ҚАЗАҚСТАН РЕСПУБЛИКАСЫНЫҢ
БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ
С. В. Коньшин, Н.А. Джунусов
ЖЕРСЕРІКТЕРДІҢ ОРБИТАДА ҚОЗҒАЛУЫНЫҢ ТЕОРИяЛЫҚ НЕГІЗДЕРІ
Оқу құралы
Алматы 2011
УДК 52 (075.8)
ББК 22.654я73
Ж54 Жерсеріктердің орбитада қозғалуының теориялық негіздері:
Оқу құралы / C.В. Коньшин, Н.А. Джунусов
АУЭС. Алматы, 2010 – 80бет.
ISBN 978-601-7098-93-3
Оқу құралы ғарыштық аппараттардың орбитада және гравитациялық күштер өрісінде қозғалуының теориялық негіздеріне арналған және аэроғарыштық пәндерді оқу кезінде қажет. Оқу құралында ғарыштық аппараттардың ауытқымалы және ауытқымалы емес қозғалуларының теориясының жалпы жағдайларымен қатар орбиталдық әрекеттер және жақындасулар кезіндегі шығару аумағындағы ұшу динамикасы сияқты жасанды жер серіктерінің қозғалуының теориялық негіздері қарастырылады.
Оқу құралы аэроғарыштық бағыттағы мамандықтар бойынша және бакалавр және магистрларды дайындайтын "Радиотехника, электроника және телекоммуникация" мамандықтарда ғарыштық байланыстың жеке сұрақтарын зерттеу кезінде барлық оқу түрінде оқитын студенттерге арналған.
Кесте 1. Без. 66. Әдеб. көрсеткіші – 14 атау.
ББК 22.654я73
ПІКІР БЕРУШІЛЕР: КП НТО РЭС, техн.ғыл.канд, доц. Сартбаев А.Д.
АУЭС, техн.ғыл.канд, проф. Қазиева Ғ.С.
Қазақстан Республикасының Білім және Ғылым Министрлігінің баспа жоспары бойынша 2010 ж-ға басып шығарылды.
ISBN 978-601-7098-93-3
© «Алматы энергетика және байланыс университеті» КЕАҚ, 2011 ж.
Мазмұны
1 Жерсеріктік байланыс жүйелерінің дамуы және хабарлау
1.1 Байланыс жерсеріктерінің ерекшеліктері
1.2 Жерсеріктік жүйелердің дамуына тарихи шолу
2.1 Жерсеріктік байланыс орбиталары, жерсеріктерді орбитаға шығару әдістері
2.2 Жерсерікті орбитаға шығару
2.3 Жерсеріктерді тұрақтандыру
3 ҒА ауытқымалы емес қозғалысы
3.7 Шеңберлік, параболалық және гиперболалық орбиталар
3.8 Геоцентрлік орбитаның элементтері
4.1 ҒА-тың ауытқымалы қозғалысын зерттеудің негізгі әдістері
4.2 Оскулирлейтін элементтердің әдісі
4.3 Ауытқымалы күштер әсерінен орбита элементтерінің өзгеруі
4.4 Оскулирлейтін элементтер теңдеулері
4.5 Ауытқымалылық әсерінен орбиталды жылдамдық құраушысының өзгерісінің теңдеулері
4.6 Жердің гравитациялық өрісінде ҒА-тың ауытқымалы қозғалысы
4.7 ҒА қозғлысына Жер атмосферасының әсері. ҒА-өмір сүру уақыты
5.1 Орбита элементтерін түзетудің импульстік маневрі
5.2 Орбиталды ауысу маневрлері
1 Жерсеріктік байланыс жүйелерінің дамуы және хабарлау
1.1 Байланыс жерсеріктерінің ерекшеліктері
Байланыс жерсеріктерінің ерекшеліктеріне, дәстүрлі континентаралық байланыс жүйелерінің жолағынан көп болатын, кең жиіліктер жолағы жатады. Жоғары сапалы ТД бейнелерін ӨЖЖ радиорелелік және кәбілдік байланыс жолдарымен тарату бұрыннан мүмкін болғандықтан, ТД бағдарламаларды трансатланттық тарату ең алғаш орбитаға бірінші активті байланыс жерсерігін шығарғаннан кейін жүзеге асты. Ең маңызды ерекшелік – жерсеріктік байланыс әлемдік байланысты жүзеге асыруға мүмкіндік береді. Оптиканың (оптоталшықты) дамуымен АЖЖ байланыс мүмкін болды. Бірақ кәбілде әрқашан екі қатты қыстырылған соңы бар және байланыс орнатылатын пункттер, бір-бірімен физикалық түрде қосылу керек. Жерсеріктік байланыс үшін мұндай талап жоқ. Жерсеріктік жүйелердің ыңғайлығы тек жердегі тұрақты пункттер арасында ғана емес, сонымен қатар қозғалмалы объектілер (кемелер, ұшақтар, ғарыштық кемелер) арасында байланысты қамтамасыз еткенде байқалады.
1.2 Жерсеріктік жүйелердің дамуына тарихи шолу
Жерсеріктік байланыстың бастау идеялары белгісіз. Бірақ синхрондық немесе геостационарлық жерсерік идеясын Артур Кларк ұсынған. Ол геостационарлық орбиталарды ЖМ – хабарларды таратуға қолдануды ұсынды. Кларк ғарышта күн батареяларынан алынатын электрлік энергияның қолдануын білген. Ойдың іске асуы тек ғарыштық эраның келуімен, яғни 1957 жылы қазанда КСРО-да бірінші ЖЖС жіберуден кейін мүмкін болды.
Ғарыштық радиобайланыс Жер орбитасына ең алғаш ЖЖС шығарудан бұрын пайда болған. Бұл пассивті радиобайланыс болды, яғни қандай да бір бөгеттерден сәуле түсулерді радиотолқындардың қабылданды. Ең қол жетерлік сәуле түсіргіш Ай болып табылады. Айдан радиолокациялық сәуле түсулерді қабылдау мүмкіндігі және оларды байланыс орнатуға қолдану мүмкіндігі 40-ші және 50-ші жылдардың соңында бірнеше рет көрсетілген.
Келесіде жерсеріктік жүйелердің дамуының кейбір уақыттары келтірілген.
1954 ж. шілде - АҚШ ӘТК (ВМС) ең алғаш Жер - Ай – Жер жолы бойынша телефондық хабарламаларды таратуды жүзеге асырды.
1956 ж. – Вашингтон мен Гавай аралдары арасында Айды пассивтік ретранслятор ретінде қолданып, байланыс орнатылды. Желі 1962 ж. дейін жұмыс істеді және қабылдау және тарату пунктерінен Айдың тек біруақытылы көріну жағдайымен шектелетін, алыс қашықтықта сенімді байланысты қамтамасыз етті (Ртаратқыш=100 кВт, f = 430 МГц, Dа =26 м).
ЭМТ шашырататын пассивті ретранслятор ретінде, орбитаға ракетамен шығарылған металданған шар қолданылды.
1960 ж. тамыз айының басында ЕСНО жерсерігінің көмегімен ең алғаш f = 960 және 2290 МГц Калифорния (Голдстон қ.) және Нью-Джерси (Хоумдел қ.) штаттары арасында байланыс орнатылды. Жерсерік – иілмелі орбитамен 1500 км биіктікте айналатын шар екенін көреміз.
Пассивті жерсерік көмегімен көпстанционды қатынас арқылы байланысты қамтамасыз ету мүмкіндігі шексіз болғанымен, мұндай байланыс жүйелерінің айтарлықтай кемшілігі сәуле шығарғыш қуатты тиімсіз қолдануы болып табылады. ЕСНО тәжірибесінде таратылатын қуаттың тек 10-18 бөлігі қабылдағыш антеннаға қайтып келеді. Сигнал түрлі себептерден туған шуылдардан бұзылмас үшін арнайы аз шуылды қабылдағыштар керек. Пассивті жерсеріктердің артықшылығы: күрделі қазіргі заманғы борттық аппаратураның қажет еместігінде. Жерсерікті бақылау үшін онда радиомаяктық таратқыштың орнатылуы қажет болуы мүмкін, бірақ та жалпы жағдайда, күрделі қазіргі заманғы аппаратура да кеңістіктегі қалыпты тұрақтандыру аппаратурасы да қажет емес (сфералық жерсерік үшін).
Қарапайымдылығы және 50-ші жылдарда қазіргі заманғы ғарыштық аппаратура болмағандықтан пассивті жүйелер көп қолданысқа ие болады.
Пассивті жүйелердің кемшіліктері активті жерсеріктердің пайда болуымен байқала бастады, әсіресе бортта қуатты өндіру мүмкіншілігінің пайда болуымен. Активті жерсеріктердің сигнал қуатының азаюы R2-ге кері пропорционал, мұндағы R – жер станциясынан жерсерікке дейінгі ара қашықтық, (пассивті үшін - радиолокациялық сәуле түсіру кезіндегідей қуат R4-ге пропорционал азаяды) – активті жерсеріктер пайдасына шешуші фактор.
Ең алғаш адам дауысы ғарыштан 1958 ж. "Скор" жерсерігінен жіберілді, ол бортта президент Эйзенхауэрдің жаңа жылдық жолдамасының магнитофондық жазбасы болды. Жазушы аппаратура ақпаратты келесі тарату үшін жинауға мүмкіндік берді - бұл баяу әсер ететін ретрансляторлар. "Курьер-18" (1960 ж.) әскери жерсерігі ақпаратты жинап, 68000 сөз/мин жылдамдықпен таратты. Онда күндік элементтер қолданылды. "Скор" жерсерігінде – гальваникалық элементтер. Егерде алғашқы "Спутник", Explorer сияқты ғарыштық зондтарды және Courier жобасы бойынша жіберілген жерсеріктерді санамасақ (бұл хабарламаны жазып, сосын ретрансляциялауды қолданатын алғашқы байланыс жерсеріктері болған), онда активті ЖЖС негізіндегі жерсеріктік байланыстың тәжірибелік кезеңдерінің негізгі бөлігін Telstar жобасы қалады. Бұл жоба АТ&Т және Bell Laboratories фирмасымен ЕСНО пассивті жерсерігі жайындағы деректер негізінде басталды.
Ең алғаш Telstar жерсерігі ( 87 см диаметрлі шар m=80 кг) Каннаверал мүйісінен 10 шілде 1962 ж. жіберілді. Ол эллиптикалық орбита бойынша 5600 км апогеймен және 2,5 сағ айналу периодымен Жерді айналды. Ең алғашқы телетаратуда, желде желбіреп тұрған америкалық жалау, Великобритания, Франция және АҚШ-тағы Нью – Джерси стансасына, жерсеріктің жіберілуінен 15 сағ өткеннен кейін көрсетілді. Ғалымдар радиацияның күндік элементтерге кері әсерін көрді.
Радиацияға жоғары тұрақтылықты Telstar 2 ЖЖС 1969 ж. мамырында жіберілді. Telstar 1 және Telstar 2 жерсеріктерінің қуаты 2,25 Вт құрады. Бұл қуат ҚТШ-мен қамтамасыз етілді (f = 6 және 4 ГГц-те ЖЖ бойынша жолақ ені 50 МГц ). Екі жерсерік те айналумен тұрақтандырылды. Жалпы өткізу қабілеті 600 телефондық арна немесе бір ТД арна. Жерсерік – Жер аймағында тасушы деңгейінің шуыл деңгейіне қатынасы төмен болып қалғандықтан, жер стансаларының қабылдағыштарында шектің төмендеуін қамтамасыз ететін, жиілік бойынша кері байланыс қолданылды. Бұл жүйелер коммерциялық емес тәжірибелік болған.
26 шілдеде 1963 ж. Атлант мұхитының үстінен геостационарлық орбитаға "Синком-2"жерсерігі шығарылды."Синком-1"-де аппаратура істен шықты.
20 тамызда 1964 ж. - 11 мемлекет келісімшартқа қол қойды, соның негізінде INTELSAT атымен белгілі, жерсеріктік байланыстың халықаралық консорциумы құрылды. Бұл ұйымның нысанына жерсеріктерді ойластыру, жобалау, жасау, іске қосу және орбитада эксплуатациялау, ғаламдық коммерциялық жерсеріктік байланыс жүйесін басқару және шығару құралдарын жасау кірді.
Жерсеріктерді қолданған коммерциялық байланыс 1965 ж. сәуірінде, Кеннеди космодромынан өткізу қабілеттігі 240 телефондық линиялы (Early Bird) әлемдегі ең алғашқы INTELSAT 1 коммерциялық байланыс жерсерігі жіберілгенде ашылды. Ол 1969 ж. қаңтарда INTELSAT-2 және 3-сериялы жерсеріктері Атлант және Тынық мұхит аудандарын байланыспен жабуды іске асырғанда жұмыс істеуін тоқтатты. Early Bird–ті 1.5 жылда эксплуатациялау ойластырылды, бірақ эксплуатация 100% сенімділікпен 4 жылға созылды.
1 телефондық линияға қызмет көрсету 30000$-дан (INTELSAT-1) 2000$-ға дейін түсіп кетті (INTELSAT-3 1500 телефондық линиға қызмет көрсетті). INTELSAT-1 мен 2-де бағытталмаған антенналар болды, бұл сигналдың көп бөлігінің жоғалуына алып келді. INTELSAT-3-те антенна рупоры бұрылу негізінде орнатылған эллиптикалық сәуле түсіргішке бағытталған болды, осылайша сәулелену тек Жерге бағытталған болды.
1971 ж. INTELSAT-4 жерсерігі қолданысқа енгізілді. 730 кг салмақты жерсерік көріну аймағындағы бүкіл аумақты жабуды қамтамасыз етумен қатар, онда бас жапырақшаның ені 4° 2 тар сәулесі болды, олар таңдау бойынша Европа, Солтүстік және Оңтүстік Американы жабу үшін қолдануы мүмкін болды. INTELSAT-4 – бұл айналумен тұрақтандырылған жерсерік, бірақ оның 13 антеннадан тұратын антенналық жүйесі кері бағытта айналады, сондықтан ол әрқашан Жерге бағытталған болып қалады. Тар сәулелер екі үлкен параболалық антенна негізінде құрылды. Әрбір жерсерік 6000 телефондық арнадан кем емес таратуды қамтамасыз етті. INTELSAT 4 сонымен қатар біруақытта 12 түрлі түсті ТД бағдарламаларды таратуға мүмкіндік берді. 1 линияның қызмет көрсету бағасы 1000$ құрады.
1980 ж. - INTELSAT-5 - 12000 телефондық арналар + 2 арна түрлі түсті ТВ. 6/4 ГГц диапазонында және 14/11 ГГц жаңа диапазонда жұмыс істеді.
Советтік жүйелер.
1965 ж. "Молния" сериясы жіберілді – ең үлкен жерсеріктік байланыс жүйесі. Жерсеріктер апогей нүктесі Солтүстік жартышарда (12-сағаттық орбита) орналасқан айқын шығып тұрған эллиптикалық орбиталары болды. Телефондық және телеграфтық байланыс, ақ-қара түсті ТД бағдарламаларды тарату қамтамасыз етілді. Әрбір серияда ("Молния-1 және 2") бір-бірінен 90° бұрыштық қашықтықтағы орбитада айналатын 4 жерсерік жұбы болды. Жұмыстық жиіліктер диапазоны 800-1000 МГц.
1974 ж. "Молния-3" – түрлі түсті ТД, диапазоны 4-6 ГГц."Молния" жерсеріктер негізінде "Орбита" алыс қашықтықтағы ғарыштық байланыс жүйесі құрылды.
1975 ж. желтоқсан - геостационарлық орбитадағы "Радуга" жерсерігі (халықаралық аты "Стационар-1") және "Экран" ("Стационар-Т").
1978 ж. желтоқсан - "Горизонт"геостационарлық жерсерігі.
2 Жерсерікті орбитаға шығару
2.1 Жерсеріктік байланыс орбиталары, жерсеріктерді орбитаға шығару әдістері
Иілу бұрышы бойынша (орбита жазықтығы мен экватора жазықтығы арасындағы бұрыш a) орбиталарды келесі типтерге бөледі:
- экваториалдық (a=0°);
- полярлық (a=90°);
- иілгіш (0°<a<90°).
Орбита формасы бойынша:
- эллиптикалық (эксцентриситеті 0<е<1);
- дөңгелек (е=0).
Орбита биіктігі бойынша:
- төмен (h=150-5000 км) аз айналу периодымен (1-3 сағат);
- жоғары (h>5000 км) көп айналу периодымен.
Егерде байланыс сеансы тәуліктің бірдей уақытында қайталану керек болса, айналу периоды тәулік ұзақтығын бүтін санға бөлуге тең болатын, синхронды және субсинхронды орбиталар қолданылады. Егерде бір ЖЖС тәулік бойы байланысты қамтамасыз ете алмаса, онда орбитадағы орны бойынша ығыстырылған бірнеше ЖЖС қолданылады.
Периоды 24 сағат орбита стационарлы деп аталады, егер ЖЖС a=0°-мен Жердің айналу бағытында қозғалса синхронды деп аталады (Жерсерік Жерге қатысты тұрақты).
Жартылай стационарлы тұрақты орбита - иілу бұрышы 63,5° айналу периоды 24 сағат (жерге проекциясы - қайталанатын сегіздіктер).
Кеплердің 2-ші заңына сәйкес жерсеріктің радиус-векторы бірдей уақыт аралықтарында бірдей аудандарды сипаттайды. Сондықтан ЖЖС-ның жоғары биіктіктегі (апогейде) жылдамдығы баяулайды, ал перигейде жылдам болады.
Төмен орбиталар. Тікелей мобильді тасымал радиотелефондарға байланысты қамтамасыз ету үшін қолданады.
Артықшылықтары: жерсерікті орбитаға шығару қарапайымдылығы (аз шығындар); сигналдың аз өшулігі (әлсіреуі).
Кемшіліктері:
- аз биіктіктерде Жердің магниттік өрісінде қатысты үлкен кернеулік болады және Ван – Алленнің радиациялық белдеулерін туғызатын, жоғарғы энергиялы протондарды қамтиды. Олармен жерсеріктің қозғалуы кезінде радиация деңгейі соншалықты жоғары, күндік элементтер мен басқа да жартылайөткізгіш құралдар тез істен шығады. Қорғану жабынуларын қолданады немесе бұлардан да тұрақты құралдар қолданады, бұлар жүйенің сипаттамаларын нашарлатады;
- жердің магнит өрісі тоқтасушы өткізгіштер өрісімен және айналумен тұрақталынатын жерсерік қабықшасымен өзара әсерлеседі, бұл оның айналу жылдамдығын баяулатады. Жерсерік траекториясын периодты түрде коррекциялау қажет, бұл ЖЖС бортындағы жанармай көлемін көбейтуге әкеліп соқтырады;
- жерсерік уақыттың көп бөлігін Жердің көлеңкесінде өткізеді, бұл аккумуляторлар сыйымдылығының өсуіне және күндік батареялар санының өсуіне алып келеді. Күнде болған уақытта оларды зарядтап алу үшін;
- тәулік бойы байланысты қамтамасыз ету үшін бірнеше жерсерікті қолдану қажеттілігі;
- жерсерікті бақылаудың күрделі жүйесі.
Жерсеріктің айналу периоды
![]() теңдеуімен
анықталады, мұндағы А – эллипстің басты (үлкен)
жарты осінің шамасы; G – гравитациялық тұрақты (
теңдеуімен
анықталады, мұндағы А – эллипстің басты (үлкен)
жарты осінің шамасы; G – гравитациялық тұрақты (![]() км3/с2).
км3/с2).
Жерсеріктің дөңгелек орбита бойынша Жердің айналу периодына тең периодпен айналуы (сидерикалық тәуліктердің ұзақтығы 23 с 56 мин 4,09 с), жерсерікті 35800 км биіктікке шығаруды талап етеді. Экваториалдық жазықтықта мұндай жерсерік Жердегі кез келген нүктеге байланысты тұрақты болады (геостационарлық жерсерік). Басқа жазықтарда осы биіктікте ол әрбір тәулікте Жерге қатысты сегіздіктерді бейнелейді.
Геостационарлық жерсерік келесі қасиеттерге ие: жер стансасы бір жерсеріктен басқа жерсерікке байланысқа ауысу қажеттілігінсіз (стационарсыз жерсеріктер кезінде), бір немесе бірнеше (көпсәулелі антенна кезінде) жерсеріктермен жұмыс істеуі мүмкін. Сәйкес түрде орналасқан үш жерсерік бүкіл Жерді қамти алады.
Кемшіліктері: жерсерікті мұндай орбитаға шығару қиындығы; полярлық аудандарды қамту қамтамасыз етіледі.
Жер шарының халық көп орналасқан аудандары көп бөлігімен геостационарлық жерсеріктер аумағында орналасқан. Сондықтан бұл аудандарды қамту үшін жоғары және орта орбиталарды қолдану талап етіледі. Жоғары ендіктегі байланысты қолдау деректерді жинау және әскери байланыс үшін қажет. Орта биіктіктегі полярлық орбиталарға одан да көп пайдалы жүктемені шығаруға болады.
Жоғары орбита-"Молния" (ССРО) жерсерігінің орбитасы, мемлекетшілік байланыс үшін қолданылады. Бұл орбита пайдалы жүктемесіз Алыс Солтүстік аудандарды қамтуға мүмкіндік береді. "Молния" жерсерігі айналу периоды 12 cағ және солтүстік жартышардағы апогейі 40000 км, перигейі 500км, өте шығыныңқы эллиптикалық орбитаға ие.
Әдетте апсид деп аталынатын, кез келген эллиптикалық орбитаның бас осі, Жердің сфералық еместігінен баяу айналулар жасайды (полюстердің "қысқалығынан"). Орбитаның иілу бұрышының белгілі бір мәнінде (шамамен 62°) бұл эффект жоғалады. Орбита осы иілу бұрышы кезінде 12-сағаттық периодымен және солтүстік жартышарда апогеймен солтүстік аудандарды қамтуға ыңғайлы болады. Бұл орбита солтүстік ендікте орналасқан, мәрелік аудандардан пайдалы жүктемені шығару оңайлығымен ерекшеленеді. Шығарудың баллистикалық заңдылықтары мынандай, мәні мәрелік ауданның (мысалы, экваториалдық) ендігінен аз болатын, орбитаның кез келген иілу бұрышы кезінде, ерекше әрекетті талап етеді. Солтүстік ендіктерде орналасқан, мәрелік аудандар үшін орбитаға шығарудың пайдалы жүктемесі айтарлықтай. Бұл ССРО-ға жерсеріктерді 45° с.е-тен жоғары орналасқан мәрелік аудандардан шығару кезінде иілгіш орбитаны қолдануға және Францияға мәрелік аудандарды Франциядағы Гвианада орналастыруға әсерін тигізді.
Солтүстік аудандарды қамту біруақытта бірнеше жерсеріктердің істеуі негізінде орындалады. Мұндай жүйе, синхрондық жерсеріктер жүйесінен аз ыңғайлы.
Ең алғашқы ғарыштық жылдамдық 7,91 км/с.
Тасымалдаушы-ракеталар мен жерсеріктердің Жерге қатысты қозғалысы, оқшауланған кеңістіктегі екі гравитациялық өзара әсерлесулерге ұшыраған денелер үшін Ньютонның классикалық заңдылықтарымен анықталады деп траектория сұлбасын қарастырайық.
Осыған орай, осындай екі дене
жүйесінің толық энергиясы ![]() теңдеуімен
анықталады, мұндағы v – объектінің жылдамдығы, m
– оның массасы, R – объектіден Жердің ортасына дейінгі
қашықтық, М - Жер массасы (5,9*1024 кг); G –
әмбебап гравитациялық тұрақты.
теңдеуімен
анықталады, мұндағы v – объектінің жылдамдығы, m
– оның массасы, R – объектіден Жердің ортасына дейінгі
қашықтық, М - Жер массасы (5,9*1024 кг); G –
әмбебап гравитациялық тұрақты.
Жерсерікке оны геостационарлық орбитаға шығаруға жеткілікті энергия көлемін хабарлағанда, тасымалдаушы жерсерікті Жердің ортасынан 42160 км алыстатылған нүктеге (экватордағы Жер радиусы 6360 км) шығарады және оған 3070 м/с-қа тең жылдамдықты хабарлау керек. Физикалық шектеулерге байланысты тасымалдаушы көмегімен үздіксіз өтетін процесс жолымен жерсерікке бұл энергияны хабарлау мүмкін емес.
Эквипотенциалды өрісте реактивті жүйенің жылдамдығының максималды өсіруі DV келесі қатынаспен анықталады:
 , мұндағы
с – жанармай типіне және сопло өлшемдеріне байланысты, газ
бітуінің тиімді жылдамдығы; m0 – орбитаға
шығарылатын жүйенің толық массасы; mf –
пайдаланып қойған жанармайдың массасы.
, мұндағы
с – жанармай типіне және сопло өлшемдеріне байланысты, газ
бітуінің тиімді жылдамдығы; m0 – орбитаға
шығарылатын жүйенің толық массасы; mf –
пайдаланып қойған жанармайдың массасы.
Жылдамдықты максималды өсіру қозғалтқыш параметрлерінің практика жүзінде жететін мәндерімен шектеледі, яғни газ біту жылдамдығымен және тасымалдаушы-ракета конструкциясымен (mf/m0). Бұл теңдеуден бір ракета жерсерікті тікелей орбитаға шығаруға жеткілікті жылдамдық өсірілуін қамтамасыз ете алмайтынын көреміз. Бұл шектеуден шығу үшін, көпсатылы шығару процедурасын қолданады, яғни бірнеше сатыны тізбектей қолданумен жылдамдықтың керекті шекті мәнін қамтамасыз етеді, әрбір саты алдыңғы сатының жанармайы толық жанып біткен соң және қалғанын күшпен тартып алған соң қосылады.
2.2 Жерсерікті орбитаға шығару
Жерсерікті стационарлы орбитаға шығарудың тиімді траекториясының негізгі кезеңдері (экватор жазықтығындағы орбитаның нөлдік иілуі):
1 Жердің айналу жылдамдығын (465м/с) максималды қолдану мақсатымен, экватор жанында орналасқан нүктеден шығыс бағытта шығару басталады. Тасымалдаушының бірінші сатысының толық жанып, қалғанының күшпен алынуы. Екінші сатының жіберілуі және бірінші дөңгелек тұрақ орбитасына жеткендегі қозғалтқышты кесіп тастау (биіктігі 185-250 км). Экватормен қиылысудан бұрын екінші сатының екіншілік қозғалтқыштың қосылуы және үшінші сатының қосылуы (егер ол болса) және оның толық жанып біткенге дейін жұмыс істеуі. Сонымен жерсерік тұрақ орбитасынан ауыспалы деп аталынатын аралық эллиптикалық орбитаға ауысады. Жерсерік жылдамдығы 36700 км/сағ дейін жеткізіледі. Ауыспалы орбитаның апогейі геостационарлық орбита биіктігінде, ал перигейі – экватормен қиылысу нүктесінде орналасқан. Бұл орбитаның иілуі, шеткі орбитаға шығарылатын массаны көбейтетіндей таңдалынады. Ауыспалы орбитаға шығу – экваториалдық жазықтықпен екінші рет қиылысу кезінде;
2 Апогейде (апогейлік қозғалтқыш немесе жоғарғы саты – ҒҰА-ның ажырамас бөлігі) қосымша сатының қозғалтқышын қосар алдында ыңғайлы бағытталуды қамтамасыз ету мақсатымен жерсеріктің тасымалдаушыдан бөлініп, келесі қадамда ауыспалы орбитада (ҒҰА айналу режімінде) бұрыштық әрекет етуі;
3 Ауыспалы орбитада бірнеше айналымдар жасағаннан кейін апогейлік қозғалтқыштың қосылуы. Оның жұмыс істеуі жанармайдың толық бітуіне дейін жалғасады. Нәтижесінде орбитаның өзгеруі жүзеге асады, енді ол дөңгелек стационарлы орбитамен сәйкес келеді;
4 Қосымша қозғалтқыштар жүйесімен шекті түзету жерсеріктің белгіленген бойлық нүктесіне пен ауысуы үшін және период пен орбита экцентриситетінің керекті мәндеріне жету үшін (е=с/а, мұндағы с – эллипс фокусінен ортаға дейінгі қашықтық, а – эллипстің үлкен жарты осі; е=0 дөңгелегі үшін, өйткені с=0). Егер жерсерік айналуынан оның тұрақты болуына және күн батареяларын орналастыру қажет болса, жерсеріктің қалыпты жұмыс істеуіне көшу керек;
5 Жерсерікті оған қойылған жұмыстарды орындау үшін қажет қалыпта ұстау мақсатымен орбитаны периодты түрде түзетеді.
Біркомпонентті ракеталық жанармай ретінде гидразин қолданылады (жоғары тығыздық, төмен молекулярлық салмақ, қуатты меншікті импульс туғызу қасиеті, каталиттілікті сақтау ыңғайлығы, яғни тотықтандырғыш керек емес және басқа әсерлерсіз диссоцияланады (термоқыздыру)).
Бөлшектердің өте жылдам таусылу жылдамдығына иондық қозғалтқыштар ие - өсуге алып келеді (V). Бөлшектер электрондық құралдармен өте жоғары жылдамдықтарға дейін тарқатылады. Бірақ олар әлі тәжірибелік деңгейде.
m – ға және жерсеріктің рұқсат етілген өлшемдеріне, электрлік және механикалық сәйкестендіруші құрылғылар таңдалуына қойылатын маңызды шектеулерді тасымалдаушы – ракетамен анықталады. Ұшу жағдайы осыған байланысты. Тасымалдаушыларды таңдау өте шектеулі, шешетін есептеулер талаптарына сай келетін тасымалдаушы –ракеталарды қолдану көп жағдайда мүмкін болмайды. Ең үлкендері бір уақытта бірнеше жерсеріктерді жіберу үшін қолданылады. Транспорттық ҒҰА көмегімен пайдалы жүктемені төмен жер маңындағы орбитаға шығаруға болады. Жерсерікті ауыспалы эллиптикалық орбитаға шығару үшін қосымша саты керек болады.
Жерсерікті жобалау кезінде тапсырыс беруші талаптарын және жиіліктер диапазонына қойылатын шектеулерді ескеретін негізгі эксплуатациялық сипаттамаларды анықтаудан бастайды. Тізбектей жақындату қолданылады.
Борттық және жер стансаларының өткізу қабілеттерінің сәйкестендіру нәтижесінде жұмыс жиілігі, арналар саны және басқа да параметрлермен анықталады. Осыдан кейін борттық байланыстырушы аппаратураның құрамы (пайдалы жүктеме) анықаталады және жерсерік платформасына қойылатын талаптар, олардың орындалуы келесілерге мүмкіндік береді:
- аппаратураны минималды сигнал жоғалтуларымен және минималды монтаж көлемімен орналастыруға;
- жерсерік бүкіл құралдарының монтаждауды қамтамасыз етеді;
- ретрансляторды басқару үшін қажетті телеметриялық және топтық аппаратураны орнатуға.
Ретранслятор сигналдарын Жер бетіндегі қабылдау аймақтарының өлшемдері антенналар саны мен өлшемдеріне әсер етеді. Тасымалдаушы – ракетаның шектеулі өлшемдерінен үлкен антенналар мәреде жиналады және орбитада орналастырылады. Бұл геометриялық сипаттаманың шектелуіне алып соғады, олар жерсерік конфигурациясын таңдағанда ескеріледі. Ортогональды-поляризацияланған сигналдарды сынаған кезде жерсеріктің тұрақтылығына қатаң шектеулер қойылады.
Күн және Ай тарапынан туған ауытқулармен негізделген күштерден, 1°/жыл жылдамдықпен орбитаның айналуына алып келеді, жерсеріктің орны өзгереді. Жерсерік бойлығын өзгертетін түзетулер жанармайдың айтарлықтай шығындалуын талап етеді; олар жерсеріктер арасындағы қашықтықты қамтамасыз ету үшін. Жерсеріктің ендігінің сақталуы жанармайдың айтарлықтай шығындалуын талап етеді (шамамен 20 кг/жылына m = 900 кг жерсерігі үшін).
Жерсеріктің ендігінің тұрақтылығы қажет, келесі жағдайларда:
- жерсеріктің қызмет көрсету аймағының өзгермеуі;
- кейбір ЖС аз бұрыштарда жұмыс істейді, сондықтан жерсерік радиогоризонт линиясынан шығып кетуі мүмкін;
- ЖС антенналары ЖТД (СТВ) индивидуалды қабылдау үшін тар сәулеге ие және бақылау жүйесі жоқ.
Байланыс жерсерігінің қалыпты жұмыс істеуіне қойылған талаптар және стационарлық орбитаға шығару қажеттілігімен негізделген барлық шектеулер. Сонымен қатар, жерсерікті орбитаға шығаруға алып келетін, ыңғайлы жердегі қызмет көрсетуді, жіберу кезіндегі сәйкес жағдайды және әрекеттер тізбегін ескеру керек. Жерсеріктердің механикалық сипаттамалары қозғалуларды және айналуларды, транспорттау кезіндегі соққыларды ескеру керек.
Тасымалдаушыны таңдау жерсеріктің массасы мен өлшемдерін, механикалық және электрлік сипаттамаларды, жерсеріктің тасымалдаушымен қосылуына әсер ететін, масса ортасының рұқсат етілген орналасуы, балансировка дәлдігі, жердегі нысандардағы кірістерге деген талаптарды, қорек көзі және басқару, сәуле шығару деңгейін анықтауға мүмкіндік береді.
Ең күшті механикалық және акустикалық дірілдерді ҒҰА мәре сәтінде қосылу және қозғалтқыштардың қиылу, сатылардың бөліну кезінде қабылдайды.
Ауыспалы орбитада байланыс аппаратурасы өшірілген және аппаратураны суып кетуден қорғайтын іс-шаралар ескерілуі керек. Ауыспалы орбитада жерсеріктер айналумен тұрақталынады. Егер жерсерік стационарлы орбитада жұмыс күйінде басқаша тұрақталынса, онда екі тұрақтау жүйесіне ие болу керек. Режімнің өзгеруі кезінде жұмыс жағдайы және қорек көзі, термореттеу және басқару жүйелеріне қойылатын талаптар өзгереді.
Орбитада ҒҰА-қа түрлі жағымсыз жағдайлар әсер етеді:
- ғарыштық сәулеленулер;
- ҒҰА, Күн және Жердің өзара орналасуымен негізделген жерсеріктің бірқалыпсыз қызып кетуі және температураның күрт өзгеруі.
Термореттеу әдістері:
1) пассивті әдістер.as/Э (as/Э<0,06) өте аз қатынаспен арнайы жабындарды қолдануға негізделген, мұндағы as – күн энергиясын жұту коэффициенті; Э – сәулелену коэффициенті (белгіленген температура кезінде жерсеріктен сәулеленумен алыстатылатын жылу көлемін сипаттайды).
Бұл жабындарды күміс және алюминий қабығы бар кварцтық пластиналар немесе тефлондық жапырақтан арнайы екіжақты айналар түрінде жасайды.
2) активті – пассивтілерге қосымша ретінде.
а) термостаттар немесе Жерден берілген командалар көмегімен қосылған электрлік қыздырғыштар;
б) үлкен Э тәрізді радиатор зоналарын ашатын немесе жабатын бұрылатын қорғау жабдығы және екі жақты қақпақ;
в) жұмыстық сұйықтықтың жоғалып кетуі және конденсациялары негізінде жылуды алыстататын жылуалмастырғыш түтікшелер.
Қорек көздері. Біріншіден – гальваникалық элементтер.
а) Күн элементтері. Негізінен кремнилік. Оларды жерсерікте қозғалмайтындай қылып орнатады немесе оларды күннің максимум сәулеленуіне әрқашан бағытталатындай қылып жөндейді. Артықшылықтары:
- жасау технологиясы жақсы ойластырылған (Жерде кремний мөлшері көп);
- жоғары меншікті қуат 40 Вт/кг дейін;
- жоғары сенімділік;
- қызметінің 99% уақытында жерсерік Күнмен жарықталынған.
Панельдер қуаты масса және өлшемдермен шектелген.
Геостационарлық жерсеріктер жыл бойы Жер көлеңкесіне 90 рет түседі және күңгірттелудің максималды жалғасуы тәулігіне 72 мин құрайды, сондықтан аккумуляторлар қолданылады. Энергияны аккумуляциялау жүйелерінде заряд және разряд циклдарының саны аз және терең разряд деп есептейік. Аккумуляторлардың 50-70% дейінгі сыйымдылығын қолдануға болады. Төменгі орбиталы жерсеріктер үшін заряд – разряд циклдарының саны жылына мыңды құрайды және сыйымдылық 10-20% дейін қолданылады .
Оларға сенімділікке және қызмет көрсету уақытына қойылатын жоғары талаптардан аккумуляторлар массасы үлкен. Негізінен никель – кадмилік аккумуляторлар қолданылады. Олардың меншікті қуаты 12 Вт/кг (70%-ға дейін разрядталу кезінде) құрайды. Ni-H2 және Ag-H2 аккумуляторлары шығарылуда. Олардың массасы 30-60%-ға аз.
б) Ядерлік көздер. 1 кг U235 түрлендіру ПӘК (КПД) 10% болғанда, 1 МВт*с энергияны бере алады. Артықшылықтары: Күнге бағытталуды, аккумуляторларды талап етпейді. Кемшіліктері: аппаратураны радиациядан қорғау үшін қуатты экрандау қажет; радиоактивтік материалдарды ластанудан тазарту қажет (қымбат тұратын тазалау).
2.3 Жерсеріктерді тұрақтандыру
Орбитаға шығарудан кейін жерсерік орны антеннаны керек бағытта ориентирлеуді қамтамасыз ету үшін тұрақтау керек.
ЖЖС-ға бірқатар ауытқымалы күштер әсер етеді:
- жердің магниттік өрісі;
- күн сәулеленуінің қысымы;
- ішкі қозғалтқыштардың, тісті таратулардың және тұтқыштардың компенсацияланатын қозғалысы;
- гравитациялық градиент (Жер массасының ортасынан ЖЖС-ның түрлі бөліктеріне дейінгі қашықтықтардың айырымымен туған жер тартылысының күштерінің айырымы).
Ішкі айналдырушы сәттерден басқа, барлық осы күштер өте аз, бірақ тұрақты әсер етуді іске асырады. Ішкі айналдырушы сәттер үлкен болғанымен, аз уақытқа әсер етеді.
Тұрақтаудың негізгі екі әдісі: айналдырумен тұрақтау және тікелей тұрақтау.
Жерсеріктің орнын кеңістікте тұрақтаудың қарапайым түрі - 30/100 айн/мин жылдамдықпен айналдыру негізінде тұрақтау. Мұндай "айналдыру" жерсерікті қозғалудың үлкен санына ие сермерге айналдырады. Қозғалыстар санының вектор моменті өзінің бағытын тұрақты сақтауға тырысады, осы жерсеріктің орнын тұрақтауды қамтамасыз етеді. Жерсерікті немесе оның бөліктерін айналдыру негізінде гироскопистік қаттылық және айналу осін ориентирлеумен сипатталатын жерсеріктің бұрыштық орнын тұрақтандыру пайда болады, аз қуатты қозғалтқыштар көмегімен периодты түрде түзету жолымен мүмкін болады.
Айналумен тұрақталынатын байланыс жерсеріктерін келесі түрде орындауға болады:
- жерге қатысты сәуленің тұрақты ориентирленуін қамтамасыз ету үшін айналмалы барабаны және электронды-фазалық антенналық торы бар, қарапайым ротор түрінде;
- екі рет айналмалы жерсеріктер. Сонымен қатар айналмалы барабан қолданылады, бірақ қатысты аз инерциондыққа ие жерсерік платформасы кері бағытта қозғалады және осыған байланысты нөлге жуық бұрыштық жылдамдыққа ие. Ондағы орнатылған антенналар әрқашан Жерге бағытталған. Кері бағытта айналатын, ЖЖС және оның айналмалы бөліктері, құрамында подшипниктік механизм және жетек бар, өзара агрегат көмегімен байланысқан;
- екі рет айналмалы жерсеріктің жаңа түрі ретінде үш рет айналмалы жерсеріктер. Күн батареялары бар панельдер айналу периоды 24 сағатқа тең жерсеріктің үшінші секциясына қосылады. Осыған байланысты Күнге қатысты панельдердің ориентирлеуінің тұрақталуы қамтамасыз етіледі.
Кең қолданысқа екі рет айналмалы жерсеріктер ие болды.
Жерсеріктің үш осьті немесе тікелей тұрақтаудың астарында, оның әрбір осіне қатысты жерсеріктің бұрыштық орнын басқаруды түсінеді. Мұндай басқару не бұрыштық қозғалыстарды тікелей өлшеу және барлық үш оське қатысты сәттерді қосымша қылу, не жерсерікке бір, екі немесе үш осьтің гироскопистік қаттылығын қамтамасыз ететін, кинетикалық сәтті құралдарды қолдану негізінде орындалады. Ауытқулар жағдайында жерсеріктің тұрақты ориентирленуді сақтау үшін бұл құралдар сезімтал элементтермен және сәт датчиктерімен жабдықталады.
Жерсеріктердің үш типтік конструкциясы:
- гироскопистік қасиеттерге ие емес жерсеріктер. Оларда жерсерік ориентациясы анықталатын сезімтал элементтер және гироскоптар орнатылады. Бұрыштық қалыпты басқару үшін аз қуатты қозғалтқыштар қолданылады;
- белгіленген номиналды жылдамдықпен айналатын, қатты тығындалған немесе кардандық аспада ілінген сермер жерсеріктер гироскопистік қасиеттерге ие жерсеріктің бір осін тұрақтайды. Жерсеріктің ориентирленуін басқару сермерінің айналу жылдамдығын өзгерту және сермердің өз айналуының осін тұрақты ориентирлеуді сақтау мақсатымен, сәтті (мысалы, аз қуатты қозғалтқыштар және кардандық аспа осьтеріндегі қозғалтқыштарды тұрақтандыру) туғызуға арналған, құрылғыларды эпизодты қолдану жолымен жүзеге асырылады;
- қосындылы кинетикалық сәт нөлдік болатындай, әрбір сермерінің бұрыштық жылдамдықтарын өзгерту жолымен ориентирлеуді басқару үшін үш сермері (әрбір ось үшін бір-бірден) бар жерсеріктер.
Кең қолданысқа айналмалы сермерлері бар жерсеріктер ие болды. Ары қарай дәл осылар екі рет тұрақталынатын жерсеріктермен салыстырылады.
Айналу тұрақталынуымен және тікелей тұрақтаумен жерсеріктердің салыстырмалы анализі.
1) Жалпы конфигурациясы.
Екі рет айналумен тұрақталынатын жерсеріктер барабаны, күн элементтерімен жабылады, ал антенналар сәулелену айналу осіне перпендикулярлы бағытта болатын, қарсы айналымы бар платформада орнатылады. Тікелей тұрақталулы жерсеріктердің күн батареялары Күнді бақылауды жүзеге асырады. Батареяларды орналастыру ауыспалы орбитада жүзеге асырылады. Антенналар әдетте жерсеріктің негізгі корпусында орнатылады және олардың сәулелену бағыты шамамен жерсеріктің бас осіне параллель болады.
Екі рет айналумен тұрақталынған жерсеріктер үшін, қолданылатын тасымалдаушымен негізделетін габариттік шектеулер, өте үлкен мәнге ие. Олармен барабанның максималды өлшемдері шектеледі және осыған орай, қол жеткізілетін қуат, сонымен қатар жерсеріктің негізгі корпусының үстінен антеннаның биіктелуі шектеледі.
2) Энергияны генерациялау.
Жоғарыда айтылғандай, екі рет айналмалы жерсеріктердің энергетикалық мүмкіндіктері, тасымалдаушының көлденең қимасының аздығынан шектеледі. Үлкен диаметрлі корпусы бар тасымалдаушы – ракеталарды қолдану кезінде жерсеріктің орбитада 7 жыл болғаннан кейінгі максималды генерацияланған қуаты шамамен 1 кВт болады. Айналумен тұрақтандыру күн батареясы Күнмен тиімді тек 1/p уақыт жарықталуына алып келеді. Осыған орай, барабан түрінде жасалынған батареяның массасы мен бағасы Күндегі ориентирленген жазық батареядан бірнеше есе көп, өйткені бірінші жағдайдағыдай бірдей қуатты алу үшін күн элементтерімен қамтылатын аудан, шамамен 3 есе көп болу керек. Екінші жағынан барабан түріндегі батарея қарапайым және өзінің орнатылуы үшін арнайы механизмді талап етпейді. Үш рет айналумен тұрақталынған жерсеріктерді тұрақтау кезінде қуаттың төмендеуіне байланысты қиындықтар азаяды. Бірақ энергияның таралуы кезінде механикалық және конструктивтік қиындықтар, шектен көп балансталмаған күндік сәттер және қиындықтар туады. Сондықтан үлкен қуат керек болған кезде тікелей тұрақталуды қолданады.
3) Тұрақталуды басқару.
Екі реттік айналуды қолданатын тұрақталуды басқару жүйесі, жерсеріктің тікелей тұрақталуын жүзеге асыратын жүйелерден қарапайым. Орбитаға шығару процесінде айналумен тұрақталынатын жерсеріктерді тікелей тұрақтау, екі борттық тұрақтау жүйесін құруды қажет етеді. Бұл жерсеріктің массасының мен бағасының өсуіне және сенімділік көрсеткішіне қойылатын талаптардың қаталдануына алып келеді. Екінші жағынан екі рет айналумен тұрақтандыратын жүйенің кейбір сипаттамалық ерекшеліктері оларды жоғары дәлдік қажет жағдайларда қолдануға мүмкіндік бермейді. Бұл жүйелердің кемшіліктеріне айналмалы секцияның көп тепе-теңделуінен туатын нутациялық қозғалыстарды, жерсерік платформасының тұрақталуын қамтамасыз ететін сәт лүпілдерін, подшипниктердің қызмет көрсету уақытының өтіп кетуінен болатын лүпілдер, сонымен қатар антенналар орнатылған форманың жылулық және механикалық деформациялары жатады.
4) Термореттеу.
Екі рет айналуы бар жерсеріктерінің термореттеу жүйесінің параметрлері энергияны генерирлейтін жүйелердің қуатындай айтарлықтай өлшемдерге тәуелді. Аппаратураның жұмыс істеуі кезінде энергияның айтарлықтай шашырауы болады. Оларды екі рет айналуы бар жерсеріктердегі сәулеленуге байланысты алып тастау тек оның солтүстік сыртқы шегімен жүзеге асырылады. Бірақ бұған оны сирек жауып қалатын антенналар бөгет болады. Тікелей тұрақталулы жерсеріктерде солтүстікке және оңтүстікке бағытталған, екі қатысты сыртқы және көлеңкеленбейтін шектерді алдын-ала білсе болады және осымен стационарлық орбитадағы термореттеу қарапайымдандырылады. Сонымен қатар екі рет айналуы бар жерсеріктерде платформаның тұрақталуын қамтамасыз ететін механизмнің өзі суып кетуден қорғауды талап етеді. Бұл термореттеу мәселесін айтарлықтай күрделендіреді. Күн элементтері және антенналары бар панельдердің өлшемдері үлкен бола бастағандықтан (панельдің сызықтық өлшемі және антенна диаметрі 10 м дейін), күндік сәулелену әсерінен туатын ауытқымалы сәттерді тепе-теңдікте ұстау қиындығы туады және үш ось бойынша тұрақтау қажет болады.
Екі осьтік және үш осьтік тұрақтау жүйелерін салыстыру.
Екі осьтіктің үш осьтік алдындағы артықшылығы.
а) Кеңістіктік орнын анықтау қарапайымдылығы. Сканерлеу сермер жүзеге асырылады, айналу сәтінің болуы тікелей жорту бұрышын өлшеу қажеттілігін алып тастайды.
б) Аз қуатты қозғалтқыштардың минималды саны. Күштік құрылғыдағы жанармай шығындалуын басқару үшін (яғни ракеталық жанармайды соплоларға беру) сермердің ортаға тартылыс күші қолданылады, бұл кезде аз қуатты қозғалтқыштардың минималды саны қажет болады; бір қатысты жоғары тарту шамасы жерсеріктің кеңістіктегі орнын тұрақтаумен қатар,сонымен оның орнын сақтауға қолданылуы мүмкін.
в) Жерсерік күйінің "қаттылығы". Айналу сәті жерсерік күйіне қаттылық береді, ол өз кезегінде ҒҰА ішінде туатын сәттер әсерін азайтады, сонымен қатар белгіленген кеңістіктік орнынан басқа сәттердің әсерінің нәтижесіндегі туған ауытқуларды болғызбайды. Осының арқасында Жерден берілген хабар бойынша компенсациялауға жеткілікті уақытқа ие болады. "Қаттылық" кеңістіктік жағдайда апогейде қозғаушы қосылған уақытта қолданылады.
Кемшіліктері
а) Қорғанушылық деңгейі. Екі ретті айналудың тұрақтантандыру катастрофалық бірлік подшипник жүйеде іске қосылмауы мүмкіндігі байланыста шығынға алып келеді, жерсерік функциясын орындамауы мүмкін. Одан басқа қуат шығындары радиожиілікті сигналды тарату кезінде жиіліктің өсуімен өседі, сондықтан қарсы айналмалы резервты кодтау –декодтау құрылғысының екі жақты механизмін қосу керек.
б) Жерсерік диаметрінің шектелуі. Берілген осьтерге қатысты стабилизациялау қажетті айналатын дене, мыс. қарындашқа қарағанда тұрақты формаға ие болуы қажет. Егер жерсерік диаметрі ракетаның сүйірімен (обтекаль ракеты) – тасымалдаушымен шектелсе, онда бұл шектелу аса маңызды сипатта болады.
в) Нутация (коникалық қозғалыс). Нутация компенсациясы үшін кері айналымдағы платформаны механикалық демпфирлеу керек. Нутация орталық пен көлденең инерция моментінің жағымсыз қатынастар қорытындысы және де айналатын ЖЖС аймағындағы бактардың ішіндегі жанармай шашыраулары себебінен энергияның жоғалту нәтижелері болып табылады.
г) Қуат. Егер күндік элементтер айналатын барабанда жөнделсе, онда берілген қуатты алу үшін оның үлкен көлемі қажет, бұл m және кеме құнының ұлғаюына әкеп соғады. Байланыс арнасында қажеттілігі мен әр антеннаның сәулелену қуаты артқан кезде және де жоғары жиілікке өту кезінде, автоматизацияның және деректерді борттық өңдеуді кең қолдану кезінде бұлармен есепке алу қажет.
Қорытындылар:
Кеңістік күйдегі анықталу жүйесі қиындатылғандықтан үш ось бойынша стабилизациялау кезіндегі сенімділік төмендейді, бірақ соңғысы резервтелуі мүмкін.
Екі айналымы бар стабилизация сенімділігі кері айналым жүйесі себебінен төмендейді.
Стабилизацияның екі тәсілі де құны бойынша теңестіруге келеді.
Өтпелі орбитада жерсеріктер айналу арқылы стабилизацияланады. Негізгі тапсырмалар:
- бағыттың жіберілген қателіктерімен анықталатын деңгейге дейінгі тасымалдаушының ажыратуларымен шақырылған нутационды тербелістерді демпфирлеу;
- өздігінен тұрақты жерсеріктің нутационды тербелістерін демпфирлеу, яғни өздік айналу осі инерцияның максималды моменті осіне сәйкес келетін жерсерік жеңіл орындалады. Ол үшін тиімді және жеңіл тербелісті жүйе қолданылады, мысалы иілген трубкадағы маятник немесе шар. Жүйенің димпфирлеу коэффициенті мен резононастық жиілік жерсеріктің нутационды тербеліс жиілігіне сәйкес таңдалады. Жерсерік тұрақсыз болған кезде демпфирлеу басқарудың активті контур көмегімен іске асырылады. Басқарудың активті контур құрамына нутациялық тербеліске (жылдамдықты героскоп) сезімтал датчик және орындаушы механизм (мысалы аз тартылысты қозғалғыш). Екі айналымы бар жерсеріктің нутационды тербелістері тек бір ғана айналатын барабан тұрақсыз болған кезде де демпфирленуі мүмкін; бұл кезде платформаның өзіндік айналу жылдамдығы нөл немесе одан төмен болуы қажет, ал энергияның негізгі таралуы платформада іске асырылуы қажет. Демпфер қарсы айналымы бар платформада орналастырылады;
- кеңістік күйдің бастапқы және ақырғысын анықтау. Борттық датчиктер Күн мен Жерге қатысты жерсеріктің өзіндік айналу осінің бағытын сипаттайтын бұрыштарды және де жерсерік – Күн және жерсерік – Жер сәулелері арқылы пайда болатын бұрыштарды өлшейді;
- өзіндік айналудың ось бағыты. Жерсерік өтпелі орбитада болған кезде байланыс жер станциясымен болуы мүмкін, оның өзіндік айналу осін шамамен 1300 бұру қажет. Бұл бұрылыс аз тартылысты қозғалтқыш жұмысына шартталған прецессионды қозғалыстың нәтижесінде орындалады. Минимальды тартылыс бірнеше Н, ал маневрдің өзі шамамен 1,5 сағ. немесе бірнеше сағат;
- апогейдегі қосымша қозғалтқыштың қосылуы. Оның қосылуы өтпелі орбитаның жерсерікті берілген нүктеге жету кезінде болады. Жерсеріктің өзіндік айналу осі дұрыс ориентерленуі қажет (10 төмен дәлдікпен). Бұл қозғалтқыштың жарнамай массасы шамамен толық жерсеріктің жарты массасына тең болғандықтан, бағытының қателік әсері, уақыт санауы және суммарлы тартылыс нақты болып табылады.
Жерге қатысты жерсерік бағыты. Жерсерікті стационарлық орбитаға шығарғаннан кейін және жерсеріктің қажетті ұзақтығына жету нәтижесінде коррекцияны қайта орындауда оның бағытын Жерге қатысты өзгерту керек. Айналыммен стабилизацияланған жерсерік қолданылса, тапсырма жеңіл орындалады. Тікелей стабилизацияда жерсерікті айналдыру, содан кейін маховикты бұрау, күндік батареяларды бұру және содан кейін ғана жерсерікті бұруды бастау керек.
Стационарлық орбитадағы екі айналымы бар жерсеріктің орындайтын функциялары:
Стационарлық орбитадағы стабилизация жүйесіне ұсынылған талаптардың өтпелі орбитадағы талаптардан айырмашылығы бар:
- жерге бағытталуды ИК-сәулелену өткірбағытты датчиктің көмегімен үздіксіз анықталғандықтан, өзіндік айналудағы бұрыштық ось бағытының тапсырмасы оңай шешіледі. Кері бағытта айналатын антенна берілген зонаның тұрақты жабылу мақсатымен стабилизацияланады. Жерсеріктің түзетілетін бұрыштық бұрулары басқа екі осьтің аймағында аз тартылысты бір осьтік қозғалтқышпен орындалады. Егер қозғалтқыш импульсты режімде жұмыс істесе, онда ол айналу циклінің бір секторында қосылады. Секторды таңдаған кезде кез келген берілген осьтің аймағында бұрылыс жасауға болады.
Егер қозғалтқыш үздіксіз жұмыс істесе, онда оның жұмыс нәтижесінде пайда болатын массаның орталығына келтірілген және меридиана жазықтығында орналасқан тартылыс векторын орбитаны түзету мақсатында маневрлеу үшін қолдануға болады. Жерсеріктің ұзақтығын өзгерту үшін жерсеріктің өзіндік айналу осіне перпендикуляр орнатылған аз тартылысты екінші қозғалтқыш пайдаланылады. Талап етілген маневрді орындау үшін көлденең қозғалтқыш айналудың сәйкестендірілген секторында қосылады. Жерсеріктің перифериясында орнатылған аз тартылысты үшінші тангенциялы қозғалтқыш өзіндік айналудың жылдамдығын басқару үшін қолданылады. Екі айналымы бар жерсерік жоғарғы гиперболалық қаттылыққа ие, бірақ бағытының периодтық түзетілуін талап етеді. Көбінесе күндік сәулеленудің орталық қысымы және жерсеріктің орталық массасы конструкцияның симметриялық еместігінен бір бірінен алшақ орналасқан, ал бұл ауытқымалы моменттердің пайда болуына әкеп соғады.
Негізгі барабанның ішіндегі аппаратураны мұқиятпен жинақтау есебінен кіші антенналарды пайдалану кезінде масса орталығы мен қысым орталығының қашықтығын 5 см –ге дейін азайтуға болады, бірақ үлкен антенналарды қолданған кезде ол 60 см-ге дейін жетеді. Бұл жағдайда күндік сәулелену сезілетін ауытқымалы моментті береді. Сондықтан периодтық түзетілу, өзіндік айналудың осьтік бағыты жүргізіледі. Жерсерік ерекшелігінің тәуелділігінен түзету периоды 3-тен 6 күнге дейін. Жүйенің кинетикалық моменті үлкен болғандықтан, тартылыс деңгейіне талаптар үлкен емес.
Стационарлық орбитадағы тікелей стабилизациялы жерсерікпен орындайтын функциялар:
Нөлдік кинетикалық моменті бар әр денені үш оське қатысты стабилизациялауға болады. Героскопикалық емес жүйені стабилизациялау үшін жорту бұрышының датчигі қажет. Жорту бұрышын өлшеу кезінде астронавигационды датчиктер күндік батареямен жабылған, ал күндік датчиктерді стационарлық орбитадағы күн Жермен коллинеарлы болғандықтан қолдану болмай жатыр. Жорту бұрышын өлшеу үшін гидроскоптар қолданылады, бірақ қателіктің өсуінен уақыт өте келе периодтық түзетуді қарастыру қажет. Бірақ бұл жерсерікке айналатын маховикті орнатудан әлдеқайда қиын болуы мүмкін. Бұндай жүйенің негізгі элементі маховик болып табылады. Оның параметрлері (масса және айналу жылдамдығы) сондай, ауытқымалы моменттердің бар екендігіне қарамастан оның кинетикалық моменті аз тартылысты қозғалтқыштардың жиі қосылуынан сақтайды. Және де маховик массасы үлкен үлкен болмауы керек. Ауытқымалы моменттер жерсеріктің қысым орталығынан масса орталығына дейінгі қашықтықтың азаю есебінен минимизациялауға тырысады.
Екі айналымы бар жерсеріктің айырмашылығынан тікелей стабилизациялы жерсерік бағытын өтпелі орбитада қолданылатын датчиктердің көмегімен анықтай алмайды. Бұл мақсат үшін басқа датчиктер (Жерге бағытталған статикалық ИҚ-датчиктер) қолданылады. Олардың көмегімен тангаж және крен бұрыштары туралы ақпаратты алады. Жерсеріктің ұзақтығын түзету үшін тартылыс векторлары меридиана жазықтығына перпендикулярлы массалар орталығы арқылы өтетін қозғалтқыштар қолданылады. Жерсеріктің солтүстік және оңтүстік шеттерінде орналасқан аз тартылысты бір қозғалтқыш көмегімен енін түзетуге болады, бірақ әдетте бұл жерлер күндік батареяның сервоприводтарынан бос емес. Олай болса, масса орталығына қатысты симметриялы орналасқан, синхронды жұмыс істейтін және вектор тартылысы меридиана жазықтығында жататын екі қозғалтқыш қажет.
3 ҒА ауытқымалы емес қозғалысы
3.1 Екі дененің есебі
Аспандық дененің ауытқымалы емес түсінігінде сферикалық симметриялы біртекті дененің пайда болуымен тартылыстың орталық өрісіндегі қозғалысты айтады. Білетініміздей сияқты дене барлық массасы орталыққа нақтыланғандай болып басқа денені тартады.
Денелердің ауытқымалы емес қозғалыстарының заңдарын аспандық механика оқытады. Оның негізгі құрамы Ньютон заңы бойынша бір-біріне тартылатын N материалды нүктелердің қозғалысын оқып-үйрену болып табылады. Қазіргі уақытта тапсырма тек N=2 үшін шешілген. N=3 кезінде математикалық қиындықтар соншалықты үлкен, аналитикалық шешілулері тек қозғалыстың сирек жағдайлары үшін алынған.
Екі дененің тапсырмасы екі материалдық нүктелердің өзара тартылыс әсерінен қозғалысты зерттеу болып табылады. Ол ауытқымалы емес қозғалыстардың негізгі заңдылықтарын шығарады.
Үлкен және кіші денелердің қозғалысы тартылыс күшінің әсері басқа аспандық денеге әсері нәтижесінде өзара байланысқан. Бұл қозғалыс аспандық механикада екі дененің жалпы тапсырмасы ретінде оқытылады.
Бізде екі дене бар делік: үлкен – М, кіші – m (3.1 суретті қара)
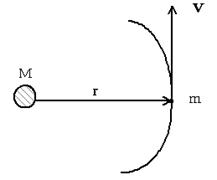
3.1 сурет – Екі дененің өзара қозғалысы
М денесі қозғалыссыз деп қарастырайық. Сонда m денесінің қозғалыс теңдеуі келесідей сипатта болады:
![]()
немесе
![]()
мұнда f – әмбебап гравитациондық тұрақтылық.
Егер m денесі қозғалыссыз болса, онда М денесінің теңдеуі былай болады:
![]()
немесе
![]()
М және m денелерінің қатыстық қозғалыстарының жылдамдығы мен үдеуі:
![]()
![]()
немесе
![]()
Қозғалыстың ақырғы теңдеуі:
![]()
мұнда f · (M + m) – М және m денелер тартылысының ортақ өрісін сипаттайтын өлшем.
Кіші дененің массасы үлкен дененің массасынан біраз кіші:
m << M .
Бұл шарт ҒА үшін де орындалады, сондықтан үлкен дененің тартылысымен кішісінін жұмсауға болады. Осы сияқты тапсырма екі дененің шектеулі тапсырмасы деген атқа ие болды.
Бұл тапсырманы шешу кезінде инерциолды кеңістікте осьтері айналмайтын жүйенің координаталар басы үлкен аспандық дененің орталығымен бірлеседі (мысалы, Жер). Олай болса, координата жүйесі инерциалды болады және ҒА қозғалысының векторлық дифференциалдық теңдеуі келесідей сипатқа ие:
|
|
(3.1) |
Мұнда m – тартатын орталықтың гравитациялық параматрі (мысалы, Жердің).
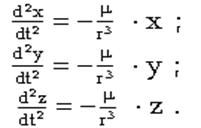
Инерциалды координата жүйесіндегі бұл векторлық теңдеу үш дифференциалды теңдеу жүйесіне эквивалентті:
|
|
(3.2) |
Орталық тартылыс өрісінің моделін қолдану көмегімен (яғни орталық өрістің тартылыс күшінен басқа күштер кіші деп есептеген жағдайда) (3.2) жүйе интегралданатын болып табылады. Басқаша айтқанда ол шешілуі мүмкін және оның шешілу нәтижесінде жеткілікті қарапайым қатынас алынады. Бұлар қозғалыс заңдылығының негізін сипаттайды. Бұл жүйенің жалпы шешілуі бірінші алты тәуелсіз интегралдың жиынтығын көрсетуі мүмкін. Бұлардың әрқайсысы анилитикалық анықтауды көрсетеді және бір тұрақты интегралданудан тұрады. Ауытқымалы емес қозғалыстың тапсырмасын шешу – алғашқы алты интегралды немесе алты тәуелсіз тұрақты интегралдануды табу болып табылады.
Бұны дифференциалды теңдеу аппаратын пайдалана отырып жасауға болады. Біз мұнда векторлық алгебра элементтері көмегімен ауытқымалы емес қозғалыстың алғашқы интегралын қарапайым жолмен аламыз.
Бастапқы векторлық теңдеуді (3.1) 2i -ге скалярлы көбейтеміз
![]()
және оны түрлендіреміз. Аламыз
![]()
Бірақ
![]()
Сондықтан соңғы келесі түрге түрленеді:
![]()
Бұл теңдеуді интегралдап, аламыз:
![]()
мұнда h – тұрақты интегралдау.
Бұл теңдеу желінің бірінші интегралы (3.2), бұл келесі түрде ұсынылуы мүмкін:
|
|
(3.3) |
немесе T + U = h,
мұнда T - кинетикалық энергия; U - потенциалдық энергия; h - константа.
Осыдан келе бірінші интеграл (3.3) энергияның сақталу заңын көрсетеді, сондықтан бұл энергия интегралы деп аталады, ал һ тұрақты интегралдануы тұрақты энергия деп аталады. Энергия интегралынан ауытқымалы емес қозғалыс сипаттамасы жөнінде бірнеше қорытынды жасауға болады:
а) келесі түрде жазылған энергия интегралынан:
![]()
Тартылатын орталықтан r жылдамдығын ұлғайтқан кезде ҒА жылдамдығы азаяды және керісінше.
б) ҒА жылдамдығы алдамшы бола алмайды, сондықтан
![]()
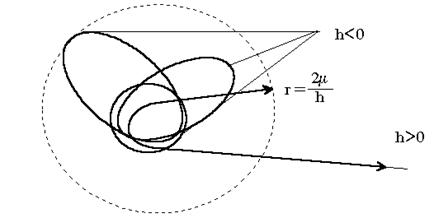
Яғни, егер h > 0 болса, онда радиус
векторы шектеусіз өсуі мүмкін, ал егер де h<0 болса, онда
ҒА өз қозғаласында r=2·![]() /h радиусымен сфераның сыртына
шықпайды. Бұл сфера нөлдік жылдамдықтың беті деп
аталады (3.2 суретті қара).
/h радиусымен сфераның сыртына
шықпайды. Бұл сфера нөлдік жылдамдықтың беті деп
аталады (3.2 суретті қара).
в) Егер r![]()
![]() болса, онда V2
болса, онда V2![]() h, яғни ҒА жылдамдығы шексіз
жылдамдықта тартылатын орталықтан алшақтану кезінде
құрайды
h, яғни ҒА жылдамдығы шексіз
жылдамдықта тартылатын орталықтан алшақтану кезінде
құрайды
![]()
Бұл жылдамдық шексіздіктегі жылдамдық деп аталады.
3.2 сурет – Нөлдік жылдамдықтың беті
Жүйенің екінші интегралы ұқсас өзгеру арқылы алынады.
Бастапқы векторлық теңдеуді (3.1) r-ге көбейтеміз:
![]()
Векторлық шығару құрамы бойынша r x r = 0, осыдан
![]()
Ескерсек
![]()
және
![]()
аламыз
![]()
Интегралдаудан кейін аламыз:
![]()
Мұнда C- тұрақты интегралдау.
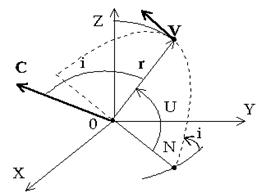
(3.2) жүйе интегралының бұл теңдеуі алаң интегралы деп аталады, C- C1, C2, C3 компоненттері бар тұрақты вектор. C тұрақтысы алаң тұрақтысы деп аталады.
Қозғалыстың сипатын анықтау үшін бұл теңдеуді r-ге скалярлы көбейтеміз
![]()
Ескере отырып
r ![]() (r x v)=0, r
(r x v)=0, r ![]() C=0
C=0
немесе координаталар жүйесінің инерциалды осінің проекциясында
C1 ![]() X + C2
X + C2 ![]() Y + C3
Y + C3 ![]() Z = 0 .
Z = 0 .
Бұл координата бастары арқылы өтетін жазықтық теңдеуі. Осыдан келе, ҒА ауытқымалы емес қозғалыс өзгермейтін жазықтықта болады және де С векторы әр уақытта оған перпендикуляр болып келеді. C алаңының тұрақтысы кеңістіктегі орбита жазықтығының күйін анықтайды. Бұл әр уақыт моменті үшін әділ болғандықтан орбита жазықтығы ҒА бастапқы жылдамдық векторы арқылы өтеді. Сол себептен алаң заңына сәйкес ҒА ауытқымалы емес қозғалысы тартылыс орталығы және бастапқы жылдамдықтың векторы арқылы өтетін жазықтықта болады (3.3 суретті қара).
3.3 сурет – Интеграл ауданы
(r x v) өнімі ҒА кинетикалық моменті, сондықтан алаң интегралы кинетикалық моменттің сақталу заңын көрсетеді:
![]()
Алаң интегралының геотметриялық мәнін анықтайық (3.4 суретті қара).

