Коммерциялық емес акционерлік қоғамы
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС ИНСТИТУТЫ
Физика кафедрасы
ІЛГЕРІЛЕМЕЛІ ЖӘНЕ АЙНАЛМАЛЫ
ҚОЗҒАЛЫС МЕХАНИКАСЫ
(Барлық мамандық және барлық оқу түрі студенттері үшін зертханалық жұмыстарды
орындауға арналған әдістемелік нұсқаулар)
Алматы 2008
ҚҰРАСТЫРУШЫЛАР: Т.С. Байпақбаев, М.Ш Қарсыбаев, А.М. Саламатина. Ілгерілемелі және айналмалы қозғалыс механикасы. Барлық мамандық және барлық оқу түрі студенттері үшін зертханалық жұмыстарды орындауға арналған әдістемелік нұсқаулар. - Алматы: АЭЖБИ, 2008.- 39 б.
Әдістемелік нұсқаулар тәжірибенің әдістемелері мазмұндалған, эксперименттік құрылғылардың сипаттамасы келтірілген, тәжірибенің орындалуы мен алынған мәліметтерді өңдеу реттері және бақылауға арналған сұрақтар берілген тоғыз зертханалық жұмыстарды қарастырады.
Әдістемелік нұсқаулар барлық мамандық және барлық оқу түрінің студенттеріне арналған.
Кіріспе
Физика экспериментпен тікелей байланысты. Бұл – барлық физикалық заңдар, тәжірибе нәтижелерін жинақтап және оларды салыстыру арқылы тексеріліп барып ашылады деген сөз.
Физикалық практикум студенттерге негізгі физикалық заңдылықтарды терең түсініп, тәжірибе жүргізудің қарапайым икемділігін игеруге, тәжірибенің нәтижелерін талдауды және олардың дәлдігіне баға беруді үйренуге көмектеседі. Бұл практикум болашақ инженердің алдағы өз бетінше істейтін жұмысына кіріспе деуге болады.
Лабораториялық жұмысқа дайындықты осы жұмыстың теориясымен танысудан бастау керек, ол үшін берілген физика оқулықтарын және физпрактикумды пайдаланып, әдістемелік нұсқауды зейін қоя оқып, жұмыста қолданылатын құралдармен танысу керек.
Эксперименттің дұрыс болуы тәжірибе нәтижелерін қатесіз жазуға байланысты. Осы мақсатта лабораториялық жұмыс жүргізу үшін арнайы дәптер арнап, онда жұмыстың тақырыбы, мақсаты және міндеті, қысқаша қорытынды (конспект) жазылуы керек. Жаңа бастап жатқан тәжірибе жүргізушілерге арналған пайдалы кеңестерді сіз [2] әдебиетінде таба аласыз.
Физикалық зертханада орындалатын жұмыс әдетте үш кезеңге бөлінеді, олар: тәжірибе жасауға дайындық, тәжірибені орындау және жұмыстың қорытынды есебін жасау. Дайындалу кезеңінде мына мәселелерге көңіл бөлу керек, яғни:
а) мақсаттар және тапсырмалармен танысу;
ә) берілген тәжірибенің негізі болып табылатын құбылыстар мен процестердің, тәуелділіктер мен заңдылықтардың ара қатынасын, мағынасын көрсететін теориялық ілімдерді анықтау;
б) жұмысты орындау жоспарын жасау;
в) тәжірибе мәліметтерін жазуға қажет кестелерді дайындау.
Дайындалу жұмысы барысында студентте орындалатын тәжірибе туралы айқын көзқарасы және қандай нәтиже болуы мүмкін екені туралы ой қалыптасуы тиіс.
Тәжірибелерді орындауда құралдарды орын-орнына қойып, өлшенетін шамаларды бақылап, артынша оларды өлшеуден бастайды; алынған мәліметтерді мұқият түрде кестелерге толтырады. Ал зертханалық жұмыстың соңғы кезеңінде алынған мәліметтерді өңдеу, ізделініп отырған шамаларды есептеп табу және қателіктерді бағалау қажет. Есептеулер жүргізуден бұрын жуықтау шамаларға амалдар қолдану ережелерімен танысқан жөн. Ақырында орындалған жұмыстың нәтижелері бойынша қажетті қорытындыларды тұжырымдау қажет.
Тәжірибелік физикада әртүрлі мақсаттар үшін өте жиі сызбалар (графиктер) пайдаланылады. Оның себебі – біріншіден, көрнекі болуы үшін және басқа мәліметтермен немесе теория жүзінде алынған қисықпен салыстыруға; екіншіден, қандай да болмасын бір шаманы (мыс., сызбаның көлбеулігі немесе сызбаның координат осімен қиылу кесіндісі арқылы және т.б.) анықтау үшін; үшіншіден, құралды бөліктеу үшін. Сызбаны салу [1,2] әдебиеттерде жан-жақты мазмұндалған бірқатар талаптарға сай болуы керек.
1 Өлшеулердің нәтижелерін статистикалық өңдеу
1.1 Негізгі ұғымдар мен анықтамалар
Физикалық эксперимент жүргізу,
әдетте, қандай да болмасын бір физикалық шаманы өлшеуге
байланысты. Өлшеулер, зерттеліп отырған физикалық шама
өлшенсе, тікелей өлшеу деп, ал ізделініп отырған
шаманың мәні тікелей өлшеулер нәтижесінде алынған
шамалардың белгілі бір байланысы арқылы алынса, онда ол жанама
өлшеу деп бөлінеді. Кез келген өлшеуге қателік жіберу
тән, сондықтан тәжірибелерде біз өлшеніп отырған
шаманың шын ![]() мәнінің
орнына қандай да болмасын бір
мәнінің
орнына қандай да болмасын бір ![]() жуық мәнін аламыз.
Физикалық шаманың шын мәні мен өлшеу
нәтижесінің айырмасы өлшеудің абсолют қателігі
деп аталады
жуық мәнін аламыз.
Физикалық шаманың шын мәні мен өлшеу
нәтижесінің айырмасы өлшеудің абсолют қателігі
деп аталады ![]() .
.
Өлшеулердің қателіктерін олардың сипатына қарай үш түрге бөлуге болады.
Жүйелік қателіктер бір ғана себептен пайда болады. Сондықтан, әдетте олардың мәні мен таңбасы тәжірибе нәтижесінде бірдей болып, қайталана береді, яғни жүйелік түрде қайталанады. Олар құралдардың дұрыс көрсетпеуінен және өлшеу тәсілінің жеткіліксіздігінен болады. Жүйелік қателікті құралды тексеру арқылы және өлшеу тәсілін жетілдіру арқылы азайтуға болады.
Кездейсоқ қателіктер, өлшеу кезінде оларды ескеру мүмкін емес, бақылауға болмайтын бөгеттердің салдарынан болады. Олар құралдың дәлдігінің шектілігіне, біздің сезу мүшелеріміздің сезгіштігінің шектілігіне, сыртқы жағдайларының өзгеруіне және т.б. байланысты. Кездейсоқ қателіктерді жоюға болмайды, алайда, олар орасан көп өлшеу жүргізу нәтижесінде ықтималдылық заңдылықтарына сай болуы себепті шаманың шын мәнін қамтитын аймақты көрсетуге болады.
Кездейсоқ қателіктер тәжірибені өте көп қайталаған кезде және өлшеулердің шашырау себебінен болады. Біз шын мәні а болатын физикалық шаманы n рет өлшедік делік.
Кездейсоқ қателіктердің
салдарынан біз ![]() орнына
орнына
![]() ...
...![]() …
…![]() …
…![]() алдық делік. Осы
мәндердің қайсысы шын мәніне жақын екенін біз,
әрине, білмейміз. Берілген өлшеулердің ішінен ең
дұрыстауы олардың
алдық делік. Осы
мәндердің қайсысы шын мәніне жақын екенін біз,
әрине, білмейміз. Берілген өлшеулердің ішінен ең
дұрыстауы олардың ![]() орташа арифметикалық мәні
болады
орташа арифметикалық мәні
болады
 (1)
(1)
Әлбетте, орташа мән шын
мәннің тек жуықтаған бағасы болатындықтан,
орташа нәтиженің шын мәннен ауытқуының
мүмкін болатын абсолют шамасын бағалай білген жөн. Бұл ![]() ауытқу
орташаның абсолют қатесі деп аталады, яғни
ауытқу
орташаның абсолют қатесі деп аталады, яғни
![]() (2)
(2)
Орташа ![]() мәні мен орташаның
мәні мен орташаның ![]() абсолют қатесі,
сенімділік интервалы деп аталатын
абсолют қатесі,
сенімділік интервалы деп аталатын ![]() тәжірибенің мәліметтері
бойынша өлшенетін шама ішінде жататын аумақты табуға
мүмкіндік береді.
тәжірибенің мәліметтері
бойынша өлшенетін шама ішінде жататын аумақты табуға
мүмкіндік береді.
Мысалы, дыбыс жылдамдығын өлшеу нәтижесі былай жазылған
![]() .
.
Бұл жазылу дыбыс жылдамдығы,
тәжірибенің мәліметтері бойынша, 330 м/с пен 340 м/с
аралығында жатыр дегенді білдіреді. Алайда бұл ұйғарым
да ақиқат болмауы мүмкін. Алынған нәтиженің
нанымдылығын көрсету қажет. Ол сенімділік
ықтималдылығы ![]() деген шамамен бағаланады.
деген шамамен бағаланады.
Сенімділік ықтималдылығы – өлшеніп отырған шаманың шын мәні кіретін, есептеліп табылған сенімділік интервалы.
Жоғарыда келтірілген мысалда интервал ![]() болатын сенімділік
ықтималдылығымен табылған болсын делік. Бұл 100
өлшеудің мәнінің 95-і табылған интервал ішіне
кіреді де, тек 5 мәні кірмей қалады деген сөз. Сенімділік
интервалы неғұрлым жіңішке (
болатын сенімділік
ықтималдылығымен табылған болсын делік. Бұл 100
өлшеудің мәнінің 95-і табылған интервал ішіне
кіреді де, тек 5 мәні кірмей қалады деген сөз. Сенімділік
интервалы неғұрлым жіңішке (![]() абсолют қате аз) болған сайын
берілген сенімділік ықтималдылығына сәйкес, өлшеу
неғұрлым дәл жүргізілген болып есептеледі. Өлшеудің
дәлдігі абсолют қате мен барлық өлшеулердің
орташа мәнін салыстырмалы қатені есептеген кезде, салыстырып
көргенде байқалады.
