы; практически никогда не могут
быть достигнуты оптимальные параметры времени восстановления синхронизма и помехоустойчивости. Искажения передачи символов в кабельной линии –
вероятность очень низкая, равная 10-6
и ниже, а по РРЛ она
равна 10-3.
Указанные
недостатки устраняются в приемнике синхросигнала, в
адаптированном к повышению вероятности искажения символов тракте.
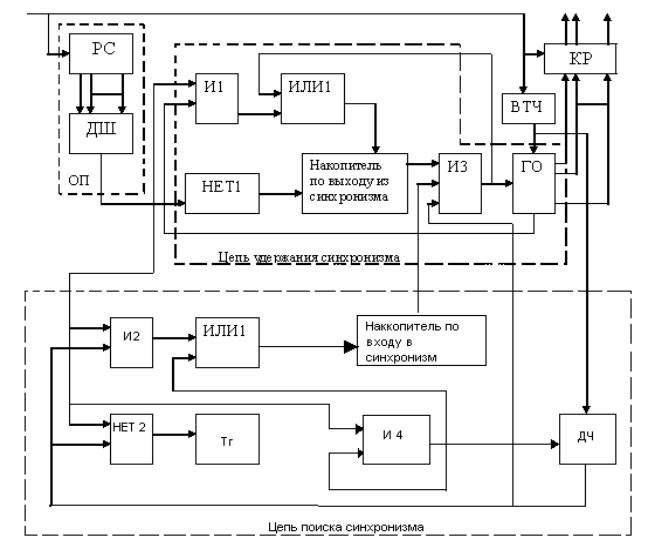
Рисунок
17.4 – Структурная схема адаптивного приемника
синхросигнала
В приемнике (рисунок 17.4) процессы накопления по выходу из синхронизма и
поиска синхросигнала осуществляются параллельно в целях удержания
синхронизма. В этом
случае по первому же импульсу на выходе накопителя по выходу из синхронизма
начинается процесс поиска синхросигнала, а ГО продолжает сохранять предыдущее
состояние до тех пор, пока не будет
зафиксировано новое состояние синхронизма. В состоянии синхронизма накопитель
по выходу из него разряжен, и сигнал сброса на входе ГО отсутствует. Благодаря совпадению временных положений
импульсных последовательностей с выходов опознавателя и делителя частоты
(ДЧ), накопитель по входу в синхронизм
оказывается заполненным, а триггер (Тг) удерживает логический элемент И4 в закрытом состоянии,
при котором ложные синхрогруппы,
формирующиеся в групповом сигнале, не вызывают сброса ДЧ. При сбое синхронизма накопитель по выходу из него заполняется и вырабатывает решающий сигнал на входе логического элемента И3, который остается закрытым до тех пор, пока на его вход не будет
подан также разрешающий сигнал с выхода
накопителя по входу в синхронизм. И4 открывается сигналом с выхода триггера, и первый же ложный синхросигнал,
сформировавшийся в
групповом потоке, установит ДЧ и Тг в нулевом состоянии. И4 в
результате закроется до тех пор, пока на анализируемой позиции не сформируется
комбинация символов, отличающихся от синхронизирующей. При обнаружении истинного синхросигнала накопитель по
входу в синхронизм заполнится и будет вырабатываться разрешающий сигнал на входе логического элемента И3, если к этому моменту сигнал с выхода
ДЧ установит ГО в нулевое состояние.
Адаптивный
приемник синхросигнала используется практически во всех отечественных ЦСП.
6 Лекция №18. Особенности цикловой синхронизации ЦСП высших порядков
Цель
лекции: изучение особенности цикловой синхронизации ЦСП при различных видах
модуляции.
Особенностью
ЦСП высших порядков является влияние сбоев синхронизации в этих системах на все
компонентные системы более низкого
порядка.
Сбой
синхронизации ЦСП высших порядков вызывает отсутствие синхронизма во всех
компонентных системах при использовании неадаптивных
приемников синхросигнала. Если сбой синхронизации в системе n-го порядка длится дольше, чем время
накопления по выходу из синхронизма в системе (п-1) порядка, то начнется
процесс поиска синхросигнала в системе (n-1) порядка, т.е. происходит
«размножение» сбоев цикловой синхронизации. Если сбои синхронизации в системе n-го порядка длятся меньше, чем время накопления по выходу из синхронизма
в системе (п-1) порядка, то размножение в процессе
поиска синхронизации не происходит. Для
защиты от размножения необходимо, чтобы выполнилось условие, где P(tв(n) > tн.вых(n-1) )=0. Вероятность того, что время восстановления
синхронизма в системе передачи n-го
порядка tв(n) превосходит
время накопления по выходу из синхронизма в СП (п-1) порядка равна tн.вых(n-1). Инерционность системы цикловой синхронизации должна
быть такой, что за время восстановления
синхронизма в ЦСП более высокого порядка в системе более низкого порядка не
должен начаться процесс поиска синхронизма.
Таким
образом, при проектировании системы цикловой синхронизации необходимо
определить минимальную длительность синхросигнала и минимальные коэффициенты
восстановления синхронизма, в частности, искажения передаваемых символов из-за сбоев
синхронизации.
При использовании
адаптивных приемников синхросигнала размножения
сбоя синхронизации не происходит, когда выполняется одно из условий: P(tв(n) > tн.вых(n-1) )=0 или Pл.с.(tв(n) - tн.вых(n-1) )=0, а вероятность формирования ложного
синхросигнала за отрезок
времени уменьшается, если время восстановления будет больше времени накопления выхода tв(n) > tн.вых(n-1). В этом случае, т.е. во время использования адаптивных
приемников синхросигнала, может быть
обеспечено минимально возможное время отсутствия синхронизма при сколько угодно большом времени восстановления синхронизма в
системах более высокого порядка путем минимизации вероятности формирования
ложных синхросигналов, что довольно просто достигается увеличением емкости
накопителя по входу в синхронизм.
Выше были рассмотрены синхронные режимы работы при использовании
неадаптивных и адаптивных приемников синхросигнала. Теперь можно остановиться
на асинхронном режиме работы при использовании адаптивных приемников
синхросигнала. В этом случае
размножения сбоев цикловой синхронизации не происходит при выполнении следующих
условий
![]() P(tв(n) > tн.вых(n-1) )=0 или
Pл.с.(tв(n) - tн.вых(n-1) )=0
если tв(n) > tн.вых(n-1)
P(tв(n) > tн.вых(n-1) )=0 или
Pл.с.(tв(n) - tн.вых(n-1) )=0
если tв(n) > tн.вых(n-1)
Pл.с.с.(tв(n) )=0 Pл.с.с.(tв(n) )= 0
(18.1)
Вероятность
ложного срабатывания синхросигнала. Системы с односторонним согласованием
скоростей, в которых Pл.с.с.(tв) практически
равно единице, вносят максимально возможное
приращение времени отсутствия синхронизма. Отсюда следует, что в таких системах
адаптивный приемник синхросигнала практически не обеспечивает защиту от
размножения сбоев цикловой синхронизации
независимо от параметров этого приемника. В
системах с двухсторонним
согласованием скоростей значение Pл.с.с.(tв) может быть
уменьшено до значения, весьма близкого к
нулю. В этом случае адаптивный приемник синхросигнала обеспечивает эффективную
защиту от размножения сбоев синхронизации. Это достигается блокировкой приемников команд согласования
скоростей на время сбоя синхронизации и анализом структуры команд согласования
скоростей.
Достоинства
ЦСП
С помощью ЦСП
в линию передается сигнал с малым числом уровней:
-двоичный;
-квазитроичный.
Понятно, что
различить такой сигнал в условиях больших помех легче, чем аналоговый, в
котором информация передается большим количеством амплитудных градаций, что и определяет большую
помехоустойчивость ЦСП по сравнению с аналоговыми системами передачи (АСП). Большая помехоустойчивость ЦСП используется, например, при построении цифровых СП для сельской телефонной станции (СТС), в
которых двухсторонняя связь ограничивается по четырехпроводной однополосной однокабельной системе с
использованием дешевого одночетверочного кабеля КСПП. АСП не могут работать в таком режиме, т.к. малое
переходное затухание на ближнем конце
не обеспечивает требуемой защиты между прямыми и
обратными направлениями передачи. В линейных
трактах ЦСП применяют регенератор, позволяющий уменьшать эффект накопления
помех на магистрали. Хотя с ростом числа регенераторов увеличивается
вероятность ошибки, однако существующее увеличение ошибки эквивалентно
незначительному увеличению шума. Абсолютное
значение вероятности ошибки,
допустимое в линии, мало (меньше 10-6), и поэтому шумы линейного
тракта вносят малый вклад в суммарный шум канала, отсюда становится ясным, почему характеристики ЦСП мало
зависят от длины магистрали.
Высокая
надежность, технологичность, малая
масса и габаритные размеры, а также удобство эксплуатации являются важнейшими достоинствами ЦСП, которые определяют
широкое использование цифровых
элементов. При ЦСП ширина ИКМ сигнала равна Δfикм=8*m*N, а при АСП – Δfикм=4N. Если двухсторонняя связь организуется
по однополосной системе, тогда ширина ИКМ сигнала равна Δfикм/ Δfчрк≈2m,
где m=8. ЦСП занимает большую полосу
частот, чем система с ЧРК при том же числе каналов тональной частоты (ТЧ). В
связи с этим регенераторы ЦСП надо размещать чаще, чем усилители АСП, и поэтому стоимость линейных трактов ЦСП выше, чем
аналоговых.
С
экономической стороны в ЦСП в основном
применяется ВРК, а в оконечной станции СП с ЧРК на 70% определяется в основном
канальными ПФ, формирующими спектры канальных сигналов. Разделение канальных
сигналов в ЦСП осуществляется ключами,
в них нет сложных фильтрирующих схем, и поэтому оконечная
станция (ОС) ЦСП дешевле
аналоговых.
Линейный тракт ЦСП
Линейный
тракт ЦСП содержит оконечное оборудование линейного тракта (ООЛТ), направляющую среду, регенерационные пункты, необслуживаемые НРП, обслуживаемые усилительные пункты (ОУП). Большая часть регенерационных пунктов является
необслуживаемыми, которая дистанционно питается от ОП и ОРП (ОУП). ООЛТ
служит для согласования характеристик передаваемого группового сигнала
(цифрового) с параметрами и характеристиками направляющей среды.
Построение многоканальной аппаратуры с непосредственным ИКМ
Схема оконечной станции (ОС)
содержит индивидуальное оборудование (ИО) и групповое оборудование (ГО). ИО служит для дискретизации передаваемых аналоговых
сигналов и выделения спектра этих
сигналов из спектра их отсчетных
значений на приемном конце. Основное назначение ГО состоит в кодировании
группового АИМ сигнала для передачи сигналов в цифровом виде и декодировании
группового цифрового потока в тракте приема. Импульсы сигналов АИМ-1 всех каналов объединяются в групповой АИМ сигнал и
подаются к формирователю импульсов АИМ-2
группового оборудования, где импульсы АИМ-1 расширяются, и обеспечивается
плоская их вершина. Затем групповой сигнал АИМ-2 квантуется и кодируется в
кодере. Таким образом, за период
дискретизации происходит по одному разу отсчет дискретных значений речевых
сигналов во всех каналах, их квантование и кодирование. С выхода кодера цифровой сигнал поступает на устройство временного уплотнения
(УВУ), где происходит объединение
этого сигнала с импульсными сигналами управления и взаимодействия (СУВ) и приемника синхросигнала (Перс/с). После объединения групповой сигнал поступает на кодер
линейного тракта (КЛТ), где в результате перекодирования формируется линейный
цифровой сигнал, который через линейный трансформатор поступает в линейный
тракт.
Прием осуществляется через
ТрЛ (рисунок 18.1), сигнал поступает на
станционный регистр (СР), декодер линейного тракта (ДЛТ), где он
преобразуется в импульс двоичного кода. Из цифрового сигнала выделяется
колебание тактовой частоты fT,
управляющее работой ГО. С выхода ДЛТ цифровой сигнал подается к декодеру, а от него и к приемнику синхросигналов (Прс/с).
Приемник синхросигналов (Прс/с) выдает синхроимпульсы, служащие для синхронизации ГО
приема. Здесь же выделяются сигналы СУВ, которые подаются на согласующее
устройство СУ, где импульсные последовательности СУВ преобразуются в импульсы
постоянного тока, которые управляют
работой устройств АТС. Ток ДП передается через искусственные цепи, через
«средние точки» линейных трансформаторов.
Амплитудно-импульные модуляторы (АИМ)
АИМ-1 осуществляется с помощью быстродействующих электронных
ключей, которые периодически работают с частотой дискретизации fд. Они подключают
входной сигнал к нагрузке на время длительности импульсов τ. Электронный ключ может включаться
последовательно с источником сигнала или параллельно с ним. В первом случае (рисунок
18.2,а) при наличии управляющего импульса он должен замыкаться,
во втором случае (рисунок 18.2,б) –
размыкаться. При
отсутствии импульсов в цепи управления транзисторы находятся в режиме отсечки и
цепь прохождения сигнала разомкнута. Под действием управляющих импульсов
транзисторы будут разомкнуты и будут переходить в
режим насыщения. Сопротивление ключа резко уменьшается, и,
таким образом, формируется отсчет входного сигнала.
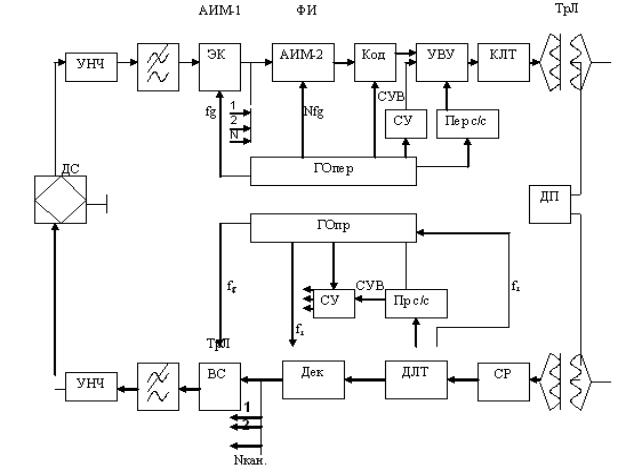
Рисунок 18.1 – Построение многоканальной
аппаратуры с непосредственным ИКМ

Рисунок
18.2 а) схема ключа, включенного последовательно в цепь
сигнала; б)
электромеханическая модель этого ключа.
Основное требование, предъявляемое к ключу, состоит в том, чтобы
при отсутствии входного сигнала, управляющая
работой ключа импульсная последовательность не попадала на выход схемы
модулятора. Поступление остатка управляющего напряжения на вход квантования
приведет к увеличению шумов в канале. С целью подавления этого остатка
предусмотрена балансировка схемы с помощью потенциометра сопротивлением R. Дискретизация входного сигнала во
времени приводит к заметному его затуханию, поскольку при этом энергия сигнала
передается лишь на протяжении времени его отсчетов. Для уменьшения затухания
модулятора АИМ-1 применяют резонансную передачу отсчетных значений сигнала к
формирователю импульсов АИМ-2.
На рисунке 18.3, а показан ФНЧ, включенный на вход модулятора, который имеет Т-образное окончание, и на входе (рисунок 18.3,б)
формирователя АИМ-2 предусмотрен накопительный конденсатор емкостью С2. К модулятору АИМ-1 подаются импульсы,
следующие с частотой дискретизации fд, а к формирователю импульсов группового оборудования АИМ-2 подаются
сигналы с частотой дискретизации N*fд, где N-
число каналов. C1 и С2 вместе с катушкой индуктивности L образуют последовательный
резонансный контур. На протяжении интервала времени между соседними импульсами, показанными на
эквивалентной схеме (рисунок 18.3,б), ключ Kл1 закрыт, и в конденсаторе С1
накапливается энергия передаваемого сигнала. Напряжение на этом конденсаторе
будет пропорционально мгновенному напряжению сигнала.
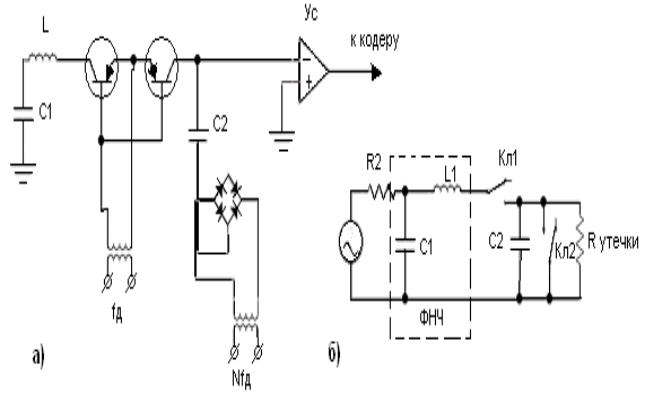
Рисунок 18.3 а) ФНЧ на входе модулятора;
б) формирователь АИМ-2.