3.4 сурет – Интеграл ауданының геометриялық мәні
Мұнда O –
тартылыс
орталығы; А
және В нүктелері t
және t+![]() t уақыт
моменттеріндегі ҒА күйін бейнелейді, V –
ҒА жылдамдығы; ds – ОАВ
элементарлы үшбұрышының алаңы.
t уақыт
моменттеріндегі ҒА күйін бейнелейді, V –
ҒА жылдамдығы; ds – ОАВ
элементарлы үшбұрышының алаңы.
![]()
немесе
![]()
(r x V) өнімі С алаңының тұрақтылығы бар, олай болса оның модулі радиус-вектормен алмастырылған элементарлы үшбұрыштың алаңына тең.
d![]() /dt өлшемі секториалды жылдамдық
деп аталады. Интегралдау нәтижесінде аламыз:
/dt өлшемі секториалды жылдамдық
деп аталады. Интегралдау нәтижесінде аламыз:
![]()
Яғни ҒА секториалды жылдамдығы оның орбита бойынша қозғалысы кезінде тұрақты өлшем болып табылады.
Екі дене тапсырмасының дифференциалдық теңдеу жүйесіне тағы бір бірінші интегралды келтірейік - Лаплас интегралы:
|
|
(3.4) |
мұнда f - f1, f2, f3 компоненттері бар тұрақты вектор (тұрақты интегралдау). Оның бағытын анықтайық. Ол үшін (3.4) теңдеуін С-ке скалярлы көбейтеміз:
![]()
Өзара перпендикулярлы векторлардың
скалярлы өнімділігін көрсеткендіктен, теңдеудің
оң жағындағылар 0-ге тең. Яғни C![]() f=0, немесе
координаталық формада:
f=0, немесе
координаталық формада:
|
c1 f1 + c2 f2 + c3 f3 = 0. |
(3.5) |
Олай болса, f векторы C векторына перпендикуляр, яғни орбита жазықтығында жатыр.
Сол себептен, ауытқымалы емес қозғалысты сипаттайтын (3.2) дифференциалдық теңдеулердің жүйелерін шешу нәтижесінде 7 көлденең тұрақтылық алынды: h, c1, c2, c3, f1, f2, f3.
Олар бір-бірімен екі қатынас арқылы байланыста: (3.5) қатынасы және келесі қатынас:
|
f2 = |
(3.6) |
Яғни олардың ішінен тек бес тәуелсіз. Бұл бес тұрақтылық тәуелсіздігі қозғалыстың динамикалық және кинетикалық сипаттамаларын анықтайды. Жетіспейтін алтыншы көлденең тұрақтылық тікелей интегралдау арқылы алынуы мүмкін. Мысалы, энергия интегралынан, алаңан және Лапластан, (3.5), (3.6) қатынастарын ескере отырып, алтыншысы арқылы (мысалы, X) X, Y, Z өлшемдерінің кез келгенін және көлденең тұрақтылықты көрсете аламыз:
Y = ![]() 1( X, h, c1, c2, c3, f1, f2, f3 );
1( X, h, c1, c2, c3, f1, f2, f3 );
Z = ![]() 2 ( X, h, c1, c2, c3, f1, f2, f3 );
2 ( X, h, c1, c2, c3, f1, f2, f3 );
![]() =
=
![]() 3 ( X, h, c1, c2, c3, f1, f2, f3 );
3 ( X, h, c1, c2, c3, f1, f2, f3 );
![]() =
=
![]() 4 ( X, h, c1, c2, c3, f1, f2, f3 );
4 ( X, h, c1, c2, c3, f1, f2, f3 );
![]() =
=
![]() 5 ( X, h, c1, c2, c3, f1, f2, f3 ).
5 ( X, h, c1, c2, c3, f1, f2, f3 ).
![]() =
=
![]() 3( X, h, c1, c2, c3, f1, f2, f3 )
болғандықтан, осы теңдеулерді интегралдай аламыз.
3( X, h, c1, c2, c3, f1, f2, f3 )
болғандықтан, осы теңдеулерді интегралдай аламыз.
t = F(X) + g
мұнда g – тұрақты интегралдау, ол қозғалыс параметрін уақытпен байланыстырады.
Енді тапсырма толығымен орындалды. Біз уақыт арқылы қозғалатын нүктелер жылдамдығы мен координаталары үшін формулаға және интегралданудың көлденең тұрақтысына
X=F1 (t, h, g, c1, c2, c3 ...);
Y=F2 (t, h, g, c1, c2, c3 ...);
Z=F3 (t, h, g, c1, c2, c3 ...);
![]() =F4
(t, h, g, c1, c2, c3 ...);
=F4
(t, h, g, c1, c2, c3 ...);
![]() =F5
(t, h, g, c1, c2, c3 ...);
=F5
(t, h, g, c1, c2, c3 ...);
![]() =F6
(t, h, g, c1, c2, c3 ...).
=F6
(t, h, g, c1, c2, c3 ...).
Бұл (3.2) жүйесінің толық шешімі болып табылады. Көлденең тұрақтылар бастапқы шарт арқылы анықталады:
![]()
c=r0 x v0 ,
немесе координаталық формада:
және т.б.
Бұл тапсырма басқа да қарапайым жолмен шешілуі мүмкін. Оны біз төменде қарастырамыз.
ҒА қозғалыс траекториясының теңдеуін шығарамыз, ол үшін r,v координаттарының полярлық жүйесін еңгіземіз. Аспандық дененің орналасуын орбита жазықтығындағы r радиус-векторымен (ҒА дан тартылыс орталығына дейінгі қашықтық), r радиус-векторы мен кейбір фиксирленген бағыттары арасындағы u полярлық бұрышымен анықтаймыз (3.5 суретті қара).