абсолют қате аз) болған сайын
берілген сенімділік ықтималдылығына сәйкес, өлшеу
неғұрлым дәл жүргізілген болып есептеледі. Өлшеудің
дәлдігі абсолют қате мен барлық өлшеулердің
орташа мәнін салыстырмалы қатені есептеген кезде, салыстырып
көргенде байқалады.
Салыстырмалы қатені есептеу формуласы
![]() .
.
Дыбыс жылдамдығы қарастырған мысалда ол мынаған тең
![]()
Сонымен, кез келген физикалық шаманы өлшеу берілген сенімділік ықтималдылығына сәйкес сенімділік интервалын көрсетіп, өлшеулердің салыстырмалы қатесін есептеумен аяқталуы тиіс.
1.2 Сенімділік интервалын кездейсоқ шаманың қалыпты бөліну заңын негізге ала отырып анықтау
Сенімділік интервалы мен сенімділік
ықтималдылығы негізінде кездейсоқ шаманың
бөлінуінің қалыпты заңы болып табылатын,
өлшеулердің қателіктері теориясымен анықталады.
Бұл теория тек кездейсоқ қателерді ғана қарастырады.
Қалыпты бөлінудің жалпы түрі көрсетілген
1.1-суреттен өлшеулер нәтижелерінің көп мөлшері ![]() центр маңайында
топталатыны көрінеді. Бөліну центрінің екі
жағындағы ауытқулар, олардың
центр маңайында
топталатыны көрінеді. Бөліну центрінің екі
жағындағы ауытқулар, олардың ![]() абсолют шамалары
неғұрлым көп болса, соғұрлым сирек
байқалады.
абсолют шамалары
неғұрлым көп болса, соғұрлым сирек
байқалады.
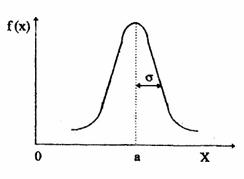
1.1 Сурет
Жеке өлшеулердің ![]() шамасына қатысты
шашырауларының дәрежесін, бөліну функциясының
басқа параметрі
шамасына қатысты
шашырауларының дәрежесін, бөліну функциясының
басқа параметрі ![]() анықтайды. Бөліну функциясын
талдап, бөліну центрінен σ қашықтықта
қисықтың иілу нүктесі бар екенін және
анықтайды. Бөліну функциясын
талдап, бөліну центрінен σ қашықтықта
қисықтың иілу нүктесі бар екенін және ![]() болғанда функция
тез нөлге ұмтылатынын көрсетеді. Дисперсия деп аталатын
болғанда функция
тез нөлге ұмтылатынын көрсетеді. Дисперсия деп аталатын ![]() шамасы жеке
өлшеулер нәтижелерінің нақты мәннен
ауытқуларының квадраттарының орташа мәнімен
сәйкес келеді, яғни
шамасы жеке
өлшеулер нәтижелерінің нақты мәннен
ауытқуларының квадраттарының орташа мәнімен
сәйкес келеді, яғни ![]() . Сондықтан,
. Сондықтан, ![]() параметрі ауытқу
стандарты немесе орташа квадраттық ауытқу деп аталады;
сондай-ақ
параметрі ауытқу
стандарты немесе орташа квадраттық ауытқу деп аталады;
сондай-ақ ![]() параметрі
параметрі
![]() болғанда
болғанда
![]() болатын,
бөліну функциясының максимал мәнін анықтауға
мүмкіндік береді. Бұдан σ неғұрлым аз болса,
максимум соғұрлым жоғары болатыны көрінеді. Бір
графикке салынған σ шамасының әртүрлі
мәндеріне сәйкес бөліну қисығы астындағы
аудан бірдей болуы тиіс (1-ге тең), сондықтан графикте
болатын,
бөліну функциясының максимал мәнін анықтауға
мүмкіндік береді. Бұдан σ неғұрлым аз болса,
максимум соғұрлым жоғары болатыны көрінеді. Бір
графикке салынған σ шамасының әртүрлі
мәндеріне сәйкес бөліну қисығы астындағы
аудан бірдей болуы тиіс (1-ге тең), сондықтан графикте ![]() - ның кішкене
мәнінің қисығы
- ның кішкене
мәнінің қисығы ![]() - ның үлкен мәнімен
салыстырғанда жіңішке және биік болып келеді.
- ның үлкен мәнімен
салыстырғанда жіңішке және биік болып келеді.
1.2-суретте екі ![]() қалыпты
қисық көрсетілген. Өлшеулерде өлшенетін
шаманың мәні таңдап алған өлшеу тәсіліне
байланысты, тәсіл дәл болған сайын,
қалыпты
қисық көрсетілген. Өлшеулерде өлшенетін
шаманың мәні таңдап алған өлшеу тәсіліне
байланысты, тәсіл дәл болған сайын, ![]() кішкене болады. Сенімділік
интервалы
кішкене болады. Сенімділік
интервалы ![]() шамасына
қарағанда симметриялы етіп таңдап алынады да, сенімділік
ықтималдылығы (4 өрнегін қараңыз)
шамасына
қарағанда симметриялы етіп таңдап алынады да, сенімділік
ықтималдылығы (4 өрнегін қараңыз) ![]() пен
пен ![]() шегі аралығында
(1.5) бөлінудің қалыпты заңынан интеграл алу
арқылы анықталады.
шегі аралығында
(1.5) бөлінудің қалыпты заңынан интеграл алу
арқылы анықталады.
Егер ![]() интервалының жарты енін σ
мәніне еселі етіп алса, онда сәйкес есептеулер
интервалының жарты енін σ
мәніне еселі етіп алса, онда сәйкес есептеулер ![]() үшін сенімділік
ықтималдылығы
үшін сенімділік
ықтималдылығы ![]() ,
, ![]() үшін
үшін ![]() , ал
, ал ![]() үшін
үшін ![]() болатындығын көрсетеді.
Өлшеулер жүргізгенде
болатындығын көрсетеді.
Өлшеулер жүргізгенде ![]() және
және ![]() шамалары белгісіз. Сондықтан,
өлшеулер нәтижелерін математикалық өңдегенде осы
нәтижелер арқылы
шамалары белгісіз. Сондықтан,
өлшеулер нәтижелерін математикалық өңдегенде осы
нәтижелер арқылы ![]() және
және ![]() мәндерінің ең
жақсы мәліметін алу қажет.
мәндерінің ең
жақсы мәліметін алу қажет.
Барлық өлшенген
мәндердің ішінен, ![]() шамасының ең
дұрыс бағасы, нәтижелердің орташа арифметикалық
мәні болып табылады (1). Өлшеу саны көп болғанда
шамасының ең
дұрыс бағасы, нәтижелердің орташа арифметикалық
мәні болып табылады (1). Өлшеу саны көп болғанда ![]() , яғни
, яғни ![]() .
. ![]() шамасының
ең дұрыс бағасы – орташа квадраттық ауытқу
шамасының
ең дұрыс бағасы – орташа квадраттық ауытқу ![]() мына өрнекпен
анықталады
мына өрнекпен
анықталады 
![]() болғанда
болғанда ![]() мен σ
дәл келеді, яғни
мен σ
дәл келеді, яғни ![]() .
.
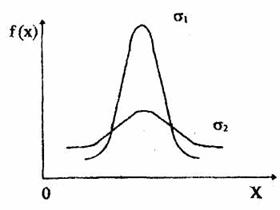
1.2 Сурет
Өлшеулер саны көп ![]() болғанда,
нәтижені "үш сигма" ережесін пайдаланып
өңдейді. (1) формула бойынша
болғанда,
нәтижені "үш сигма" ережесін пайдаланып
өңдейді. (1) формула бойынша ![]() , (3) формула арқылы
, (3) формула арқылы ![]() орташа
квадраттық ауытқуды тауып, оны 3
орташа
квадраттық ауытқуды тауып, оны 3 ![]() -ға тең деп алып, сенімділік
интервалын мына түрде жазады
-ға тең деп алып, сенімділік
интервалын мына түрде жазады
![]() ,
,
бұл жағдайға сәйкес сенімділік ықтималдылығы 0,997.
Аз өлшеулер жүргізілетін
зертханалық практикумда ![]() Стьюдент ашқан тәсіл
кең қолданылады. Бұл аз өлшемдер тәсілі деп
аталады. Бұл жағдайда орташа шаманың оның шын
мәнінен ауытқу стандарты ретінде орташаның орташа
квадраттық ауытқуы деп аталатын S шамасы алынады, ол
Стьюдент ашқан тәсіл
кең қолданылады. Бұл аз өлшемдер тәсілі деп
аталады. Бұл жағдайда орташа шаманың оның шын
мәнінен ауытқу стандарты ретінде орташаның орташа
квадраттық ауытқуы деп аталатын S шамасы алынады, ол
 (4)
(4)
![]() шамасын жиі σ арқылы белгілеп
және орташа квадраттық ауытқу (орта-шаның орташа
квадраттық қателігі) деп атайтынын айта кеткен жөн.
Сенімділік интервал мына түрде жазылады
шамасын жиі σ арқылы белгілеп
және орташа квадраттық ауытқу (орта-шаның орташа
квадраттық қателігі) деп атайтынын айта кеткен жөн.
Сенімділік интервал мына түрде жазылады
![]() ,
,
мұндағы
![]() (5)
(5)
![]() – Стьюдент коэффициенті.
– Стьюдент коэффициенті.
Стьюдент коэффициенті сенімділік
ықтималдылығының берілген мәніне ![]() және жүргізілген n
өлшеу санына байланысты. Бұл коэффициенттер ықтималдылық
теориясында есептелініп белгіленеді де, мынадай анықтамалық
кестесінде келтіріледі.
және жүргізілген n
өлшеу санына байланысты. Бұл коэффициенттер ықтималдылық
теориясында есептелініп белгіленеді де, мынадай анықтамалық
кестесінде келтіріледі.
1.1 К е с т е - Стьюдент коэффициенттері кестесі
|
n |
0,6 |
0,7 |
0,95 |
0,99 |
|
2 |
1,38 |
2,0 |
12,71 |
63,66 |
|
3 |
1,06 |
1,3 |
4,30 |
9,92 |
|
4 |
0,98 |
1,3 |
3,18 |
5,84 |
|
6 |
0,92 |
1,2 |
2,57 |
4,03 |
|
7 |
0,90 |
1,1 |
2,45 |
3,71 |
|
8 |
0,90 |
1,1 |
2,36 |
3,50 |
|
9 |
0,90 |
1,1 |
2,31 |
3,36 |
|
10 |
0,88 |
1,1 |
2,26 |
3,25 |
Өлшеулер саны көп болғанда, Стьюдент тәсілі қалыпты заңды пайдаланғандағыдай нәтиже береді. Алайда, өлшеулердің аз саны үшін Стьюдент тәсілімен есептелген сенімділік интервалы тиімді болып саналады.