При
поступлении управляющего импульса ключ Кл1
открывается и накопленная на конденсаторе С1 энергия передается другому конденсатору С2. Чтобы накопленная энергия была максимальной и вновь не
отдавалась конденсатору С1, половина длительности периода колебательного
процесса в контуре То/2 должна быть равна времени замыкания Кл1,
равному длительности управляющего канального импульса τ. Данное условие выполняется, если
τ=То/2=1/2*fo=π*(LC)1/2, (18.2)
С=С1С2/С1+С2 , (18.3)
где fo–частота колебательного
процесса в контуре емкости. Нестабильность
длительности импульсов и резонансной частоты контура приводит к изменению
напряжения на конденсаторе и, следовательно, к нестабильности остаточного
затухания канала. Импульсы, управляющие работой Кл2, смещены по отношению к
импульсам, управляющим работой Кл1, на
время, равное длительности кодовых групп τк. Поэтому после
размыкания Кл1, когда Кл2
еще разомкнут, С2 разряжается лишь через сопротивление утечки усилителя с
высокоомным входом, и поэтому
напряжение на С2 остается практически постоянным на время кодирования. С
поступлением управляющих импульсов на Кл2 последний замыкается, шунтируя вход
усилителя, и конденсатор С2
быстро разряжается.
Ограничение
спектра и переходные помехи в групповом тракте с АИМ
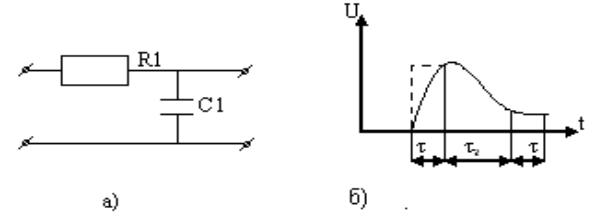
Рисунок 18.4 а) ФНЧ; б) ограничение
спектра сверху
Разделительные
и паразитные емкости в групповом тракте с АИМ приводят к ограничению спектра
группового сигнала сверху и снизу. В результате фронты канальных импульсов
затягиваются и появляются выбросы обратной полярности.
При этом появляются искажения, и импульсы
данного канала перекрывают временные интервалы импульсов соседних каналов, что
приводит к внятным переходным влияниям.
Оценивая влияние ограничения спектра сверху, обусловленного паразитными
емкостями, примем, что групповой тракт с АИМ в области высоких частот можно
представить простейшими фильтрами нижних частот (ФНЧ). Верхняя
граничная частота ФНЧ на уровне затухания равна 3дБ.
Fв=1/2*π*R1*C1 , (18.4)
В результате
ограничения спектра сверху канальный импульс примет форму, показанную на рисунке 18.4,б. Искажение и переходные помехи, вызванные ограничением
спектра сверху, называют искажениями и переходными помехами первого рода. Если
защитный интервал между импульсами
соседних каналов τз=τ,
то напряжение переходной помехи в начале импульса соседнего канала Uп=Aexp(-τ/R1*C1), а защищенность от переходной помехи будет равна:
ап ≈ 8,7*ln(A/Uп)=8,7τ/R1*C1=8,7*2π*fвτ ,
(18.5)
В зависимости
от требуемой величины ап верхняя граничная частота группового тракта
с АИМ должна удовлетворять условию Fв≥
ап/54,7τ. Если
при отсутствии внятных переходов ап≥65дБ, то Fв≥1.83*10-2
*ап*2*N*fд. ФНЧ
с емкостью означает ограничение спектра снизу. Указанные ограничения спектра приводят к
спаду вершины импульса и появлению выброса отрицательной полярности. Искажения и переходные помехи, вызванные ограничением
спектра снизу, называют
искажениями и переходными помехами второго рода, тогда защищенность сигнала второго рода выглядит следующим образом:
ап2=20lg(Fн/fд*τ*fн)=20lg(2*N*Fн/fн),
(18.6)
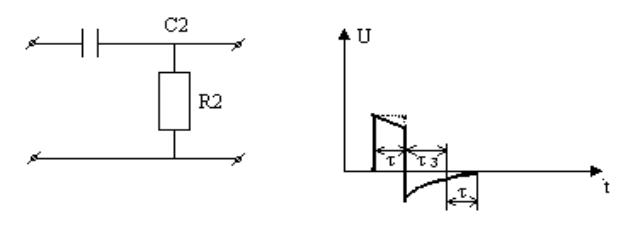
Рисунок 18.5 – Ограничение спектра снизу
Для того, чтобы осуществлялась
норма по защищенности от внятных переходов, необходимо выполнение условия fн≤5Гц, где fн–нижняя частота.
7 Лекция №19. Кодеры
с линейной шкалой квантования
Цель лекции: рассмотрение принципа
работы кодера и декодера с линейной шкалой квантования.
Кодеры ЦСП с
ИКМ служат для преобразования отсчетов аналоговых сигналов к цифровому виду. В кодерах совмещается
операция квантования и перевод квантованных отсчетных
значений сигнала в кодовые группы двоичного кода. В результате кодирования при m–разрядном двоичном коде каждому из
М=2m возможных значений уровней отсчета будет соответствовать
определенная кодовая комбинация m – разрядных
двоичных символов.
В ЦСП с ИКМ
применяются кодеры с неравномерной шкалой квантования, при их построении
используются кодеры с равномерной шкалой квантования. Кодеры бывают трех видов:
кодеры счета, кодеры взвешивания и матричные кодеры (с кодовым полем).

Рисунок 19.1 – Структурная
схема кодера счета
На вход
кодера подаются импульсы сигнала АИМ-2, которые затем преобразуются в импульсы широтно-импульсной модуляции ШИМ, длительность которых
пропорциональна высоте отсчетных импульсов. Модулированные по длительности
импульсы подаются на один из входов логической ячейки «И», а на другой вход подается последовательность коротких
импульсов. В результате на выходе
ячейки «И»
получим пачки импульсов, где количество
импульсов в каждой пачке будет пропорционально длительности импульсов ШИМ и,
следовательно, будет пропорционально
высоте отсчетных импульсов сигнала
АИМ-2. В дальнейшем ячейки
двоичного счетчика производят счет импульсов, содержащихся в каждой пачке, и
после считывания состояния ячеек
счетчика формируется двоичная кодовая группа параллельного двоичного m–разрядного кода, выражающая
кодируемый отсчет. Для перевода параллельного кода в последовательный используются линии задержки,
сдвигающие кодовые импульсы, начиная со второго импульса, на Тк, 2Тк…..(m-1)Tк. По окончании процесса счета перед
поступлением на счетчик следующей пачки импульсов производится сброс ячеек счетчика, и он подготавливается для
дальнейшего счета. Максимальное
число импульсов в пачке будет определяться числом разрядов кода и будет равно 2m. Число пачек импульсов, поступающих
на счетчик в единицу времени в N –
канальной системе с ИКМ и ВРК, равно Nfд, где N– число каналов, fд–частота дискретизации.
Поэтому при 8-разрядном
кодировании потребуется скорость работы счетчика, равная Nfд*28=N*8*103*28=2.05*106N. В ИКМ и ВРК скорость работы
счетчика должна быть равна примерно 60*106 имп/с.
Таким
образом, по своему принципу действия кодеры счета требуют высокого
быстродействия, что является их существенным недостатком. А в качестве достоинств можно выделить:
надежность и повышенная точность работы. Наибольшее распространение в системах цифровой связи
с ИКМ получили кодеры взвешивания,
также их называют кодерами поразрядного сравнения. Построение кодера матричного
типа основано на использовании кодового поля, в котором отображены все кодовые
группы при данном разряде кода. Кодовое поле может быть выполнено либо в виде
набора решающих устройств, либо в виде кодовой маски в специализированной
электронно-лучевой кодирующей трубке. При поступлении на вход подобного кодера
от счетного импульса сигнала данной амплитуды определенные элементы кодового
поля (матрицы) приводятся в состояние возбуждения, и на выходе кодера формируется кодовая группа, которая
соответствует определенному квантованному значению отсчета. Матричные кодеры отличаются большим быстродействием, но матричные кодеры с решающими устройствами отличаются
низкой точностью кодирования, достаточно ограничиться числом разрядов кода не более
пяти. Применение же
специализированных кодирующих электронно-лучевых трубок для повышения точности
преобразования ограничивает применение кодеров матричного типа, поскольку такие
трубки требуют высоковольтных источников питания, их габариты сравнительно
велики, и они обладают недостаточной надежностью. Эти трубки применяются для
кодирования телевизионных сигналов.
Декодеры с
линейной шкалой квантования
Декодирование
цифрового сигнала состоит в преобразовании кодовых групп в соответствующие
квантованные отсчетные значения аналоговых сигналов. При этом отсчетное значение сигнала формируется путем суммирования
весовых значений символов кодовой группы. Декодеры
(рисунок 19.2) бывают трех видов: декодеры счета,
взвешивания и матричные декодеры. Декодеры, как
и кодеры счетного типа, требуют высокой
скорости работы счетчика (N*fд*2m имп/с), и поэтому они не нашли широкого применения в системах
связи с ИКМ. Наибольшее применение в этих системах связи нашли декодеры
взвешивания. Практическое применение находят декодеры параллельного кода, когда
предварительно производится преобразование цифрового потока последовательного
кода в цифровой поток параллельного кода. Декодер
взвешивания состоит из формирователя и сумматора эталонных напряжений, каждый из которых должен
соответствовать символу кодовой группы данного разряда. При этом для
натурального двоичного кода величина отсчета будет равна
![]() . (19.1)
. (19.1)
Все разрядные
эталонные напряжения могут быть
получены от источников напряжения или тока с помощью матрицы сопротивления на
резисторах двух номиналов R и 2R. Последовательный код преобразуется
в параллельный с помощью регистра сдвига (РС) импульсов кодовой группы,
импульс считывания обеспечивает прохождение импульсов через ячейки Uk к триггерам T
разрядов. В результате на выходе триггеров устанавливаются в параллельном виде символы всех разрядов (0 или 1) кодовой группы. Затем
импульс сброса возвращает триггеры в входное положение, фиксируя длительность
импульса на выходе декодера.
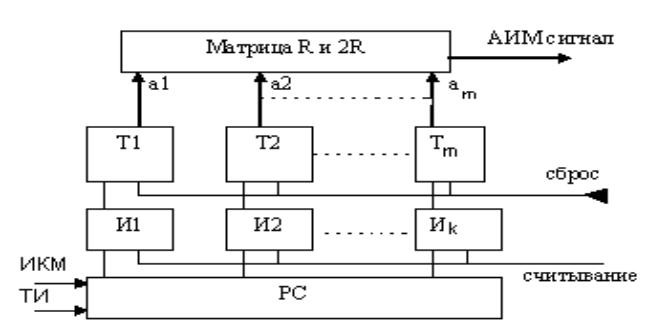
Рисунок 19.2 – Структурная схема декодера
Генераторное
оборудование (ГО)
ГО служит для формирования импульсных последовательностей,
используемых для управления работой функциональных узлов аппаратуры,
производящих обработку сигналов, а также для синхронизации оконечного
оборудования передающей и приемной станции. ГО выполняется отдельно для
передающей и приемной частей оконечной станции.
В ЗГ (рисунок 19.3) формируется последовательность импульсов тактовой частоты fT при
относительной стабильности частоты 10-5….10-6. ДР предназначен для формирования и распределения разрядных
импульсов кодовых групп. Частота их следования должна быть равна fp= fT/m. В ДК производится
формирование и
распределение канальных импульсов, следующих с частотой fд=fT/mN. ДЦ служит для
формирования импульсных последовательностей, используемых для формирования
сигналов синхронизации по циклам и
сверхциклам. В этом же делителе формируются импульсные последовательности
сигналов управления и взаимодействия.
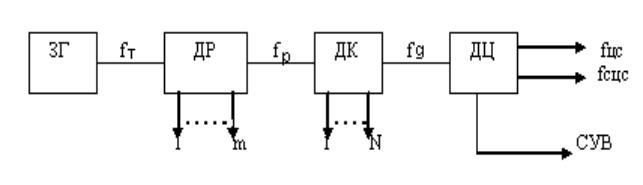
Рисунок 19.3 – Генераторное
оборудование: ДР – разрядный
делитель; ДК–канальный делитель; ДЦ–цикловой делитель; ЗГ–задающий
генератор
Для системы
ИКМ-30 тактовая
частота fT=2048кГц, если m=8, fp=2048/8=256кГц, частота дискретизации канальных импульсов fд=2048/8*32=2048/256=8кГц,а частота сигнала цикловой синхронизации равна 4кГц и СЦС = 8*103/16=500Гц.

Рисунок 19.4 – Структурная
схема ДЧ

Рисунок 19.5 – Схема разрядного делителя и регистра сдвига
Рассмотрим
принцип работы (рисунок 19.4, 19.5)
делителей частоты, обеспечивающих одновременно распределение импульсных
последовательностей одинаковой частоты во времени. В ячейку «И» подаются
тактовые импульсы и сигнал с выхода инвертора, входы которого соединены
с выходом ячейки «И» и отводами от всех ячеек регистра сдвига. Поэтому при поступлении на вход ДР тактовых импульсов
на выходе первого разряда регистра сдвига появится сигнал «1», а на
остальных его выходах сигнал «0». С
поступлением следующего тактового импульса сигнал «1» второго
разряда РС и т.д., процесс будет повторяться до тех пор,
пока не появится сигнал «1» на выходе последнего m-го разряда. После этого цикл
работы делителя разрядов повторяется снова. ГО приемной части оконечной
станции (ОС) строится
аналогично. Его отличие состоит в том, что он не содержит автономного задающего
генератора. Здесь импульсная последовательность тактовой
частоты fT получается от
генератора, синхронизируемого колебанием тактовой частоты, при помощи ВТЧ.
Ввод дискретных
сигналов в групповой цифровой тракт
Ввод
дискретных сигналов (ДС) в групповой тракт (рисунок 19.6)
может быть синхронным и асинхронным. Синхронизация источника информации зависит от ГО цифровой системы, поскольку источник информации может быть удален от
оконечной аппаратуры цифровой системы, для устранения возникающих при этом
расхождений временных положений
последовательностей импульсного канала и импульсов от источника
информации, дискретные сигналы до ввода в
коллектор импульсных потоков пропускаются через устройства буферной памяти.
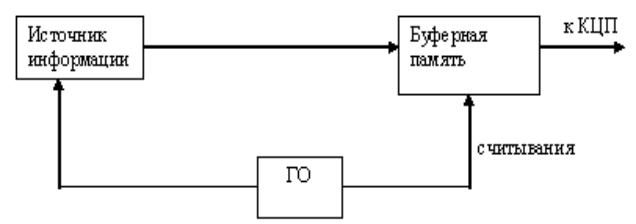
Рисунок 19.6 – Структурная схема
дискретных сигналов в
групповом цифровом тракте
Асинхронный способ ввода дискретной информации
Существуют следующие способы ввода асинхронной дискретной информации: способ
наложения, способ кодирования, способ согласования.
Способ наложения – наиболее простой способ
ввода асинхронных сигналов. Кодовые импульсы стробируются импульсами тактовой частоты fT
канала (рисунок 19.7,а), поступающими от ГО
цифровой системы передачи, а импульсы, полученные стробированием (рисунок 19.7,в), вводятся в коллектор импульсных потоков.

Рисунок 19.7 – Способ
наложения
После
выделения этих импульсов на приемном конце селектором импульсных потоков
выделяется огибающая пакеты импульсов (рисунок 19.7,д). С этой целью последние
подаются на один из раздельных входов триггера, на другой вход подаются
инверсные пакеты импульсов (рисунок 19.8,г).
Выделенная огибающая будет расширена по сравнению с длительностью пакетов
импульсов на интервал Тк, что приводит к смещению фронта
передаваемого импульса. Поскольку максимально возможное смещение фронта
импульса ΔTmax=Tк, то при
рассматриваемом способе ввода
дискретных сигналов краевые искажения могут достигать величины
τ=(Tk/Tu)*100%=(fu/fk)*100% . (19.2)
Рассмотренный
способ ввода дискретных сигналов поменяется для передачи телеграфных сигналов
(скорость передачи 50-200 Бод), а также
для передачи служебных сигналов в групповом цифровом потоке, например, сигналов управления и взаимодействия.
Способ кодирования состоит в том, что в
импульсный канал передается информация о положении фронтов кодовых импульсов
вводимого дискетного сигнала. К этой информации относятся сведения о наличии
фронта импульса, его местоположения относительно соседних импульсов
используемого канала и о его характере (переход от 0 к 1 и наоборот). При этом
в импульсном канале передается информация о положении фронтов кодовых импульсов
вводимого дискретного сигнала: о
наличии фронта; о положении
его относительно соседних импульсов; о его
характере 0 →1 или 1→0. Цифра
«1» говорит о наличии
фронта между импульсами, а «0» о его отсутствии. Если фронт
находится в 1-ой половине
Тк, то будет цифра «1», а
если – во второй Тк, то появится «0». Цифра
1→0 – задний фронт «1»,
0 →1 - передний фронт «0». Поскольку на каждом фронте
дискретная информация (ДИ) составляет не меньше трех символов, то максимально достижимый коэффициент использования каналов равен 0.33, т.е. K=fДИ/fmax,что в
3 раза больше способа наложения.