3.5 сурет – Координатаның полярлық жүйесі
Лаплас интегралы үшін (3.4) теңдеуді r-ге скалярлы көбейтеміз:
![]()
Векторлардың көбейту ережелеріне сәйкес түрлендіру арқылы аламыз:
f ![]() r
r ![]() cos(u)=-m
cos(u)=-m ![]() r +c2 .
r +c2 .
![]() координатасына және константаға
тәуелді r координатасын алып тастау арқылы аламыз:
координатасына және константаға
тәуелді r координатасын алып тастау арқылы аламыз:
![]()
Белгілейміз
![]()
Полярлы координаталардағы
(r, ![]() )
ҒА орбита теңдеуін аламыз:
)
ҒА орбита теңдеуін аламыз:
|
|
(3.7) |
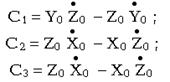
Бұл конустық қиылысу теңдеуі болып табылады. Конустық қиылысудың түрі қима жазықтықтың иілу бұрышынан конус осіне тәуелді. Бұлар төңірек, эллипс, парабола, гипербола болуы мүмкін (3.6 суретті қара). Алынған орбита теңдеуі Кеплердің бірінші заңын көрсетеді: орталық тартылыс өрісінде қозғалатын орбита денесі, фокустардың бірінде орталық дене орналасқан конустық қиылысы. e және p параметрлері – орбитаның эксцентриситет және фокальды параметрлері. Олар орбитаның пішіні мен көлемін анықтайды:
e = 0 кезде - шеңбер;
0 < e < 1 - эллипс;
e = 1 - парабола;
e > 1 - гипербола.
3.6 сурет - Конустық қима
Бұрыштық координата
![]() қозғалыстың
уақытымен байланысты болуы мүмкін.
қозғалыстың
уақытымен байланысты болуы мүмкін.
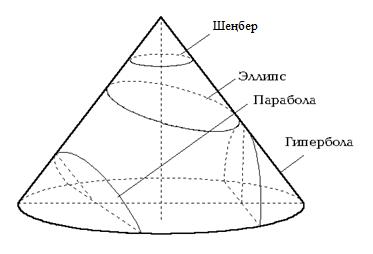
3.6 Эллипстік орбита
ҒА қозғалысын эллипстік орбита бойынша қарастырайық (3.7 суретті қара). АП эллипсінің үлкен диаметрі – үлкен ось немесе апсид сызығы деп, ал А және П шыңдары – апсид деп аталады. Үлкен оське перпендикулярлы және эллипс орталығы арқылы өтетін СД хордасы кіші ось деп аталады. Үлкен осьтің көлемі АП = 2a, кішінікі - СД = 2b. Математикалық өлшеулерде а және b үлкен және кіші жарты осьтердің көлемін пайдаланады. Апсид сызығында жатқан F1 және F2 нүктелері фокустар деп аталады.
r1 + r2 = const = 2a .
3.7 сурет – Эллипстік орбитаның элементтері
Кеплер заңына сәйкес тек эллипстің бір фокусы физикалық мәнге ие. Бұл F1 болсын. Осы фокусқа жақын П нүктесі орбитаның периорталығы деп, ал алшақтатылған А нүктесі апоорталық деп аталады. Егер Жер орталық дене болса, онда апсидалар перигей және апогей деп аталады.
F1F2=2c арақашықтығы фокусаралық қашықтық деп аталады.
![]()
Олай болса,
![]()
Апсида сызықтарына перпендикулярлы және фокус арқылы өтетін P1, P2 хордаларының жартысы эллипстің фокальды параметрі деп аталады:
P1P2 = 2p.
Фокальды параметр үлкен жартыосьпен келесі қатынаспен байланысты
p = a ![]() (1- e2) .
(1- e2) .
Периорталықтағы бағыт пен
ҒА радиус-векторы арасындағы бұрыш шынайы аномалия деп
аталады. Олай болса, Лаплас векторы орбита периорталығына
бағытталған. Эллипстік орбита бойынша ұшу кезінде тартылыс
орталығынан ҒА қашықтығы
периорталықтағы минимальды мәннен бастап өзгереді (![]() =
0°)
=
0°)
rP = a ![]() (1 - e)
(1 - e)
апоорталықтағы максимальды
мәнге дейін (![]() =180°)
=180°)
rа = a ![]() (1 + e).
(1 + e).
Орбита бойынша ҒА қозғалысының бұрыштық жылдамдығы тұрақты өлшем болмайды. Ол белгілі қатынастар бойынша анықталады:
![]()
мұнда ![]() - жергілікті
горизонтқа орбитальды жылдамдықтың қисаю
векторының бұрышы, немесе
- жергілікті
горизонтқа орбитальды жылдамдықтың қисаю
векторының бұрышы, немесе
![]()
Және перигейдегі максимальды
мәннен бастап өзгереді (![]() =0),
=0),
![]()
Апогейдегі минималды мәнге дейін
(![]() = 180°):
= 180°):
![]()
Бұл қатынастарда
![]() 0 –
орбита
бойынша ҒА қозғалысының орташа бұрыштық
жылдамдығы:
0 –
орбита
бойынша ҒА қозғалысының орташа бұрыштық
жылдамдығы:
![]()
Эллипстің аса маңызды сипаттамасы үлкен жарты ось болып табылады. Үлкен жартыосьтің көлемі орбитаның энергиясын анықтайды. Бұл қалыпты дәлелдеу үшін (3.6) қатынасты пайдаланайық:
f2 = m2 +c2 h
және тұрақты интегралдау арқылы эллипстің параметрлерінің теңдеуін
![]()
Бұл теңдеуді (3.6) қойып:
![]()
Бірақ P = a ![]() (1 - e2), олай болса,
(1 - e2), олай болса,
![]()
Осыдан
|
|
(3.8) |
Үлкен жартыосьтің көлемі жоғарылаған сайын, орбитаның энергиясы жоғары. 3.2 суретте үлкен жартыостердің көлемдері бірдей болғандықтан бірдей энергиялардың орбитасы бейнеленген. (3.8) теңдеуін энергия интегралына қойып, орбитаның әр нүктесінен ҒА қозғалыс жылдамдығын анықтайтын мына қатынасты аламыз.
|
|
(3.9) |
Олай болса, ҒА жылдамдығы периорталықтағы максимальды мәнге дейін өзгереді
![]() .
.
Апоорталықтың минималды мәніне дейін
![]()
3.7 Шеңберлік, параболалық және гиперболалық орбиталар
Эллипстік орбитаның жиі оқиғасы шеңберлік орбита болып табылады. Шеңберлік орбитаның ақиқатта іске асырылуы мүмкін емес. Шенберлік орбитаға жақын практикалық орбиталары Жер, Марс, Ай сияқты асапандық денелердің айналасында пайда болуы мүмкін. Оларды шеңберайналасының (квазишеңберлі) орбиталары деп аталады. Тапсырмалардың бірнешеуін шешкен кезде шеңберлік орбитаның теориясы қолданады. Шеңберлік орбитаны e=0 эксцентриситеті және p=a=r фокальды параметрі сипаттайды. Орбита бойынша қозғалатын жерсерік бірінші ғарыштық немесе шеңберлік жылдамдық деп аталатын жылдамдыққа тең.
![]()
Жылдамдық векторы мен ҒА радиус-векторының арасындағы бұрыш 90°қа тең, яғни ҒА жылдамдығы жергілікті горизонт бойынша бағытталған.
e=1
кезінде орбита параболалық болады. Оны эллипстік
орбитаның a=![]() жеке жағдайы ретінде қарастыруға
болады. Параболалық орбита шеңберлік сияқты дәл орындай
алмайтын арнайы орбитаның түріне жатады (3.8 суретті қара).
жеке жағдайы ретінде қарастыруға
болады. Параболалық орбита шеңберлік сияқты дәл орындай
алмайтын арнайы орбитаның түріне жатады (3.8 суретті қара).
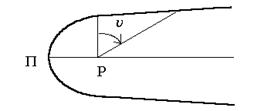
3.8 сурет – Параболалық орбита
Параболалық жылдамдығы бар аппарат тартылыс орталығына байланысты жеткілікті энергияға ие. Параболалық орбита бойынша қозғалыс кезіндегі бастапқы орбитаны параболалық жылдамдық деп атайды.
![]()
Гиперболалық орбита ҒА бір дененің тартылыс өрісін қалдырып, басқа тартылыс өрісіне өтеді. Ол e>1 кезінде орындалады (3.9 суретті қара).
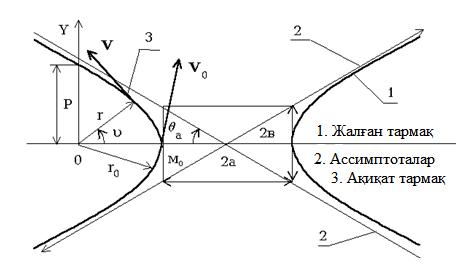
3.9 сурет – Гиперболалық орбита
Гиперболалық орбитаны іске асыру үшін V0 > V2 шартын орындау қажет.
Критерийдің энергетикалық жағынан қарағанда орбитаның түрін анықтау үшін кинетикалық энергиясы бар r қашықтығында кинетикалық энергияны шағару қажет.
![]()
h үшін тұрақты энергияның мәні:
шеңбер ![]()
эллипс h < 0 ;
парабола h = 0 ;
гипербола h > 0 .
Орбита жылдамдықтары:
шеңбер ![]()
эллипс ![]()
парабола
![]()
гипербола
![]() үшін
үшін
Шеңберлік және эллипстік орбиталар
бойынша қозғалатын ҒА энергиясы тартылыс өрісінен
өту үшін аз. Параболалық орбитада энергияның
артықшылығы нөлге тең, яғни ҒА тартылыс
өрісінен толық босатылу үшін энергияға ие. Әрекет
сферасының шекарасына ҒА нолдік жылдамдықпен келеді. Гиперболалық
орбитада ҒА үлкен кинетикалық энергияға ие, бұл
тартылыс өрісінен өту үшін қажет. Сондықтан ол
орталық өрістен «жұлынудан» кейін кейбір ақырғы
жылдамдықты сақтайды. Энергияның артықшылығы h![]()
![]() параболалық және гиперболалық орбиталардың энергия
айырмашылығын көрсетеді және мына түрде жазылады:
параболалық және гиперболалық орбиталардың энергия
айырмашылығын көрсетеді және мына түрде жазылады:
![]()
h көлемі планетааралық теорияда маңызды мәнге ие.
3.8 Геоцентрлік орбитаның элементтері
Орбита бойынша ҒА қозғалысын толық анықтау үшін оның кеңістіктегі орналасуын білу қажет. Жерлік тартылыс өрісіндегі ҒА қозғалысын білу үшін XYZ кординаталарының экваторлық геоцентрлік жүйесі қолданылады (3.10 суретті қара).
Орбита жазықтығымен экватор жазықтығының (ВН) қиылысуы сызығы түйіндер сызығы деген атқа ие. ҒА оңтүстік жартысферадан солтүстікке өтетін В нүктесі орбитаның көтерілетін түйіні деп аталады, ал қарама-қарсы нүкте – төмен түсетін.
Кеңістіктегі орбита
жазықтығының күйі екі бұрышпен:
![]() көтерілетін
түйіннің ұзақтығымен және орбитаның
қисаю жазықтығынан i экваторының
жазықтығына қиысуымен анықталады.
көтерілетін
түйіннің ұзақтығымен және орбитаның
қисаю жазықтығынан i экваторының
жазықтығына қиысуымен анықталады.
![]() көтерілетін түйіннің
ұзақтығы бұл сағат тіліне қарсы экватор
жазықтығындағы саналатын бұрыш. Бұл бұрыш 0°
ден 360°қа дейінгі шектерде өзгеруі мүмкін. i орбитаның
қисаюы бұл экватор жазықтығы мен орбита
жазықтығының арасындағы бұрыш. Ол 0° ден 180°қа
дейінгі шектерде өзгереді. i = 0° және i = 180° кезінде орбита
экваториалды деп, ал i = 90° кезінде полярлы деп аталады.
көтерілетін түйіннің
ұзақтығы бұл сағат тіліне қарсы экватор
жазықтығындағы саналатын бұрыш. Бұл бұрыш 0°
ден 360°қа дейінгі шектерде өзгеруі мүмкін. i орбитаның
қисаюы бұл экватор жазықтығы мен орбита
жазықтығының арасындағы бұрыш. Ол 0° ден 180°қа
дейінгі шектерде өзгереді. i = 0° және i = 180° кезінде орбита
экваториалды деп, ал i = 90° кезінде полярлы деп аталады.
Жазықтықтағы орбита
күйі перигей ![]() аргументімен анықталады. Перигей
аргументі 0° ден 360°қа дейінгі шектерде өзгереді.
аргументімен анықталады. Перигей
аргументі 0° ден 360°қа дейінгі шектерде өзгереді.
Жоғарыда көрсетілгендей,
орбитаның көлемі мен өлшемін а және е немесе р
және и элементтері анықтайды. ҒА-тың орбитада
орналасуын ![]() нағыз анамалиясы анықтайды.
нағыз анамалиясы анықтайды.
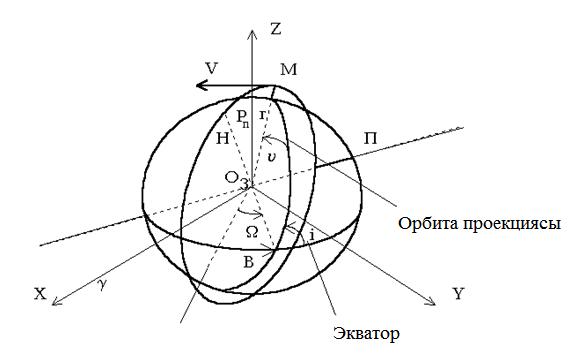
3.10 сурет – Координатаның геоцентрлік экваторлық жүйесі
Көбінесе ҒА-тың орбитада орналасуын анықтау үшін нағыз анамалияның орнына кеңдік аргументі қолданылады:
u =![]() +
+![]() .
.
u=90° и u=270° кезінде орбита нүктелері вертекстің жоғарғы және төменгі нүктелеріне сәйкес атқа ие.
Көрсетілген алты параметрдің
ішінен: ![]() , i,
, i,
![]() , a, e,
, a, e,
![]() - бесеуі орбитаны анықтайды, алтыншы u ҒА-тың
орбитада орналасуын анықтайды. Бұл бес параметр орбиталық
қозғалысты толығымен анықтайды. Олар орбитаның
параметрлері және элементтері деп аталады. Орбитаның параметрлері
тұрақты интегралдаудың туындылары арқылы алынады:
- бесеуі орбитаны анықтайды, алтыншы u ҒА-тың
орбитада орналасуын анықтайды. Бұл бес параметр орбиталық
қозғалысты толығымен анықтайды. Олар орбитаның
параметрлері және элементтері деп аталады. Орбитаның параметрлері
тұрақты интегралдаудың туындылары арқылы алынады:
![]()
![]()
![]()
![]()
![]()
Осыдан, тұрақты интегралданған С кеңістікте орбитаның жазықтығының орналасуын және орбита өлшемін анықтайды (р фокальді параметрі арқылы); Лапластың f векторы орбитаның өзінің кеңістігінде орналасуын (Лаплас векторы перигейге бағытталған) және е эксцентриситеті арқылы орбитаның формасын анықтайды. (3.11 суретті қара).
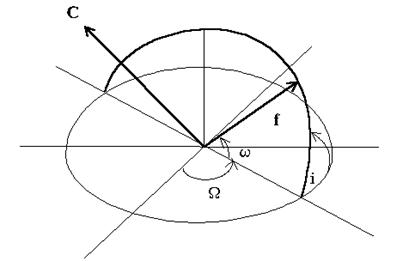
3.11сурет – Лаплас векторының кеңістікте орналасуы
Орбитаның параметрлерін біле отырып, ҒА-ның
координаттарын және орбитаның кездейсоқ нүктесінде
жылдамдықтын құраушы векторларын анықтауға
болады. Қозғалыстың бұрыштық сипаттамасы (![]() ) мен t уақыт арасындағы байланыс Кеплер теңдеуімен
анықталады.
) мен t уақыт арасындағы байланыс Кеплер теңдеуімен
анықталады.
Кеплер теңдеуінің жазылуы :
|
E-e sin( E )= M . |
(3.10) |
Е және М параметрлерінің физикалық мағынасын анықтау үшін 3.12 суретін қарастырамыз.
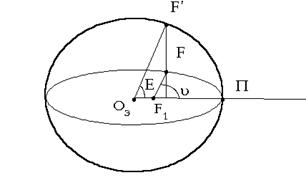
3.12 сурет – Е және М параметрлерінің физикалық мағынасы
Элиптикалық орбитада ҒА-ның орналасуы r радиус-векторымен және нағыз анамалиямен (F' нүктесі) анықталады. Оэ эллипсінің центрінен, үлкен жарты оське тең, радиус арқылы шеңбер жүргіземіз. F нүктесі арқылы үлкен оське перпендикуляр түзу жүргіземіз. Ол F нүктесінде шеңбермен қиылысады. Эллипстің үлкен осі (перигейге бағытталған) мен OF' радиусы арасындағы бұрыш эксцентрлік аномалия деп аталады және Е әрпімен белгіленеді.
![]() нағыз аномалиясы, геометриялық жағынан
қарағанда, E' эксцентрлік аномалиясымен мына қатынасымен
байланысты:
нағыз аномалиясы, геометриялық жағынан
қарағанда, E' эксцентрлік аномалиясымен мына қатынасымен
байланысты:
|
|
(3.11) |
Бұл М парамертрі, егер ол орбита
арқылы ![]() 0 орташа бұрыштық жылдамдықпен
біркелкі қозғалғандағы,
0 орташа бұрыштық жылдамдықпен
біркелкі қозғалғандағы, ![]() t =t1-t0 уақыт аралығында ҒА-ның
жүрген бұрыштық арақашықтығын
көрсетеді. Осыдан,
t =t1-t0 уақыт аралығында ҒА-ның
жүрген бұрыштық арақашықтығын
көрсетеді. Осыдан,
M = ![]() 0(t1 -t0).
0(t1 -t0).
t0 моменті ҒА-ның перигей арқылы өту моментіне сәйкес келеді. Егер санау басын орбитаның перигейі деп санасақ (t0 = tn= 0), онда
M = ![]() 0 t1.
0 t1.
Онда перигейде мына шарт орындалады
![]() =
E = M = 0,
=
E = M = 0,
Ал апогейде
![]() =
Е = М = 180° .
=
Е = М = 180° .
М бұрыштық сипаттамасы орташа аномалия немесе орташа қозғалыс деп аталады,
0° < ![]() < 180° кезінде, M <
E <
< 180° кезінде, M <
E < ![]()
180° < ![]() < 360° ал кезінде,
< 360° ал кезінде,
![]() < Е < М.
< Е < М.
Осыдан, t –ның қозғалу
уақыты, М орташа қозғалыс және Е эксцентрлік аномалия
арқылы ҒА-ның ![]() перигейден өткен
бұрыштық арақашықтығымен, байланысты:
перигейден өткен
бұрыштық арақашықтығымен, байланысты:
E - e ![]() sin(E)=
sin(E)=![]() 0 t .
0 t .
Бұл теңдеу трасценттік болып табылады, яғни аналитикалық шешімі жоқ және трансценттік теңдеулерді шешуді жақын әдістері арқылы шешіледі.
3.10 Кеплер заңдары
Тартылыстың центрлік өрісінде қарсы емес қозғалыстың динамикасын Кеплердің үш заңы сипаттайды. Олар Кеплермен құрылған және Ньютонның бүкіләлемдік тартылыс заңын жалпылауға негіз болды. Сондықтан сапан денелерінің қарсы емес қозғалысы кеплерлік деп те аталады. Кеплер заңдары келесідей құрылады.
Бірінші заң.
Тартылыс өрісінің центрінде қозғалып келе жатқан аспан денесінің орбитасында, конустық қима бар және оның фокустардың бірінде центрлік дене орналасқан. Бірінші заңның математикалық түрі орбитаның теңдеуі болып табылады. (3.7).
Екінші заң.
Аспан денесінің радиус-вектроры бірдей уақыт аралығында бірдей көлемін сипаттайды. Екінші заң көлемнің интегралымен математикалық сипатталады. (3.13 суретті қара) t1= t2 S1= S2 кезінде.
3.13 сурет – Кеплердің екінші заңы
Үшінші заң.
Аспан денелерінің айналу периодтарының квадраты олардың үлкен жартыосьтерінің кубтарына тең:

4 ҒА-тың ауытқыған қозғалысы
Алдындағы бөлімде ҒА-тың ауытқымаған (Кеплерлік) қозғалысы қарастырылған, яғни идеалды жағдайда – тек қана центрлік тартылыс күшінің өрісінде.
Негізінде ҒА қозғалысына басқа да күштер әсер етеді, центрлік тартылыс күшінен басқа. Бұл күштер негізделген:
- жердің нағыз кірісінің центрліктен айырмашылығымен;
- жердің атмосферасынің болуымен;
- айдың, Күннің және күн жүйесінің тартылысымен;
- жарық сәулелерінің қысымымен және басқа бірқатар себептермен.
Бұл күштер ауытқымалы және Кеплерлік қозғалыстан өзгешеліктерді туғызады. Ауытқу күштерімен ҒА қозғалысы ауытқығын қозғалыс деп аталады. Әдетте, тартылыстың центрлік күшіне қарағанда бұл күштер аз және бұдан ауытқыған қозғалыс ауытқымаған қозғалыстан қатынастар санымен өзгешеленеді. Баллистикалық есептерді шешкендегі әрбір жағдайларда қозғалыстың Кеплерліктен ауытқуын бағалау қажет.
Санау шарттарының программалық таңдауы үшін орбиталар параметрлеріне байланысты әртүрлі ауытқымалы күштердің әсерін және қозғалыстың негізгі заңдылықтарын анализдеу керек.
Берілген есеп ҒА-тың ауытқымалы қозғалысын зерттеу әдісі бойынша шешіледі.
4.1 ҒА-тың ауытқымалы қозғалысын зерттеудің негізгі әдістері
Ауытқымалы қозғалысын зерттеу әдістерін қарастырған кезде екі көрінісін қарастыру қажет: моделді көрсету формасы және қозғалыс моделінің сандық реализациялау әдісі.
Қозғалыс моделін көрсетудің арнайы формасын таңдауынан және оны іске асырудың әдісіне ауытқымалы қозғалысты есептеу жылдамдығы және нақтылығы байланысты.
ҒА-тың қозғалыс моделі кез келген КЖ-де көрсетілуі мүмкін.
Ньютонның екінші заңына сәйкес ауытқымалы қозғалыс моделі мына түрге ие:
![]()
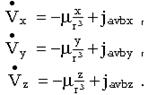
АСК осінде проекцияларда бұл моделді келесідей жазуға болады.
|
|
(4.1) |
осында - javbх, javby, javbz абсолютті КЖ осінде ауытқымалы тездетудің проекциялары. Жалпы жағдайда ауытқымалы қозғалыс жүйесі (4.1) математикалық көзқарасынан екінші ретті сызықты емес үш дифференциалдық теңдеулер жүйесін, әдетте аналитикалық шешімі жоқ, білдіреді.
Белгілеп
|
|
(4.2) |
(4.1) теңдеулер жүйесін былай жазуға болады:
|
|
(4.3) |
Бұл жүйені интегралдау үшін сол уақыт моментіне қозғалыстың бастапқы шарттарын (БШ) белгілеу қажет:
X(t0)=X0, Y(t0)=Y0, Z(t0)=Z0,
Vx(t0)=Vx0, Vy(t0)=Vy0, Vz(t0)=Vz0.
Жүйені интегралданған (4.3) не сандық, не жақын-анлитикалық, не сандық-аналитикалық әдістермен жүзеге асады. Жүйені (4.3) шешудің қай әдістерін болмасын таңдау талап етілетін нақтылықпен және оң боліктердің функционалдық тәуелділік түрімен анықталады.
Ауытқымалы күштердің жүйесін және интегралдау қадамын сәйкесінше таңдалған ҒА-тың ауытқымалы қозғалысының алгоритмін есептеу нақты және практикада кеңінен қолданылады. Алайда ол әртүрлі ауытқымалы күштердің әсер етуін сапалы анализдеу үшін ыңғайсыз. Біріншіден бұл соңғы аналитикалық формулаларды алумен байланысты, екіншіден бұл формулалар орбитаның бастапқы параметрлерінің әсерін анық көрсетпейді. Ауытқымалы қозғалысты сапалы анализдеу үшін, аспан механикасында оскулирленетін элементтердің әдісі деп аталатын, Лангранжтың кездейсоқ тұрақтыларын вариация әдісін бойынша қолдану ыңғайлы.
4.2 Оскулирлейтін элементтердің әдісі
Бұл әдістің арналуы бойынша,
әр уақыт моментінде өзгеретін, аспан денесін (немесе ҒА)
әрқашан конустық қима бойынша қозғалады деп
есептеуімізге болады. Басқа сөзбен айтқанда, ауытқымалы
қозғалысты есептеудің шешуі сол алты бірінші интегралдарымен
анықталады, ауытқымалы емес есептерді шешу сияқты,
бірақ орбита элеметнттері ![]() , i,
, i,
![]() , p, e, r тұрақты сияқты емес, ал
кейбір уақыттық функциялар сияқты қарастырылады:
, p, e, r тұрақты сияқты емес, ал
кейбір уақыттық функциялар сияқты қарастырылады:
i=i(t),
r=r(t) және т.б.
Орбита элементтері ауытқымалы қозғалыстың теңдеулері қанағаттандырылатындай анықталуы қажет. Механика жағынан қарағанда бұндай әдістің негізі ҒА-тың қозғалысының нағыз ауытқымалы траекториясының, уақыттың әр моментінде нағыз траекториямен тиісетін, көптеген орбиталарға (ауытқымайтын қозғалыстың траеториясы) ауысуында.
Ауытқымайтын қозғалыс орбиталарының айналып өтуі нағыз траектория болып табылады. Астрономияда жанасатын қисықтар оскулирленетін деп аталады, сондықтан ауытқымайтын қозғалыстың жоғарыда көрсетілген траекторияларын оскулирленетін орбиталар деп атайды, ал олардың элементтерін – оскулирленетін элементтер деп. Әдістің идеясы 4.1 суретте көрсетілген.
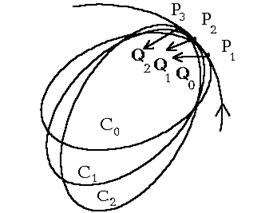
4.1сурет – Оскулирленетін элементтердің әдіс идеясы
Элементтері бастапқы шарттармен орындалған, С0 кеплерлік орбита бойынша қозғалып келе жатқан денеге Р1 нүктесіне ауытқымалы күш әсер етті делік. Күш іс-әрекеті импульсті деп есептейміз. Р1 нүктесінің орналасуы, жаңа бағыт және жылдамдық көлемі жаңа конустық қиманы анықтайды, және ол арқылы дене қандай да бір сыртқы күшпен ауытқымайынша қозғала береді. Дене жаңа С2 конустық қимаға ауысатын Р2 нүктесі болсын. Егер бұл шексіздікке дейін жалғаса берсе, онда дене уақыт аралығында ауытқымалы күштер әсерінен өзгеретін, конустық қима арқылы қозғалады. Ең шегінде импульстер үздіксіз ауытқымалы күшке өтеді және орбита барлық элементтері үздіксіз өзгеретін конустық қима болады.
Осыдан, оскулирленетін орбита, бұл қарапайым доғасы негізгі орбитаның қарапайым доғасымен сәйкес келетін орбитаны айтамыз. Дене осы қарапайым доғаны өтетін уақытты жанасу дәуірі деп аталады. Жанасу дәуірі барысында сәйкес келетін оскулирленетін конустық қиманы дененің орналасуын және жылдамдығын, жеткілікті нақтылық дәрежесімен анықтау үшін қолдануға болады. Егер берілген жанасу дәуірі барысында ауытқымалы күш жоғалып кетсе, онда оскулирленетін конустық қима осы моменттен нақты дене орбитасын көрсетеді.
Ауытқулар периодтық (уақыттың периодтық функциялары болып табылады) және ғасырлық (уақыт бойынша монотонды өсетін) болып бөлінеді.
Ауытқымалы қозғалыстың қасиеттерін білу үшін екі гипотезаны қолданамыз.
1 Есепті импульсті жағынан
қарастырамыз, яғни ауытқымалы қозғалыстың
әсер ету уақыты шексіз аз деп қарастырамыз. Онда
дененің орналасуының өзгеруін, ![]() t уақыт аралығында, ескермей-ақ
қоюымызға болады және мына теңдеумен анықталатын
ауытқымалы дененің қозғалысы лезде
t уақыт аралығында, ескермей-ақ
қоюымызға болады және мына теңдеумен анықталатын
ауытқымалы дененің қозғалысы лезде
![]() V көлеміне өзгереді деп есептеуімізге
болады.
V көлеміне өзгереді деп есептеуімізге
болады.
![]()
Егер ауытқымалы күшпен құрылған а тездетілуі тұрақты болса, онда
![]() V=a
V=a![]()
![]() t.
t.
2 Ауытқымалы күштер центрлік өрістің тартылыс күшінен әлдеқайда аз болғандықтан javb<<F, онда ауытқымалы күшті үш перпендикуляр бағытқа қоюға болады және әрбір компоненттің іс-әрекетін бөлек қарастыруға болады, содан соң шешімдерді біріктіреміз.
Орбита элементтерінің өзгеруін анықтау үшін ауытқымалы күшті шынайы үшшектік осьтері бойынша реттеу ыңғайлы. Тангенциалды jT және қарапайым jN күштері орбита жазықтығында жатыр, бинормальная jB –орбита жазықтығына перпендикуляр (4.2 суретті қара).
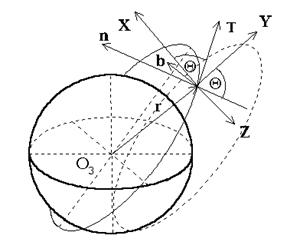
4.2 сурет – Табиғи үш шектік
4.3 Ауытқымалы күштер әсерінен орбита элементтерінің өзгеруі
4.3.1 Тангенциал ауытқымалы күштің әсері.
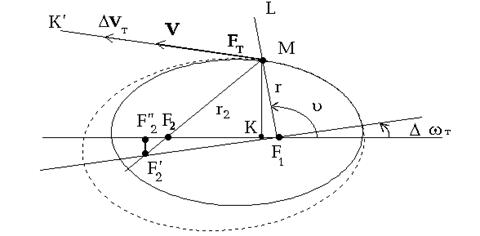
4.3 сурет – Тангенциал ауытқымалы күштің әсері
1 Эллипстің кез келген нүктесінен оның фокустарына шейін арақашықтық суммасы тұрақты көлем, оның үлкен осіне тең:
r+r2=2a=const.
2 Кез келген нүктесінде эллипске тиісуші, оның фокустарынан осы нүктеге жүргізілген радиус-векторлардан құрылған, сыртқы бұрыштың биссектрисасы:
![]() K'MF2=
K'MF2=![]() K'ML.
K'ML.
Жылдамдықтың өзгеруі эллипстің (эллипс интервалына сәйкес) үлкен осінің өзгеруіне әкеліп соғады, ал ол эллипстің бірінші қасиетінің (п.1) негізінде, М нүктесінен екінші фокусқа шейін арақашықтықтағы көлемге өзгертеді.
![]() r2=F'2F2.
r2=F'2F2.
Эллипстің екінші қасиетінен, М нүктесінен екінші фокусқа бағыт өзгерусіз болып қала береді, өйткені тангенциалды күш жылдамдық векторының бағытын өзгертпейді, осыдан тиісушінің орналасуын да өзгертпейді. Осының салдарынан фокус MF2 сызығы бойынша F'2 нүктесіне жылжиды (4.3 суретті қара), осыдан орбита эксцентриситетінің және апсид сызығының өзгеруіне әкеліп соғады.
Тангенциалды күштің әсерінен
a, e, ![]() орбита элементтерінің өзгеруі
үш қатынаспен көрсетіледі.
орбита элементтерінің өзгеруі
үш қатынаспен көрсетіледі.