1.3 Аз өлшеулер тәсілімен алынған нәтижелерді өңдеу тәртібі
Аз өлшеулер тәсілімен алынған нәтижелерді мына тәртіппен өңдеу керек:
а) n өлшеу (![]() ,
, ![]() ...,
...,![]() …
…![]() ) жүргізу;
) жүргізу;
ә) мына формула бойынша орташа арифметикалық мәнді табу
б) әр өлшеу
нәтижесінің орташадан ауытқуын анықтау ![]() (тік жақшалар
берілген айырмалардың тек абсолют шамалары ғана қажет
екенін көрсетеді);
(тік жақшалар
берілген айырмалардың тек абсолют шамалары ғана қажет
екенін көрсетеді);
в) орташа квадраттық ауытқуды анықтау
;
г) Стьюдент коэффициенттері кестесінен сәйкес t мәнін табу;
д) арифметикалық орташаның
абсолют қатесін анықтау ![]() ;
;
е) салыстырмалы қатені анықтау
![]() ;
;
ж) қорытынды нәтижені мына
түрде жазу ![]() үшін,
үшін,
![]() ,
, ![]() .
.
Қорытынды нәтижені жазғанда
мынау есте болуы керек. ![]() абсолют қатенің өзі
анықталғанда белгісіз бір қатемен келетіндіктен, оны бір
таңбалы цифрға дейін дөңгелектеу керек. Егер
қатенің бірінші цифры 4-тен кем болса, онда нәтижеде екі
таңбалы сан қалуы керек. Мысалы, есептеулер нәтижесінде
абсолют қатенің өзі
анықталғанда белгісіз бір қатемен келетіндіктен, оны бір
таңбалы цифрға дейін дөңгелектеу керек. Егер
қатенің бірінші цифры 4-тен кем болса, онда нәтижеде екі
таңбалы сан қалуы керек. Мысалы, есептеулер нәтижесінде ![]() алынды.
алынды. ![]() қалдыру керек.
қалдыру керек. ![]() қатені
қатені ![]() немесе
немесе ![]() дейін
дөңгелектеу керек.
дейін
дөңгелектеу керек.
Абсолют қате алынған
нәтиженің қай разрядында дәлсіздік орын алғанын
көрсетеді, сондықтан нәтижені қатенің дәлдігіне
дейін дөңгелектеу қажет. Мысалы, біз ![]() және
және ![]() алдық делік. Демек, жауап
былай жазылуы тиіс
алдық делік. Демек, жауап
былай жазылуы тиіс
![]() ;
;
немесе ![]() және
және ![]() алып, былай жазамыз:
алып, былай жазамыз:
![]() .
.
1.4 Құралдардың дәлдік кластары
Өлшегіш құралдарды сипаттау үшін көбінесе дәлдік класы деген ұғымды қолданылады.
Құралдың
![]() дәлдік
класы деген
дәлдік
класы деген ![]() рұқсат
етілген ең үлкен келтірілген салыстырмалы қателік, ол мына
формуламен анықталады
рұқсат
етілген ең үлкен келтірілген салыстырмалы қателік, ол мына
формуламен анықталады
![]() (6)
(6)
мұндағы
![]() - құралдың
рұқсат етілген ең үлкен салыстырмалы қателігі;
- құралдың
рұқсат етілген ең үлкен салыстырмалы қателігі;
![]() - құрал
шкаласы бойынша өлшенетін шаманың ең үлкен (номинал)
мәні.
- құрал
шкаласы бойынша өлшенетін шаманың ең үлкен (номинал)
мәні.
Құралдардың дәлдік класы бекітілген үлгіге сәйкес мынадай мәндер : 0,02; 0,05; 0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 4,0 қабылдайды.
Құралдың дәлдік класы оның шкаласында көрсетіледі. Егер мұндай белгі шкала бетінде жазылмаған болса, онда бұл құрал топқа кірмейді де, оның дәлдік класы 4% -дан артық болғаны.
Дәлдік
класын біле отырып құралдың ең үлкен абсолют
қателігін ![]() (оны
құралдың шкаласы үшін тұрақты деп алады)
мына формуламен анықтауға болады
(оны
құралдың шкаласы үшін тұрақты деп алады)
мына формуламен анықтауға болады
![]() (7)
(7)
2 ММФ-1 зертханалық жұмысы. Өлшеу практикумы
Жұмыстың мақсаты: өткізгіш сымның меншікті кедергісі арқылы физикалық шамаларды өлшеу әдістемесі мен өлшеулер нәтижелерін өңдеу тәсілдерін меңгеру.
Тапсырмалар:
- сымның кедергісін анықтау
және сымның R кедергісінің оның ![]() ұзындығына
тәуелділігін байқау;
ұзындығына
тәуелділігін байқау;
- сым затының ρ меншікті кедергісін анықтау;
- өлшеулердің нәтижелерін аз санды өлшеу тәсілі бойынша өңдеу.
2.1 Тәжірибе әдістемесі
Өткізгіштің кедергісі
олардың пішініне, өлшемдеріне және ол жасалған
затқа (материалға) байланысты, яғни ![]() . Егер өткізгіштің
көлденең қимасы дөңгелек пішінді болса
. Егер өткізгіштің
көлденең қимасы дөңгелек пішінді болса ![]() , онда оның
кедергісі
, онда оның
кедергісі ![]() .
.
мұндағы ![]() - өткізгіш
ұзындығы;
- өткізгіш
ұзындығы;
![]() – оның диаметрі;
– оның диаметрі;
![]() – меншікті кедергі.
– меншікті кедергі.
![]()
(1)-ден формуланы оңай алуға болады, ол осы жұмыстағы есептеу формуласы.
Кедергінің ![]() мәні амперметр мен
вольтметрдің көрсетуі бойынша есептелінеді (есептеу формулалары
төменде берілген).
мәні амперметр мен
вольтметрдің көрсетуі бойынша есептелінеді (есептеу формулалары
төменде берілген).
Кедергіні дәл өлшеу үшін
электр өлшегіш құралдардың ішкі кедергісін (амперметрдің
![]() және
вольтметрдің
және
вольтметрдің ![]() )
ескеру қажет.
)
ескеру қажет.
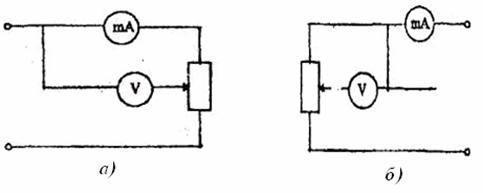
2.1 Сурет
2.1-суретте айырып-қосқыштың көмегімен еркін таңдап алуға болатын, құралдардың қосылуының мүмкін екі схемасы а) және б) көрсетілген.
Схема а) қосылғанда кедергіні мына формуламен есептеу керек
![]() (3)
(3)
мұндағы ![]() – амперметрдің ішкі
кедергісі;
– амперметрдің ішкі
кедергісі;
![]() және
және ![]() – сәйкес вольтметр мен
амперметрдің көрсетулері.
– сәйкес вольтметр мен
амперметрдің көрсетулері.
Егер схема б) қосылған болса, онда кедергі мына формуламен анықталады
 (4)
(4)
мұндағы ![]() – вольтметрдің ішкі
кедергісі. Бұл екі формуланы да сәйкес тізбектер үшін Ом
заңынан алуға болады.
– вольтметрдің ішкі
кедергісі. Бұл екі формуланы да сәйкес тізбектер үшін Ом
заңынан алуға болады.
2.2 Тәжірибе қондырғысы
РРМ-01 құрылғысы (2.2-сурет) сымның меншікті кедергісін анықтауға арналған.
Қозғалмайтын екі К1 және К2 контакттардың арасына зерттелетін сым орналасқан. К3 қозғалмалы контакттың көмегімен кернеуінің түсуі мен тогы өлшенетін сымның қажетті ұзындығы қойылады. а) және б) қосылулары сұлбасы П айырып-қосқышпен реттеледі.
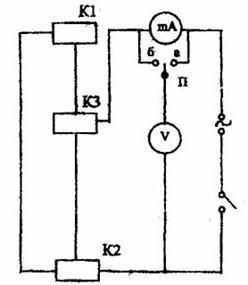
2.2 Сурет
2.3 Жұмыстың орындалу реті
2.3.1 Орта және төменгі контакт арасындағы сымның ұзындығын (барлық ұзындығының жартысынан кем емес) өлшеп, 2.1-кестесіне жазу.
2.3.2 Микрометрдің көмегімен
сымның ![]() диаметрін
өлшеу.
диаметрін
өлшеу.
2.3.3 Қондырғыны ток көзіне қосып, П айырып-қосқышпен құралдарды қосу сұлбасын таңдап алу.
2.3.4 Берілген ![]() ұзындықтың
әртүрлі мәндері (5-тен кем емес) үшін сымның
ұштарындағы кернеу мен ондағы ток күшін он рет
өлшеу.
ұзындықтың
әртүрлі мәндері (5-тен кем емес) үшін сымның
ұштарындағы кернеу мен ондағы ток күшін он рет
өлшеу.
2.1 К е с т е
|
|
|
|
|
|
|
|
|
2.4 Алынған мәліметтерді өңдеу
2.4.1 Таңдап алынған қосылу сұлбасына сәйкес (3) немесе (4) формуламен сымның актив кедергісін анықтау.
2.4.2 Сымның ![]() кедергісінің оның
кедергісінің оның ![]() ұзындығына
тәуелділік графигін салу.
ұзындығына
тәуелділік графигін салу.
2.4.3 Меншікті кедергінің ![]() мәнін (2)
формула бойынша есептеу.
мәнін (2)
формула бойынша есептеу.
2.4.4 Барлық есептеулер үшін [(2),
Кіріспе] формула бойынша ![]() орташа квадраттық қателікті
және
орташа квадраттық қателікті
және ![]() сенімділік
инервалын (
сенімділік
инервалын (![]() ықтималдылық
үшін) табу.
ықтималдылық
үшін) табу.
2.4.5 Өлшеулердің ішінен кез
келген үш мәнін таңдап алып, аз өлшеулер әдісі
бойынша ![]() аралығын
табу керек.
аралығын
табу керек.