Недостатком способа наложения является то, что при передаче
нескольких подряд следующих одинаковых
элементарных посылок искажение
символа кодовой группы, несущего информацию о полярности перехода, вызовет
инверсию всех этих посылок вплоть до следующего перехода. Этот недостаток можно
устранить, если периодически передавать информацию о полярности элементарных
посылок.
Способ согласования скоростей более сложный, но более совершенный в отношении повышения коэффициента использования импульсного канала. Сущность
состоит в том, что информация фиксируется в записывающем устройстве (ЗУ), а затем считывается последовательностью импульсов
импульсного канала, частота следования fслед которых
близка к частоте каналов fк, но больше
частоты передачи информационных импульсов fи. Поскольку
частоты fк и fи асинхронны,
отношение Тсч/(Тз-Тсч) будет нестабильным,
тогда появятся неоднородности, знак которых
может меняться. Принятая информация поступает в ЗУ (рисунок 19.8) и одновременно в
обнаружитель временных сдвигов. Записью и считыванием информации
управляет импульсная последовательность импульсного канала.
Данная последовательность в свою очередь поступает от
ГО через корректор временных сдвигов. После
обнаружения временного сдвига корректор на один такт запрещает запись
передаваемого сигнала. Если временные сдвиги будут однородны, то после
считывания восстановится передаваемая последовательность импульсов. При
появлении неоднородности корректор выравнивает скорость передачи цифрового
сигнала.
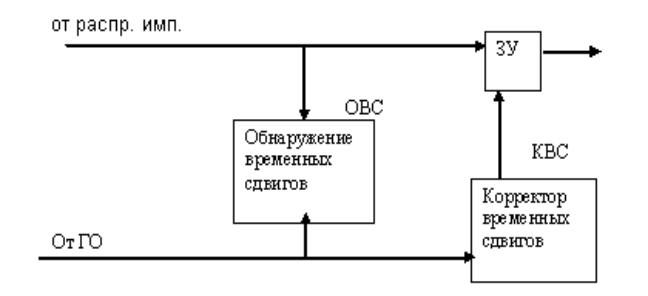
Рисунок 19.8 – Структурная схема приемника
Недостаток данного способа в том, что существует возможность размножения ошибок при передаче
одноименных импульсов ДИ, если искажен символ кодовой группы несущей информацию
о полярности кода. Такая ошибка вызывает инверсию следующих подряд одинаковых
импульсов до следующего перехода. Этот недостаток устраним, если на входе установить корректирующее устройство с
запоминанием предыдущего знака или с передающей
станции передавать информацию о полярности сигнала.
Основные узлы блоков асинхронного сопряжения
Информационные символы через логические ячейки «И»
записываются последовательно в ячейки
памяти «П».
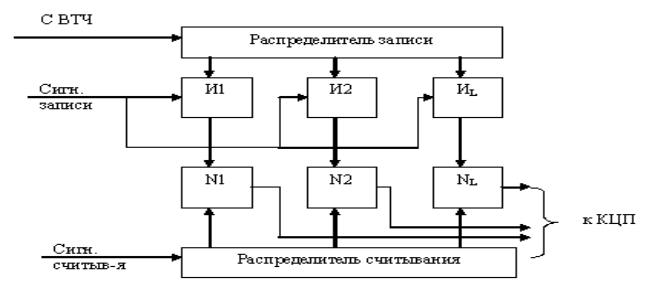
Рисунок 19.9 – Основные узлы блоков асинхронного сопряжения
Процессом
записи (рисунок 19.9) управляют импульсы тактовой частоты fТ. Эти
импульсы через распределитель записи (РЗ) открывают поочередно ячейки,
через которые производится запись сигнала. Считывание производится импульсами, поступающими с
соответствующих выходов распределения считывания (РС). Из-за наличия в цикле
передачи служебных импульсов частота считывания превышает частоту записи.
Поэтому появляются временные
сдвиги между считыванием и записью. Импульсные позиции временных сдвигов
используются для передачи служебных команд. При формировании временных сдвигов на вход ЗУ
продолжают поступать информационные импульсы и для их записи предусматривают
дополнительные ячейки памяти.
Временной
дискриминатор
Временной дискриминатор служит для контроля временных
интервалов между моментами записи и
считывания, а также формирования сигнала запуска передатчика канала согласования скоростей (КСС). На раздельные входы триггера (рисунок 19.10, 19.11) подаются импульсные
последовательности с одинаковых по номеру выходов распределителей записи и
считывания. На выходе триггера формируется двухполярная последовательность
импульсов. Ее скважность определяется взаимным
положением импульсов, записи и считывания,
через ФНЧ подается в РУ («+» РУ1
и «–» РУ2).
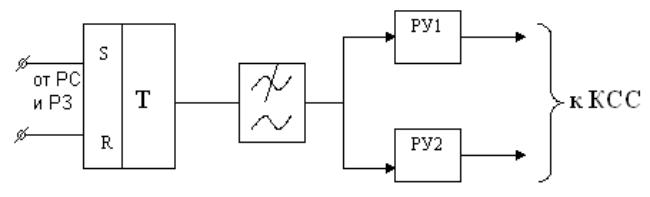
Рисунок 19.10 – Структурная
схема аналогового дискриминатора
Величина
напряжения на выходе ФНЧ зависит от разности длительностей «+» и «–» импульсов на выходе триггера. При нормальной работе ЗУ момент считывания сдвинут относительно момента записи на половину периода тактовой частоты fT,
скважность сигнала на выходе триггера равна двум. На выходе напряжение будет
равно 0. Когда временной интервал между
импульсами записи и считывания достигает величины, при которой необходимо
положительное и отрицательное согласование скоростей, на выходе ФНЧ появляется достаточное
по величине «+» или «–» напряжение для срабатывания соответствующего РУ. И к
передатчику согласования скоростей посылается сигнал, соответствующий
положительному или отрицательному согласованию скоростей. Импульсы с
выхода триггера подаются к ячейкам И1 и И2. На другие входы подводятся контрольные
последовательности импульсов с распределителя записи.
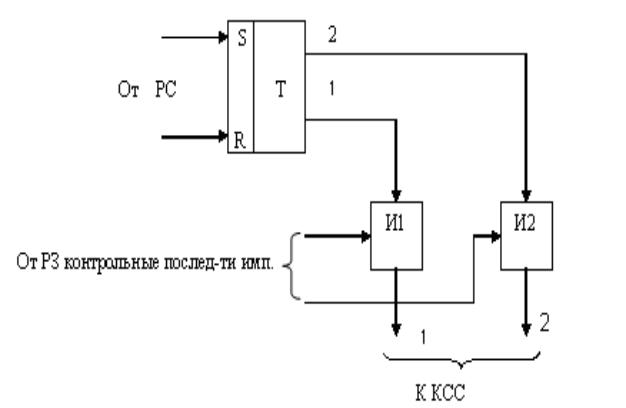
Рисунок 19.11– Структурная схема цифрового временного дискриминатора (ЦВД)
Временное положение этих
последовательностей выбирается так, чтобы при нормальном режиме ЗУ на ячейках «И»
импульсы с триггера не совпадали по времени с контрольными импульсами. При
временных интервалах между импульсами записи и считывания, достигающих величины, при
которой необходимо согласование скоростей в
зависимости от ее вида, на выходе соответствующей ячейки «И» появляется импульс, поступающий затем к передатчику КССпередачи.
8 Лекция №20. Формирователь
команды согласования скоростей (КСС)
Цель лекции: рассмотрение
принципов согласования скоростей передающих и приемных цифровых сигналов.
Команды
согласования скоростей (КСС) (рисунок 20.1) должны обладать примерно такой же
помехоустойчивостью, как и синхросигналы. Это
объясняется тем, что искажение упомянутой команды в системе цифровой связи
первого порядка приводит к сбоям
цикловой синхронизации в соответствующих этой команде системе (n-1)-го порядка и затем к сбоям
цикловой синхронизации во всех
объединяемых системах более низкого порядка. При односторонних согласованных скоростях количество символов, требуемое для передачи указанной информации, гораздо меньше, чем в системах с
двухсторонним согласованием скоростей. Такие системы называются системами с
двухсторонним согласованием скоростей и двухкомандным управлением. По числу
передаваемых команд подобные системы идентичны системам с односторонним
согласованием скоростей. Когда временной интервал между импульсами записи и
считывания превышает период считывания Тсч, то формируются две подряд
следующие команды одного знака, по которым
производится коррекция временных положений импульсов считывания.
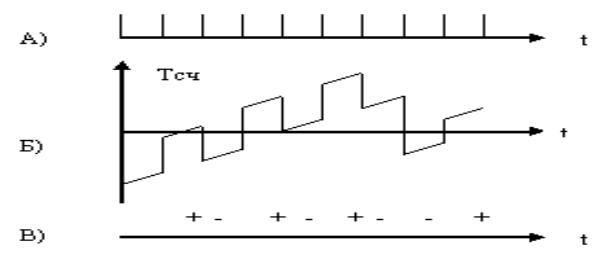
Рисунок 20.1 – Формирование КСС
Приемник команд согласования скоростей (КСС)
В
приемнике КСС (рисунок 20.2) производится опознавание вида и
коррекция ошибок принимаемых команд.
Обычно команды согласования скоростей передаются кодовыми группами вида 00..0 и 11..1, что позволяет реализовать
опознаватель этих команд в виде счетчика числа импульсов и осуществить
правильное их опознавание, если число искаженных символов не
превосходит половины общего числа символов в команде. После опознавания КСС поступают на
анализирующее устройство и корректор ошибок. Если временные сдвиги между
импульсами записи и считывания в передающем блоке асинхронной системы (БАС)
достигают величины +-Тсч, то на соответствующий вход анализирующего устройства
поступают сдвоенные команды (++ или --), по
которым на выходе ячеек и формируется необходимый сигнал для коррекции
временного положения импульсов считывания. При искажении команды согласования
скоростей, когда формируются три
подряд следующие команды одного знака (+++ или ---), со счетчика команд «+» или
«-» корректора ошибок выдается сигнал
коррекции ошибок. Ошибки
опознавания наиболее просто корректируются в системе с двухсторонним согласованием
скоростей и двухкомандным управлением. Искажение одной из чередующихся команд
приводит к появлению трех подряд следующих команд одного знака. По этому
признаку (+++) можно обнаружить и скорректировать искажение чередующихся команд
согласования скоростей. Если искажается одна из сдвоенных команд, то
формируется сдвоенная команда противоположного знака. Для обнаружения и
коррекции такого искажения необходимо передавать информацию по специальному
импульсному каналу о знаке изменения временного интервала между моментами
записи и считывания.
На рисунке 20.3 цифровой поток (ЦП) низкого уровня (Е1) подается на вход 1 БАС с помощью ВТЧ и выделяется тактовая частота
(fT), которая управляет записью ЗУ. Записью ЗУ порции
информации управляет fT
этого же потока, а считыванием информации управляет сигнал с ГО передачи через комплект КСС. Таким образом, информация считывается из ЗУ и в КЦП происходит
объединение потоков более низких уровней, это все происходит при отсутствии неоднородностей. При
наличии неоднородностей временной дискриминатор (ВД) сравнивает между собой fT записи и fT считывания. Частоты записи и считывания различны, ВД определяет соответствие
количества импульсов тактовой частоты fT
записи количеству импульсов тактовой частоты fT
считывания. И в случае их расхождения появляется
сигнал на одном из выходов (+ или -) ВД.
Появление
сигнала говорит о наличии неоднородностей. Если «+», то нужно изъять дополнительный импульс из
считывания, если «-», то нужно
вставить. Эти сигналы подаются на КСС передачи и
управляют схемами «ИЛИ», «НЕТ». Если не хватает одного импульса,
то дополнительный импульс вводится через схему «ИЛИ». Если имеется лишний
импульс, то подается сигнал запрета в выход КСС на прохождение одного импульса считывания путем затирания схемы «НЕТ»,
информация об изъятых или вставленных
импульсах считывания подается на КСС передачи, на
КЦП, где размещается в служебных символах КСС.
На приемной части из ЦП выделяется fT
объединенного сигнала и циклическая синхронизация, которая синхронизирует ГО приема и ГО передачи, из ЦП через схему «И1» записывается в ЗУ. После считывания с частотой, равной частоте записи,
восстанавливается первоначальная скорость переданного ЦП от каждой из объединяемых в тракте передачи асинхронных
систем. Средняя частота считывания устанавливается устройством фазовой
автоподстройки частоты (ФАПЧ).
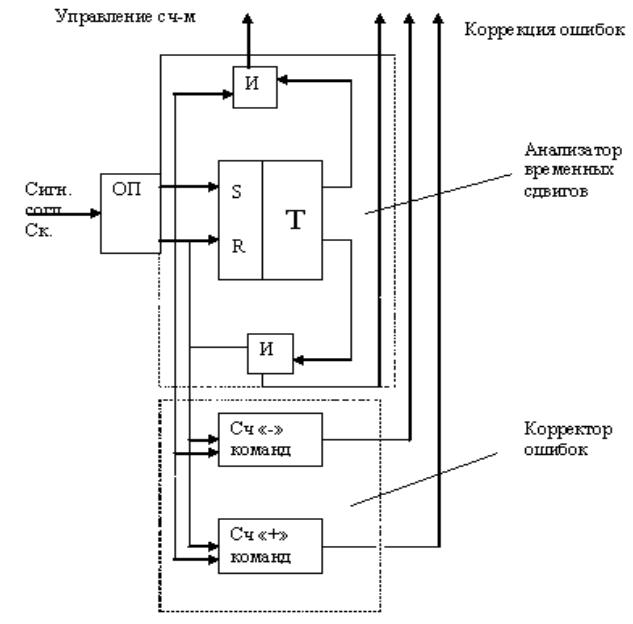
Рисунок 20.2 – Приемник
команд согласования скоростей (КСС)
Генератор
выдает генерируемую частоту fген, которая для
сравнения с опорной частотой fоп должна быть
кратна или совпадать с частотой генерации. На
выходе схемы вычитания при совпадении частот будем получать сигнал разностной частоты. Этот сигнал управляет частотным дискриминатором (ЧД). Если fоп и fген имеют
большое расхождения, то работает
ЧД, которое пропорционально разности fоп и fген – сигнал с
выхода ЧД управляет ГУН, чтобы fоп и fген совпали по
величине (имеем ООС).
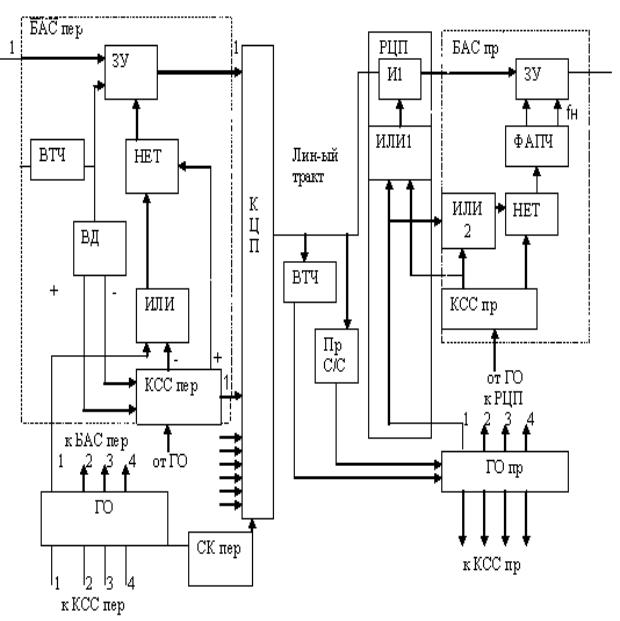
Рисунок 20.3 – Схема оборудования для объединения асинхронных
цифровых потоков, где ВД–временной дискриминатор; КЦП–коллектор
цифрового потока; КСС–команда согласования скоростей; БАС–блок
асинхронного согласования; ФАПЧ–фазовая
автоподстройка частоты
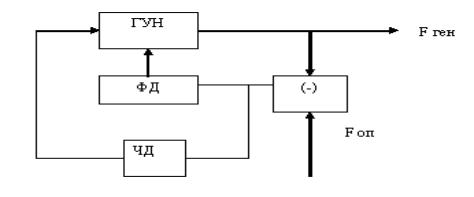
Рисунок 20.4 – Схема ФАПЧ, где ГУН–генератор, управляемый напряжением
При fген= fоп ЧД
отключается и начинает работать фазовый дискриминатор (ФД), который
вырабатывает сигнал ошибки, пропускаемой
разности фаз fген и fоп, управляет ГУН, чтобы фазовое
соотношение fген и fоп были
уравновешены. При наличии в принятой последовательности согласующих тактовых интервалов с приемника КСС подается
к ЗУ сигнал запрета записи информации. Если принимается последовательность
импульсов (символов), из которой был исключен тактовый интервал, через ячейку «ИЛИ1» открывается
ячейка «И1»
распределителя импульсов и тем самым вводится дополнительный информационный
символ в ЗУ, который одновременно вводится через ячейку «ИЛИ2» в сигнал
управления записью.