4.3 суретті пайдалана отырып берілген қатынастарды құрамыз. Ньютонның екінші заңына сәйкес жылдамдық векторымен бағытталған (оң бағыт) тангенциалдық күш жылдамдық векторының модулін өзгертеді.
|
|
(4.4) |
Бұл кезде жылдамдық бағыты өзгерусіз қала береді.
Энергияның интегралын пайдалана отырып, тангенциалдық күштің әсері кезінде үлкен жартыосьті өлшеуді табуға болады.
|
|
(4.5) |
Эллипстің қасиеттеріне сәйкес dV жылдамдықтың өзгеруі da үлкен жартыосінің өзгеруіне әкеліп соғады, бірақ бұл кезде радиус-вектор r өзгермейді. Уақыт бойынша дифференциалдаймыз (4.5)
|
|
(4.6) |
![]() болғандықтан,
болғандықтан,
![]()
Ескере отырып
![]()
Қатынасын аламыз
|
|
(4.7) |
F2F'2F''2 және F2МК үшбұрыштар түрінен (4.3 суретті қара)
![]()
Осы кезде
MK=r![]() sin(180°-
sin(180°-![]() )=r
)=r![]() sin
sin![]() ,
,
F2M=r2=2a-r,
F2F'2=![]() r2=2da.
r2=2da.
F2K=2c-r![]() cos (180°-
cos (180°-![]() )=2c+r
)=2c+r![]() cos
cos![]() .
.
Үшбұрыштар түрін пайдаланып, аламыз

|
|
(4.8) |

![]()
Перигей аргументінің аз болғандықтан өзгеруінен оның мәнін тангенспен алмастыруға болады
Тангенсті тапқан кезде фокусаралық
арақашықтықты ескермеуімізге болады. Берілген
2dc өзгеруі
tg![]() (d
(d![]() ) көлемін өзгертпейді. Онда
) көлемін өзгертпейді. Онда
![]()
Берілгеннен туындылар мәніне келейік. (4.7) қоя отырып, мына қатынасты аламыз
|
|
(4.9) |
е=с/а эксцентриситет
мәнінен ![]() туындысы мына түрге ие:
туындысы мына түрге ие:
![]()
Дифференциалдарға өтсек, мынаны аламыз:
![]()
Бұл өрнекке (4.8) мәндерін қойсақ, мынаны аламыз:
![]()
![]()
(4.7)-ден de дифференциалынан туындыға ауысамыз
|
|
(4.10) |
Шыққан өрнектерді анализдеп, оларды ыңғайлы етіп алып, келесідей шешімдерді жасауға болады:
1) (4.7) өрнегінен туындысын тапқаннан кейін мынаны аламыз:
![]()
Берілген өрнектен эллипстің үлкен жартыосі dV импульсінің (FT күштері) оң бағыты кезінде, орбитаның қай нүктесінде импульс (FT күші) бар екеніне қарамастан өсе береді. Тангенциалды импульс (FT күші), жылдамдық векторына қарсы бағытталған, үлкен а жартыосьтің әрдайым азаюына акеледі. (4.4).
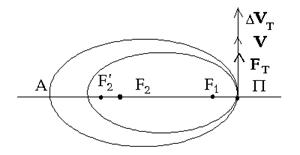
4.4 сурет – үлкен жартыосьтің тангенциалды күштің әсерінен өзгеруі
2) (4.9) өрнегінен, теңдікті қойып
![]() ,
,
Мынаны аламыз
![]()
немесе
|
|
(4.11) |
энергия интегралын пайдаланып, берілген өрнекті жеңілдетеміз
![]()
![]()
Теңдіктің оң және сол
жағын a![]() r көбейтіндісіне
r көбейтіндісіне
![]()
Бастапқы қатынасқа (4.11) қоямыз
![]()
Берілген өрнектен, оң импульс (FT
күші) кезінде, sin![]() >0 болғанда, яғни u
>0 болғанда, яғни u![]() [0,180°] (перигейден апогейге дейінгі
қозғалыс аумағында) перигей ҒА қозғалысы
жағына жылжиды – оң бағытта. Апогейден қозғалыс
аймағында, перигей ҒА қозғалысына қарсы
бағытта жылжиды, d
[0,180°] (перигейден апогейге дейінгі
қозғалыс аумағында) перигей ҒА қозғалысы
жағына жылжиды – оң бағытта. Апогейден қозғалыс
аймағында, перигей ҒА қозғалысына қарсы
бағытта жылжиды, d![]() <0, өйткені u
<0, өйткені u![]() [180°,360°] кезінде sin
[180°,360°] кезінде sin![]() >0. Апогей мен перигейде sin
>0. Апогей мен перигейде sin![]() =0 және тангенциалдық
ауытқу бұл нүктелерде аспид сызықтарының
бұрылуына әкеліп соқпайды.
=0 және тангенциалдық
ауытқу бұл нүктелерде аспид сызықтарының
бұрылуына әкеліп соқпайды.
3) (4.10) өрнегінен, ауыстыруды орындау
![]() ,
,
Мынаны аламыз
![]()
Қатынастарды анализдей отыра, de екі құраушысы болмайды деуге болады:
-периодтық, нағыз аномалиямен анықталатын;
-әрдайым орындалатын – ғасырлық құраушысы.
Ғасырлық құраушы әрқашан өседі, егер FT оң болса (dV>0), және қарама-қарсы ғасырлық құраушы әрқашан төмендейді, егер FT<0 (dV<0-импульсі ҒА-тың қозғалысына қарсы).
Периодтық құраушы косинус
графигі сияқты өзгереді, u![]() [270°,90°] кезінде
ол нөлден үлкен, u
[270°,90°] кезінде
ол нөлден үлкен, u![]() [90°,270°] кезінде
ол нөлден кем. Периодтық құраушының амплитудасы
ағымдағы V жылдамдығының және dV хабарланатын
импульс қатынасымен анықталады. ҒА-тың
эллиптикалық орбита бойынша қозғалысы кезінде тангенциалды
күштің әсері үлкен жартыось пен эксцентриситеттің
ғасырлық кетуіне әкеліп соғады. Перигей аргументі
периодтық ауытқуды зерттейді. Кеңістікте орбита
жазықтығының орналасуын анықтайтын
[90°,270°] кезінде
ол нөлден кем. Периодтық құраушының амплитудасы
ағымдағы V жылдамдығының және dV хабарланатын
импульс қатынасымен анықталады. ҒА-тың
эллиптикалық орбита бойынша қозғалысы кезінде тангенциалды
күштің әсері үлкен жартыось пен эксцентриситеттің
ғасырлық кетуіне әкеліп соғады. Перигей аргументі
периодтық ауытқуды зерттейді. Кеңістікте орбита
жазықтығының орналасуын анықтайтын
![]() және i орбита элементтері тангенциалды ауытқымалы
күш әсерінен өзгермейді.
және i орбита элементтері тангенциалды ауытқымалы
күш әсерінен өзгермейді.
4.3.2 Тангенциалды ауытқымалы күш әсері
Ауытқымалы күштің аз болуынан, ол орбиталы жылдамдықтын көлемін өзгертпейді, ал тек қана оның векторын орбита жазықтығында оны кейбір бұрышқа бұрады деп есептеуге болады. Осыдан, орбитаның үлкен жартыосі өзгерусіз қала береді, ал жылдамдық векторының бұрылу бұрышы мына қатынаспен анықталады:
|
|
(4.12) |
![]()
болғандықтан
онда
![]()
Эллипстің бірінші қасиетінен, күш нүктесінен екінші фокусқа шейін арақашықтық өзгермейді (а=const, r=const), ал екінші қасиетінен – екінші фокусқа бағыт мына бұрышқа бұрылу керек:
![]() = -2d
= -2d![]() .
.
Бұл r2 радиусының М нүктесі
бойынша ![]() = -2d
= -2d![]() бұрышына бұрылуына әкеліп
соғады, ал осыдан орбита эксценситритетінің және аспид
линияларының орналасуының өзгеруіне де.
бұрышына бұрылуына әкеліп
соғады, ал осыдан орбита эксценситритетінің және аспид
линияларының орналасуының өзгеруіне де.
![]() бұрышы өзгергендіктен, эксцентриситет
өзгереді.
бұрышы өзгергендіктен, эксцентриситет
өзгереді.
![]()
![]() және
және
![]() элементтерінің өзгеруі екі
қатынаспен сипатталады;
элементтерінің өзгеруі екі
қатынаспен сипатталады;
1 ![]()
2![]()
Берілген қатынастарды шығарамыз.
F фокусы жылжитын шеңбер доғасын берілген шеңберге F2 нүктесінде жанасатынға ауыстырамыз. Бұдан (4.5 суретті қара)
![]()
мұндағы - r2
бұрылысының ![]() шеңбер радиусы. Осы жағдайда F2
F'2 F''2 және F2MK үшбұрыштары .
шеңбер радиусы. Осы жағдайда F2
F'2 F''2 және F2MK үшбұрыштары .
Үшбұрыштар ұқсастығынан
 .
.
Осы кезде.
![]() MK
MK![]() =r
=r![]() sin
sin![]()
![]() MF2
MF2![]() =r2 ,
=r2 ,
![]() KF2
KF2![]() =2c+r
=2c+r![]() cos
cos![]() ,
,
![]() F2F'2
F2F'2![]() =-2r2 d
=-2r2 d![]() , d
, d![]() <0
<0
болғандықтан
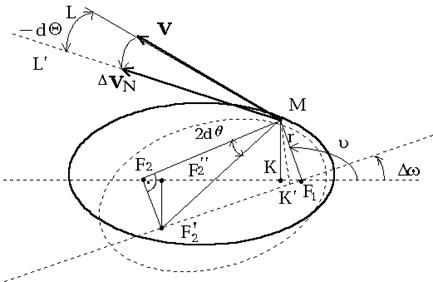
4.5 сурет – Қалыпты және ауытқымалы күштің іс-әрекеті
Осыдан
![]()