2.4.6 Арифметикалық орташаға
сәйкес салыстырмалы қателікті n=10 және ![]() үшін табу.
үшін табу.
2.4.7 Кез келген бірлік өлшемінің салыстырмалы құралдық қателігін мына формула бойынша табу
![]()
2.4.8 Абсолют және салыстырмалы қателіктерді салыстырып, алынған нәтижелерді талдап, қорытынды жасау.
2.5 Бақылау сұрақтары
2.5.1 Тура және жанама өлшеулер, жүйелік және кездейсоқ қателіктер.
2.5.2 Абсолют және салыстырмалы қателіктер. Құралдың дәлдік класы.
2.5.3 Сенімділік интервалы және сенімділік ықтималдылығы.
2.5.4 Тура және жанама өлшеулердің нәтижелерін өлшеу.
2.5.5 Жұмыстың орындалу әдістемесі туралы.
3 ММФ-2 зертханалық жұмысы. Кинематика және динамика заңдарын Атвуд машинасы арқылы оқып үйрену
Жұмыстың мақсаты: бірқалыпты және бірқалыпты үдемелі қозғалыс заңдарын және Ньютонның екінші заңын оқып үйрену
Тапсырмалар:
- бірқалыпты және бірқалыпты үдемелі қозғалыс формулаларын тексеру;
- Ньютонның екінші заңын тексеру.
3.1 Тәжірибе әдістемесі
Созылмайтын жіпке байланған массалары ![]() және
және ![]() екі жүкшеден
және инерция моменті бар радиусы
екі жүкшеден
және инерция моменті бар радиусы ![]() блоктан тұратын
жүйенің қозғалысы динамика заңдарымен
өрнектеледі. Егер жүкшелер бірдей болса, онда жүйенің потенциалдық
энергиясы жүктердің көтерілген биіктігіне байланысты
болмайды, себебі біреуінің потенциалдық энергиясының кемуі
екіншісінің энергиясының артуына әкеліп соғады. Ал,
жүкшелер әртүрлі болған жағдайда,
жүйенің потенциалдық энергиясының өзгерісі
блоктан тұратын
жүйенің қозғалысы динамика заңдарымен
өрнектеледі. Егер жүкшелер бірдей болса, онда жүйенің потенциалдық
энергиясы жүктердің көтерілген биіктігіне байланысты
болмайды, себебі біреуінің потенциалдық энергиясының кемуі
екіншісінің энергиясының артуына әкеліп соғады. Ал,
жүкшелер әртүрлі болған жағдайда,
жүйенің потенциалдық энергиясының өзгерісі ![]() артық
жүктің
артық
жүктің ![]() орнының өзгерісіне
байланысты
орнының өзгерісіне
байланысты
![]() (1)
(1)
мұндағы ![]() - артық
жүктің орнының өзгерісі.
- артық
жүктің орнының өзгерісі.
Жүйенің потенциалдық энергиясы жүйенің ілгерілемелі және айналмалы қозғалысының кинетикалық энергиясына (үйкеліс күшіне қарсы істелетін жұмыс ескерілмейді) түрленеді.
![]() (2)
(2)
мұндағы ![]() - жүктің артық жүкшесіз кинетикалық
энергиясы;
- жүктің артық жүкшесіз кинетикалық
энергиясы;
![]() - жүктің артық
жүкпен бірге кинетикалық энергиясы;
- жүктің артық
жүкпен бірге кинетикалық энергиясы;
![]() - блоктың айналмалы
қозғалысының кинетикалық энергиясы.
- блоктың айналмалы
қозғалысының кинетикалық энергиясы.
Дискінің айналуының
бұрыштық ![]() жылдамдығын,
сызықтық
жылдамдығын,
сызықтық ![]() жылдамдықты
және
жылдамдықты
және ![]() екенін
ескерсек, онда жүйенің үдеуін анықтайтын өрнекті
алуға болады.
екенін
ескерсек, онда жүйенің үдеуін анықтайтын өрнекті
алуға болады.
![]() (3)
(3)
Егер 1-блоктың инерция моментін ескермесек, онда
![]() (4)
(4)
мұндағы, ![]() – жүйенің
толық массасы;
– жүйенің
толық массасы;
![]() – артық жүктің массасы.
Артық жүкті алғаннан кейін жүкшелер бірқалыпты
– артық жүктің массасы.
Артық жүкті алғаннан кейін жүкшелер бірқалыпты ![]() жылдамдығымен
қозғалады. Ол
жылдамдығымен
қозғалады. Ол ![]() ара қашықтығы
өзгермесе тұрақты болады, яғни
ара қашықтығы
өзгермесе тұрақты болады, яғни
![]() . (5)
. (5)
Бастапқы жылдамдықсыз бірқалыпты үдемелі қозғалыстың үдеуі
![]() (6)
(6)
мұндағы ![]() – бірқалыпты
қозғалыстың жылдамдығы болып табылатын
соңғы жылдамдық, сондықтан ол
– бірқалыпты
қозғалыстың жылдамдығы болып табылатын
соңғы жылдамдық, сондықтан ол ![]() формуласымен есептелінеді.
Ақырында, үдеуді анықтау үшін қажетті
өрнек мына түрде жазылады
формуласымен есептелінеді.
Ақырында, үдеуді анықтау үшін қажетті
өрнек мына түрде жазылады
![]() . (7)
. (7)
Ньютонның екінші заңын тексеру
тәсілдерінің бірі (5) өрнектің дұрыстығын
тексеру болады, бұл үшін жүйенің толық ![]() массасы
тұрақты болып қалып, ал әсер етуші күштің
мәні өзгеріп отыруы қажет. Сонда
массасы
тұрақты болып қалып, ал әсер етуші күштің
мәні өзгеріп отыруы қажет. Сонда
![]() (8)
(8)
мұндағы, ![]() – артық
жүктердің массалары.
– артық
жүктердің массалары.
3.2 Тәжірибе қондырғысы
Атвудтың РРМ-2 машинасы үш кронштейн бекітілген, масштабты сызғышы бар тік колоннадан тұрады (1-сурет). Колоннада үйкеліссіз айналатын жеңіл блок және электромагнит орналасқан. Блоққа ұштарына массалары бірдей жүктер бекітіліп байланған жеңіл жіп асылған.
Электромагнит жүгі бар блокты тыныштық күйде
ұстауға мүмкіндік береді. Ортаңғы кронштейн
артық жүкті ұстап қалатын сақинамен
жабдықталған. Сақина ортасымен жүк өте бергенде,
жүктің бірқалыпты қозғалысының ![]() уақытын
өлшейтін секундомер қосылады.
уақытын
өлшейтін секундомер қосылады.
Жүктің сәйкес
бірқалыпты және бірқалыпты үдемелі
қозғалыстарының ![]() және
және ![]() аралықтарын, сондай-ақ,
аралықтарын, сондай-ақ, ![]() уақытты
өлшеу арқылы, ілгерілемелі қозғалыс кинематикасы мен
динамикасының негізгі заңдарын тексеруге және еркін
түсу үдеуін есептеуге болады.
уақытты
өлшеу арқылы, ілгерілемелі қозғалыс кинематикасы мен
динамикасының негізгі заңдарын тексеруге және еркін
түсу үдеуін есептеуге болады.
3.3 Жұмыстың орындалу реті
3.1 Сурет
1-жаттығу. Бірқалыпты қозғалыс формуласын тексеру.
3.3.1. Қондырғыны қосып,
жүктің бірқалыпты қозғалысының ![]() биіктігін қойып,
ортаңғы және төменгі кронштейндердің
аралықтарын өлшеп, оны 3.1-кестеге жазу.
биіктігін қойып,
ортаңғы және төменгі кронштейндердің
аралықтарын өлшеп, оны 3.1-кестеге жазу.
3.3.2 Оқытушы жөн деген
артық жүкшелерді пайдаланып, әр түрлі бес ![]() аралық
үшін жүктердің бірқалыпты қозғалысының
аралық
үшін жүктердің бірқалыпты қозғалысының
![]() уақытын
өлшеу (жоғарғы және ортаңғы
кронштейндердің
уақытын
өлшеу (жоғарғы және ортаңғы
кронштейндердің ![]() аралығы өзгермейді. Алынған
мәліметтерді 3.1-кестеге жазу.
аралығы өзгермейді. Алынған
мәліметтерді 3.1-кестеге жазу.
3.1 К е с т е
|
h, м |
t, c |
V, м/с |
2-жаттығу. Бірқалыпты үдемелі қозғалыс формуласын тексеру.
3.3.3 Қозғалмалы кронштейндерді
жылжыта отырып, бірқалыпты үдемелі және бірқалыпты
қозғалыстың калаулы ![]() және
және ![]() аралықтарына қойып, оларды 3.2-кестеге
жазу.
аралықтарына қойып, оларды 3.2-кестеге
жазу.
3.2 Ке с т е
|
S, м |
h, м |
t, c |
а, м/с2 |
3-жаттығу. Ньютонның екінші заңын тексеру.
3.3.4 Ортаңғы және
төменгі кронштейндердің қандай да болмасын бір ![]() аралығын
қою.
аралығын
қою.
3.3.5 Оң жақтағы жүкшенің үстіне үш артықсалмақ жүкшелерін қою (олардың диаметрі сақинанікінен кем болуы керек) және олардың жалпы массасын 3.3-кестеге жазу.
3.3.6 Оң жақтағы
жүктерді ортаңғы кронштейн деңгейіне дейін
көтеріп апарып жіберіп, жүктің ![]() аралықты жүрген
аралықты жүрген ![]() уақытын
өлшеу.
уақытын
өлшеу.
3.3.7 Оң жаққа артық салмақтарды өзгерте отырып, өлшеуді тағы да екі рет жүргізу керек.
3.3 К е с т е
|
m, кг |
h, м |
t, c |
а, м/с2 |
3.4 Алынған мәліметтерді өңдеу
3.4.1 Бірқалыпты қозғалысты ((5) өрнекті) 3.1-кестедегі мәліметтер бойынша тексеру.
3.4.2 (7) өрнекті 3.2-кесте берілгендері бойынша тексеру.
3.4.3 (8) өрнекті 3.3-кестедегі мәліметтер үшін тексеру.
3.4.4 Жаттығулардың біреуі үшін алынған мәліметтердің дәлдігін бағалау.
3.4.5 Алынған мәліметтерді талдап, қорытынды жасау.
3.5 Бақылау сұрақтары
3.5.1 Атвуд машинасында жүктің бірқалыпты және бірқалыпты үдемелі қозғалатын бөліктерін көрсетіңіз.