Линейный тракт проводных ЦСП
В линейный
тракт поступает двоичный сигнал, в котором символы 0 и
1 соответствуют импульсу и паузе. На передаче с помощью преобразователя
кода (ПК) передачи двоичный сигнал преобразуется в цифровой импульсный
сигнал, удобный для передачи по проводным
линиям связи. Для увеличения дальности
действия ЦСП линия разбита на регенерационные участки, между которыми установлены НРП и ОРП.
Назначение регенераторов
состоит в восстановлении формы передаваемых импульсных сигналов. Сигналы в
точках 1 и 2 точно совпадают друг с другом. На приемном конце, кроме восстановления формы импульсных сигналов, осуществляется обратное преобразование импульсного
цифрового сигнала в двоичный при помощи ПК приема.
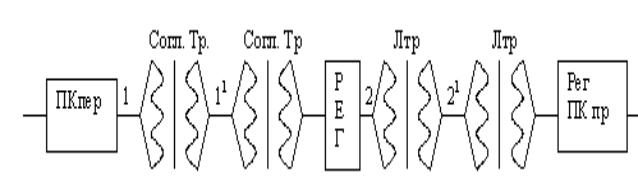
Рисунок 20.5 – Структурная
схема линейного тракта ЦСП
Как видно из рисунка 20.5, ЛТР предназначен для согласования
входного и выходного сопротивления и волнового сопротивления линии, что
уменьшает энергию отраженных волн от ее концов, и,
следовательно, улучшает
условия прохождения импульсного цифрового сигнала по регенерационному участку.
При применении симметричных кабелей с помощью согласующих трансформаторов
обеспечивается необходимое переходное затухание на ближний и дальний конец,
облегчается организация служебной связи (СС), дистанционное питание (ДП) и необслуживаемый регенерационный пункт (НРП).
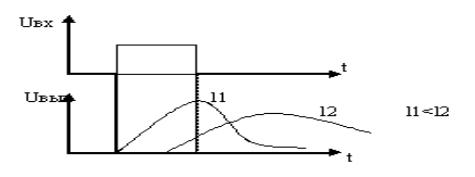
Рисунок 20.6 – Форма выходного
импульса
Если же
принимать в расчет все первичные параметры линии и учитывать их распределенный
характер, то форма искаженного выходного импульса (рисунок
20.6) приближается к гауссовской кривой, причем с увеличением частоты уменьшается высота импульса и возрастает его длительность (τ).
Такие искажения формы импульсов называются
линейными искажениями первого рода. Так как затухание
линии возрастает с увеличением частоты, то можно считать, что линейные
искажения первого рода связаны с подавлением высокочастотных компонент импульсных сигналов. Переходной процесс определяется постоянной времени.
На рисунке 20.7,б показана форма импульсного сигнала на выходе
согласованного трансформатора как разность двух переходных процессов.
Характерная особенность искажения формы импульса состоит в том, что возникает
длительное последействие, причем τи<<τтр.
Такие искажения носят название линейных искажений второго рода. Они связаны с
подавлением низкочастотных компонент импульсного сигнала.
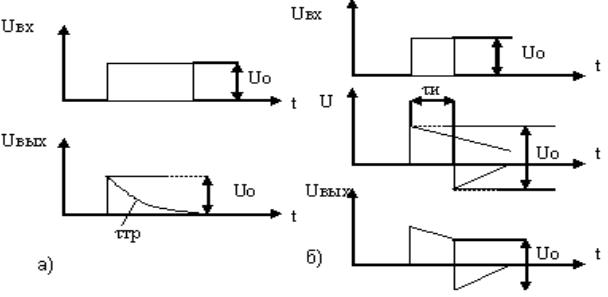
Рисунок 20.7 – Формы импульсного сигнала на выходе
согласованного трансформатора
9 Лекция №21. Коды, используемые в цифровых
линейных трактах (ЦЛТ)
Цель лекции: изучение кодов,
используемых в цифровых линейных трактах.
Коды, используемые в линейных трактах ЦСП, должны удовлетворять следующим требованиям: код не должен содержать постоянной
составляющей, что позволило бы использовать сигнальные провода (цепи) для
организации ДП НРП постоянным током; энергетический
спектр используемого кода должен
занимать как можно более узкую полосу частот, желательно также, чтобы максимум
спектра лежал в области более низких частот, это
обстоятельство позволило бы использовать тракт и канал с меньшей полосой
пропускания, а также увеличило бы длину
регенерационного участка, т.к. затухание увеличивается с ростом частоты; код должен
иметь возможность выделять сигнал тактовой частоты
fT; код должен
обладать способностью контролировать появление ошибок.
Отсутствие
постоянной составляющей означает, что среднее значение импульсов, переданных в
линию и принятых в сумме N-числовых
значений ai, должно стремится к нулю: аi=![]() . В условиях
двоичного или однополярного кода выполнение этого условия невозможно, так как в
случае однополярных импульсов значение числовой суммы со временем будет только
нарастать. Обеспечить значение цифровой суммы, близкое к «0», можно, использовав код
с противоположной полярностью импульса, в
котором вероятность появления импульсов противоположной полярности будет
примерно одинакова, т.е. это требует замены двухполярного двоичного кода на
двухуровневый троичный код (т.е. ai=0,1,-1). Также код должен обладать некоторой избыточностью.
Двоичный ИКМ сигнал, полученный
после кодера, имеет избыточность, равную нулю, то есть любая комбинация
символов является разрешенной, в таком коде выявить ошибку невозможно. Избыточность можно получить, например, увеличив число
уровней разрешенных значений с 2 до 3. Избыточность такого кода составляет
0,58, а само преобразование бинарного
кода осуществляется следующим образом: 1В–1Т, т.е. один символ двоичного кода преобразуется в один символ
троичного кода.
. В условиях
двоичного или однополярного кода выполнение этого условия невозможно, так как в
случае однополярных импульсов значение числовой суммы со временем будет только
нарастать. Обеспечить значение цифровой суммы, близкое к «0», можно, использовав код
с противоположной полярностью импульса, в
котором вероятность появления импульсов противоположной полярности будет
примерно одинакова, т.е. это требует замены двухполярного двоичного кода на
двухуровневый троичный код (т.е. ai=0,1,-1). Также код должен обладать некоторой избыточностью.
Двоичный ИКМ сигнал, полученный
после кодера, имеет избыточность, равную нулю, то есть любая комбинация
символов является разрешенной, в таком коде выявить ошибку невозможно. Избыточность можно получить, например, увеличив число
уровней разрешенных значений с 2 до 3. Избыточность такого кода составляет
0,58, а само преобразование бинарного
кода осуществляется следующим образом: 1В–1Т, т.е. один символ двоичного кода преобразуется в один символ
троичного кода.
В ЦСП
возможно несколько разновидностей преобразования 1В–1Т: код с чередованием импульсов (ЧПИ); код высокой
плотности единиц КВП.
Код с ЧПИ осуществляет
чередование импульсов положительной и отрицательной полярности при
преобразовании единичных символов в зависимости от числа нулей между ними (рисунок 21.1). Максимум энергетического спектра кода с чередованием полярности импульсов (ЧПИ) лежит
на частоте fT/2=1024кГц,
т.е.
понизится в 2 раза по сравнению с fT двоичного сигнала. При ЧПИ можно
выявить ошибки в коде, т.к. ошибочный символ будет нарушать порядок чередования
импульсов. Но не все ошибки, возникающие в коде, могут нарушать принцип
чередования. Например,
если ошибки возникают в нескольких символах подряд, то порядок чередования
может не нарушаться. Данный код позволяет выделить сигнал тактовой частоты fT, т. к. его спектр представляет сигнал с этой частотой.
Достоинство кода с
ЧПИ состоит в чрезвычайной
простоте обратного перехода к двоичному
сигналу (это происходит в ПК приема).
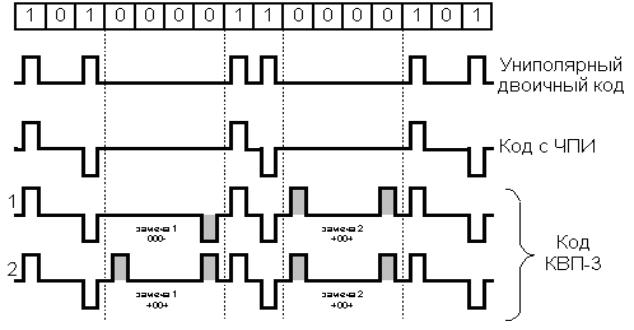
Рисунок 21.1 – Временная диаграмма заданной последовательности
в кодах ЧПИ и КВП-3
А недостаток кода с
ЧПИ состоит в том, что находится большое количество нулей,
передаваемых в коде, последовательность составляющих из одних нулей не содержит
в себе составляющую fT, и
поэтому приводит к затруднению выделения сигнала fT из фрагмента кода, а это может
вызвать нарушение работы устройства выделителя fT генераторов и возможность
появления ошибок при регенерации. С целью усовершенствования кода с ЧПИ был разработан специальный модифицируемый код для
устранения этого недостатка. Это код КВП. Наибольшее
распространение получил код КВП-3.
Принцип образования КВП-3
Код КВП-3 имеет тот же принцип построения, как и код с ЧПИ, если
количество нулей между единицами не более трех. Комбинация 0000 заменяется одной из двух последовательностей типа
В00V или 000V (рисунок 21.1). Импульс В чередуется в полярности и соответствует
коду с ЧПИ. Импульс V,
полярность которого повторяет полярность последнего импульса В, используется в
том случае, когда между появлением
последнего V имеется нечетное число импульсов В (если четное число В, то комбинация принимает вид В00V) Код КВП-3 имеет практически тот же спектр, что и код с ЧПИ, и
максимум этого спектра лежит на частоте fT=1024кГц.
При
использовании КВП-3 также возможен контроль появления ошибок, и о наличии
ошибок судят по наличию нескомпенсированных импульсов либо по нарушению чередования импульсов V. Преобразование
исходной ИКМ последовательности в коде с
ЧПИ может быть организовано с помощью простой
структурной схемы (рисунок 21.2). Входная
последовательность двоичного ИКМ сигнала поступает на счетный вход триггера (Т), которая от каждого исходного импульса перебрасывается в
противоположное состояние.
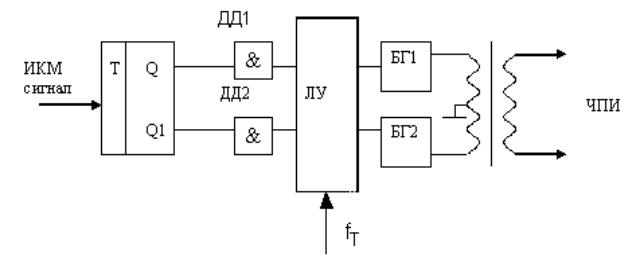
Рисунок 21.2 – Преобразование исходной ИКМ последовательности в
коде с ЧПИ
На выходах Q триггера появляются противоположные сигналы, которые будут разрешающими
для проникновения входной последовательности импульсов через схемы совпадения
ДД1 и ДД2. В результате каждый последующий единичный импульс будет проходить
через другую схему. Блокинг-генераторы (БГ1 и БГ2) генерируют хорошие
импульсы с крутыми фронтами заданной
длительности. Токи БГ1 и
БГ2 разные по направлению, и
соответственно магнитные поля тоже разные в обмотках трансформатора. Во второй
обмотке появятся разнополярные импульсы (т.е. код с ЧПИ). При необходимости реализации кода КВП-3 механизм схемы совпадения и формирования импульсов
включает логическое
устройство (ЛУ), и на него
подается fT для
подсчета числа нулей. ЛУ формирует
управляемый сигнал БГ в соответствии со своей логикой работы, и на выходе получается КВП.
Пути повышения эффективности ЦСП
Повышение эффективности ЦСП, то есть улучшение их
технико-экономических показателей, осуществляется в следующих
направлениях: совершенствование
аппаратуры ЦСП, т.е. разработка нового поколения иерархических ЦСП,
обеспечивающая расширение
функциональных возможностей аппаратуры, повышение ее надежности, уменьшение
габаритных размеров, снижение потребляемой мощности и т.п.; применение в качестве направляющих систем ВОЛС; использование более эффектных методов кодирования,
например, адаптивная дельта-модуляция (АДМ) или адаптивная
дифференциально-импульсно-кодовая модуляция (АДИКМ); использование в линейном тракте более эффективных кодов
(например, многоуровневых кодов); разработка
статистических СП, учитывающих особенности
передачи сигналов по каналам связи и др.
В последних
разработках ЦСП нашли применение микросхемы на МОП– структурах и с барьером
Шотки, специализированные большие
интегральные схемы (БИС),
большие гибридные интегральные схемы (БГИС), а
также микропроцессорные схемы, которые
наиболее эффективны в оборудовании диагностики и контроля.
Одной
из последних модификаций аппаратуры ИКМ-30 является то, что в результате переработки основных блоков почти в 2
раза уменьшена потребляемая мощность, улучшены частотная и фазовая
характеристики каналов, повышена надежность аппаратуры. Кроме того, разработаны
блоки линейных переключений и сервисного обслуживания, позволяющие отыскать
место неисправностей и имеющие стык с автоматизированной системой отслеживания,
создаваемой на ГТС. В данной модификации аппаратуры предусмотрена также
возможность установки согласующих устройств отдельно от конечной системы ИКМ-30 ( например, в коммутируемом цехе).
В унифицированной аппаратуре кодирования АКУ-30 по сравнению с АЦО-30
в 5 раз снижена потребляемая мощность (15 вместо 80 Вт), при таком же сокращении габаритных размеров, обеспечено
формирование с заданными параметрами стыков.
Известные
достоинства ВОЛС в сочетании с цифровыми методами передачи обеспечивают эффективное использование световодных ЦСП практически на
любых участках ЕАСС. Целесообразность работы именно ЦСП на ВОЛС связана с
существенной нелинейностью модуляционных характеристик излучателей, квадратичным и дискретным характерами процесса
фотодетектирования и другими особенностями оптического тракта, затрудняющими
применение аналоговых методов передачи.
В настоящие
время наиболее освоены диапазоны 0,85 и 1,3 мкм, в которых затухание
многомодовых оптических волокон находится в пределах 1…5 дБ/км. Это позволяет
получить участки регенерации длиной до 40 ….50км. Освоение диапазона свыше 2 мкм при использовании
одномодовых волокон дает возможность еще больше повысить эффективность
световодных ЦСП, например,
разработанные оптические кабели для диапазона волн 4 мкм с потерями порядка 0,01 дБ/км при строительной длине кабеля до 20 км. В
этом же диапазоне разработана технология сращивания волокон оптического кабеля
с потерями 0,06 дБ на каждом соединении.
Имеются сведения об изготовлении оптических волокон с чрезвычайно малыми
потерями (до 10-3дБ/км) в диапазоне волн 2…12 мкм, что позволяет
обеспечить длину участка регенерации до 1000км. Дальнейшее совершенствование
световодных ЦСП связано также с широким использованием устройств интегральной
оптики, которые оказываются
малогабаритными, надежными, обладают хорошей
температурной стабильностью и достаточной механической прочностью.
В
рекомендации G761 МККТТ
предусматривается возможность использования 60-канального
транскодера, позволяющего
перейти от 2-х стандартных цифровых потоков, передаваемых со скоростью 2,048
Мбит/с и образованных методом ИКМ, к
одному цифровому потоку с той же скоростью, но при использовании АДИКМ и
наоборот. Использование многоуровневых кодов в магистральных ЦСП позволяет
сделать их экономически конкурентоспособными с аналоговыми
системами передачи (АСП), поскольку
при этом уменьшается fT
сигнала в линию, что приводит к увеличению длины участка регенерации, которая может быть доведена до длины усилительного участка АСП
соответствующего уровня. Перспективными
для организации линейных трактов ЦСП высших ступеней иерархии являются
пятиуровневые коды, позволяющие снизить тактовую частоту
fT в 2 раза.

Рисунок 21.3 – Использование
60-канального транскодера
Четверичная
ЦСП со скоростью передачи 139, 264 Мбит/с (ИКМ-1920)
по своим технико-экономическим характеристикам уступает аналоговой системе
К-3600, поскольку при той же длине
участка (3км) позволяет организовать в 2 раза
меньше число каналов тональной частоты (ТЧ). Поэтому большое внимание уделяется разработке
модификации четверичных ЦСП. ИКМ-1920х2, позволяющая за
счет применения пятиуровневого кода в линии удвоить число каналов без изменения длины участка регенерации. К таким кодам относится, например, блочный балансный код типа 6В3Q, вариация цифровой суммы которого
может достигать 13. Снижение fT в 2 раза может быть достигнуто и с помощью разработанного в
нашей стране неблочного пятиуровневого кода типа БК-45, который по сравнению с
кодом 6В3Q дает
возможность получить более сбалансированный сигнал.