Аспид сызықтарының бұрылу бұрышы өте аз екенін ескере отырып, былай жазамыз

(4.4) қолдана отырып, бірінші қатынасты былай деп жазамыз
![]()
4.5 суреттен, фокусаралық
қашықтығынық өзгеруі
![]() қиығына тең
қиығына тең
![]()
Бұрын көрсетілген de дифференциалының қатынасын қолданамыз
![]()
da=0 болғандықтан, онда үлкен жартыось бүл жағдайда өзгермейді. Нәтижесінде, соңғы өрнекке (4.4) қоя отырып, мынаны аламыз
![]()
Бұл екінші қатынас. Анализ үшін ыңғайлырақ түрде жазып алайық.
![]() болғандықтан, онла:
болғандықтан, онла:
1 ![]()
2 ![]()
dVN (FN күші) оң импульс, ішке бағытталған, ҒА (dV>0) қозғалысына бағытталған перигейдің ғасырлық кетуіне бағытталған және косинустар заңы бойынша өзгеретін перигейдің периодтық құраушысы ось жағдайда, 2ае=2с фокусаралық арақашықтық аз болса, яғни орбита шеңберге жақын болады.
Орбита эксцентриситетінің dVN (FN күші) қалыпты импульс әсерінен өзгеруі периодтық сипаттамаға ие.
![]() және i орбита элементтерінің өзгеруі FN қалыпты
күш әсерінен өзгермейді, өйткені FN күші орбита
жазықтығына жатады
және i орбита элементтерінің өзгеруі FN қалыпты
күш әсерінен өзгермейді, өйткені FN күші орбита
жазықтығына жатады
Осыдан, тангенциалды және қалыпты
күштер перигейдің ![]() өту уақытын өзгеруіне
әкеліп соғатыны көрініп тұр, өйткені
соңғысы d
өту уақытын өзгеруіне
әкеліп соғатыны көрініп тұр, өйткені
соңғысы d![]() бұрышына орбитаның
ағымдағы нүктесіне қатысты жылжиды. Ауытқымалы
күштерге байланысты бұл элементтің өзгеруін анық
формада көрсету мүмкін емес. Сондықтан оның орнына
нағыз аномалияның бастапқы мәнін алады. Оның
өзгеруін біле отыра,
бұрышына орбитаның
ағымдағы нүктесіне қатысты жылжиды. Ауытқымалы
күштерге байланысты бұл элементтің өзгеруін анық
формада көрсету мүмкін емес. Сондықтан оның орнына
нағыз аномалияның бастапқы мәнін алады. Оның
өзгеруін біле отыра, ![]() өзгеруін эксцентрикалық аномалия
арқылы және Кеплер теңдеуі арқылы табуға болады.
өзгеруін эксцентрикалық аномалия
арқылы және Кеплер теңдеуі арқылы табуға болады.
Нағыз аномолияның бастапқы мәнінің өзгеруі перицентрдің аргументінің өзгеруіне байланысты
d![]() 0=-d
0=-d![]() .
.
Тангенциалды және қалыпты
ауытқымалы күштердің әсерінен оның суммалық
өзгеруін анықтау үшін, ![]() өрнектің оң жағын
суммарлау жеткілікті:
өрнектің оң жағын
суммарлау жеткілікті:
![]()
4.3.3 Бинормал ауытқымалы күш әсері.
Нәтижесінде бинормал ауытқымалы
күш әсері ҒА жылдамдық векторы d![]() бұрышына бұрылады, осыған тең
бұрышына бұрылады, осыған тең
|
|
(4.13) |
![]()
болғандықтан
Онда
![]()
Ауытқымалы күштің аз болуынан, бинормал күштің әсері көлем мен жылдамдық векторының шамасын және көлбеуін өзгертпейді деп есептеуге болады, осыдан орбитаның үлкен жартыосі өзгермейді.
Орбитаның екінші фокусының тарту центріне қарағанда өзгерусіз қала береді. Бұл бинормал күші орбита эксцентриситетінің өзгеруіне әкелмейді дегенді білдіреді:
a=const, e=const .
i, ![]() ,
, ![]() орбита элементтері өзгереді.
4.6 суретте көрсетілген, теңдеулері
қолданып, орбита элементтерінің мәндердің
өзгеруін анықтау үшін қолданамыз:
орбита элементтері өзгереді.
4.6 суретте көрсетілген, теңдеулері
қолданып, орбита элементтерінің мәндердің
өзгеруін анықтау үшін қолданамыз:
4.6-сурет – Бинормал ауытқымалы күш әсері
V![]() = cos
= cos![]() , dVв
, dVв ![]() Vd
Vd![]() , dVв
, dVв ![]() V
V![]() d
d![]() .
.
Онда
Vd![]() '=V
'=V![]() db=Vcos
db=Vcos![]() d
d![]() .
.
осыдан мынаны аламыз
![]()
d![]() - r
ағымдығы радиусына қатысты орбита
жазықтығының бұрылу бүрышы.
- r
ағымдығы радиусына қатысты орбита
жазықтығының бұрылу бүрышы.
(4.13) ескере отырып, мынаны аламыз
|
|
(4.14) |
Алымын мен бөлімін
(4.14) r-ге көбейтеміз. Fв![]() r-ге тең алымы Жер центріне қатысты
бинормал күшінің М моментін білдіреді. mVcos
r-ге тең алымы Жер центріне қатысты
бинормал күшінің М моментін білдіреді. mVcos![]() -ге тең бөлімі К-ның орбиталы
қозғалысының, К=I
-ге тең бөлімі К-ның орбиталы
қозғалысының, К=I![]() -ге тең, кинетикалық моменті болып
табылады, осында бұрыштық жылдамдық бар, ал ҒА-тың
инерция моменті Жердің центріне қатысты I=mr2 тең. Осыдан:
-ге тең, кинетикалық моменті болып
табылады, осында бұрыштық жылдамдық бар, ал ҒА-тың
инерция моменті Жердің центріне қатысты I=mr2 тең. Осыдан:
![]()
(4.14) формуласын мына түрде жазуға болады:
![]()
яғни ол, М сыртқы моментінің, К-ға перпендикуляр, әсеріндегі К кинетикалық моментімен гироскоптың қалыпты прецессияның бұрыштық жылдамдығын білдіретін, формула түріне ие. Орбиталды қозғалыстың бұл қасиеті бірқатар жағдайларда, күрделі матеметикалық есептеулерді қолданбай, жеткілікті сапалы көріністі алуға мүмкіндік береді
ҒА-тың жазықтықтағының орналасуы тәуелді, орбита элементтерінің өзгеруін анықтау үшін ОД және ОЕ (4.7 суретке қара) бағыттарына бұрыштық жылдамдықты жіктейміз.
4.7 сурет – бинормал құраушы әсерінен орбита элементтерінің өзгеруі
![]() OE құраушысы көлбеудің
өзгеруінің жылдамдығы.
OE құраушысы көлбеудің
өзгеруінің жылдамдығы.
|
|
(4.15) |
ОД бағыты
бойынша құраушысы тура шығу мен перигей аргументінің
өзгеруін алып келеді. ![]() OD-ны
шығыс түйінің бұрыштық жылдамдығына
жіктейміз және орбита перигейінің қозғалыс
жылдамдығына. Ол үшін
4.8-ке
қарайық.
OD-ны
шығыс түйінің бұрыштық жылдамдығына
жіктейміз және орбита перигейінің қозғалыс
жылдамдығына. Ол үшін
4.8-ке
қарайық.

4.8 сурет – орбитаның бастапқы түйіннің және перигейдің орнының ауысуы
4.8 суреттен
![]()
және
![]()
(минус таңбасы перигей қарсы бағытта жылжитынын көрсетеді, яғни ҒА-тың қозғалысына қарсы).
![]()
Осыдан аламыз
|
|
(4.16) |
|
|
(4.17) |
Біз Перигей аргументінің және тура шығыс иілулерінің өзгерісін анализдеу мүмкіндігін беретін (4.15), (4.16), (4.17), үш қатынас алдық.
(4.14) алатынымыз:
![]()
Берілген теңдеулерді қолдана отырып, (4.15), (4.16), (4.17) қатынастарындағы дифференциалдарға көшеміз.
![]()
Отсюда следует:
![]()
![]()
![]() ,
,
![]()
![]()
ДОС
және ТК орналасқан шеңберлі алмақты орбита
үшін V![]() проекциясы (горизонт жазықтығындағы
V
жанамасы) мәні аса қатты өзгермейтін
V
жылдамдығының мәніне жақын. Осыдан қорытынды
жасасақ, di, d
проекциясы (горизонт жазықтығындағы
V
жанамасы) мәні аса қатты өзгермейтін
V
жылдамдығының мәніне жақын. Осыдан қорытынды
жасасақ, di, d![]() , d
, d![]() өзгерістері периодтық
сипаттамаға ие. Иілу cos u заңы бойынша, ал
өзгерістері периодтық
сипаттамаға ие. Иілу cos u заңы бойынша, ал
![]() және
және
![]() sinu заңы бойынша өзгереді.
Сонымен қатар ескеретініміз, dVB импульсі (FB күші)
өзінің таңбасын sin u функциясы сияқты өзгертетін
болса, онда шығыс түйіннің және перигей аргументі
ұзақтығының өзгеруі 1 орамда нөлдік
болмайды және бір орамнан екінші орамға жинала береді. Жартылай
орамның u
sinu заңы бойынша өзгереді.
Сонымен қатар ескеретініміз, dVB импульсі (FB күші)
өзінің таңбасын sin u функциясы сияқты өзгертетін
болса, онда шығыс түйіннің және перигей аргументі
ұзақтығының өзгеруі 1 орамда нөлдік
болмайды және бір орамнан екінші орамға жинала береді. Жартылай
орамның u![]() [0,
[0, ![]() ] интервалында косинус өз таңбасын
өзгерткендіктен бір орамдағы иілулердің өзгерісі dVB
(немесе FB күштері) импульсінің мұндай өзгерісі кезінде
нөлдік болады.
] интервалында косинус өз таңбасын
өзгерткендіктен бір орамдағы иілулердің өзгерісі dVB
(немесе FB күштері) импульсінің мұндай өзгерісі кезінде
нөлдік болады.
4.4 Оскулирлейтін элементтер теңдеулері
Алынған теңдіктер негізінде ауытқымалы күштің әсері бар шынайы үшбұрыштық осьтері бойымен жайылып қойылған орбитаның Оскулирлейтін элементтері үшін дифференциалдық теңдеулерді жазуға болады. Ол үшін шынайы үшбұрыштықтың ауытқымалы күшінің әрбір проециясы үшін жоғарыда келтірілген кеплерлік элементтерге сәйкес дифференциялдық теңдеулерді қосамыз.
|
|
(4.18) |
Берілген теңдеулерде шынайы аномалияны қолдана отырып, жалғыз айнымалыға көшу ыңғайлы.
![]()
екенін ескерсек,
мұндағы ![]() - ҒА қозғалысының лездік
орбиталды бұрыштық жылдамдығы,
- ҒА қозғалысының лездік
орбиталды бұрыштық жылдамдығы,
төмендегідей мәндер енгіземіз:
![]()
C=(1-ecos![]() ),
),
D=1+e2,
G=1-e2,
H=3+e2,
![]()
Радиусы а дөңгелек орбита бойымен ҒА қозғалысының бұрыштық орбиталдық жылдамдығы келесідей формуламен есептелінеді:
![]()
алдыңғы келтірілген теңдеулерден алатынымыз
C=rVcos![]() ,
,
![]()
![]()
![]()
осыдан
![]()
Бұл теңдеуді дәлелдесек,

![]()
(4.18) жүйесін - бір айнымалылы u (шынайы аномалия) дифференциалдық теңдеулер жүйесі түрінде жазамыз:
|
|
(4.19) |
Әдетте,жерсерік орбитасына әсер ететін негізгі ауытқымалы күштер орбиталы КЖ-де беріледі. Сондықтан (4.19) теңдеуінде орбиталы КЖ ауытқымалы күштерге көшу ыңғайлы. Ол үшін 4.9 суретін және содан алынған келесі теңдеулерді қолданамыз:
|
|
(4.20) |
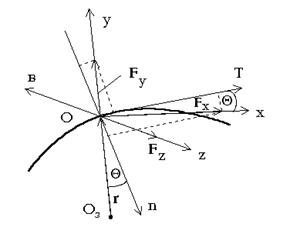
4.9 сурет - СК орбиталында ауытқымалы күштердің әрекеті
![]()
және
![]()
Онда (4.20) теңдеулерін мына түрде жазуға болады:
|
|
(4.21) |
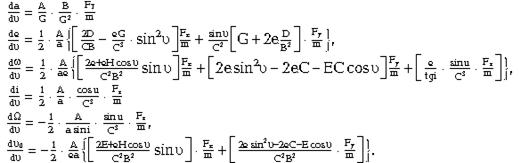
Бұл теңдеулер ҒА-тың ауытқымалы қозғалысын зеттеу кезінде қолданылады.
4.5 Ауытқымалылық әсерінен орбиталды жылдамдық құраушысының өзгерісінің теңдеулері
Орбиталды қозғалысты болжаммен зерттеген кезде, орбиталды қозғалыстың модельдеу уақыты 3 орамнан аспайды, ол жіберу қатарын жасауға мүмкіндік береді, ал ол өз кезегінде орбиталды қозғалыс формулаларын едәуір ыңғайлы түрде шығаруға мүмкіндік береді. Берілген теңдеулер келесі жолмен алынады.
ҒА координатасының орбиталды жүйеде аудан интегралының векторы, радиус-векторы, жылдамдығы мен туынды жылдамдығы келесі түрде жазылады:
C=(0, 0, С);
r=(0, r, 0);
V=(VX, VY, 0);
![]() =(fX, fY, fZ),
=(fX, fY, fZ),
мұндағы f = (fX, fY, fZ) – ауытқымалы және басқарушы жылдамдықтардың қосынды векторы.
Аудандар интегралының туындысы келесі түрде есептелінеді:
![]()
немесе скаляр формада
|
|
(4.22) |
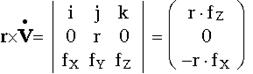 .
.Ауытқымалық әсерінен аудан интегралының көлемі өзгеріске келеді. Бұл өзгерісті сипаттайтын теңдеу түрі мынадай:
![]() ,
,
мұндағы ![]() -
нөлдік
уақыт моментіндегі аудан интегралының мәні. Скаляр формада
бұл теңдеу:
-
нөлдік
уақыт моментіндегі аудан интегралының мәні. Скаляр формада
бұл теңдеу:
|
|
(4.23) |
 .
.(4.22) және (4.23) теңдеулерінен алатынымыз:
|
|
(4.24) |
|
|
(4.25) |
|
|
(4.26) |
(4.25)
теңдеуінен
![]() x=0
екенін көреміз. С=r x Vи p=C2/
x=0
екенін көреміз. С=r x Vи p=C2/![]() екені белгілі болғандықтан, онда
екені белгілі болғандықтан, онда
![]() .
.
Бұл теңдіктен туынды алып, келесіні аламыз:
![]() .
.
(4.26) теңдеуін және ![]() екенін ескере отырып, мынаны аламыз:
екенін ескере отырып, мынаны аламыз:
|
|
(4.27) |
ҒА-тың жазық айналмалы қозғалысының теңдеуі келесі түрде жазылады:
![]()
(4.25) ескере отыра, соңғы теңдеудің скаляр формада жазылуы:
 .
.
Сонымен, жергілікті горизонт жазықтығында жататын туынды жылдамдықтың құраушысы үшін мына теңдікті жазуға болады:
|
|
(4.28) |
Жергілікті вертикаль бойымен бағытталған туынды жылдамдықтың құраушысы үшін fy үдеу құраушысын екіге бөлеміз:
![]() -
орталық ньютондық
тартылыс өрісінің гравитациялық жылдамдығының
құраушысы;
-
орталық ньютондық
тартылыс өрісінің гравитациялық жылдамдығының
құраушысы;
f2y – қалған ауытқымалылар.
Онда алатынымыз:
![]()
немесе
|
|
(4.29) |
(4.27), (4.28), (4.29) теңдеулері ауытқымалылық әсерінен орбита бойымен ҒА қозғалысын сипаттайтын дифференциалдық теңдеулер жүйесін құрайды. Берілген теңдеулер жүйесі бірінші реттік жүйе болып табылады. Ол жер алмағы маңайында қозғалатын ҒА-тың орталық массына әсер ететін кез келген ауытқымалылықты жеткілікті қарапайым түрде есептеуге мүмкіндік береді.
4.6 Жердің гравитациялық өрісінде ҒА-тың ауытқымалы қозғалысы
ҒА-тың ауытқымалылығы
жоқ (кеплерлік) қозғалысы тек ҒА-қа бір
ғана күштің – Жердің тартылыс күшінің
әсер етуімен ғана іске асады. Алда
п. 1.5-те ескерілгендей сфералық Жердің
күштік функциясы бар U=![]() /r. Осы бөлімде сфероидалық
Жердің де күштік функциясы келтірілген. Бұл модель практикада
жиі қолданылады және бірнеше орама аралығында ҒА
қозғалысын математикалық модельдеу үшін гравитациялық
өрістің жеткілікті жақындауы болып табылады:
/r. Осы бөлімде сфероидалық
Жердің де күштік функциясы келтірілген. Бұл модель практикада
жиі қолданылады және бірнеше орама аралығында ҒА
қозғалысын математикалық модельдеу үшін гравитациялық
өрістің жеткілікті жақындауы болып табылады:
|
Uсфероид = |
(4.30) |