3.5.2 Лездік жылдамдық дегеніміз не?
3.5.3 Жүк бірқалыпты және бірқалыпты үдемелі қозғалыс жасағанда жіптің тартылу күші неге тең?
3.5.4 Бірінші жаттығуды орындағанда жоғарғы және ортаңғы кронштейннің аралығы неге тұрақты болып қалуы тиіс?
3.5.5 Үшінші жаттығуды орындау барысында тәжірибеге қатысатын жүктердің жалпы массасы неге тұрақты болып қалуы керек?
4 ММФ-3 зертханалық жұмысы. Көлбеу маятник тәсілімен домалау үйкелісі коэффициентін анықтау
Жұмыстың мақсаты: домалау үйкелісі құбылысын тәжірибе жүзінде оқып үйрену.
Тапсырма: маятниктің көлбеулік бұрыштарының әр түрлі мәндеріне қарай металдар үшін домалау үйкелісі коэффициентін анықтау.
4.1 Тәжірибе әдістемесі
Бір денені екінші дененің бетімен салыстырмалы
түрде немесе бір дененің қабаттарын бір-біріне қатысты
орын ауыстырғанда Fүйк үйкеліс
күшімен өрнектелетін кедергі әсер етеді. Бұл
үйкеліс күші, беттесетін денелердің салыстырмалы орын
ауыстыруына қатысты тангенциалды бағытталады. Ол сан жағынан ![]() үйкеліс коэффициенті
мен нормаль бағытталған
үйкеліс коэффициенті
мен нормаль бағытталған ![]() қысым күшінің
көбейтіндісіне тең
қысым күшінің
көбейтіндісіне тең
Fүйк![]() .
.
Зерттеулер нәтижесі, үйкеліс коэффициенті тұрақты шама болып қалмайтындығын беттердің материалына, олардың микрогеометриялық тегістігіне, майлануына, ортаға және басқа да факторларға тәуелді екендігін көрсетті.
Құрғақ үйкеліс
тыныштық үйкелісі, сырғанау үйкелісі және домалау
үйкелісі күштеріне бөлінеді. Домалау үйкелісі бір дене
(шар) екінші дененің бетімен домалаған кезде пайда болады.
Бұл жағдайда серпінді деформациямен қатар пластикалық
деформация да пайда болады. Беттердің деформациясы салдарынан, бетке
перпендикуляр бағытталған ![]() реакция күшінің әсер
ету сызығы
реакция күшінің әсер
ету сызығы ![]() нормаль
бағытталған қысым күшінің әсер ету
сызығымен(нормаль бағытталған қысым күші
шардың салмағына тең) сәйкес келмейді (4.1-сурет).
нормаль
бағытталған қысым күшінің әсер ету
сызығымен(нормаль бағытталған қысым күші
шардың салмағына тең) сәйкес келмейді (4.1-сурет).
Реакция күшінің нормаль
құраушысы ![]() нормаль
бағытталған қысым күшімен теңгеріледі де, ал
горизонталь құраушысы домалау үйкеліс күші болып
табылады, яғни ол
нормаль
бағытталған қысым күшімен теңгеріледі де, ал
горизонталь құраушысы домалау үйкеліс күші болып
табылады, яғни ол ![]() .
.
Шардың бірқалыпты
қозғалысы кезінде мына ![]() нүктесіне қатысты домалау
үйкеліс күшінің моменті, тіреудің реакция
күшінің
нүктесіне қатысты домалау
үйкеліс күшінің моменті, тіреудің реакция
күшінің ![]() нормаль
құраушысының тиісу деформациялары салдарынан болатын
нормаль
құраушысының тиісу деформациялары салдарынан болатын ![]() ығысу
аралығына көбейтіндісіне тең болатын – моменттер ережесі
орындалуы тиіс.
ығысу
аралығына көбейтіндісіне тең болатын – моменттер ережесі
орындалуы тиіс.
Fүйк
![]()
мұндағы ![]() – шардың радиусы.
– шардың радиусы.
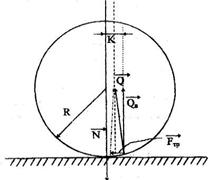
4.1 Сурет
![]() екенін ескерсек, домалау үйкелісі
күшін анықтауға арналған өрнек аламыз
екенін ескерсек, домалау үйкелісі
күшін анықтауға арналған өрнек аламыз
Fүйк
![]() (1)
(1)
Ұзындық өлшеміне ие
және ![]() күшінің
иіні болып табылатын
күшінің
иіні болып табылатын ![]() шамасы
домалау үйкелісі коэффициенті деп аталады.
шамасы
домалау үйкелісі коэффициенті деп аталады.
Бұл жұмыста үйкеліс
процесін зерттеу үшін көлбеу маятник тәсілі қолданылады.
Жіпке ілінген кішкене металл шар, көлбеулік ![]() бұрышын
өзгертіп отыруға болатын көлбеу жазықтыққа
тиіп жатады. Егер шарды тепе-теңдік қалпынан шығарып
жіберсе, онда ол көлбеу жазықтық бетімен домалай бастайды.
Оның қозғалысы, ең бастысы, сыртқы
үйкелістің әсерімен өшетін тербеліс сипатында болады.
бұрышын
өзгертіп отыруға болатын көлбеу жазықтыққа
тиіп жатады. Егер шарды тепе-теңдік қалпынан шығарып
жіберсе, онда ол көлбеу жазықтық бетімен домалай бастайды.
Оның қозғалысы, ең бастысы, сыртқы
үйкелістің әсерімен өшетін тербеліс сипатында болады.
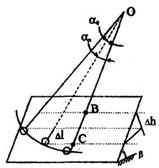
Көлбеу маятниктің көмегімен үйкеліс коэффициентін өлшеу тербеліс амплитудасының белгілі бір цикл санына сәйкес кемитіндігіне негізделген.
Маятник жасаған бір тербеліс (цикл) ішіндегі
шығындалатын ![]() энергия,
осы жолдағы үйкеліс күші істейтін
энергия,
осы жолдағы үйкеліс күші істейтін ![]() Fүйк
Fүйк ![]() жұмысқа
тең.
жұмысқа
тең.
Ортаның және жіптердің
кедергісін жеңуге жұмсалатын жұмысты ескермеу керек. Маятник
![]() рет
тербелгенде
рет
тербелгенде ![]() энергия
жоғалтады. (1) өрнекті
энергия
жоғалтады. (1) өрнекті
4.2 Сурет
ескерсек,
![]() (2)
(2)
деп жазуға болады, мұндағы ![]() - маятник массасы,
- маятник массасы, ![]() - маятниктің
ауырлық центрі биіктігінің шығыны, ол суреттен мына
формуламен
- маятниктің
ауырлық центрі биіктігінің шығыны, ол суреттен мына
формуламен
![]()
өрнектелуі мүмкін, мұндағы ![]() ;
;
![]() - маятниктің ауытқу
бұрышының бастапқы мезеттегі амплитудалық мәні;
- маятниктің ауытқу
бұрышының бастапқы мезеттегі амплитудалық мәні;
![]() - маятниктің
- маятниктің ![]() тербелістен кейінгі
ауытқу амплитудасы;
тербелістен кейінгі
ауытқу амплитудасы;
![]() - маятник ұзындығы.
- маятник ұзындығы.
Маятник ![]() тербеліс жасағанда,
оның ауырлық центрінің жүретін жолы
тербеліс жасағанда,
оның ауырлық центрінің жүретін жолы
![]() .
.
Бұл өрнектерді (2) қойып
және ауырлық күшінің нормаль құраушысы ![]() екенін ескерсек,
екенін ескерсек,
![]() (3)
(3)
мұндағы ![]() және
және ![]() –
бұрыштардың радианмен өлшенген мәндері.
–
бұрыштардың радианмен өлшенген мәндері.
4.2 Тәжірибе қондырғысы
«PPM-7 көлбеу маятнигі»
құралы домалау үйкелісі коэффициентін анықтауға
арналған. Көлбеу маятниктің жұмыс істеу принципі 4.1
және 4.2-суреттерде көрсетілген. Маятниктің көлбеу
бұрышы ![]() ,
мұндағы
,
мұндағы ![]() -
көлбеу жазықтық пен вертикальдың арасындағы
бұрыш. Құралдың фотоэлектрлік көрсеткіші (датчик)
секундомермен қосылғанда, олар тербеліс санын және оған
кеткен уақытты өлшейді. Кронштейнге ілінген кішкене шар бағыттаушының
көмегімен пластинка бетімен тербеледі (4.2-сурет).
Құралдың комплектінде әртүрлі металдардан
жасалған шарлар мен пластинкалардың жиыны бар.
-
көлбеу жазықтық пен вертикальдың арасындағы
бұрыш. Құралдың фотоэлектрлік көрсеткіші (датчик)
секундомермен қосылғанда, олар тербеліс санын және оған
кеткен уақытты өлшейді. Кронштейнге ілінген кішкене шар бағыттаушының
көмегімен пластинка бетімен тербеледі (4.2-сурет).
Құралдың комплектінде әртүрлі металдардан
жасалған шарлар мен пластинкалардың жиыны бар.
4.3 Жұмыстың орындалу реті
4.3.1 Оқытушы белгілеген үлгідегі шарды орнату.
4.3.2 Тіреуші винттердің көмегімен маятникті, оның жібі шкаланың нөлдік бөлігіне дәл келетіндей етіп орналастыру.
4.3.3 Маятник иінін 30○ бұрышқа көлбету. Кішкене шарды тепе-теңдік қалпынан α 0>6○-7○ бұрышқа ауытқытып жіберіп, тербеліс санын санау.
4.3.4 Маятниктің ауытқу
бұрышы қандай да болмасын бір ![]() мәніне дейін кеміген мезетте,
шариктің ауытқуының бастапқы және
соңғы бұрыштарын, сондай-ақ
мәніне дейін кеміген мезетте,
шариктің ауытқуының бастапқы және
соңғы бұрыштарын, сондай-ақ ![]() толық тербелістері санын
4.1-кестеге жазу.
толық тербелістері санын
4.1-кестеге жазу.
4.3.5 Жоғарыда аталған 3 және 4 баптарды бес реттен кем емес қайталау.
4.3.6 Өлшеуді ![]() және
және ![]() көлбеулік
бұрыштары үшін қайталау.
көлбеулік
бұрыштары үшін қайталау.
Өлшеу мәліметтерін 4.1-кестеге жазу.
4.1 К е с т е
|
|
|
|
|
|
|
|
|
4.4 Алынған мәліметтерді өңдеу
4.4.1 Домалау үйкелісі коэффициентін (3) формуланың көмегімен есептеу.