10 Лекция №22. Регенерация цифрового сигнала
Цель
лекции: рассмотрение принципов регенерации цифровых сигналов, а также фазовых флуктуаций и степени их влияния на
качество передачи.
Регенераторы цифрового сигнала (рисунок 22.1) применяются с внутренней
синхронизацией (самосинхронизирующие), с полным восстановлением временных интервалов. Колебание fT выделяется
из спектра входного сигнала. При
внешней синхронизации необходимо было бы обеспечить подачу в регенератор
сигналов по отдельной цепи. Регенераторы
с внутренней синхронизацией являются прямого действия, так как выделение
fT происходит не из выходного сигнала. При выделении fT из
выходного сигнала организовывается цепь
отрицательной связи, что приводит к умножению помех, т.е. уменьшается помехозащищенность. В процессе регенерации выполняются следующие операции: усиление
восстанавливаемых импульсов и коррекция их формы; стробирование
откорректированных импульсов, в результате чего создаются такие условия, при которых импульсы на
выходе формируются в строго определенные моменты времени; сравнение полученного после стробирования значения амплитуды импульсов с пороговым (эталонным)
направлением; формирование
новых импульсов с заданными параметрами.
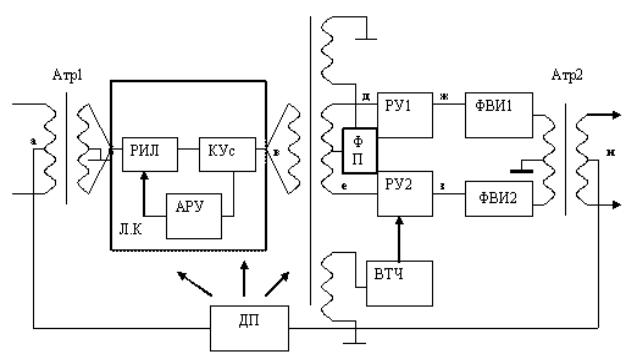
Рисунок 22.1 – Структурная
схема регенератора, где РИЛ–регенератор
искусственной линии;
ВТЧ–выделитель тактовой частоты; ЛК–линейный
корректор; ФП–формирователь порога; Кус–корректирующий
усилитель; РУ–регулирующее устройство; ФВИ–формирователь выходных импульсов
Сигнал на
входе цепи, один импульс которого показан на
рисунок 22.2, а, проходя по цепи, искажается этой цепью. При
этом уменьшается амплитуда сигналов, и появляется длительное последействие. На
рисунке 22.2, б этот искаженный сигнал на входе
регенератора показан увеличенным по амплитуде. Усиление и коррекция сигнала
осуществляется Кус.
К устройствам коррекции цифрового сигнала выставляются следующие требования: уменьшение влияния
между импульсами за счет последствия помех; Кус должен
уменьшить шумы интерференции, не увеличивая при этом мощность других помех. Мощность собственных помех кабеля и помех
линейных переходов пропорциональна
полосе пропускания Кус. Поэтому для уменьшения этих помех желательно полосу
пропускания Кус делать поменьше, однако уменьшение полосы пропускания Кус
увеличивает длительность переходных процессов, а значит, и мощность интерференционных помех, поэтому полоса
пропускания должна быть побольше.
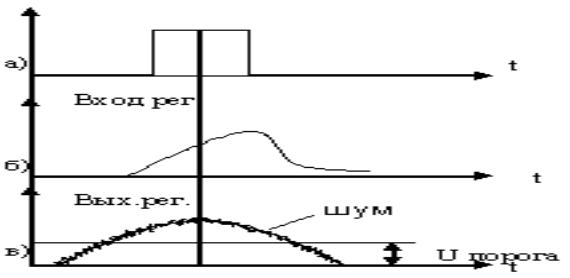
Рисунок
22.2 а) сигнал
на входе цепи; б) сигнал на
входе регенератора;
в) откорректированный импульс
К этому
подходит полоса квазитроичного сигнала Δfикм![]() fT, т.к. полоса пропускания тракта ограничена, то форма откорректированного импульса не может быть
прямоугольной (рисунок 22.1,в). Коррекция формы импульса осуществляется до полного
или частичного устранения влияния одних импульсных посылок на другие за счет
концентрации энергии импульсов в их
тактовых интервалах (рисунок 22.1,в), к выходу линейного корректора подключен блок ВТЧ коротких
стробированных импульсов
(рисунок 22.1,г). Стробированные импульсы формируются относительно
входных сигналов так, чтобы оказаться в середине тактовых интервалов, где амплитуда входных
сигналов будет максимальная. Это также обеспечивает наименьшую вероятность
ошибки в процессе регенерации. Стробированные импульсы (рисунок 22.1,г) подаются
на вход РУ (рисунок 22.1,д) и (рисунок 22.1,е).
Кроме этого, на РУ1 и РУ2 через трансформатор (Тр) подаются
корректирующие импульсы, смещенные на величину порогового напряжения (U
порог точки Д и Е). Последнее ФП содержит выпрямитель, работающий на
генерационную нагрузку, и он вырабатывает постоянное напряжение, равное ½
амплитуды импульсов линейного корректора. Так
как АРУ обеспечивает постоянство амплитуды импульсов на выходе корректора, то
порог решения практически неизменен. В РУ
происходит стробирование в каждом такте поступающих символов, если в момент
прихода на РУ стробирующего импульса в ВТЧ входной сигнал имеет «+» полярность,
т.е.
разность между входным сигналом и пороговым напряжением, то на выходе РУ
формируется импульс, поступающий на соответствующий формирователь (рисунок 22.1 ж,з). Если разность будет «-», то на выходе РУ импульс не
формируется. Формирователи ФВИ1 и ФВИ2 подключены через дифференциальный
трансформатор, то на выходе
Тр2 сформированные импульсы будут разной полярности. Основная задача линейного корректора (ЛК) обеспечить максимальное отношение
(сигнал/ помеха) на входе РУ и ВТЧ. Для подавления межсимвольной помехи в
выходном каскаде ЛК корректирующий усилитель компенсирует затухание и
нелинейность ФЧХ, предшествующего участка в некоторой полосе частот. ВТЧ выдает fT и формирует стробирующие тактовые импульсы, с помощью которых осуществляется синхронизация в
регенераторе. В идеальном
случае восстановление импульсов
последовательности на выходе
регенератора является точной копией передаваемой импульсной последовательности. В реальности она отличается от исходной, вследствие наличия ошибок регенерации за счет воздействия
помех и изменения интервалов между
импульсами и из-за флуктуации стробирующих импульсов.
fT, т.к. полоса пропускания тракта ограничена, то форма откорректированного импульса не может быть
прямоугольной (рисунок 22.1,в). Коррекция формы импульса осуществляется до полного
или частичного устранения влияния одних импульсных посылок на другие за счет
концентрации энергии импульсов в их
тактовых интервалах (рисунок 22.1,в), к выходу линейного корректора подключен блок ВТЧ коротких
стробированных импульсов
(рисунок 22.1,г). Стробированные импульсы формируются относительно
входных сигналов так, чтобы оказаться в середине тактовых интервалов, где амплитуда входных
сигналов будет максимальная. Это также обеспечивает наименьшую вероятность
ошибки в процессе регенерации. Стробированные импульсы (рисунок 22.1,г) подаются
на вход РУ (рисунок 22.1,д) и (рисунок 22.1,е).
Кроме этого, на РУ1 и РУ2 через трансформатор (Тр) подаются
корректирующие импульсы, смещенные на величину порогового напряжения (U
порог точки Д и Е). Последнее ФП содержит выпрямитель, работающий на
генерационную нагрузку, и он вырабатывает постоянное напряжение, равное ½
амплитуды импульсов линейного корректора. Так
как АРУ обеспечивает постоянство амплитуды импульсов на выходе корректора, то
порог решения практически неизменен. В РУ
происходит стробирование в каждом такте поступающих символов, если в момент
прихода на РУ стробирующего импульса в ВТЧ входной сигнал имеет «+» полярность,
т.е.
разность между входным сигналом и пороговым напряжением, то на выходе РУ
формируется импульс, поступающий на соответствующий формирователь (рисунок 22.1 ж,з). Если разность будет «-», то на выходе РУ импульс не
формируется. Формирователи ФВИ1 и ФВИ2 подключены через дифференциальный
трансформатор, то на выходе
Тр2 сформированные импульсы будут разной полярности. Основная задача линейного корректора (ЛК) обеспечить максимальное отношение
(сигнал/ помеха) на входе РУ и ВТЧ. Для подавления межсимвольной помехи в
выходном каскаде ЛК корректирующий усилитель компенсирует затухание и
нелинейность ФЧХ, предшествующего участка в некоторой полосе частот. ВТЧ выдает fT и формирует стробирующие тактовые импульсы, с помощью которых осуществляется синхронизация в
регенераторе. В идеальном
случае восстановление импульсов
последовательности на выходе
регенератора является точной копией передаваемой импульсной последовательности. В реальности она отличается от исходной, вследствие наличия ошибок регенерации за счет воздействия
помех и изменения интервалов между
импульсами и из-за флуктуации стробирующих импульсов.
Фазовые
флуктуации цифрового сигнала и их влияние на качество передачи
Под фазовыми флуктуациями понимаются случайные
составляющие времени возникновения стробирующих импульсов регенераторов, которые вызывают случайные положения этих импульсов. Фазирование флуктуации может
быть систематическим и случайным. Систематические составляющие обусловлены параметрами самого
линейного сигнала. Для всех регенераторов они одинаковы, и их величина растет пропорционально числу регенераторов. Случайные составляющие фазовой флуктуации (ФФ) вызваны расстройкой контуров выделяемой тактовой частоты fT отдельных регенераторов, а также действием переходных помех. Наличие ФФ в принятом на
приемном ИКМ сигнале приводит к нестабильности (колебаниям) fT, т.к fT выдается непосредственно из принимаемого сигнала. Нестабильность fT может привести к взаимному влиянию каналов друг на друга и появлению
искажений восстановленного сигнала с помощью ФНЧ. Когда исходный аналоговый сигнал описывается функцией S(t), то при наличии ФФ сигнал на
выходе декодера можно принять в виде фазомодулированной последовательности
дискретных отсчетов
Y(t)= ,
(22.1)
,
(22.1)
где Т– номинальный
период отсчетов;
t– текущее время;
n–число отсчетов за t;
![]() –временное отклонение
отсчетов от их нормируемого положения за счет ФФ. Спектр этой последовательности можно определить путем
выполнения преобразования Фурье
–временное отклонение
отсчетов от их нормируемого положения за счет ФФ. Спектр этой последовательности можно определить путем
выполнения преобразования Фурье
Y(w)=![]() e-iwTe-iwEп , (22.2)
e-iwTe-iwEп , (22.2)
где S(n)–амплитуда отсчетов;
Еn–временное отключение n-го отсчета;
n–число отсчетов. Полагая, что сигнал с данным спектральным составом подается на
ФНЧ, который включается на выходе декодера, и величина wEn на граничной частоте ФНЧ будет <<1 , то получим выражение (22.3). Как видно из выражения (22.3), спектр сигнала при наличии ФФ состоит из спектра самого
сигнала (1) (дискретизация аналогового сигнала) и из составляющей, определяемой спектром, а также умноженной на нестабильность (2).
Y(w)=![]() Sn*e-iwT - iw
Sn*e-iwT - iw![]() En*Sn*eiwT
. (22.3)
En*Sn*eiwT
. (22.3)
(1)
(2) (3)
Последнее выражение из формулы (22.3) показывает, что на выходе ФНЧ, помимо самого аналогового
сигнала появляется дополнительный спектр (3). Это дополнительная часть спектра
является источником шумов и искажений, причина которых заключается в ФФ
сигнала. ФФ состоят из шумов и переходных помех. Для уменьшения ФФ, вносимых
контуром, следует уменьшать его расстройку и добротность. Однако
при уменьшении добротности
увеличивается влияние зоны нечувствительности (дрейф), а это приведет к
неустойчивой работе ВТЧ. На практике добротность контура выбирается в
пределах 80-120. Полная величина расстройки контура складывается из погрешности
настройки при ее изготовлении и расстройки, связанной со сторонним
изменением температурных режимов в условиях эксплуатации. В целом относительная расстройка контура оказывается менее 10-4.
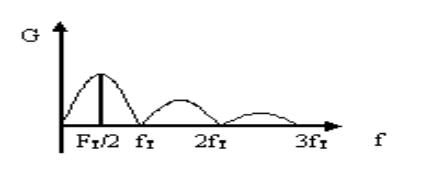
Рисунок
22.3 – Спектр выпрямленной последовательности
Если средняя частота
полосы пропускания контура fo совпадает с fT, т.е. с символами в исходной последовательности fT, то в полосу пропускания контура попадают составляющие спектра выпрямленной последовательности, симметричные относительно fT и практически с равными амплитудами. В этом случае
фазовая модуляция отсутствует. Зная спектральную плотность этих
помех за счет фазовых флуктуаций, можно определить величину защиты от этих
помех на выходе ФНЧ. Расчеты показывают, что для величины защищенности, вызываемой помехами от фазовых флуктуаций, которая равна не менее 40дБ, эффективное значение флуктуаций отсчетов
на выходе ЦАП не должно превышать 810нс, т.е. для вторичной цифровой системы (ИКМ-120) Данная величина соответствует семи тактовым интервалам, и сама по себе эта величина
является большой, т.к. смещение стробированных импульсов относительно номинального
положения будет определяться не долями тактового интервала, а единицами этих интервалов.
Вторичная система используется на замкнутых сетях длиной до 600 км для накапливания фазовых сдвигов, которые не должны превышать двух тактовых интервалов, что существенно
меньше 810нс. Иными словами, фазовые флуктуации не «определяют погоду», а определяют качество связи, или защищенность от помех. Есть
помехи, требования к которым более жесткие, чем к фазовым флуктуациям. Когда происходит передача по цифровым каналам сигналов
телевидения из-за временных флуктуаций, возникают размытости границ
отдельных деталей изображения и само искажение границ. При передаче цветных телевизионных сигналов наличие
фазовых флуктуаций вызовет изменение фазы цветовых несущих, что приведет к
искажению цвета (6,6 МГц– ширина
спектра ТV-сигнала) и отдельных участков изображения.
При нормальном законе распределения, при ширине спектра фазовых флуктуаций до 0, 6 МГц, среднеквадратичное значение фазовой флуктуации не должно превышать 0,5нс, что является гораздо более жестким требованием, по сравнению с требованием к фазовым флуктуациям в телевизионном канале. Это
обстоятельство делает обязательным исполнения в линейных трактах, обеспечивающих передачу цветного
телевидения, устройств подавления фазовых флуктуаций. Для того, чтобы уменьшить фазовую флуктуацию, вносимую контуром, следует уменьшать его расстройку и добротность. На практике добротность контура выбирается в пределах
80–120. Относительная расстройка контура оказывается менее 10-4.
11 Лекция №23. Помехи в
цифровом линейном тракте
Цель лекции: рассмотрение
принципов передачи цифровых сигналов по линейному тракту и способов устранения
помех, проникающих в линию.
Основными видами помех
в ЦЛТ являются: межсимвольные, собственные, переходные (в несогласованности входных и выходных R на участках регенерации), помехи от устройств коммутации приборов АТС, индустриальные помехи.
Межсимвольные помехи вызваны ограничением полосы
пропускания линейного тракта. В том случае,
когда ограничение осуществляется сверху, то растет затухание с ростом
частоты. Высокочастотные составляющие спектра претерпевают значительные
изменения, а на временной характеристике ВЧ составляющие «рисуют» фронт импульса. Когда высшие
гармоники не проходят через тракт, идет затягивание фронта.
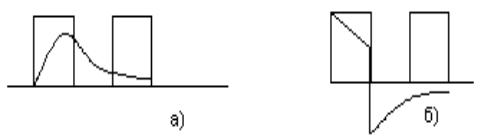
Рисунок
23.1 а) межсимвольные помехи при ограничении полосы сверху;
б)
межсимвольные помехи при ограничении полосы снизу
Ограничение полосы снизу также вызывает появление
межсимвольной помехи. В нижней гармонике спектра составляющие
«рисуют» не фронт, а вершину импульса. Если эти гармонические составляющие не проходят через тракт, происходит искажение плоской вершиной
(фронты при этом остаются). Ограничение полосы снизу происходит специально, чтобы иметь возможность осуществить питание
НРП по тем же самым сигнальным проводам, по которым осуществляется передача
информации. Когда частота среза снизу составляет примерно 1% от тактовой частоты fд, то уровень межсимвольной помехи составляет около 5% от
амплитуды импульса, и дополнительных мер путем формирования кода с оптимальным
для данной линии энергетическим спектром, а также за счет оптимального
выбора параметров регенератора (корректирующего усилителя и трансформатора) для
подавления помехи не требуется.