(4.30) жақшаны ашсақ,
сфероидалық
Жердің күштік функциясы екі құраушыдан тұратынын
көреміз: сфералық Жердің күштік функциясынан
- Uц=![]() және Жер жағынан гравитациялық
ауытқымалықты сипаттайтын күштік функциядан -
және Жер жағынан гравитациялық
ауытқымалықты сипаттайтын күштік функциядан -
Upro=![]()
Гравитациялық ауытқымалық
дегеніміз ![]() - бұл ҒА-қа
оның қозғалысын кеплерліктен ажырата отырып әсер ететін
ауытқымалы жылдамдату.
- бұл ҒА-қа
оның қозғалысын кеплерліктен ажырата отырып әсер ететін
ауытқымалы жылдамдату.
Күштік функцияның
қасиеттерін пайдалана отырып, уытқымалы жылдамдатуды табамыз. Кез
келген бағыт бойымен Upro-дан туынды ауытқымалы
үдеудің берілген бағытқа проекциясы бар. lr, l![]() и l
и l![]() бірлік векторлармен табылатын
бағыттарды қарастырамыз. (4.10 суретті
қара).
бірлік векторлармен табылатын
бағыттарды қарастырамыз. (4.10 суретті
қара).
4.10 сурет – Гравитациялық ауытқымалы үдету
Таңдалған бағыттарға
![]() проекциясын есептеу үшін әр
таңдалған бағыт бойынша туынды аламыз:
проекциясын есептеу үшін әр
таңдалған бағыт бойынша туынды аламыз:
![]()
мұндағы Р20(sin![]() )=3 sin2
)=3 sin2![]() -1;
-1;
![]()
![]()
![]()
Табылған үдеуден орбиталы КЖ осьінің проекциясындағы үдеуге көшеміз.
4.10 суретті қарастырамыз
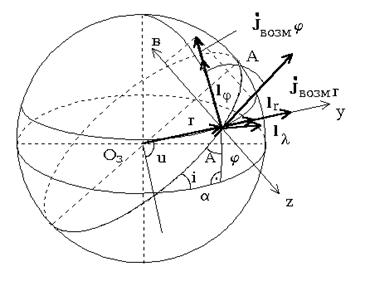
4.11 сурет – ОКЖ-дегі гравитациялық ауытқымалы үдеулер
Суреттен алатынымыз:
|
|
(4.31) |
мұндағы А - ағымдағы азимут.
АВС тікбұрышты сфералық үшбұрышты шеше отырып, sinA және cosA-ны көрсетеміз. Ережеге сәйкес, сфералық үшбұрыштар үшін қолданылатын 4.12 суретте көрсетілген элементтердің кез келген бесеуі үшін
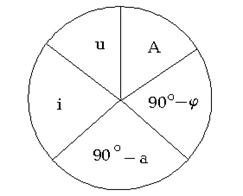
4.12 сурет – ОКЖ-дегі гравитациялық қарсы үдеулер
(тік бұрыш алынып тасталады, ал катеттердің орнына 90°қа дейін олардың толықтырулары қаралады) қатынас орындалады:
1) кез келген элементтің косинусы екі қарама-қарсы жатқан элементтердің синустарының туындысына тең;
2) кез келген элементтің синусы тиісті элементтердің котангенстерінің туындысына тең.
Бірінші теңдіктің негізінде
cos(i)=sin(A)![]() sin(90-
sin(90-![]() )=sin(A)
)=sin(A)![]() cos(
cos(![]() )
)
осыдан,
![]() ,
,
cosA=sin(i)![]() sin(90-a)=sin(i)
sin(90-a)=sin(i)![]() cos(a),
cos(a),
cosU=sin(90-a)![]() sin(90-
sin(90-![]() )=cos(a)
)=cos(a)![]() cos(
cos(![]() ),
),
![]()
Сонда, ![]()
Сфералық үшбұрыштан шығатыны:
cos(90-![]() )=sin
)=sin![]() =sin(u)
=sin(u)![]() sin(i).
sin(i).
Белгіленген теңдіктерді қолдана отырып, (4.31) басқа түрде жазамыз:
![]()
![]()
![]()
![]()
![]()
Табылған ауытқымалылардың әсерінен (4.21) дифференциалдық теңдеулер жүйесін шешу бір орамдағы уақыт бойынша оскулирленген элементтердің өзгеріс графиктерімен берілген. (4.13, 4.14, 4.15, 4.16, 4.17, 4.18, 4.19, 4.20, 4.21, 4.22, 4.23, 4.24 суреттерінде). Сонымен қатар мұнда орбиталы КЖ осінің бойымен ҒА-қа әсер ететін қарсылықтардың өзгерістерінің графиктері келтірілген. Есептеулер 1992ж мамырына қатысты «МИР» станциясының (биіктігі ~ 400 км) шеңбер алмақты орбитасы үшін жасалған. ҒА қозғалысы орбитаның шығыс түйінінен басталады.
Ауытқыма анализі ҒА-тың
кеңдік аргументінің өзгеруімен синус заңы бойынша
![]() бинормалды жылдамдықтың өзгеретінін
көрсетеді. Бинормалды ауытқымалының мұндай өзгеру
сипаттамасы орбита прецессиясына әкеледі.
бинормалды жылдамдықтың өзгеретінін
көрсетеді. Бинормалды ауытқымалының мұндай өзгеру
сипаттамасы орбита прецессиясына әкеледі.
|
4.13 сурет – Орбитаның үлкен жартыосінің өзгерісі |
4.14 сурет – Фокальды параметр өзгерісі |
|
4.15 сурет – Иілудің өзгерісі |
4.16 сурет – Эксцентриситет өзгерісі |
4.17 суреттен прецессияның вектік құраушысымен қатар түйіндер жолының өзгерістерінің периодтық құраушысы бар. Бір орамдағы периодтық құраушы шығыс түйіннің күйін өзгертпейді. Түйін жолдарының шешімдеуші прецессиясын вектік құраушы анықтайды. Бір орам ішіндегі тура шығыстың вектік кетуін есептеу үшін аналитикалық формула келтіреміз:
|
|
(4.32) |
мұндағы i0 , P0 – оборот басындағы фокальды параметрдің және иілудің мәні;
RE=6378140 м; С20=-0,00109808.
|
4.17 сурет – Шығыс түйін ұзақтығының өзгерісі |
4.18 сурет – Перигей енінің аргументінің өзгерісі |
ОКЖ-нің үш осі бойынша
қарсылықтың біріккен әрекеті перигейдің
күйінің өзгеруіне әкеледі. Дос орбитасы
кішігірім эксцентриситетке ие (сурет
4.18) келтірілген графикте
оның фонында да периодтық тербелістер амплитудасы үлкен
және белгілі бір орынға ие, бір орамда
![]()
![]() vec
vec
![]() 0,13° құрайтын перигейдің вектік
кетуі байқалмайды.
0,13° құрайтын перигейдің вектік
кетуі байқалмайды.
Перигейдің вектік кетуін есептеудің аналитикалық формуласы
|
|
(4.33) |
(4.33) формуладан көретініміз, егер көбейткіш (1-5cos2 i0)=0 болса, онда вектік кетуі қатыспайды. Осыдан cos i0=1/5, i0=63°26' немесе 116°34'.
Есептелген иілулер перигей аргументінің тек периодтық тербелістерімен ғана сипатталады және осы иілулер кезінде перигейдің вектік кетулері қатыспайды.
Мына интервалға тиісті иілулер кезінде:
i![]() [0
[0 ![]() 63° 26'] – перигей ҒА ұшуымен кетеді,
63° 26'] – перигей ҒА ұшуымен кетеді,
i![]() [116° 34'
[116° 34' ![]() 180°] –
(оң бағытта),
180°] –
(оң бағытта),
i![]() [63°26'
[63°26' ![]() 116°34'] – перигей ҒА ұшуына қарсы вектік
116°34'] – перигей ҒА ұшуына қарсы вектік
кетулер жасайды.
Берілген жайт физикалық түрде түсінікті. Жер полюстермен қысылып тұрғандықтан, экваториалды облыс жағынан ҒА-қа «тартылыс шығыны» әсер етеді.
|
4.19 сурет – ҒА кеңдік аргументінің өзгерісі |
4.20 сурет – Шынайы аномалияның өзгерісі |
Егер ҒА берілген экваториалды облыста үлкен бөлікпен қозғалыс жасаса (кішігірім иілулер кезінде), онда ҒА-қа әрдайым ҒА қозғалысы бойынша апсид сызығын бұрылуға мәжбүрлейтін, орбита ішіне бағытталған (4.5 суретті қара), оң бірқалыпты жылдамдық әсер етеді.
Егер ҒА өзінің жолының
көп бөлігін Жердің полярлық облыстарында жасаса, онда
полярлық облыстарда (Жер-сферамен салыстырғанда) оған "тартылыс
жеткіліксіздігі" әсер етеді. Мұндай орбиталар кейбір
қиылысуларда i![]() [90-
[90-![]() , 90 +
, 90 +![]() ] иілулер болған кезде мүмкін
болады.
] иілулер болған кезде мүмкін
болады.
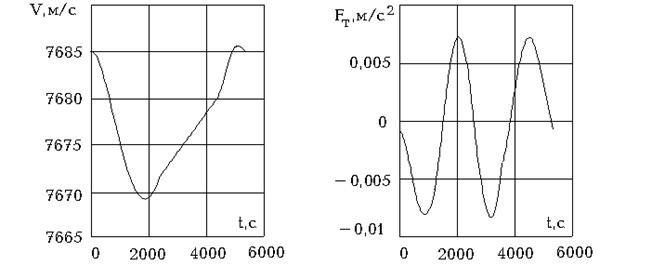
|
4.21 сурет – ҒА жылдамдығының өзгерісі |
4.22 сурет – Тангенсалды қарсылық өзгерісі |
"МИР" станциясы үшін орамның үлкен бөлігі ҒА қозғалысы бойынша (перигей) апсид сызығын бұратын оң бірқалыпты жылдамдық әсерінен өтеді.
Тек периодтық тербелістер ғана a, P, e, i параметрлерін іске асырады.
Үлкен жартылай ось ҒА-тың толық механикалық энергиясын анықтайды. Жердің гравитациялық өрісі ҒА-тың толық механикалық энергиясын өзгертпейтіндіктен - орбитаның геометриялық өлшемдері өзгермейді. Р және а өзгерісі тек потенциалдық энергияның кинетикалыққа және керісінше «ауысуын» сипаттайды. Эксцентриситет – бұл орбита формасы, әрі Р және а метрлік өлшемдерінің қатынасы болғандықтан, бұл параметрлер периодтық өзгереді, онда е де периодтық өзгереді деген сөз.
Орбитаның иілуі тек периодтық тербелістер ғана жасайды, ал иілудің вектік кетуі мұнда қатыспайды. Мұнда кеңістікте бірқалыпты күй сақтайтын гироскоппен ҒА орбитасының аналогиясы сұралады.
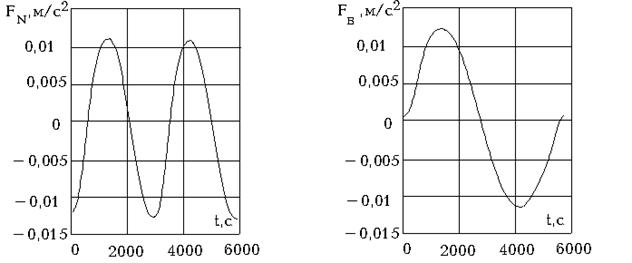
|
4.23 сурет – Нормалды ауытқымалы өзгерісі |
4.24 сурет – Бинормалды ауытқымалы өзгерісі |
Экваторлық аймақта бинормалды
үдеудің кемуімен иілу өседі, ал экватордан ҒА-ты алып
тастасақ, бинормалды үдеу өседі де, иілу кемиді (орбита
вертексі нүктелеріне қозғалысы кезінде, мұндағы
жерсерік асты нүктесінің ені ![]() =i (орбита иілуіне)).
=i (орбита иілуіне)).
Перигейдің өту
уақытының өзгерісін ағындағы шынайы
аномалияның уақыттық өзгеру графигі бойынша
қарастыруға болады. Біздің жағдайда орбита
дөңгелек шамалас және тұрақты
бұрыштың орбиталдық жылдамдыққа ие
болғандықтан, ҒА оргументі u=u(t) уақыттың
сызықтық функциясы болып табылады. ![]() (t)=u(t)-
(t)=u(t)-![]() (t) болғандықтан,
онда
ҒА-ты пилотирлейтін орбиталар үшін шынайы аномалия u
және
перигейдің өту уақыты
(t) болғандықтан,
онда
ҒА-ты пилотирлейтін орбиталар үшін шынайы аномалия u
және
перигейдің өту уақыты ![]() перигей енінің
перигей енінің ![]() өзгеру сипаттамасымен анықталады деген
болжам жасауға болады.
өзгеру сипаттамасымен анықталады деген
болжам жасауға болады.
4.7 ҒА қозғлысына Жер атмосферасының әсері. ҒА-өмір сүру уақыты
ҒА-тың орбиталы қозғалысына ауытқымалы әсер ету атмосфераның кедергісін туғызады, әсіресе төмен орбиталар үшін. Кез келген кедергінің күші ҒА жылдамдығына қарсы бағытталған.
Орбита өлшемдерінің кішірейуі салдарынан ҒА-тың айналу периоды да кішірейеді. 110-120 км-ден төмен атмосфера тығыздығы дереу жоғарылайды және ҒА келесі орамды аяқтай алмай қалады. Оның траекториясы төмен қарай қатты иіледі және ҒА төмен қарай құрайды. (4.33 суретті қара). Шектік орбита болып, айналу периоды 86,5-86,7 мин (Н =110-120 км орбита саналады.
Эллипстік орбита бойымен қозғалатын ҒА , перигейде максимал тежеуге ие болады. Сұлбалы түрде мұны былай елестетуге болады, яғни перигей маңайында оған теріс қатыстық күш (қарсы қозғалыс) әсер етеді, сондықтан апогей қарқынды түрде төмендейтін болады. Сонымен қатар перигей де төмендейтін болады, бірақ айтарлықтай аз сатыда.
Сонымен, әрбір жаңа айналымнан ҒА орбитасы дөңгелекке жақындай түседі. Эллиптикалық орбиталардың эксцентриситеті атмосферамен тежелу процесі кезінде он есе азайюы мүмкін.
Атмосфераның биіктік бойынша ғана емес, мезгіл бойынша, тәулік бойынша өзгеруі, сонымен қатар көп жағдайларда атмосфера жағдайына күн активтілігінің әсер етуі, атмосфераның параметрлерін сенімді болжауға мүмкіндік бермейді. Сондықтан практикалық есептеулер үшін атмосфераның ортастатистикалық модельдерін қолданады. Атмосфера модельдеріндегі қажет етілген дәл есептеулерге байланысты атмосфера сипаттамаларының уақыттық өзгеруі саналуы мүмкін (динамикалық модельдері).
Жер шарын қоршап тұрған
әуе массалары сонымен қатар айналмалы қозғалыста болады
(«Атмосфера жермен бірге айналады деген сөз бар»). Бұл кезде
атмосфераның төменгі қабаттары Жердің айналатын
бұрыштық жылдамдығымен айналады. Атмосфераның
жоғарғы қабаттары айналымға баяулап қатысады.
Атмосфераның айналмалы қозғалысқа қатысу
деңгейі ұстау коэффициентімен беріледі Кз![]() (0,1).
(0,1).
Атмосфераның ҒА орбитасы қозғалысына оның айналуының бұрыштық жылдамдығы Жердің айналуының бұрыштық жылдамдығына тең (Кз= 1) деп санап, әсерін сапалы анализдеу үшін атмосфераның статистикалық моделін аламыз (мұндай атмосфера параметрлері уақыт өте өзгермейді).
150 км-ден астам биіктікте Жер атмосферасы бөлініп тасталған, бірақ ол ҒА қозғалысына ҒА жылдамдығының векторына қатаң қарсы бағытталған кез келген кедергі күшті жасай отыра, қарсылық көрсетеді:
![]()
Яғни Q-шынайы үшұштықтың Т осіне қарсы бағытталған теріс күш, кез келген кедергі күш болып табылады.
п. 4.3.1 –дан тангенсалды ауытқымалы үдеу өзінің әсерін үлкен жартыоське, перигей аргументінің еніне және ҒА орбитасының эксцентриситетіне тигізеді.
|
|
(4.34) |
(4.34)ке FT орына кез келген Q кедергінің күшін қоямыз. Нәтижесінде алатынымыз
|
|
(4.35) |
мұндағы ![]() - баллистикалық коэффициент.
- баллистикалық коэффициент.
(4.35) шешпей отырып, кейбір қорытындылар жасауға болады:
1) бірінші
теңдеудің оң бөлігіне кіретін барлық шамалар
оң. Осыдан туындысы ![]() үлкен жартыось, яғни
орбитаның геометриялық өлшемі үнемі кішірейіп отырады;
үлкен жартыось, яғни
орбитаның геометриялық өлшемі үнемі кішірейіп отырады;
2) атмосфераның әсер ету нәтижесінде ҒА орбитасының перигейі периодтық кетулерге ие болады. Бір орамда перигейдің қорытынды кетуі нөлге тең болады.
3) эксцентриситет периодтық
құраушымен қосы кету құраушысына да ие. Бір
орамда перигейдің қорытынды кетуі нөлге тең емес
болады. Үнемі әсер ететін туынды бөлігі S![]() e<0 болғандықтан, онда
нәтижесінде орбита эксцентриситеті үнемі кеміп отырады және
ҒА орбитасы шеңберлікке ұмтылады. Бұл кезде, бастапқы
орбитаның эксцентриситеті неғұрлым көп болса,
соғұрлым ол шеңберлікке ұмтылады.
e<0 болғандықтан, онда
нәтижесінде орбита эксцентриситеті үнемі кеміп отырады және
ҒА орбитасы шеңберлікке ұмтылады. Бұл кезде, бастапқы
орбитаның эксцентриситеті неғұрлым көп болса,
соғұрлым ол шеңберлікке ұмтылады.
Эксцентриситеттің өте кішкентай мәндері үшін (шеңбер маңайлы орбиталарды), эксцентриситет периодттық тербелістерді өзінің кіші көлемін сақтай отыра жасайды. ҒА қозғалысының траекториясы бұралған спираль тәрізді.
Жасалған қорытындылар орталық тартылу өрісі шартымен және стандарттық орбитаның әсер етуі кезінде «МИР» станциясының қозғалыс теңдеулерін шешу нәтижесінде алынған графиктерді айқындайды. Берілген модельдеу шарттары кеплерлік қозғалысқа тек атмосфералық әсер етуді ғана бөліп алуға мүмкіндік береді.
Станция орбитасы шеңбер тәріздіге жақын және үлкен жартыось бір орам ішінде бірқалыпты кішірейеді.(Т= 5529 сек), (4.25 суретті қара).
|
4.25 сурет – Үлкен жартылай осьтің өзгерісі |
4.26 сурет – Эксцентриситет өзгерісі |
Графикте тек үлкен жартылай осьтің сапалы өзгерісі көрінеді. 400 км биіктікте бір орамда үлкен жартылай осьтің өзгерісі ~20 м құрайды. 4.26 суреттен станция орбитасының эксцентриситеті бір орам ішінде периодты түрде өзгереді, сонымен қатар айтарлықтай мәні жоқ вектік азаюға ие болады.
4.27 суретте бір орамдағы перигейдің периодтық кетуі көрсетілген. Бір орамдағы перигейдің қорытынды кетуі нөлге тең.
|
4.27 сурет – перигей енінің аргументін өлшеу |
4.28 сурет – Еңкею өзгерісі |
4.28 және 4.29 а суреттерден, орбитаның еңкеюі және оның шығыс түйінінің тура шығысы атмосфера әсерінен өзгермейтіні көрсетілген.
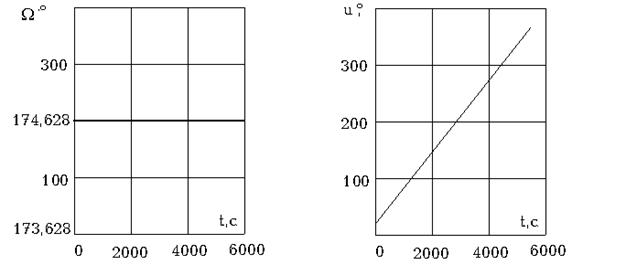
|
а) шығыс түйіннің ұзақтығы |
б) шынайы аномалия |
4.29 сурет – Орбита параметрлерін Атмосфера ықпалымен өлшеу
4.29 б суретте уақыттың сызықтық функциясы ретінде өзгеретін (станция орбитасы сәл шеңбер тәріздес болғандықтан, ал перигей кетуі бір орамда мәні жоқ), шынайы аномалия өзгерісі көрсетілген.
4.30 а, б суретте сәйкес жылдамдықтың өзгеру графиктері мен станцияның бір орамы мезетіндегі тангенсалдық атмосфералық жылдамдығы көрсетілген. Максимум жылдамдықтар және атмосферлық ауытқымалар орбитаның перигейіне келеді.
|
а) ҒА жылдамдығы |
б) атмосфералық жылдамдық |
4.30 сурет – Атмосфера әсерінен ҒА жылдамдығының өзгерісі
Өзгеше қызығушылықты жылдамдық модулінің өзгерісі танытады:
![]() .
.
Фокальді Р параметрінің азаюы әсерінен V жылдамдық өседі. Бұл нәтижені ТК «СОЮЗ» -дың полярлы қысымы бар Жердің гравитациялық өрісінен шығатын номиналды орбитамен жүріп өтуін өлшеу нәтижелері және статикалық атмосфераның әсері дәлелдейді

|
а) үлкен жарты ось |
б) апогей ra және перигей rр радиустары |
4.31 сурет – Атмосфералық әсерден орбита параметрлерінің өзгеруі.
4.32 б суретінде ТК «СОЮЗ»-ң жылдамдығының өзгеруі ТК РН шыққаннан кейінгі орам санының функциясы ретінде көрсетілген. 110-шы орамдағы жылдамдықтың тез өсуі ~80 км биіктігіне және ТК төмендейтін атмосфералық аймаққа сәйкес келеді
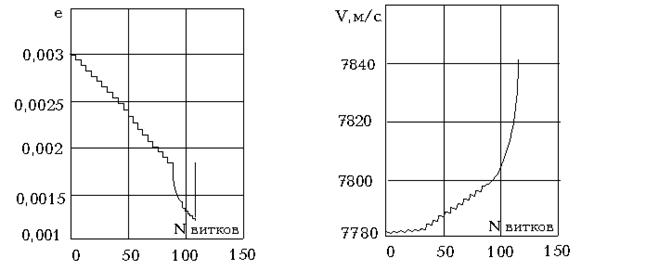
|
а) эксцентриситет |
б) орбиталды жылдамдық |
4.32 сурет – Атмосфералық әсерлер орбита элементтернің өзгеруі
Мұндай парадоксты дененің кинетикалық энергиясының өзгеруі туралы теоремасына негізделіп түсіндіруге болады. Ол теоремаға сәйкес дененің кинетикалық энергиясының өзгеруі істелген жұмыс күшіне тең болады. Бұл жағдайда жұмыс деп біз атмосфераның тежеу күшін және Жердің тартылыс күшін аламыз. Кедергі күш жұмысы дененің кинетикалық энергиясын төмендетеді, ал тартылыс күшінің жұмысы потенциалды энергияның кинетикалық энергияға айналуы әсерінен дененің кинетикалық энергиясын арттырады. Жер атмосферасының едәуір алшақтығынан (разреженность) тежеу күшінің жұмысы тартылыс күшінің жұмысынан едәуір аз болады. Сондықтан, кинетикалық энергия, оған қоса жылдамдық өседі.
ҒА-тың жүру траекториясының сипаттамасына қайтып келетін болсақ, келесі түйінге келетін боламыз. Тежеу мөлшеріне сәйкес ҒА тек қана бір орам жасай алатындай биіктікке дейін түсіп, сонан соң атмосфераның тығыз қабаттарына кіреді. ( 4.33 суретке қара).

4.33 сурет – ҒА-ң атмосфера әсерінен жылжуы
ҒА-тың қызмет ету уақыты ол - өздігінен тежелуі әсерінен ҒА-ң атмосфераға кіру уақытына дейінгі қалған орамдар саны. "СОЮЗ" титпі ҒА үшін – бұл ұшу уақыты. Ол аяқталғаннан кейін келесі екі шарттың біреуі орындалады:
Нmin=150 км при а > 6531 км (Тдр > 87,545 мин) немесе а =6531 км при Нmin >150 км (Тдр= 87,545 мин).
4.31, 4.32 суреттері шығу орбитасындағы ТК «СОЮЗ»-ң жүруінің модельдеу нәтижесін көрсетеді. 4.31а суреті үлкен жарты осьтің өзгеруін орам санының функциясы ретінде көрсетеді. 4.31б суретінде ТК орбитасының апогейі мен перигейінің биіктіктерінің өзгерісі көрсетілген. Эксцентриситеттің азаюы әсерінен апогейдің биіктігі перигейдің биіктігіне қарағанда тезірек түседі. Шығу орбитасында ТК-ң ұшуының 110-шы орамында екі биіктік те Н=120 км болатын критикалық белгіге жетеді де, ТК өздігінен Жерге түседі.
4.32 а суретінде ТК эксцентриситетінің өзгеруі шығарылғаннан кейінгі орамдар санының функциясы ретінде көрсетілген. 110-шы орамдағы эксцентриситеттің өсуі ТК-ң түсуіне сәйкес келеді.
Маневр деп – орбитаның өзгерісіне әкеп соғатын ҒА жүруінің басқарылуын айтамыз.
Маневрді тағайындалуы бойынша келесі түрлерге бөлеміз:
- түзетілетін маневрлер;
- орбитамен ауысу маневрлері;
- кездесу операциясын орындау кезіндегі маневрлер;
- ҒА-ң орбитадан түсу маневрі.
Жоғарыда айтылған маневрлердің барлығы орбита элементтерін өзгертеді, яғни негізінде олар орбитамен ауысу маневрлері болып табылады. Бірақ әр маневрдің өзіндік ерекшеліктері бар.
5.1 Орбита элементтерін түзетудің импульстік маневрі
Түзету маневрінің мақсаты болып, атында айтылып тұрғандай, орбитаны түзету немесе нақтылау табылады. Түзету маневрлері шығару қателіктерін түзету үшін; түрлі факторлардың әсерінен өзгеретін орбита элементтерін түзету үшін; планета аралық траекторияларды түзету үшін және т.б. үшін қолданылады.
Түзету маневрлерін қолданған кездегі орбита элементтерінің өзгерісі қатты байқалмайды. Орбитаның өлшемі мен формасын және жазықтықьағы орбитаның ориентациясын өзгертетін маневрлер - бойлық деп аталады да, ал кеңістіктегі орбита жазықтығын өзгертетін маневрлер - бүйірлік деп аталады.
Егер түзету маневрінің мақсаты – орбитаның бір параметрін өзгерту болса, онда түзету бірпараметрлік деп аталады, ал екі және одан да көп параметрлер өзгертілсе, онда – көппараметрлі деп аталады.
Әдетте түзету маневрінің параметрін есептеген кезде минималды энергетикалық шығынды (жанармайды шығындау критерийлерінен ең оптималдысы) қажет ететін басқаруды табуға тырысады. Мұны импульсті кейіту күш әсерінен орбита элементтерінің өзгеруіне қажет мәндерді қолданып істеуге болады. (5.1 кестені қара). Берілген мәндер кей элементтерді түзету үшін - импульстің қосылу жағдайын, олардың көлемін және бағытын анықтайды.
5.1 кесте
|
Орбита элементтері |
Ауытқымаларды құрудың әсері |
||
|
Тангенциалды |
Нормаланған |
Бүйірлі |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Орбитаның үлкен жартыосі тек тангенциалды импульстің әсерінен өзгереді. Соған орай, оны түзету үшін орбитаға жанасатындай етіп тарту векторын бағыттау керек.
Үлкен жартыосьтің түзетілуінің тиімділігі келесі формуламен анықталады:
JT =(![]() /2
/2![]() a2 V)
a2 V)![]()
![]() a,
a,
мұндағы, JT- түзетілетін
импульстің көлемі, орбита перигейіне қосылатын тангенциалды
импульс кезінде анықталады. (ҒА жылдамдығы максималды).
Бұл жағдайда ![]() а берілген
мәні үшін минималды импульс қажет болады.
а берілген
мәні үшін минималды импульс қажет болады.
Эксцентриситетті түзету тангенциалды да,
қалыпты да импульстің көмегімен анықталады.
Эксцентриситет түзету үшін тангенциалды импульсті апсид
нүктелеріне салу керек. Оны ![]() е қажет
өзгертудің мәніне байланысты салады. Келесі теңдеуден
көреміз:
е қажет
өзгертудің мәніне байланысты салады. Келесі теңдеуден
көреміз:
JT={V/[2·(e+cos(![]() ))]}·
))]}·![]() e
e
Бұл жағдайда импульс көлемі минималды болады.
Мұндай өзгерту кезінде апсид сызығының орналасуы өзгермейді, себебі екінші фокус апсид сызығы бойымен жылжиды.
Перигей аргументін түзету үшін тангенциалды импульстің қосылуының оңтайлы нүктелері – Р және Р' нүктелері. (эллипс пен хорданың екінші фокус арқылы қиылыстырылған (5.1 сурет), себебі бұл жағдайда екінші фокус перпендикуляр бойынша апсидтың бастапқы сызығына қарай жылжиды. Ол оның бұрылысына максималды бұрыш қамтамасыз етеді.