4.4.2 Аз өлшеулер тәсілі бойынша қателіктер бағасын шығару.
4.4.3 Эксперименттің осы тәсілін және алынған нәтижені талдап, қорытынды жасау.
4.5 Бақылау сұрақтары
4.5.1 Үйкеліс күштері. Тыныштық, сырғанау, домалау үйкелісі.
4.5.2 Маятниктің көлбеу
бұрышы 0○ ден ![]() дейін өзгергенде үйкеліс
күші қалай өзгереді? Мұнда үйкеліс коэффициенті
қалай өзгереді?
дейін өзгергенде үйкеліс
күші қалай өзгереді? Мұнда үйкеліс коэффициенті
қалай өзгереді?
4.5.3 Бұл жұмыстағы қателіктердің негізгі көзі не?
4.5.4 Жұмыстың жүргізілу әдістемесі.
5 ММФ-4 зертханалық жұмысы. Соқтығысу кезінде импульстың және энергияның сақталу заңдарын оқып үйрену
Жұмыстың мақсаты: шарлардың соқтығысу мысалы бойынша механикадағы сақталу заңдарын оқып үйрену.
Тапсырмалар:
- абсолют серпінді соққы үшін импульстің сақталу заңын тексеру;
- абсолют серпінсіз соққы үшін импульстің сақталу заңын тексеру;
- жылдамдық пен энергияның қалпына келу коэффициентін анықтау.
5.1 Тәжірибе әдістемесі
Соққы – жанасатын денелердің қозғалыс күйлерінің едәуір өзгерісіне әкеліп соғатын, олардың аз мерзімді өзара әсерлесуі. Соққы құбылысы техникада кең қолданылады. Лабораториялық практикумда оның көмегімен сақталу заңдарын оқып үйренеді, снарядтардың ұшу жылдамдықтары анықталады.
Өзара әсерлесуші шарларға импульстің сақталу заңын қолдана отырып (бірінші шар бір жылдамдықпен қозғалады да, ал екінші шар тыныштықта тұрған жағдай үшін) былай жазуға болады
cерпінді соққы үшін
![]() (1)
(1)
абсолют серпінсіз соққы үшін
![]() (2)
(2)
мұндағы ![]() - шарлар массасы;
- шарлар массасы;
![]() - бірінші шардың соқтығысуға дейінгі
жылдамдығы;
- бірінші шардың соқтығысуға дейінгі
жылдамдығы;
![]()
![]() ,
,![]() ,
,![]() - шарлардың соққыдан кейінгі
жылдамдықтары.
- шарлардың соққыдан кейінгі
жылдамдықтары.
Соққы кезіндегі механикалық
энергияның сейіліп шығындалуы жылдамдық ![]() мен энергияның
мен энергияның ![]() қалпына келу
коэффициенттерімен анықталады. Жылдамдықтың қалпына
келу коэффициенті шарлардың өзара алшақтау
жылдамдықтарының модулінің, олардың өзара
жақындау жылдамдықтарының модуліне қатынасымен
анықталады, яғни
қалпына келу
коэффициенттерімен анықталады. Жылдамдықтың қалпына
келу коэффициенті шарлардың өзара алшақтау
жылдамдықтарының модулінің, олардың өзара
жақындау жылдамдықтарының модуліне қатынасымен
анықталады, яғни
![]() (3)
(3)
Энергияның қалпына келу коэффициенті – соққыдан кейінгі кинетикалық энергия мен соққыға дейінгі кинетикалық энергиялардың қосындыларының қатынасына тең шама, яғни
![]() (4)
(4)
Қалпына келу коэффициенттерінің
шамасы соқтығысатын денелердің материалдарының
физикалық қасиеттеріне, олардың пішіні мен массасына
байланысты болады. Абсолют серпінді соққы үшін ![]() , ал абсолют серпінсіз
соққы үшін
, ал абсолют серпінсіз
соққы үшін ![]() , ал нақты жағдайлар
үшін 0<
, ал нақты жағдайлар
үшін 0<![]() <1.
Шарлардың соққыға дейінгі және
соққыдан кейінгі жылдамдықтарын әр шар үшін
механиканың сақталу заңынан табуға болады, тек
оның сейілуін ескермеу керек. Сонымен, α бұрышына
ауытқытылған бірінші шар үшін
<1.
Шарлардың соққыға дейінгі және
соққыдан кейінгі жылдамдықтарын әр шар үшін
механиканың сақталу заңынан табуға болады, тек
оның сейілуін ескермеу керек. Сонымен, α бұрышына
ауытқытылған бірінші шар үшін
![]()
мұндағы ![]() - шардың масса центрі
көтерілетін биіктік (5.1-сурет).
- шардың масса центрі
көтерілетін биіктік (5.1-сурет).

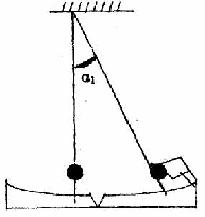
5.1 Сурет
Бұдан ![]() . Егер
. Егер ![]() және
және
![]() - екендігін
ескерсек,
- екендігін
ескерсек,
![]() . (5)
. (5)
Шарлардың соққыдан кейін ауытқитын бұрыштарын (α1 және α2) өлшеп алып, олардың жылдамдықтарын да осылай есептеуге болады, яғни
![]() ,
, ![]() . (6)
. (6)
5.2 Тәжірибе қондырғысы
Денелердің өзара әсерлесуін зерттеуге арналған РРМ-8 құралының негізгі бөлігі жіптерге байланған екі шардан, шкаласы бар бұрыштықтардан (олар шардың орнын бұрыштық өлшеммен көрсетеді) тұрады. Сонымен қатар құралда (5.2-сурет) теңестіруге, жіптің ұзындықтарын белгілі шамаға орнатуға мүмкіндік беретін тетіктер бар. Шарды бастапқы қалыпта ұстап тұру үшін электромагнит қолданылады.
5.2 Сурет
5.3 Жұмыстың орындалу реті
5.3.1 Тартпа жіптерге болат шарларды бұрап кигізіп, электромагнитті қажет орынға бекітіп қойып, қондырғыны қосу.
5.3.2 Оң шардың орнын
электромагнит арқылы белгілеу (![]() –оның ауытқу бұрышы).
Сол жақтағы шар тепе-теңдік қалыпта қалады.
–оның ауытқу бұрышы).
Сол жақтағы шар тепе-теңдік қалыпта қалады.
5.3.3 Электромагнит тізбегін токтан ажыратып,
екі шардың соққыдан кейінгі (![]() және
және ![]() ) ауытқуларын өлшеу.
) ауытқуларын өлшеу.
5.3.4 Өлшеуді бес рет қайталау керек. Мәліметтерді 5.1-кестеге жазу.
5.1 К е с т е
|
|
|
|
|
|
|
|
|
|
|
5.3.5 Болат шариктердің орнына пластилин шариктер алып, 2 - 4 баптарды қайталап, алынған нәтижелерді 5.2-кестеге жазу.
5.2 К е с т е
|
|
|
|
|
|
|
|
5.4 Алынған мәліметтерді өңдеу
5.4.1 Шарлардың соқтығысқанға дейінгі және соқтығыстан кейінгі жылдамдықтарын (5) және (6) формулалар бойынша есептеу.
5.4.2 Абсолют серпінді соққы үшін (1) импульстің сақталу заңын 5.1-кестедегі, ал абсолют серпінсіз соққы үшін (2) импульстің сақталу заңын 5.2-кестедегі мәліметтер бойынша тексеріп көру.
5.4.3 Серпінді және серпінсіз соққылар үшін жылдамдық пен энергияның қалпына келу коэффициенттерін (3) және (4) формулалар бойынша есептеңіздер.
5.4.5 Алынған нәтижелерге талдау жасап, қорытындыны тұжырымдау.
5.5 Бақылау сұрақтары
5.5.1 Оқшауланған жүйенің анықтамасын айтып беріңіз.
5.5.2 Дененің импульсі деген не?
5.5.3 Денелердің серпінді және серпінсіз әсерлесуі деген не?
5.5.4 Механикалық энергияның сақталу заңын тұжырымдаңыз.
5.5.6 Жұмысты орындау әдістемесі.
6 ММФ-5 зертханалық жұмысы. Максвелл маятнигінің инерция моментін анықтау
Жұмыстың мақсаты: қатты дененің жазық қозғалысы мысалы арқылы қатты денелер механикасы заңдарын оқып үйрену.
Тапсырмалар:
- Максвелл маятнигінің инерция моменті мәнін анықтау;
- Максвелл маятнигінің инерция моменті мәнін теориялық формуламен есептеу;
- Алынған мәндерді салыстыру.
6.1 Тәжірибе әдістемесі
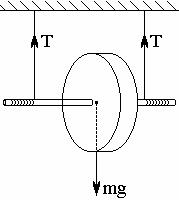
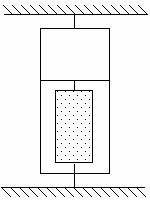
Максвелл маятнигі жеңіл түтікке
нығыздалып кигізіліп, сол түтік арқылы екі жіпке ілінген
дискіден тұрады (6.1-сурет). Егер жіптерді дискіге симметриялы
түрде орап,  биіктікке
көтеріп қоя берсе, онда дискі горизонталь осьті айнала отырып,
төмен түседі. Мұнда дискінің барлық
нүктелерінің траекториясы паралель жазықтықтар
үстінде жатады. Қатты дененің мұндай қозғалысы
жазық қозғалыс деп аталады. Бұл қозғалысты
дискінің масса центрінің жылдамдығымен болатын ілгерілемелі
және сонымен бір мезгілде осы центр арқылы өтетін осьті
айнала қозғалыстар деуге болады.
биіктікке
көтеріп қоя берсе, онда дискі горизонталь осьті айнала отырып,
төмен түседі. Мұнда дискінің барлық
нүктелерінің траекториясы паралель жазықтықтар
үстінде жатады. Қатты дененің мұндай қозғалысы
жазық қозғалыс деп аталады. Бұл қозғалысты
дискінің масса центрінің жылдамдығымен болатын ілгерілемелі
және сонымен бір мезгілде осы центр арқылы өтетін осьті
айнала қозғалыстар деуге болады.