Переходные помехи
являются основным видом помех на местных и внутризоновых сетях,
где используются симметричные кабели, поэтому на таких сетях длина
регенерационного участка в основном определяется, исходя из усилителя, обеспечивая максимально допустимую защищенность от переходных помех. Переходные
помехи появляются вследствие наличия магнитных и емкостных связей между
парами кабеля. В случае однокабельной системы связи, когда передача сигналов в обоих направлениях ведется по
разным парам одного кабеля, наиболее сильным будет влияние на ближний конец, а если
используется двухкабельная система связи, т.е. каждое направление передачи ведется по
разным кабелям, то наиболее сильным будет влияние на дальний конец или влияние через третью сеть. Характер переходной помехи зависит от влияющих систем. При
малом числе влияющих систем (>4)
переходная помеха носит статический характер, суммируется по закону
суммирования случайных чисел с
мощностью сигнала.
В симметричных сетях уровень помехи зависит от длины
участка и частоты передаваемого сигнала. Со средним
увеличением частоты защищенность на дальнем конце уменьшается примерно на 6 Дб/октаву, а на ближнем – на 4дБ/окт.
Величина защищенности на ближнем конце однокабельной линии связи (ЛС) равна
Азо=Рпр-Рпо=Рпер-![]() l-Рпо=Азо-
l-Рпо=Азо-![]() l .
(23.1)
l .
(23.1)
Защищенность на дальнем конце для двухкабельной линии связи равна
Азl=Рпр-Рпl=Рпер-![]() l-Рпl=Азl-
l-Рпl=Азl-![]() l . (23.2)
l . (23.2)
При однокабельной системе связи (СС) величина Ао
ниже, чем Al, это означает, что требуемая защищенность Азо
будет обеспечиваться на меньшей длине l участка регенерации. Для
увеличения переходного затухания на ближнем конце используют пары кабелей,
расположенные в различных местах. Кроме того, при построении
однокабельной СС (рисунок
23.2) повысить защищенность на ближнем
конце можно за счет расположения регенераторов по длине трассы в разных
направлениях, в шахматном порядке. Повышение защищенности в этом случае
обеспечивается за счет того, что приемная станция (вход регенератора
противоположного направления) располагается не рядом с выходом передатчика, а
на середине длины участка регенерации, т.е. переходная помеха ослабляется
на l/2 раза, т.к. она вынуждена распрастраняться вдоль трассы.
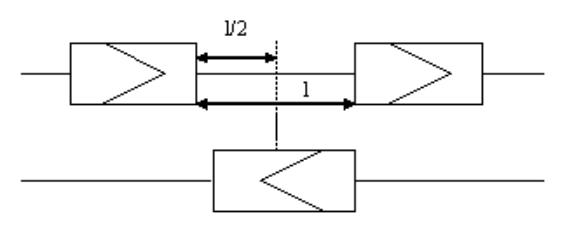
Рисунок
23.2 – Однокабельная СС
Данная схема удобна тем, что оборудование НРП разных
направлений располагается в разных колодцах. Колодец имеет V ограничений, в нем сложно расположить НРП обоих
направлений, поэтому оборудование НРП разных направлений располагается в разных колодцах. Величина переходной помехи также сильно зависит от
согласованности и симметричности входных и выходных цепей регенератов. Величина несогласованности и несимметричности на входе и
выходе регенератора должна быть не более 40дБ.
Помехи от устройств коммутации приборов АТС имеют импульсный характер и весьма опасны для ЦСП. Спектр
этих помех достаточно широк, и они состоят
из отдельных импульсов либо из
коротких пакетов импульсов большой амплитуды. Благодаря широкому спектру
эти помехи достаточно быстро затухают в линии и оказывают существенное влияние лишь на прилегающие к ГТС участки регенерации, которые рекомендуется выполнять укороченными.
Наличие несогласованностей в входных и выходных звеньях регенераторов вызовет
появление отраженных импульсов и
увеличение уровня помех.
Длина регенерационного участка ЦСП выбирается с учетом
всех видов помех и аппроксимированных искажений, и чтобы
вероятность появления ошибки в линейном тракте не превышала дополняемой величины 10-6. Если в линию включено n–регенераторов, то вероятность появления
ошибки на единственном регенераторе будет равна
P=10-6/n=10-6*l/L , (23.3)
где L–длина
линии;
l–длина регенерационного участка. Когда регенератор включается в коаксиальные цепи, уровень
переходных помех между состоящими цепями весьма мал, и длина участка регенерации будет определяться лишь
собственными шумами коаксиальных цепей и шумами входных цепей регенераторов. В общем случае длина регенерационного участка определяется, исходя из двух соображений: затуханием в ЛС, которое ведется по требуемой величине защищенности на входе
регенератора; искажением импульсного сигнала в линии, которое возникает из-за неравномерной АЧХ ЛС.
В элементах СС определяющим фактором длины линии является
затухание, т.к. величина его в электрических кабелях достаточно значительна, поэтому искажения в расчет не
берутся, ибо их доля низкая. А в ВОСП эти величины соизмеримы, обладают
малыми затуханиями, а величина искажений определяется за счет дисперсии. В этом
случае расчет длины ведется по критериям затухания и искажений, т.е. получают две длины регенерационного участка, из которых
выбирают меньшую. Для идеальных регенераторов вероятность появления ошибки
будет определяться вероятностью того, что выброс напряжения помех равен: kUn![]() Um(Ny-1), где Um–амплитуда пика откорректированного импульса; Ny–число уровней кода, на которых ведется
передача. Обычно полагают, что величина Um=Uom*10-0.05a(0.5ft), где a(0.5fT)– км-ое затухание в линии на полутактовой частоте; l–длина линии. В этом случае вероятность появления ошибки для одного регенератора равна
Um(Ny-1), где Um–амплитуда пика откорректированного импульса; Ny–число уровней кода, на которых ведется
передача. Обычно полагают, что величина Um=Uom*10-0.05a(0.5ft), где a(0.5fT)– км-ое затухание в линии на полутактовой частоте; l–длина линии. В этом случае вероятность появления ошибки для одного регенератора равна
P1=((Ny-1)/Ny)*(1-Ф(к)) , (23.4)
Ф(к)=(1/![]() )*
)*![]() exp(-x2/2s2)dx . (23.5)
exp(-x2/2s2)dx . (23.5)
Для квазитроичного кода следует учитывать, на какую посылку не приходится выброс напряжения шума,
если этот выброс пришелся на бестоковую ошибку, то появление ошибки неизбежно,
т.к. пороговое устройство определит его как импульс. А если
этот выброс и придется на токовую посылку, то здесь наличие ошибки будет
зависеть от совпадения знака выброса со знаком передаваемого символа. Если принять, что вероятность токовой посылки
равна 0,5, то вероятность появления ошибки будет определяться как 0,5+0,5*0,5=0,75. Поэтому для квазитроичного кода
величина равна
P1=0.5*(1-Ф(к)) (23.6)
Это уравнение решается графоаналитическим методом, откуда
оценивают длину регенерационного участка. Если построить зависимость
вероятности возникновения ошибки от
величины защищенности от помех на входе регенератора, то она будет иметь вид, показанный на рисунке 23.3.
Если Аз будет ниже определенного уровня, это
вызовет резкое увеличение вероятности появления ошибки. Такие графики
характерны для систем ЦЛТ, регенераторы которого обладают пороговым эффектом.
Величина защищенности в общем случае определяется по формуле
Аз=20lg(Uomax/Un)-a(0.5fд)l=20lg(Ny-1)k+Δa (23.7)
где Δа–запас по защищенности с учетом межсимвольных
помех и различных аппаратных искажений (Δа=4-6 дБ). В случае квазитроичного кода
20lg(Ny-1)k+Δa=20lg2k+Δa, (23.8)
где величину (20lg2k+Δa) принимают, равной 34дБ.
Для регенераторов, включаемых в цепь симметричных кабелей,
основным видом помех являются переходные помехи, соответственно, на ближнем
конце (однокабельный режим работы) или на дальнем конце (двухкабельный режим работы).
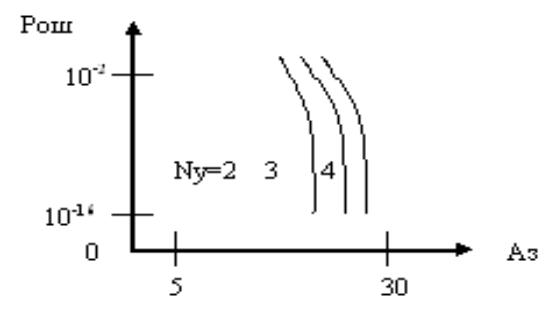
Рисунок
23.3 – Зависимость вероятности возникновения ошибки от величины защищенности от помех на входе регенератора
Если число влияющих пар невелико (2-4), то в этом случае можно считать, что суммирование помех
происходит по напряжению. Для обеспечения безопасной работы
регенераторов необходимо, чтобы амплитуда скорректированного импульса была не
менее, чем в 2 раза выше амплитуды помехи, что соответствует величине
защищенности от переходной помехи Ап![]() 6дБ. С учетом необходимых эксплуатационных запасов берут величину
защищенности порядка 15–20 дБ. Величина защищенности от переходной помехи равна Аз=Aol-al . (23.9)
6дБ. С учетом необходимых эксплуатационных запасов берут величину
защищенности порядка 15–20 дБ. Величина защищенности от переходной помехи равна Аз=Aol-al . (23.9)
Качество
линейного тракта. Длина участка регенерации
Качество линейного тракта ЦСП оценивают коэффицентом ошибки Кош или вероятностью ошибки Рош. Участком регенерации называют
участок линейного тракта, состоящий из регенератора и прилегающего к нему участка
физической цепи (среды распространения). Чем больше участок регенерации, тем больше накапливается ошибок, поэтому
результирующая вероятность ошибки растет.
Рош=![]() . (23.10)
. (23.10)
Рош ожидания определяется фактическим расположением регенераторов в линейном тракте и
характеристиками цепи (затухание шумами). Рош
дополнительно определяется нормами. При проектировании цифровой магистрали полагают, что Рош=10-6,
L=10 000км, поэтому Рош является дополнительной
вероятностью ошибки,
которая на 1 км линейного тракта равна 10-6/L=10-10 , а дополнительная вероятность ошибки участка регенерации к длине (l) будет определяться по формуле Рош доп=l*10-10.
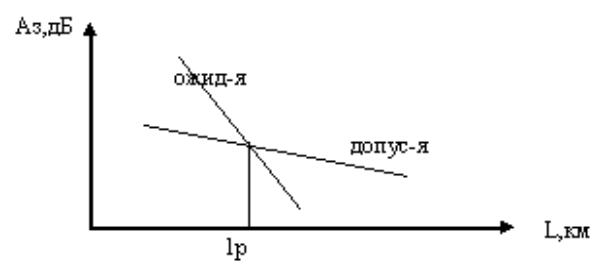
Рисунок
23.4 – Зависимость Адоп от L
Как видно из рисунка
23.4, Адоп почти не зависит от l, т.к. изменение l на порядок изменяет Адоп
на величину не более 0,5дБ, поэтому для дальнейших приближенных расчетов будет
полагаться, что Адоп=const=22дБ – это идеальный регенератор. В реальной схеме регенератора имеются внутренние шумы и
различные дестабилизирующие факторы, ухудшающие его работу. По этой причине величина Адоп реального
регенератора должна быть увеличена. Причины, по которым надо увеличить допустимую
защищенность, это остаточные шумы интерференции, которые являются следствием
неточной работы устройства коррекции АРУ; неоптимальная оценка символов
передаваемого сигнала; дрожание фазы тактовой частоты за счет влияния случайного
характера передаваемого сигнала и температурных нестабильностей на работу блока
ВТИ; нестабильность порока развязывающих
устройств регенератора; случайные отклонения параметров выходных импульсов в
формирующем устройстве регенератора.
Увеличение дополнительной защищенности реального
регенератора по сравнению с идеальным за счет перечисленных выше факторов
обозначается, как ΔАдоп>0, однако он зависит от принципов
построения основных узлов регенератора, схемных и конструктивных решений,
принятых в соответствующей разработке. Уменьшение ΔАдоп
улучшает качественные показатели регенератора, но увеличивает его стоимость.
Обычно ΔАдоп=3-10дБ. Ожидаемая защищенность Аож
определяется частотной характеристикой цепи Ац(t), требуемой частотной характеристикой тракта передачи и
шумами.
Цифровые СП, в отличие от СП с ЧРК, не чувствительны
к нелинейным искажениям. Поэтому в
линейных трактах ЦСП шумы нелинейных переходов не учитывают. Основными видами
шумов в линейных трактах кабельных ЦСП являются: для симметричного кабеля – собственные шумы и шумы линейных
переходов, для коаксиального кабеля – только
собственные шумы.
В ЦСП, работающих на ГТС, приходится учитывать импульсную
помеху. Эта помеха особенно сильна на крайних участках регенерации, прилегающих к АТС, т.к. мощным источником импульсных помех
являются шаговые искатели. Поэтому крайние участки обычно
делают короче остальных. Мощность сигнала Рс и
шумов Ршi зависит от длины участка регенерации l, поэтому ожидаемая защищенность – это прямая функция от l, т.е. Аож(l). Расчетную длину участка
регенерации можно определить из уравнения
Аож(l)=Адоп+ΔАдоп
. (23.11)
Формула
защищенности одночастотного сигнала от шумов равна:
Аож=Рс-Рош , (23.12)
где Рс–полезный сигнал.
Рс=Рпер-Ац , (23.13)
где Рпер–уровень передаваемого сигнала;
Ац–затухание
цепи на расчетной частоте f=0.5fT. При симметричном кабеле
Рш=Рпер-Алп+20lgn , (23.14)
Аож=Алп(f)-Ац(f)-20lgnц , (23.15)
где Алп–переходное затухание. Упрощенное уравнение будет следующим
Алп(f)-20lgnц-a(f)lp=Адоп+ΔАдоп , (23.16)
откуда lp=(Алп-20lgnц-(Адоп+ΔАдоп))/a (23.17)
Номинальная длина участка регенерации lн выбирается
с запасом несколько меньше lp, при этом lн=0.95lp, значение a приводится в справочной литературе, а Алп
определяется путем измерений.
![]() 4,55
4,55![]() +0,28f дБ/км – для кабельного типа МКС, (23.18)
+0,28f дБ/км – для кабельного типа МКС, (23.18)
a(f) ![]() 9
9 ![]() дБ/км – для кабельного типа КСПП = 1*4*0,9.
дБ/км – для кабельного типа КСПП = 1*4*0,9.
Ао(f)=70-15lgf (дБ), Al(f)=Ao+20дБ. Везде f=0.5fT (МГц)
Пример, в аппаратуре субпервичной ЦСП для сельской связи
«Зона-15» предполагается использовать два типа линейного тракта на кабеле
КСПП-1х4 по однокабельной системе (т.е. nц=1, Алп=Ао). Один цифровой тракт со скоростью В=1,024 Мбит/с;
другой со скоростью В= 2,048 Мбит/с. Пусть ΔАдоп=5дБ
для первого тракта СЦСП; f=0,5fT=0,5*1024МГц=0,512МГц; a=9![]() =6,44дБ/км; Ао=70-15*lg0,512=70-4.4=74,4дБ. Поэтому расчетная длина участка
регенерации равна lp=(74,4-(22+5))/6,44=7,36км. Номинальная длина участка выбирается с запасом (несколько меньше lp) lн=0,95lp=7км. Для второго тракта ПЦСП: f=0,5fT =0,5*2,048=1,024МГц; a=9
=6,44дБ/км; Ао=70-15*lg0,512=70-4.4=74,4дБ. Поэтому расчетная длина участка
регенерации равна lp=(74,4-(22+5))/6,44=7,36км. Номинальная длина участка выбирается с запасом (несколько меньше lp) lн=0,95lp=7км. Для второго тракта ПЦСП: f=0,5fT =0,5*2,048=1,024МГц; a=9![]() =9,1дБ/км; Ао=70-15lg1,024=69,8дБ. Поэтому расчетная длина участка
регенерации lp=(69,8-(22+5))/9,1=4,7 км. Спектр этой последовательности можно определить путём
выполнения преобразования Фурье:
=9,1дБ/км; Ао=70-15lg1,024=69,8дБ. Поэтому расчетная длина участка
регенерации lp=(69,8-(22+5))/9,1=4,7 км. Спектр этой последовательности можно определить путём
выполнения преобразования Фурье:
 ,
(23.19)
,
(23.19)
где S(n)–амплитуда отсчетов;
Еn–временное отключение n-го отсчёта; n–число отсчетов.