5.1 сурет – Перигей аргументін түзету үшін тангенциалды импульстің қосылуыеың оптималды нүктелері
Перигей аргументі мен эксцентреситетті түзету үшін тангенциалды импульспен қатар қалыпты импульс те қолданыла береді. 5.1-таблицада келтірілген мәндердің анализінен оптималды импульстердің қосылу нүктелерін анықтауға болады. Мұнда эксцентреситет пен перигей аргументін түзету орбитаның үлкен осінің өзгеруіне байланысты болмайды.
Мәндерден келесіні аламыз, орбитаның апогейі немесе перигейіне қосылған қалыпты импульс перигей аргументінің оңтайлы түзелуін қамтамасыз етеді. Шынымен де, мұндай импульс ПҒ2 және АҒ2 радиустары бар шеңбердің доғасымен екінші фокусты жылжытады. (5.2 суретті қара). Импульстер аз болған жағдайда доғаны жанамамен алмастырып, жылжыту перпендикуляр бойынша апсидтің бастапқы сызығына қарай жылжиды деп санауға болады.
Нәтижесінде эксцентреситет мүлдем өзгермейді, ал апсид сызықтарының бұрылу бұрышы максималды болады.
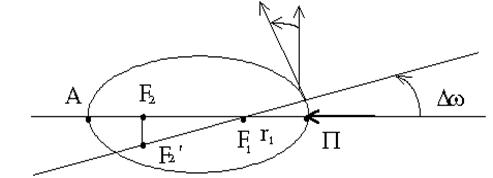
5.2 сурет – Қалыпты импульс әсерінен апсид сызықтарының жылжуы
Келесі факторға мән берген
жөн, 5.1 кестедегі мәліметтерге сәйкес
![]()
![]() берілген кезде кішкентай эксцентреситеті бар
орбиталар үшін қалыпты импульс тангенциалдыға
қарағанда екі есе көп қажет. Эксцентреситет
көбейген сайын бұл айырмашылық азая береді.
берілген кезде кішкентай эксцентреситеті бар
орбиталар үшін қалыпты импульс тангенциалдыға
қарағанда екі есе көп қажет. Эксцентреситет
көбейген сайын бұл айырмашылық азая береді.
Эксцентреситет өзгеруі үшін минималды қалыпты импульс керек болады, егер ол Р және Р' нүктелеріне қосылатын болса. Себебі, тек осы жағдайда ғана екінші фокус апсидтің бастапқы сызығына қарай жылжиды. Нәтижесінде бүкіл жылжыту фокусаралық ара қашықтық өзгерісіне ауысады, ал ол өз кезегінде е эксцентреситетінің едәуір өзгеруіне алып келеді.
Көтеріліп келе жатқан түйіннің бойлығы мен иілуін түзету үшін ҒА-қа басқа элементтің қажетсіз өзгерісін туғызбайтындай етіп, қалыпты емес импульсті қосу қажет. Одан басқа, элементтің түзелуі импульстің минималды қажет көлемінде жүргізілгені маңызды, себебі бұл кезде жанармайдың шығыны азаяды.
5.2 Орбиталды ауысу маневрлері
5.2.1 Компланарлы орбиталды ауысу.
Мұндай маневрлер орбита элементтерінің маңызды өзгеруімен сипатталады.
Егер маневр істеген кезде кеңістіктегі орбитаның орналасу жазығы өзгермесе, онда бұл маневр – компланарлы деп аталады да, ал егер өзгерсе – компланарлы емес деп аталады.
Компланарлы ауысуды қарастырайық. Олар бір импульсті және көп импульсті (екі, үш және одан да көп) болуы мүмкін.
Бір импульсті ауысу келесі жағдайда мүмкін болады: егер орбитаның бастапқы және соңғы нүктесі ортақ болса. Ол осы нүктеде (яғни оның маңайында) басқарушы импульсті қосу нәтижесінде жүзеге асады. Мұндай маневр аппаратты айналма орбитадан биік эллипстік орбитаға (мысалы, айға ұшу үшін) немесе планета аралық траекторияға ауыстырған кезде қажет болады. (5.3 суретті қара)
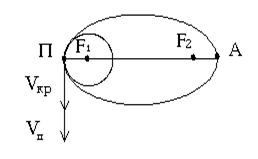
5.3 сурет – Бір мипульсті ауысу
Бұл жағдайда бастапқы айналма орбитаның биіктігі соңғы орбитаның перигейінің биіктігіне тең болады.
Жылдамдықтың өсімін анықтау үшін осы орбиталардың ортақ нүктесіне сәйкес жылдамдықтың мәндерін жазып алайық.
Бастапқы айналма орбитасындағы жылдамдық
![]()
Соңғы эллиптикалық орбитаның перигейіндегі жылдамдық
![]()
Қажетті импульс олардың айырымына тең болады
![]()
Мұндағы ![]() V – бір импульсті маневрдегі сипаттамалы
жылдамдықтың мәніне тең. Сипаттамалық
жылдамдықтың көмегімен маневрдің
энергосыйымдылығын анықтау тиімді, себебі ол бастапқы
және соңғы орбиталардың энергетикасына байланысты
анықталады және нақты ҒА-тың сипаттамаларымен
байланыспайды. Бір жағынан, сипаттамалы жылдамдықтың
қажетті мәнін біле отырып, маневрдің және
ҒА-ң тактілі-техникалық сипаттамаларын анықтауға
болады.
V – бір импульсті маневрдегі сипаттамалы
жылдамдықтың мәніне тең. Сипаттамалық
жылдамдықтың көмегімен маневрдің
энергосыйымдылығын анықтау тиімді, себебі ол бастапқы
және соңғы орбиталардың энергетикасына байланысты
анықталады және нақты ҒА-тың сипаттамаларымен
байланыспайды. Бір жағынан, сипаттамалы жылдамдықтың
қажетті мәнін біле отырып, маневрдің және
ҒА-ң тактілі-техникалық сипаттамаларын анықтауға
болады.
Қиылыспайтын орбиталардың арасындағы ауысулар екі немесе одан да көп импульстердің түйісуі нәтижесінде жүзеге асырылады. Бұл жағдайда ҒА белгілі уақыт ішінде ауысу орбитасы бойымен жылжиды. Мұндай ауысулардың сұлбалары өте көп және әртүрлі, себебі олар маневрдің тағайындалуы мен бастапқы және соңғы орбиталардың параметрлерімен анықталады
Орбиталды ауысулардың кейбір типтерін қарастырайық:
а) ауысу орбитасы бастапқы және соңғы орбиталармен жанасып өтеді.
Маневр келесі жолмен жүзеге асады.
Бастапқы айналма орбитаның кейбір нүктесіне
![]() V1
жанама импульсі қосылады.
V1
жанама импульсі қосылады. ![]() V1 жанама импульсі ҒА-ны
соңғы айналма орбитаның биіктігінде жатқан апогейі бар
эллиптикалық ауыспалы орбитаға жеткізеді.
Сосын
ауыспалы орбитаның апогейіне
V1 жанама импульсі ҒА-ны
соңғы айналма орбитаның биіктігінде жатқан апогейі бар
эллиптикалық ауыспалы орбитаға жеткізеді.
Сосын
ауыспалы орбитаның апогейіне ![]() V2
жанама импульсі қосылады. Ал ол жанама импульс аппаратты
соңғы айналма орбитасына жеткізеді. (5.4 суретті қара)
V2
жанама импульсі қосылады. Ал ол жанама импульс аппаратты
соңғы айналма орбитасына жеткізеді. (5.4 суретті қара)
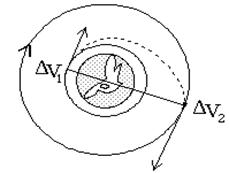
5.4 сурет – Екі импульсті ауысу
Қажетті импульстердің көлемі осы орбитадағы бар (имеющийся) және қажетті (потребный) жылдамдықтардың айырымымен анықталады:
![]() V1 =Vппер
-Vкрисх ;
V1 =Vппер
-Vкрисх ; ![]() V2=Vкркон-Vапер
;
V2=Vкркон-Vапер
;
Ауысудың қосынды импульсі:
![]()
немесе, бұл қатынастарға эксцентреситеттің мәндері мен сәйкес жылдамдықтарын қою арқылы:
е=(rа -rп)/(rа +rп),
келесіні аламыз:
![]()
![]() ;
;
![]() .
.
Бұл ауысу Хоманов ауысу деп аталады.
Ауысу орбитасымен ұшудың бұрыштық қашықтығы (ауысудың бұрыштық қашықтығы) 180°-ты құрайды, мұндай ауысудағы энергетикалық шығындар rn/ra=15.6 қатынасының мәні үшін минималды болып табылады. rn/ra үлкен мәндерінде Хоманов ауысуы оңтайлы болмайды;
б) ауысу орбитасы бастапқы орбитамен жанасады және соңғы орбитаны қиып өтеді (5.5 суретті қара)
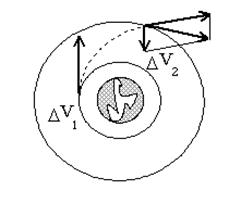
5.5 сурет – Екі импульсті ауысудың тиімді емес жағдайы, мұнда ауысу орбитасы соңғы орбитаны қиып өтеді
Бұл жағдайда ![]() V1 және
V1 және ![]() V2
импульстері жанасатын ауысудағыдан көбірек, ал ауысу уақыты
азырақ болады.
V2
импульстері жанасатын ауысудағыдан көбірек, ал ауысу уақыты
азырақ болады.
в) ауысу орбитасы бастапқы да, соңғы да орбитамен жанаспайды (5.6 суретті қара).

5.6 сурет – Екі импульсті ауысудың тиімді емес түрі, мұнда ауысу орбитасы бастапқы және соңғы орбитамен де қиылыспайды
Мұндай ауысу бұрыңғысынан да тезірек болады, бірақ энергияны өте көп жұмсайды. Мұндай ауысудың шекті жағдайы болып радиалды импульстің ауысуы табылады. Бар ҒА-ң энергетикасы шектеулі болғандықтан, тәжірибеде энергетикалық жағдайдағы оңтайлы ауысуды қолдануға тырысады. Бірақ келесі жағдайды ескерген жөн, ауысу уақыты жанармайдың шығынына қарағанда маңыздырақ сипаттама болатын кезде.
Бастапқы және соңғы орбита ретінде элииптикалық орбиталар да қолданыла береді. 5.7 суретте компланарлы айналма және эллиптикалық орбиталардың арасындағы ауысулар көрсетілген, мұнда соңғы орбитаның апогейіне ауысуы минималды энергетикалық шығынды қажет етеді.
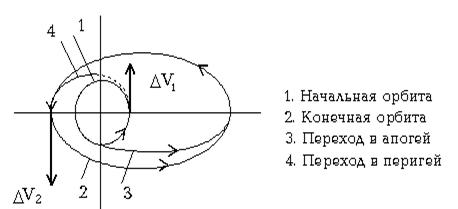
5.7 сурет – Айналма және эллиптикалық орбиталар арасындағы екі импульсті ауысу
5.8 суретте осі бір компланарлы эллиптикалық орбиталардың арасындағы ауысу сұлбасы көрсетілген. Мұндай ауысу апсидалды деп аталады (бастапқы және соңғы орбиталардың апсидалды нүктелерінің арасындағы ауысулар) және импульс апсид сызықтарына перпендикулярлы бағытталған.

5.8 сурет – Эллиптикалық орбиталар арасындағы екі импульсті ауысу
Осі бір эллиптикалық орбиталардың қиылысатын ауысу орбитасы бойымен ауысуы 5.9 суретте көрсетілген.

5.9 сурет – Осьі бір эллипстік орбиталардың қиылысатын ауысу орбитасы бойымен ауысуы
5.10 суретте осі бір емес эллипстік орбиталардың арасындағы ауысу сұлбасы бейнеленген. Эллиптикалық орбиталар арасындағы ауысу орбиталды ауысулардың ішіндегі ең көп қолданылатыны.
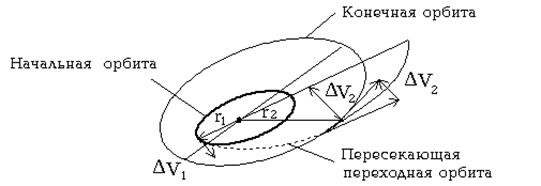
5.10 сурет – осі бір емес эллиптикалық орбиталардың арасындағы ауысу сұлбасы
5.2.2 Компланарлы емес орбиталды ауысулар.
Егер бастапқы және соңғы орбитаның орналасу жазықтықтары бір-бірімен сәйкес келмесе, онда орбита жазықтығын бұру маневрі қажет. Орбита жазықтығын бұрудың ең қарапайым жолы ол – бастапқы және соңғы орбиталар түйінінде қалыпты емес импульс жылдамдығын қосу болып табылады. (5.11 суретті қара)
Қалыпты емес импульс жылдамдық көлемін өзертпейді деп санайтын болсақ, онда жылдамдық импульсінің мәні тек бағытты ғана өзгертетін болады. Одан жылдамдық үшбұрышынан шығатыны:
V=2Vкр ![]() sin(
sin(![]()
![]() /2).
/2).
Мұндағы, Vкр – жергілікті айналма жылдамдығы;
![]()
![]() -
орбита
жазықтығының бұрылу бұрышы.
-
орбита
жазықтығының бұрылу бұрышы.

5.11 сурет – Компланарлы емес орбиталды ауысу
![]() V мәнінен орбита жазықтығын
1°
бұру үшін
V мәнінен орбита жазықтығын
1°
бұру үшін ![]() V=144 м/с
қажет
екенін аламыз, ал
V=144 м/с
қажет
екенін аламыз, ал ![]()
![]() =60°
болған
жағдайда жергілікті айналым жылдамдығына тең болатындай етіп
жылдамдықты өсіру қажет, яғни орбита
жазықтығын бұру маневрі энергияны көп жұмсайды.
Сонда
ҒА жылдамдығы неғұрлым үлкен, яғни
оның орбитасы неғұрлым төмен болса, орбита
жазықтығын берілген бұрышқа бұруға
қажет импульс соғұрлым көп болмақ.
=60°
болған
жағдайда жергілікті айналым жылдамдығына тең болатындай етіп
жылдамдықты өсіру қажет, яғни орбита
жазықтығын бұру маневрі энергияны көп жұмсайды.
Сонда
ҒА жылдамдығы неғұрлым үлкен, яғни
оның орбитасы неғұрлым төмен болса, орбита
жазықтығын берілген бұрышқа бұруға
қажет импульс соғұрлым көп болмақ.
Белгілі бір жағдайларда апогейі
жоғары ауыспалы эллиптикалық орбитаны қолданған тиімді
болуы мүмкін. Бұл жағдайда маневр келесі жолмен жүзеге
асады (5.12 суретті қара). ![]() V1 бірінші импульсі бастапқы және
соңғы орбитаның бір түйініне бастапқы
орбитаға жанасатын жерінен қосылады (П нүктесі). Бұл
импульс ҒА-ты сол жазықтықта жатқан ауысу орбитасына
ауыстырады. Ауысу орбитасының апогейінде (екінші түйінмен
сәйкес келетін)
V1 бірінші импульсі бастапқы және
соңғы орбитаның бір түйініне бастапқы
орбитаға жанасатын жерінен қосылады (П нүктесі). Бұл
импульс ҒА-ты сол жазықтықта жатқан ауысу орбитасына
ауыстырады. Ауысу орбитасының апогейінде (екінші түйінмен
сәйкес келетін) ![]() V2 ортогоналды импульсі қосылады. Ол орбита
жазықтығын бұру үшін қажет. Осы нүктедегі
ҒА жылдамдығы бастапқы орбитаға қарағанда
едәуір аз болғандықтан, орбита жазықтығын
бұратын сипаттамалы жылдамдық шығыны азырақ болады. П
нүктесіне қосылған үшінші
V2 ортогоналды импульсі қосылады. Ол орбита
жазықтығын бұру үшін қажет. Осы нүктедегі
ҒА жылдамдығы бастапқы орбитаға қарағанда
едәуір аз болғандықтан, орбита жазықтығын
бұратын сипаттамалы жылдамдық шығыны азырақ болады. П
нүктесіне қосылған үшінші ![]() V3
жанасатын импульсі ҒА-ты жаңа жазықтықтағы
бастапқы орбитаға қайтарады.
V3
жанасатын импульсі ҒА-ты жаңа жазықтықтағы
бастапқы орбитаға қайтарады.
Мұндай маневр – орбита жазықтығын бұратын үш импульсті маневр деп аталады. Сипаттамалы жылдамдықтың қосынды импульс келесі формуламен анықталады
![]() VS=
VS=![]() V1+
V1+![]() V2+
V2+![]() V3.
V3.
Үш импульсті маневр ![]() VS<
VS<![]() V0
болған жағдайда тиімді, мұндағы
V0
болған жағдайда тиімді, мұндағы
![]() V0
– бір импульсті маневр көмегімен орбита жазықтығын
бұруға кететін сипаттамалы кедергінің шығыны.
V0
– бір импульсті маневр көмегімен орбита жазықтығын
бұруға кететін сипаттамалы кедергінің шығыны.

5.12 сурет – Үш импульсті орбиталды ауысу
Зерттеулерден көретініміз, үш
импульсті маневрді қолдану энергетикалық жағынан тиімді
болатын орбита мен бұру бұрышының параметрлер облысы
![]()
![]() бұру бұрышымен және rn/ra
қатынасымен анықталады. Мұндағы, ra – ауыспалы
орбитаның апогейі.
бұру бұрышымен және rn/ra
қатынасымен анықталады. Мұндағы, ra – ауыспалы
орбитаның апогейі. ![]() VS осы параметрлерге тәуелділігі 5.13 суретте
көрсетілген.
VS осы параметрлерге тәуелділігі 5.13 суретте
көрсетілген.
Көріп тұрғанымыздай, бұру бұрышы үлкен жерлерде энергетикалық шығындар өте үлкен болып қала береді.
Үш импульсті маневр ҒА-ты стационарлы орбитаға шығару үшін қолданылады (r=36000 км, i=0°).
5.13 сурет – Сипаттамалы жылдамдық шығынының орбитаның иілу бұрышының өзгеру көлеміне тәуелділігі
Орбита жазықтығын бұруға кететін энергия шығыны азырақ болу үшін бұру бұрышын бірнеше бөлікке бөліп және үш импульсті маневрді кезегімен орындау керек. Бірақ мұндай маневрді орындау қиын, әрі көп уақытты қажет етеді.
Энергетикалық шығындарды азайтудың тағы бір әдісі, ол – аэродинамикалық (немесе синергиялық) маневрді қолдану.
Бұл маневрдің ерекшелігі: мұнда атмосферада аэродинамикалық қасиеті бар ұшу аппаратының қозғалуы кезінде пайда болатын аэродинамикалық күшті жазықтықты бұру үшін қолдану. Жалпы маневр 4 этаптан тұрады (5.14 суретті қара):
1) ҒА-ң орбитадан тежеуіш импульсті қолдану арқылы түсуі, Кеплер орбитасы бойынша атмосфераның тығыз қабаттарына кіргенге дейін қозғалуы.
2) Атмосферада төмендеумен ұшу, мұнда ұшу жылдамдығы азаяды. Қисайып басқарудың арқасында маневр бүйірлік жазықтықта жүзеге асады.
3) Алғашқы биіктікке дейін шабуыл бұрышымен басқарудың арқасында көтерілу.
4) Сол биіктікте орбиталды жылдамдыққа дейін екпіндету.
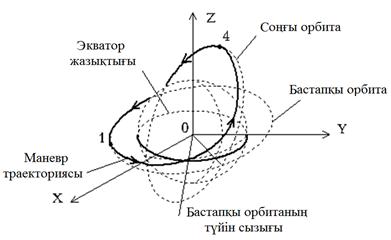
5.14 сурет – Синергиялық орбиталды маневр
Бірінші және төртінші этап ракетаның қозғалтқышының күшімен істеледі. Мұнда жеке этаптар біріге алады.
5.15 суреттегі анализден бір импульсті
маневрден аэродинамикалық маневрдің артықшылықтары K>1.5
және ![]()
![]() >10° болған кезде байқала
бастайды, мұндағы К – аэродинамикалық қасиет
коэффициенті.
>10° болған кезде байқала
бастайды, мұндағы К – аэродинамикалық қасиет
коэффициенті.
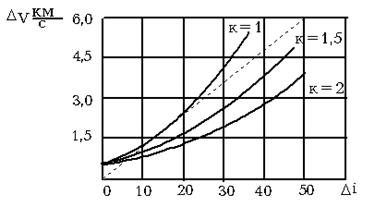
5.15 сурет – Сипаттамалы жылдамдық шығынының орбита жазықтығының қажетті бұру бұрышының көлеміне тәуелділігі
5.15 суреттегі графикте көрсетіліп
тұрғандай, аэродинамикалық маневр Vхар едәуір
шығынын қажет етеді. ![]() VS
қосынды импульсі келесі қатынаспен анықталады:
VS
қосынды импульсі келесі қатынаспен анықталады:
![]() VS =
VS =![]() V1+
V1+![]() Va+
Va+![]() V2.
V2.
Мұндағы, ![]() V1-орбитадан түсуге берілген импульс;
V1-орбитадан түсуге берілген импульс;
![]() V2 – орбита биіктігін қалпына келтіруге
кеткен импульс;
V2 – орбита биіктігін қалпына келтіруге
кеткен импульс; ![]() Va – КА-ң атмосферада қозғалысы
кезінде жылдамдықтың жоғалтуларын қалпына келтіруге
қажет импульс.
Va – КА-ң атмосферада қозғалысы
кезінде жылдамдықтың жоғалтуларын қалпына келтіруге
қажет импульс.
![]() V1 және
V1 және ![]() V2
импульстері
үлкен емес, олар секундына ондаған метрді ғана
құрайды және орбита биіктігіне байланысты болады.
V2
импульстері
үлкен емес, олар секундына ондаған метрді ғана
құрайды және орбита биіктігіне байланысты болады.
![]() Vхар шығындарының негізгі бөлігін
Vхар шығындарының негізгі бөлігін
![]() V2 импульсі құрайды, себебі
ҒА-ң атмосферада қозғалу жылдамдығының
жоғалтулары көп.
V2 импульсі құрайды, себебі
ҒА-ң атмосферада қозғалу жылдамдығының
жоғалтулары көп.
Қозғалу уақыты, яғни
берілген бұру бұрышы көбірек болған сайын,
жоғалтулар да көбейеді. Сонымен орбита жазықтығын K=2 болғанда
40°-қа бұру үшін ![]() VS=3 км/с болу керек (дәл осындай
бұрылыс үшін бір импульсті маневрде 5 км/с қажет болатын еді,
5.15 суретті қара).
VS=3 км/с болу керек (дәл осындай
бұрылыс үшін бір импульсті маневрде 5 км/с қажет болатын еді,
5.15 суретті қара).
Орбиталды ауысулардың жалпы түрі келесідей: бастапқы және соңғы орбиталар бір жазықтықта жатпайды және әртүрлі параметрлерге ие болады. Мұндай ауысулар – кеңістіктік орбиталды маневр деп аталады.
Әдебиеттер тізімі
1. Алексеев К. Б., Бебенин Г. Г., Ярошевский В. А. Маневрирование космических аппаратов. - М.: Машиностроение, 1990. – 416 с.
2. Балахонцев В. Г., Иванов В. А., Шабанов В. И. Сближение в космосе. – М.: Воениздат, 1998. – 240 с.
3. Алёшин А.В., Половников О.В. Основы теории полета космического аппарата. - М.: Наука, 1991. – 212 с.
4. Кубасов В.Н., Данков Г.Ю. , Яблонько Ю.П. Методы сближения на орбите.-М.: Машиностроение, 1985. – 184 с.
5. Лебедев А. А., Соколов В. Б. Встреча на орбите. – М.: Машиностроение, 1989. – 366 с.
6. Левантовский В. И. Механика космического полета в элементарном изложении. - М.: Наука, 1980. – 512 с.
7. Многоразовый орбитальный корабль "Буран" /Ю.П. Семенов, Г.Е.Лозино, В. Л. Лапыгин, В. А. Тимченко и др.; Под ред. Ю. П. Семенова и др. - М.: Машиностроение, 1996. – 448 с.
8. Одинцов В. А., Анучин В. М. Маневрирование в космосе. - М.: Воениздат, 1984. – 152 с.
9. Основы теории полета космических аппаратов/Под. ред. Г.С. Нариманова и М. К. Тихонравова. - М.: Машиностроение, 1992. – 607 с.
10. http://www.satellite.srd.mtuci.ru
11. http://www.space.org.ru
12. http://www.space.com
13. http://www.intersputnik.ru
14. http://www.nasa.com