Масса центрінің қозғалысы және берілген осьті айнала болатын қозғалыстардың теңдеулері
![]() , (1)
, (1)
![]() (2)
(2)
мұндағы ![]() – маятниктің массасы;
– маятниктің массасы;
![]() – оның инерция моменті;
– оның инерция моменті;
![]() – масса центрінің үдеуі;
– масса центрінің үдеуі;
![]() – маятниктің бұрыштық
үдеуі;
– маятниктің бұрыштық
үдеуі;
![]() – жіптің тартылу күші;
– жіптің тартылу күші;
![]() – түтікшенің радиусы (тартылу
күшінің иіні).
– түтікшенің радиусы (тартылу
күшінің иіні).
Берілген жағдайлардағы
үдеулер арасындағы байланыс ![]() болғандықтан, (1) және (2) өрнектерінен
болғандықтан, (1) және (2) өрнектерінен
 (3)
(3)
Соңғы өрнектен
маятниктің масса центрі оның инерция моментіне тәуелді
болатын тұрақты үдеумен қозғалатыны шығады.
Міне, осы жағдайдың дәл өзі қарастырылып
отырған әдістеменің негізі болып табылады. (3) өрнектен
![]() екенін
ескере отырып
екенін
ескере отырып
 ,
(4)
,
(4)
есептеу формуласын аламыз, мұндағы ![]() .
.
Сонымен, Максвелл маятнигінің инерция моментін
анықтау үшін берілген ![]() биіктіктен
биіктіктен ![]() құлау уақытын
өлшеу, маятниктің
құлау уақытын
өлшеу, маятниктің ![]() массасын, түтікшенің
массасын, түтікшенің ![]() диаметрін
және жіптің
диаметрін
және жіптің ![]() жуандығын анықтау
қажет.
жуандығын анықтау
қажет.
6.2 Тәжірибе қондырғысы
«Максвелл маятнигі ҒРМ-03»
құралы маятниктен (жоғарыда сипатталған),
электромагниттен, электрондық миллисекундомермен қосылған
фотоэлектрлік екі датчиктен тұрады. Құралдың
комплектіне кіретін қосалқы сақиналардың арасында
маятник дискісіне әртүрлі сақина кигізу рқылы
оның массасын өзгертуге болады. Бойына электр тогы жүргенде
электромагнит маятникті жоғары күйде ұстап тұрады.
Маятник жібінің ұзындығы (![]() биіктігі) вертикаль бағандағы
миллиметрлік шкаламен өлшенеді. Миллисекундо-мердің бет пердесінде
айырып-қосқыштар СЕТЬ, ПУСК, СБРОС және сандық
көрсеткіш (индикатор) орналасқан.
биіктігі) вертикаль бағандағы
миллиметрлік шкаламен өлшенеді. Миллисекундо-мердің бет пердесінде
айырып-қосқыштар СЕТЬ, ПУСК, СБРОС және сандық
көрсеткіш (индикатор) орналасқан.
6.1 Сурет
6.3 Жұмыстың орындалу реті
6.3.1 Құралды түзетіп, оны тоқ көзіне қосу.
6.3.2 Төменгі күйде болат сақинаның шеті ф/э көрсеткіштің жарық шоғын толық жабатындай болып және оның осі горизонталь болатындай етіліп жіп ұзындықтарын реттеу .
6.3.3 Жіпті біркелкі етіп, бір қабаттан орай отырып, ең жоғарғы күйде электромагнитпен бекіту. ПУСК түймесі бос тұруы керек.
6.3.4 Бірінен кейін бірін, СБРОС және ПУСК түймелерін басу арқылы маятник босатылады да, миллисекундомер қосылады.
6.3.5 Миллисекундомердің көрсетуін санап алу керек. Тәжірибені 5 реттен кем емес қайталау керек. Өлшеу нәтижелерін 6.1-кестеге жазыңыздар.
6.3.6 Штангенциркульмен түтікшенің
![]() ,
дискінің
,
дискінің ![]() , сақинаның сыртқы
, сақинаның сыртқы ![]() диаметрлерін
өлшеп, жіптің
диаметрлерін
өлшеп, жіптің ![]() жуандығын анықтау.
жуандығын анықтау.
6.1 К е с т е
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6.4 Алынған мәліметтерді өңдеу
6.4.1 Түтікшенің ![]() , дискінің
, дискінің ![]() және
сақинаның
және
сақинаның ![]() жазылған сәйкес
мәндерін алып, маятниктің
жазылған сәйкес
мәндерін алып, маятниктің ![]() массасын есептеу.
массасын есептеу.
6.4.2 Тәжірибе жүзінде
алған уақыттың ![]() әр мәні үшін (4)
формуладан
әр мәні үшін (4)
формуладан ![]() инерция
моментінің мәнін есептеу.
инерция
моментінің мәнін есептеу.
6.4.3 Инерция моменті шамасының ![]() орташа
арифметикалық мәнін есептеп және оның
орташа
арифметикалық мәнін есептеп және оның ![]() сенімділік
ықтималдығы үшін
сенімділік
ықтималдығы үшін ![]() кездейсоқ қателігін
бағалау.
кездейсоқ қателігін
бағалау.
6.4.4 Маятниктің инерция моменті мәнін мына формуладан тауып,
![]() (5)
(5)
оны ![]() мәнімен салыстыру керек.
мәнімен салыстыру керек.
6.5 Бақылау сұрақтары
6.5.1 Максвелл маятнигінің белгілі ![]() биіктіктен
құлау уақыты неге байланысты болады?
биіктіктен
құлау уақыты неге байланысты болады?
6.5.2 Маятниктің масса центрі қалай қозғалады? Оның үдеуі неге байланысты?
6.5.3 Ең жоғарғы орында маятниктің механикалық энергиясы неге тең? Төменгі нүктені өткен мезетте ше? Осы мәндердің ара қатынасы қалай?
6.5.4 Тәжірибеде орын алатын қателіктер көзін атаңыздар.
7 ММФ-6 зертханалық жұмысы. Бұралу тербелістері көмегімен қатты денелердің инерция моментін анықтау
Жұмыстың мақсаты: айналмалы қозғалыс динамикасы заңдарына негізделген қатты денелер инерциясы моментін анықтау тәсілдерін игеру.
Тапсырмалар:
- бұралу тербелісті маятникке денелерді қойғанда оның тербеліс периодын анықтау;
- тербеліс периодтары мәндері бойынша денелердің инерция моменттерін есептеу.
7.1 Тәжірибе әдістемесі
Бұралмалы маятник дегеніміз тік бағытта тартылған болат сымға бекітілген дене. Маятникті сымның бойымен бағытталған осьті айнала бұрғанда, сымда моменті бұрылу бұрышына пропорционал болатын серпінді күштер пайда болады, яғни
![]() (1)
(1)
мұндағы ![]() - сымның радиусына
және ұзындығына, сондай-ақ ол жасалынған заттың
серпінділік қасиеттеріне байланысты болатын коэффициент.
- сымның радиусына
және ұзындығына, сондай-ақ ол жасалынған заттың
серпінділік қасиеттеріне байланысты болатын коэффициент.
Берілген жағдай үшін айналмалы қозғалыстың динамикасы теңдеуі
![]() (2)
(2)
Бұрыштық үдеудің анықтамасын ескеріп және қарапайым түрлендіру нәтижесінде
![]() (3)
(3)
Бұл теңдеу, периоды:
![]() (4)
(4)
болатын бұралу тербелісінің дифференциалдық теңдеуі болып табылады.
Ұсынылып отырған әдістеменің негізінде бұралу тербелісінің сымға ілінген дененің инерция моментіне тәуелділігі жатыр. Әдетте сымға, оған құрылыс пішіні түрліше денелерді ілуге болатын рамка бекітіледі. Бұл рамканың инерция моменті Iр . Егер оған зерттеліп отырған инерция моменті Iү үлгі денені бекіткенде, онда мұндай маятниктің тербеліс периоды
![]() (5)
(5)
Есептеу формуласынан белгісіз Iр және k шамаларын аластау үшін бос рамканың тербеліс периодын Тү және инерция моменті Iэ белгілі эталон үлгі дененің Тэ тербеліс периодын өлшеу керек. Сонда
![]() (6)
(6)
![]() (7)
(7)
Соңғы арақатынастардан зерттеліп отырған үлгі дененің инерция моментін есептеу формуласы шығады, яғни
 (8)
(8)
7.2 Тәжірибе қондырғысы
Құрылғы (7.1-сурет) екі кронштейннің арасына бекітілген жеңіл рамкасы бар, болат сымнан, электромагниттен, миллисекундомерден және санағыштан тұрады. Миллисекундомер мен санағыш фотоэлементке қосылған. Қондырғы қорында үш үлгі дене бар да, ал соның біреуі эталондық үлгі болып табылады.
Рамканың екі шетінде де магнит заттан жасалған екі жалауша бар.
Секундомердің бет жағында нүктелік айырып-қосқыштар СЕТЬ, ПУСК, СБРОС және СТОП , сондай-ақ t уақытын және n тербеліс санын көрсететін сандық көрсеткіш (цифровые индикаторы) бар.
7.1 Сурет
7.3 Жұмыстың орындалу реті
7.3.1 Құралды түзетіп, оны ток көзіне қосу.
7.3.2 Рамкаға зерттелетін үлгіні қою.
7.3.3 Рамканы бұрып, оның жалаушасын электромагнитке жақындату. Электромагнит өзіне жалаушаны тартып, маятник бастапқы күйге келеді.
7.3.4 Ретімен СБРОС және ПУСК түймелерін басу. Электромагнит тізбегі бұл жағдайда ажыратылады да, маятник еркін тербеліс жасай бастайды.
7.3.5 Толық 20-30 тербелістің ![]() уақытын
анықтау. Бұл үшін санағышта тербеліс саны бірге кем сан
пайда болғанда СТОП түймесін басу керек. Санағыш
тоқтағаннан кейін секундомер көрсетуін кестеге жазу керек.
уақытын
анықтау. Бұл үшін санағышта тербеліс саны бірге кем сан
пайда болғанда СТОП түймесін басу керек. Санағыш
тоқтағаннан кейін секундомер көрсетуін кестеге жазу керек.
7.3.6 Зерттелген үлгі денені эталонмен алмастырып, n толық тербелістің tэ уақытын анықтау (3-5 баптарды қара).
7.3.7 Үлгілердің бәрін алып
тастап, бос рамканың толық ![]() тербелісі уақытын
тербелісі уақытын ![]() табу
керек. Әр тәжірибені үштен кем емес етіп қайталау
керек.
табу
керек. Әр тәжірибені үштен кем емес етіп қайталау
керек.