Полагая, что сигнал с данными спектральными составляющими
подаётся на ФНЧ, который включается на выходе декодера, и величина wEn на граничной частоте ФНЧ будет <<1, и
вычитается следующим образом
 , (23.20)
, (23.20)
(1)
(3) (2)
Таким образом, видно, что спектр сигнала при
наличии ФФ состоит из спектра самого сигнала (формула 23.20(1)) (дискретизация аналогового сигнала) и из составляющей, определяемой спектром и умноженной на стабильность (формула 23.20(2)). Последнее выражение показывает, что на выходе ФНЧ, помимо
самого аналогового сигнала, появляется дополнительный спектр (формула 23.20(3)). Это дополнительная часть спектра является источником
шумов и искажений, причина которых заключается в ФФ сигнала. ФФ состоят из шумов и переходных помех. Для уменьшения ФФ,
вносимых контуром, следует уменьшать его расстройку и добротность. Однако при
уменьшении добротности увеличивается влияние зоны нечувствительности (дрейф), а
это приведёт к неустойчивости работы ВТЧ. На практике добротность контура
выбирается в пределах 80-120. Полная
величина расстройки контура складывается из погрешности настройки при его
изготовлении и расстройки, связанной с изменением t-x режимов в условиях
эксплуатации. В целом относительная расстройка контура оказывается менее
10-4.
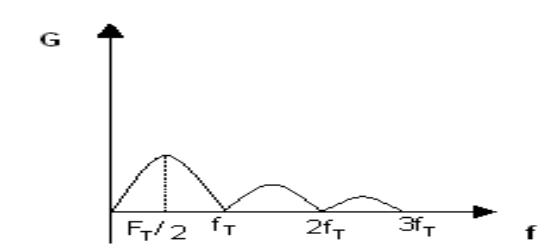
Рисунок 23.5 – Составляющие спектра выпрямленной последовательности
Если средняя частота полосы пропускания контура fo совпадает с fТ, т.е символов в исходной последовательности fТ, то в полосу пропускания контура попадают составляющие спектра выпрямленной
последовательности, симметричной относительно fТ и
практически с равными амплитудами. В этом случае фазовая модуляция
отсутствует. Зная спектральную плотность этих помех за счёт
фазовых флуктуаций, можно определить
величину защиты от этих помех на выходе фильтра нижних частот (ФНЧ). Расчёты показывают, что для величины защищенности, вызываемая помехами, от фазовых флуктуаций не менее 40дБ эффективное
значение флуктуации отсчётов на выходе цифро-аналоговых преобразователей (ЦАП) не должно превышать 810нс, т.е. для вторичной цифровой системы на
выходе ЦАП (ИКМ-120) (цифровой поток Е2). Данная величина
соответствует семи тактовым интервалам, и сама по себе эта величина является большой, т.к. смещение стробированных импульсов относительно
номинального будет определяться не долями тактового интервала, а единицами этих
интервалов.
12 Лекция №24. Плезиохронная цифровая
иерархия
Цель лекции: изучение ПЦИ:
организация, передаваемые потоки и способы
их объединения.
Многоканальные ЦСП используются на различных звеньях сети
подобно аналоговым системам с ЧРК и рассчитаны на разное
число каналов ТЧ и передачу различных сигналов. Для рационального построения ЦСП необходимо, чтобы
системы, рассчитанные на большее число каналов, были бы кратны числу систем с минимальным количеством
каналов. Это дает возможность строить многоканальные ЦСП с использованием стандартного
каналообразующего оборудования. В связи с чем ЦСП стандартизируются в
соответствии с цифровой иерархией этих систем. При выборе иерархии ЦСП учитываются следующие основные требования: стандартные скорости цифровых потоков должны выбираться с учетом возможности совместного использования
цифровых и аналоговых СП, а также электрических и оптических характеристик
существующих и перспективных направляющих систем; должно быть обеспечение
возможности синхронного и асинхронного объединения, разделения цифровых потоков, а
также транзит цифровых потоков и сигналов в цифровом виде.
В качестве первичной системы Международный союз электросвязи (МСЭ) рекомендует принять систему ИКМ-30 (E1), рассчитанную на передачу 30
каналов ТЧ при образовании 32 тайм-слотов (TS) во фрейме (цикле) и предназначенную для работы по симметричным электрическим кабелям в сетях
ГТС и пригородных сетях. Один из TS предназначен для передачи
сигналов синхронизации, а другой TS – для передачи сигналов управления и взаимодействия (СУВ). В системе ИКМ-30 предусмотрена дискретизация аналогового
сигнала с fд=8кГц (Tд=125мкс), в ней используется 8-разрядное кодирование. В этом случае цифровой поток Е1
будет иметь V=2048Мбит/с, а тактовая частота fT группового сигнала будет равна 2048 кГц. Кроме первичной системы Е1 (ИКМ-30), МСЭ допускает использование в качестве первичной системы
ИКМ-24, что соответствует северо-американскому стандарту, этот цифровой поток
называется DS1 (T1). Эта система имеет fT=1,544 МГц. В Европе в качестве первичной системы
выбрана система ИКМ-30 (двухмегабитный поток).
Для симметричных кабелей зоновой связи и ГТС предусмотрена
вторичная цифровая система ИКМ-120 с fд=8,448МГц, и соответственно скорость передачи информации будет равна 8,448 Мбит/с. Этот поток – вторичный цифровой поток E2. Вторичная цифровая система E2 формируется либо путем объединения четырех первичных систем E2=4*E1, либо путем объединения пяти 24-х канальных систем (5*DS1(T1)=E2). Вторичные системы могут использовать для радиорелейных, спутниковых
линий связи, а также для работы по малогабаритным коаксиальным или
ВОЛС. Возможны различные разновидности построения вторичной
системы: системы с непосредственным кодированием, обеспечивающим получение 120 каналов ТЧ по
системе ИКМ; системы с кодированием 60-канальной вторичной группы СП с
ЧРК в спектре частот 312–552 кГц и последующим объединением полученного цифрового
сигнала с одним цифровым потоком E1. В результате обеспечивается 90 каналов ТЧ. Для работы на
зоновых и магистральных сетях по коаксиальным и волоконно-оптическим кабелям
разработаны третичные и четверичные системы.
Третичная система ИКМ-480 рассчитана на цифровой поток с fд=34,368МГц, в которой обеспечивается V=34368Мбит/с (Е3). Цифровой сигнал этой системы
формируется путем объединения четырех вторичных систем (Е3=4*Е2). Предусмотрена разновидность ИКМ-480, в которой
производится непосредственное кодирование
300-канальной группы систем с ЧРК, лежащей в диапазоне частот
812–2048кГц. В этом случае образуется 300-й цифровой поток, к которому добавляется один цифровой поток Е2, т.е. организуются 420 каналов. Третичная система ИКМ-480
работает по малогабаритным коаксиальным, волоконно-оптическим, спутниковым и
радиорелейным линиям.
Четверичная система ИКМ-1920 получается путем объединения четырех третичных систем, и образуется общий цифровой поток с fд=139,246МГц, со
скоростью передачи информации V, равной 139,246 Мбит/с. Е4 (140- мегабитный цифровой поток) позволяет обеспечить до 1920 каналов ТЧ при
использовании кодирования ИКМ. По четверичным системам может быть
организована передача сигналов телевидения в цифровом виде с fд=114,48МГц, к которой может быть добавлен также 300-канальный сигнал СП с ЧРК. Система ИКМ-1920 работает по
коаксиальным и волоконно-оптическим кабелям.
Способы
объединения цифровых потоков
Задача объединения цифровых сигналов возникает при формировании сигнала в многоканальных ЦСП из цифровых потоков более низкого порядка, при
объединении различных сигналов, передаваемых в цифровом виде в единый
тракт различных сигналов от различных источников дискретной информации: по символьной (бит-интерливинг); по канальной (байт-интерливинг); по системной (фрейм-интерливинг или чередование циклов).
При бит-чередовании
(рисунок 24.1) берется из цифровых входных
потоков по символу, к которым добавляется синхросигнал группового цифрового канала объединенного
потока. В случае поканального объединения в групповой цифровой
поток включаются не символы из отдельных цифровых каналов (биты), а байты,
которые соответствуют каналам ТЧ. При посистемном чередовании в промежуток между синхросигналами группового
объединенного цифрового канала укладывается по очереди цикл (фреймы) сигналов
более низкого уровня.
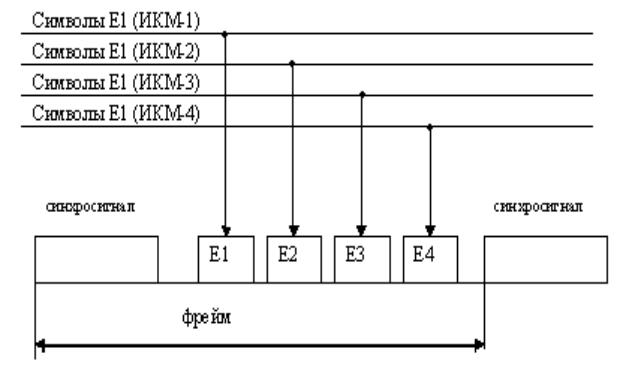
Рисунок
24.1– Структурная
схема бит-чередования
При этом длительность тактового интервала в групповом
объединенном канале будет примерно в 4 раза меньше, чем длительность тактового
интервала в объединяемых потоках более низкого уровня. Соотношение между частотами записи и считывания имеет
следующий вид: fсч=Nfз(1+n), где N–число
объединяемых потоков; n–дополнительные символы в
объединённом цифровом потоке, что используется для цикловой синхронизации передачи
дискретной и служебной информации. Реальная длительность канального
интервала будет еще немного меньше за счет того, что в цикл группового сигнала объединяемых потоков будут добавляться еще биты
служебной информации Е1=2048кбит/с, Е2=8448кбит/с. Объединение цифровых потоков может быть асинхронным,
плезиохронным и синхронным.
При
синхронном способе объединения все
цифровые потоки (ИКМ–1-4 групп)
синхронны от одного общего задающего генератора, а в блоках цифрового
сопряжения выставляются лишь необходимые интервалы времени между объединенными
потоками в соответствии с принятым способом объединения, т.е. в этом случае не
нужна синхронизация по фреймам в объединенном
цифровом потоке. Система, работающая в этом режиме, называется системой SDH – Synchron Digital Hierarchy.
При плезиохронном
способе, где (PDH) плезиохронными системами называются системы, в которых нет синхронизации от общего задающего генератора (ЗГ), расхождение в частотах максимальных синхронизаций отдельных потоков сравнительно невелико. Для таких
систем нестабильность частоты не более 10-5.
Асинхронное
объединение цифровых потоков, где расхождение в тактовой частоте fT объединяемых потоков
велико, и скорости объединяемых цифровых потоков устанавливаются в необходимые временные положения сигналов объединяемых потоков. В
этом случае для синхронизации передачи и приема по групповому тракту весь
групповой цифровой поток разбивается на циклы, и в начале каждого цикла
вводится цикловой синхросигнал. Блок цифрового сопряжения (БЦС) (рисунок 24.3) состоит из
записывающих устройств (ЗУ), где регистрируется определенная порция цифрового сигнала соответствующего потока. ГО передачи синхронизирует считывание информации из БЦС
соответствующего канала, которая поставляется в коллектор цифрового потока
(КЦП), где сигнал всех потоков
объединяется в общий групповой цифровой тракт для формирования цикла группового
цифрового потока, который вводится в групповой цифровой тракт. Но скорость записи порции информации цифрового потока
низкого уровня в БЦС и скорость информации цифрового потока сопряжения будут
различны (Vсчит в 4 раза
выше Vзаписи). На
приеме из группового потока выделяется fд, с помощью которой
синхронизируется работа ГО приема. Общий сигнал поступает на
распределитель цифровых потоков (РЦП), где из общего группового потока
приемника синхросигналов (СС) выделяется цикловой синхросигнал, к которому привязываются импульсы записи части группового
цифрового потока.
Считывание
информации из БЦС приемника будет производиться с другой fд, соответствующей fд цифрового
потока более низкого уровня. В циклах передачи ГЦП необходимо
передать, кроме информационных сигналов, и служебные сигналы (сигналы
синхронизации, контроля и т.д.). Ввиду наличия служебных сигналов скорость передачи ГЦП
больше суммарной скорости передачи объединяемых ЦП. В асинхронных системах,
благодаря отсутствию синхронизации цифровых поток более меньшего уровня и ГЦП, скорость записи и скорость считывания
несинхронны и могут быть различными. Для простоты понимания будем считать, что
скорость записи Vзап=Vсчит.
Из-за несоответствия Тзап и Тсчит
через конечное число импульсов считывания наступит момент, когда в считываемой
ячейке не будет создаваться информация. В этот момент будет появляться
нулевой символ, который называется также временным сдвигом. Количество
информационных символов между составляющими временными сдвигами будет
определятся, как
R=П(Тсч/(Тз-Тсч)) , (24.1)
где П–округление
до ближайшего целого. В синхронных системах это отношение всегда будет целым
числом, а интервалы между временными сдвигами считанной последовательности
будут постоянными. Такая последовательность называется однородной. В
асинхронных (плезиохронных) системах объединения из-за нестабильности fд будет дробным, и
его величина будет меняться во времени.
При появлении временных сдвигов (неоднородностей) нужно
производить согласование скорости передачи символов путем коррекции
соответствующих временных сдвигов. В зависимости от того меньше или
больше число считываемых символов, в передающем оборудовании из считанной
последовательности удаляется один тактовый интервал (ТИ) (1 символ), или вводится дополнительный ТИ для уравнения
скоростей, т.е. для уравнения скоростей записи и считывания система либо
исключает символы, либо вставляет недостающие. Информация об изъятых или
вставленных символах на приемный конец передается как служебная, где в соответствии
с этой информацией восстанавливается исходный цифровой сигнал. Если в считанную последовательность вводится дополнительное ТИ, то такое согласование скоростей называется
положительным, если из ЦП изымается ТИ, то – отрицательным.
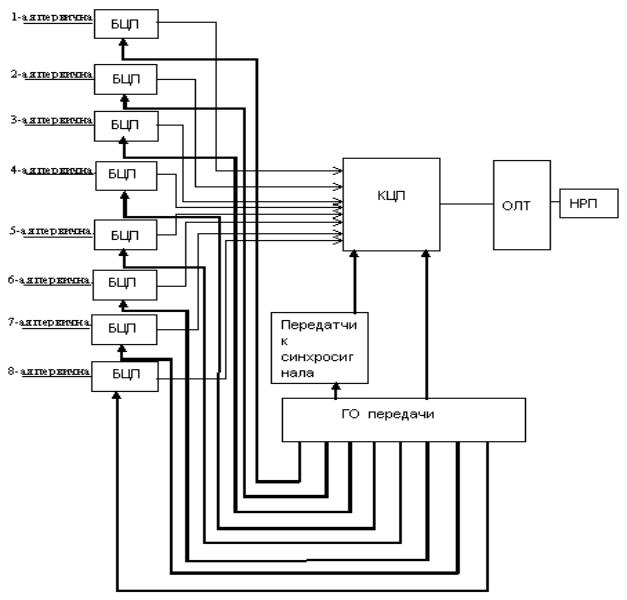
Рисунок 24.2 – Обобщенная структурная схема ЦСП передачи
Возможны также системы с двухсторонним положительным и
отрицательным согласованием скоростей. В этом случае по служебным каналам
необходимо передать информацию о введенных или изъятых импульсах, чтобы на приемном конце можно было их вставить или
исключить из ЦП.
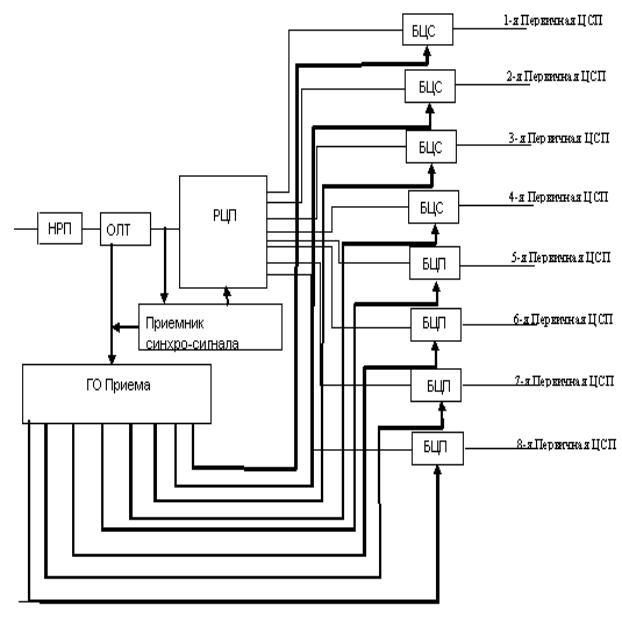
Рисунок 24.3 – Обобщенная
структурная схема ЦСП приема
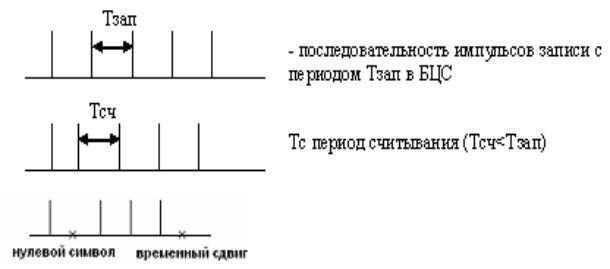
Рисунок
24.4 – Последовательности импульсов
Так как частота возникновения неоднородностей зависит от относительной нестабильности частот
записи и считывания, то для передачи команд согласования скоростей отдельных
каналов достаточно отводить не более 1% символов от общей пропускной
способности объединяемых каналов.
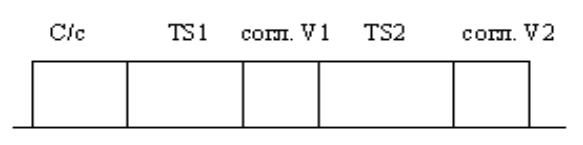
Рисунок
24.5 – Сигналы согласования скоростей
Асинхронное объединение цифровых потоков и согласование
скоростей передачи применяется при формировании сигнала вторичных, третичных,
четверичных и выше порядков, в этом случае используется система как с двухсторонним согласованием скоростей, так и с односторонним. При синхронном объединении временные сдвиги (возникновение) имеют постоянную частоту
следования. При асинхронном объединении период появления временных
сдвигов будет определяться
нестабильностью частот, и положение временных сдвигов нужно
корректировать. С этой целью при асинхронном сопряжении предусматривается
передача дополнительных служебных символов в виде сигналов согласования
скоростей.
Системы
передачи телевизионных сигналов по каналам СП с ИКМ
Спектр TV-сигнала при его стандартном разложении (625 строк)
ограничен полосой частот в 6 МГц. Во избежание заметных амплитудно-частотных искажений (АЧИ) и фазо-частотных
искажений (ФЧИ), обусловленных ФНЧ передающей аппаратурой, отводится специальная полоса частот на расфильтровку, и
частота дискретизации при этом выбирается fд=14МГц.
Квантование TV-сигнала приводит не только к шумам квантования, но и к
ступенчатому изменению яркости TV-сигнала, поэтому число уровней квантования выбирается
таким, чтобы отсутствие изменения яркости не было заметным на глаз. Можно
показать, что отсутствие заметных искажений требует числа уровней квантования
не менее 196, которое может обеспечиваться
8-разрядным кодом, т.к. 28=256. Функция кодирования должна быть нелинейной, чтобы во всем
диапазоне яркости TV-сигнала оставить постоянным отношение ΔB/B, где В–яркость TV-сигнала. ΔB/B=const. Наше ухо и глаз имеет логарифмическую яркостную
характеристику, и для обеспечения неравномерной шкалы квантования требуется
компандерное устройство на входе линейного кодера. Амплитудная характеристика компрессора выражается
Y=(ln(1+μ(Uвх/Uo)))/ln(1+μ) . (24.2)
Компрессоры, имеющие такую характеристику,
называются μ компрессорами (μ-
компандирование).
Акв

Рисунок
24.6 – Квантование
Для квантования TV-сигнала подходят компрессоры с μ=80-100. В этом случае имеем
возможность получить практически одинаковую помехозащищенность от шумов
квантования в достаточно большом
динамическом диапазоне, который в этом случае составляет 20lg(Uвхmin/Uвхmax) = (-40дБ). Выбор параметра расширения экспандера определяется с
учетом нелинейности кинескопа, и в точке расширения γ=2,2, а коэффициент
сжатия γсж=1/2,2. Аналогичная АЦП может выполняться не только с помощью компрессора, а также с помощью
трехсигментной нелинейности типа А5,36/3, у которой на 1-ом сегменте шаг
квантования Uвх/Uo![]() 0.25, т.е. шаг квантования в 2 раза меньше, чем шаг квантования
при равномерном квантовании.
0.25, т.е. шаг квантования в 2 раза меньше, чем шаг квантования
при равномерном квантовании.
Согласно требованиям МСЭ защищенность TV-сигнала от взвешивающих
флуктуационных помех для длины, меньшей 2500 км, должна быть <<57дБ. А если имеем невзвешенную флуктуационную помеху, то не менее 47,8дБ, что
вполне может обеспечиваться с помощью трехсегментной характеристики при числе
разрядов кода m=8, поэтому в наше время для передачи TV-сигналов используется 8-разрядное кодирование, частота дискретизации TV-сигнала выбрана равной fд=14,256МГц, а скорость передачи информации при этом будет равна 14,256*8=114,048Мбит/с. Кроме TV-сигнала, в состав ЦП Е-4 может
включаться 300-канальная группа СП с ЧРК, для которой требуется скорость
цифрового потока 28,512 Мбит/сек.
13 Лекция №25. Устройства
телемеханики (ТМ)
Цель лекции: рассмотрение
устройств телемеханики и телеконтроля.
Устройства ТМ входят в состав оборудования линейного тракта СП и
предназначаются для передачи из обслуживаемых
усилительных пунктов (ОУП) в необслуживаемые усилительные пункты (НУП) сигналов управления, а в обратном направлении для передачи из НУП в ОУП сигналов извещения. Сигналы управления используются для подключения генератора
испытательных сигналов, размещенных в НУП, к контролируемому линейному тракту.
Проверяются параметры линейного тракта между ОУП и НУП
участка телеобслуживания. Сигналы
извещения информируют технический персонал станции (ОП или ОУП) о положении
(нормальном или аварийном) датчиков
сигнализации НУП. Датчики
сигнализации бывают трех видов: датчики, контролирующие
состояние элементов и узлов оборудования НУП (токи и напряжение в цепях
местного и ДП, режим работы усилительных элементов, уровни контрольных частот
на выходе усилителя и т.д.); датчики, контролирующие состояние линии связи (например, для
кабельной линии связи –
давление газа в кабеле, утечку газа,
сопротивление изоляции сигнальных жил и т.д.); датчики, контролирующие помещение НУП (открыта или закрыта крышка
люка НУП, появление воды в помещении НУП и т.д.). Принятие
специальных мер в системе телемеханики дает возможность с их помощью определять
место обрыва кабеля. Кроме того, устройство
телемеханики может использоваться для второстепенных целей,
например, для вызова технического персонала
станций на служебную связь из помещения НУП. В системах телемеханики для передачи сигналов применяется
принцип многократного использования линии связи. При этом сигналы разделяются
по частоте и по времени. При НРП имеются: генератор
синусоидальных сигналов Г1,Г2…..Гn
и полосовые
фильтры (ПФ), на приеме
осуществляется разделение частот реле Р1,Р2….Рn, подключенные к выходам фильтров
через выпрямители В1,В2….Вn.
Разделение
сигналов по времени выполняется синхронно переключающимися распределителями РС1 и РС2. При этом последовательно во
времени, одна за другой, создаются цепи между ключами и реле для передачи отдельных сигналов (К1-Р1, К2-Р2 и т.д.) При ЧРК можно получить простую по схеме аппаратуру,
независимую передачу сигналов друг от друга, и
др. преимущества. Существует один недостаток: при
большом объеме информации практически трудно реализовать большое число
разночастотных генераторов и фильтров.
Система с временным разделением (ВР)
сигналов позволяет передавать большое количество информации, которое может быть
значительно увеличено простым добавлением полностью одинаковых ячеек. В таких
системах в любой момент времени передается лишь один сигнал, а это позволяет
при ограниченной мощности передачи улучшить соотношение сигнал/помеха. Недостаток системы с ВР сигналов: относительно
большое число общих узлов, повреждение которых приводит к повреждению всей
системы. Поэтому в системах телемеханики с ВР сигналов требуется применять
наиболее надежные элементы и оптимальное построение схемы общих узлов.
В системах ТМ
передачи (рисунок 25.2) сигналов осуществляются одинаковым способом и заключаются в формировании сигнала на передающем пункте трансляции
его по линии связи, приеме и расшифровке сигнала на приемном конце.

Рисунок 25.1 – Устройства
телемеханики
Сигнал
управления с дистанционным питанием (ДП), расположенном на оконечном пункте (ОП),
передается путем воздействия на
индивидуальный элемент управления (рисунок 25.2(1)), устройство
формирования и управления (рисунок 25.2 (2)) формирует
сигнал требуемого вида, который затем передается по тракту телеуправления на
исполнительный пункт (ИП),
расположенный в НУП. В ИП сигнал
принимается и расшифровывается устройством (рисунок 25.2(3)). После этого
сигнал поступает на индивидуальный блок (рисунок 25.2(4)) данного сигнала, который приводит в действие
исполнительное устройство (рисунок 25.2(5)). С помощью чего в
объекте управления может, например, включаться или выключаться какой-либо блок,
меняться программа и т.п. Все
изменения в оборудовании контролируемого объекта фиксируются датчиком (рисунок 25.2(6)) сигнализации и отличаются
срабатыванием соответствующих элементов сигнализации (рисунок 25.2(7)). Затем в
устройстве формирования сигналов извещения (рисунок 25.2(8)) формируется сигнал, который по тракту сигнализации
передается на диспетчерский пункт (ДП), где сигнал принимается, расшифровывается устройством (рисунок 25.2(9)) и поступает на исполнительный элемент (рисунок 25.2(10)) данного
сигнала, который включает местную сигнализацию (рисунок
25.2(11)) (лампочку
сигнализации).
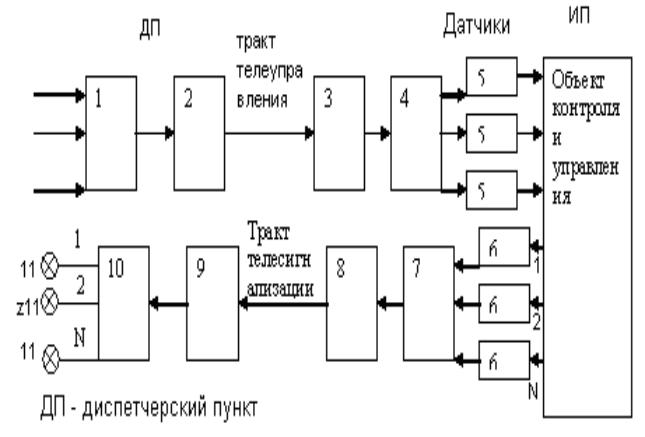
Рисунок 25.2 – Система
телемеханики
Все эти
работы реализуются при помощи следующих основных узлов: генератора
синусоидальных сигналов; ПФ; бесконтактных реле в ЧРК;
распределителей импульсов; генераторов
импульсов.
Устройство телеконтроля
В современных
системах передачи предусмотрена
возможность проведения периодического дистанционного контроля за прохождением
ВЧ сигналов по тракту и величиной нелинейных искажений усилителей НУП.
В линейном
тракте в процессе эксплуатации могут возникать различного рода неисправности,
приводящие к изменению диаграммы уровней линейного тракта. К таким повреждениям относятся: плохой контакт в высокочастотных разъемах НУП, неисправность термодатчика, нарушение пайки в усилительных блоках, обрыв цепи, повреждение
устройства АРУ и др. Большинство неисправностей
приводит к нарушению работы АРУ. Периодические
измерения и оценка нелинейных искажений усилителей также позволяют своевременно выявлять некоторые виды повреждений и не
допускать постепенных отказов по этому параметру. Периодический дистанционный
контроль осуществляется с помощью
устройства телеконтроля (ТК), например, с помощью аппаратуры К-300 (рисунок 25.3).
Контроль за
прохождением высокочастотных сигналов по линейному тракту заключается в том, что на вход усилителя
НУП на время измерений подключается генератор ТК. Генераторы ТК во всех НУП
вырабатывают частоту f1=1395кГц. Они включаются на время
измерений с помощью устройства телемеханики (ТМ) на любом НУП данной секции ОУП–ОУП. Уровень сигнала,
создаваемого генератором измерительно-контрольной частоты (ГИК) в линейном
тракте, измеряется на контролирующем ОУП с помощью избирательного указателя
уровня, настроенного на частоту ГИК.
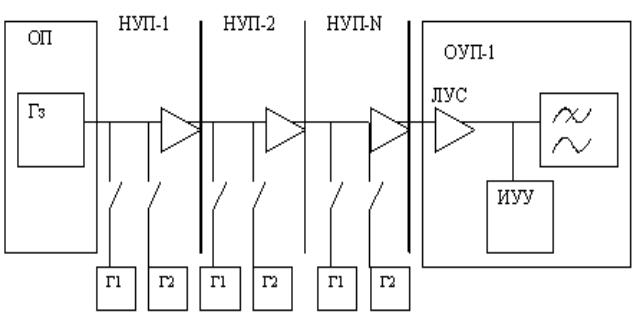
Рисунок 25.3 –
Аппаратура К-300
По
результатам измеренных уровней ГИК может быть определено место повреждения в
линейном тракте с точностью до одного усилительного участка. Для этого измерения уровня ГИК
сравниваются с предыдущими результатами измерений. Анализ над результатами измерений уровней ГИК позволяет определить,
что повреждение произошло на участке между входами усилителей тех НУП, с
которых приходят уровни генераторов контроля с наибольшим перепадом. При этом
повреждение может быть как в
кабеле, так и в усилителях. Метод обеспечивает проведение контроля и отыскание места повреждения без нарушения работы измеряемого
тракта. Это
достигается выбором измерительной частоты f1=1395кГц выше
рабочей полосы частот системы (60–1300) кГц и значительным снижением уровня телеконтроля по сравнению с уровнями рабочих частот системы
(-34,7дБ) на выходе линейного усилителя.
Список литературы
1.
Кирилов
В.И. Многоканальные системы передачи: Учебник. – М.:
Новое поколение, 2002.
2.
Баева Н.Н.,
Гордиенко В.Н. Многоканальные системы передачи: Учебник для вузов. – М.:
Радио и связь, 1997.
3. Галкин В.А., Григорьев Ю.А.
Телекоммуникации и сети. – М.: МГТУ им. Баумана Н.Э., 2003.
4. Телекоммуникационные системы и
сети. Под ред. В.П.Шувалова:Учебное пособие. –т.1. – М.:
Горячая линия-Телеком, 2003.
5. Гаранин М.В., Журавлев В.И. и др.
Системы и сети передачи информации. – М.: Радио и связь, 2001.
6. Иванов В.И. Гордиенко В.Н., Попов
Г.Н. и др. Цифровые и аналоговые системы передачи. – М.:
Радио и связь. 1995.
7.
Баева Н.Н.,
Гордиенко В.Н., Тверецкий М.С. Проектирование цифровых каналов передачи:
Учебное пособие. – М.: МТУСИ, 1996.
8.
Берганов
И.Р., Гордиенко В.Н., Крухмалев В.В. Проектирование и техническая эксплуатация
систем передачи. – М.: Радио и связь, 1989.
9.
Левин Л.С.,
Плоткин М.А. Цифровые системы передачи информации. – М.:
Радио и связь, 1982.
10.
Зингеренко
А.М., Баева Н.Н., Тверецкий М.С. Системы многоканальной связи. – М.:
Связь, 1980.
11.
Четкин С.В. Методические указания и задания
на курсовой проект «Цифровая многоканальная система передачи с ИКМ». – М.:
МИС, 1991.
12.
Иванов Ю.П.
и др. Унифицированное каналообразующее оборудование для цифровых систем
передачи. – М.: Средства связи, 1985.
13.
Баева Н.Н.
Многоканальная электросвязь и РРЛ: Учебник для вузов. – М.:
Радио и связь, 1988.
14.
Голубев
А.Н., Иванов Ю.П., Левин Л.С. Аппаратура ИКМ-120. –
М.:Радио и связь, 1988.
15.
Цифровые и
аналоговые СП. Под ред. В.И.Иванова.– М.: Горячая линия, 2003.
16.
Галкин В.А., Григорьев Ю.А. Телекоммуникации и сети. – М.:
МГТУ им. Баумана Н.Э., 2003.
17.
Гордиенко
В.Н., Крухмалев В.В. Проектирование и техническая эксплуатация СП: Учебное
пособие для вузов. – М.: Радио и связь, 1996.
Доп. план
2005г., поз. 10
Бактыхан Байбориевна Агатаева
МНОГОКАНАЛЬНЫЕ ТЕЛЕКОММУНИКАЦИОННЫЕ
СИСТЕМЫ СВЯЗИ
ЧАСТЬ2
Конспект лекций
(для студентов всех форм обучения
специальностей
380240-Многоканальные
телекоммуникационные системы,
050719-Радиотехника, электроника и
телекоммуникации)
Редактор
Ж.М.Сыздыкова
Подписано в
печать __ __ __
Формат 60х84 1/16
Тираж 100 экз. Бумага
типографская №1
Объем
уч.-изд.л.
Заказ______Цена____тенге
Копировально-множительное бюро
Алматинского института энергетики и
связи
050013, г.Алматы, ул. Байтурсынова,
126