7.1 К е с т е
|
№ |
|
t0, c |
tэ, c |
tp, c |
T0, c |
Tэ, c |
Тр, с |
I0,
|
|
|
|
|
|
|
|
|
|
|
7.4 Алынған мәліметтерді өңдеу
7.4.1 Формула ![]() бойынша Тү, Тэ және
Тр периодтарын және олардың <Тү>,
<Тэ>, <Тр> орташа мәндерін есептеу
керек.
бойынша Тү, Тэ және
Тр периодтарын және олардың <Тү>,
<Тэ>, <Тр> орташа мәндерін есептеу
керек.
7.4.2 Формула (8) бойынша зерттеліп отырған үлгі дененің Iү инерция моментін сәйкес периодтардың орташа мәндерін қою арқылы есептеу керек.
Ескерту: эталон үлгінің инерция моменті “Механика және молекулалық физика” лабораториясының анықтамалық стендінде берілген.
7.5 Бақылау сұрақтары
7.5.1 Денелердің инерция моментін тәжірибе жүзінде анықтау әдістемесі негізінде не жатыр?
7.5.2 Осы тәжірибе барысында қателіктердің көздері нелер болып табылады?
8 ММФ-7 зертханалық жұмысы. Баллистикалық бұралмалы маятник арқылы снарядтың ұшу жылдамдығын анықтау
Жұмыстың мақсаты: сақталу заңдарын қолдану негізінде денелердің жылдамдықтарын анықтау әдісімен танысу.
Тапсырмалар:
- импульс моментінің және энергияның сақталу заңдарын қолдану мүмкіндіктерін оқып үйрену;
- снарядтың ұшу жылдамдығын анықтау.
8.1 Тәжірибе әдістемесі
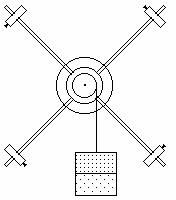
Баллистикалық бұралмалы маятник деген горизонталь жазықтықта тербелмелі қозғалыс жасау мүмкіндігі бар, тік бағытта тартылған болат сымға ілінген стержень болып табылады. Стерженьнің шеттерінде пластилинмен толтырылған екі нысана бар. Сондай-ақ, стерженьде оның бойымен кез келген орынға жылжытуға болатын бірдей екі цилиндр пішінді жүкшелер бар (8.1-сурет).
Нысанаға ![]() жылдамдықпен горизонталь ұшып
келе жатқан снаряд тигенде маятник өз өсін айнала
жылдамдықпен горизонталь ұшып
келе жатқан снаряд тигенде маятник өз өсін айнала ![]() бастапқы
бұрыштық жылдамдықпен айналып, тепе-теңдік
қалыптан ауытқиды. Импульс моментінің сақталу
заңы бойынша
бастапқы
бұрыштық жылдамдықпен айналып, тепе-теңдік
қалыптан ауытқиды. Импульс моментінің сақталу
заңы бойынша
![]() (1)
(1)
мұндағы ![]() – снарядтың
массасы;
– снарядтың
массасы;
![]() – оның импульсінің иіні (ол
осьтен снарядтың нысанаға тиген орнына дейінгі аралыққа
тең);
– оның импульсінің иіні (ол
осьтен снарядтың нысанаға тиген орнына дейінгі аралыққа
тең);
![]() – маятниктің инерция моменті.
– маятниктің инерция моменті.
Маятник бұрылған кезде, ол ілінген болат сым бұралады. Бұл сымда моменті маятниктің φ бұрылу бұрышына пропорционал болатын серпінділік күштері пайда болады, яғни
![]() (2)
(2)
мұндағы ![]() – сымның
ұзындығына, радиусына және затына байланысты болатын
коэффициент. Маятник серпінді күштердің әсерімен периоды мына
өрнекпен анықталатын бұралу тербелісін жасайды, яғни
– сымның
ұзындығына, радиусына және затына байланысты болатын
коэффициент. Маятник серпінді күштердің әсерімен периоды мына
өрнекпен анықталатын бұралу тербелісін жасайды, яғни
![]() . (3)
. (3)
Маятниктің соққы кезінде алған кинетикалық энергиясы сымның серпінді деформациясының потенциалдық энергиясына айналады. Егер маятниктің қозғалысы кезіндегі энегияның (ауаның кедергісі салдарынан) шығынын ескермесек, онда механикалық энергияның сақталу заңын төмендегідей жазуға болады.
![]() (4)
(4)
мұндағы ![]() –маятниктің
соққыдан кейін бұрылатын бұрыштың максимал
мәні.
–маятниктің
соққыдан кейін бұрылатын бұрыштың максимал
мәні.
(1) және (3) өрнектерден
![]() (5)
(5)
аламыз. Бұл (5) өрнегінде ![]() екені ескерілген,
яғни снарядтың инерция моменті өте аз екен.
екені ескерілген,
яғни снарядтың инерция моменті өте аз екен.
Жылдамдықты есептеу формуласынан бізге
белгісіз ![]() және
және
![]() шамаларын
аластау үшін жүкшелердің айналу осінен
шамаларын
аластау үшін жүкшелердің айналу осінен ![]() және
және ![]() қашықтықтардағы
орындары үшін маятниктің тербелістің
қашықтықтардағы
орындары үшін маятниктің тербелістің ![]() және
және ![]() мәндерін
өлшеу қажет. Сонда есептеу формуласының түрі
мәндерін
өлшеу қажет. Сонда есептеу формуласының түрі
![]() (6)
(6)
болады. Мұндағы ![]() – жүкшенің массасы.
– жүкшенің массасы.
Сонымен, снарядтың ұшу
жылдамдығын анықтау бұл тәсілде импульс моменті мен
механикалық энергияның сақталу заңын
қолдануға негізделген.Оның тоқ етері, екі
ұқсас тәжірибе жасауда болып тұр: біріншісі, жүкшелер
оське қатысты симметриялы және ең жақын ![]() қашықтықта
тұрғанда, снаряд соққысынан маятниктің
қашықтықта
тұрғанда, снаряд соққысынан маятниктің ![]() ауытқу
бұрышын және осы күй үшін тербеліс периодын
ауытқу
бұрышын және осы күй үшін тербеліс периодын ![]() анықтау; ал
екіншісі: жүкшелер басқа
анықтау; ал
екіншісі: жүкшелер басқа ![]() қашықтықта
тұрған кезде сол бұрыш
қашықтықта
тұрған кезде сол бұрыш ![]() үшін
үшін ![]() тербеліс периодын анықтау
болады.
тербеліс периодын анықтау
болады.
8.2 Тәжірибе қондырғысы
“FRM-09 бұралмалы баллистикалық маятнигі” құралы жоғарыда сипатталған маятниктен, ататын қондырғыдан , фотоэлектрлік датчиктен және онымен қосылған электрондық секундомерден, сондай-ақ, тербелістерді санағыштан тұрады. Сонымен бірге шкаласы бар мөлдір экран орнатылған. Секундомердің бет жағында СЕТЬ, СБРОС, СТОП айырып-қосқыштар бар.
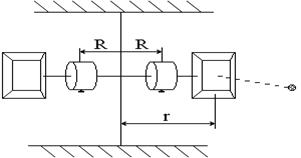
8.1 Сурет
8.3 Жұмыстың орындалу реті
8.3.1 Құралды түзету.
8.3.2 Екі жүкшені бір-біріне максимал
жақындату, яғни оларды оське тақап, олардың центрлеріне
дейінгі ![]() аралықты
өлшеу.
аралықты
өлшеу.
8.3.3 Маятникті нысананың жағындағы сызық шкаланың нөліне дәл келетіндей етіп, нөлдік күйге келтіру. Құралды тоқ көзіне қосу.
8.3.4 Снарядты ататын қондырғыға қойып, оны ату.
8.3.5 Снаряд нысанаға тигеннен кейін
маятниктің максимал ![]() бұрылу бұрышын өлшеп, оны
радианға айналдыру.
бұрылу бұрышын өлшеп, оны
радианға айналдыру.
8.3.6 Маятниктің ![]() тербелісінің
тербелісінің ![]() уақытын
анықтау.
уақытын
анықтау.
8.3.7 Айналу осінен снарядтың тұрып қалған орнына дейінгі r аралығын анықтау.
8.3.8 Жүкшелерді максимал
аралыққа алшақтату керек те, ![]() аралығын
өлшеу.
аралығын
өлшеу.
8.3.9 Маятникті ![]() бұрышына ауытқытып, СБРОС түймесін басып, сонан
соң маятникті босатып, n1 тербелістің t1
уақытын табу.
бұрышына ауытқытып, СБРОС түймесін басып, сонан
соң маятникті босатып, n1 тербелістің t1
уақытын табу.
8.3.10 Әрбір тәжірибені үш реттен кем емес рет қайталау. Өлшеу нәтижелерін 8.1-кестеге жазу.
8.1 К е с т е
|
№ |
j m, рад. |
R, м |
t, c |
n |
<T>, c |
t1, c |
n1 |
<T1>,c |
R1, м |
r, м |
v, м/ с |
<v>, м/ с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8.4 Алынған мәліметтерді өңдеу
8.4.1 Әр тәжірибе үшін ![]() және
және ![]() формулалары бойынша
тербелістердің периодтарын есептеп,
формулалары бойынша
тербелістердің периодтарын есептеп, ![]() және
және ![]() орташа мәндерін табу керек.
орташа мәндерін табу керек.
8.4.2 Тәжірибеден алынған ![]() мәнінің әрқайсысын және
мәнінің әрқайсысын және ![]() ,
, ![]() орташа мәндерді (5)
формулаға қойып,
орташа мәндерді (5)
формулаға қойып, ![]() жылдамдықты есептеу.
жылдамдықты есептеу.
8.4.3 Жылдамдықтың ![]() орташа мәнін
есептеу.
орташа мәнін
есептеу.
Ескерту. Жүкшелердің ![]() массасы мен
снарядтың
массасы мен
снарядтың ![]() массасы
«Механика және молекулалық физика» лабораториясының
анықтамалық стендінде берілген.
массасы
«Механика және молекулалық физика» лабораториясының
анықтамалық стендінде берілген.
8.5 Бақылау сұрақтары
8.5.1 Қандай да болмасын бір ![]() осі арқылы
жүйенің импульс моменті қандай жағдайда
сақталады?
осі арқылы
жүйенің импульс моменті қандай жағдайда
сақталады?
8.5.2 Жүйенің механикалық энергиясы қандай жағдайда сақталады?
8.5.3 Баллистикалық бұралмалы маятник – снаряд жүйесінің (снаряд нысанаға тиген жағдайда) механикалық энергиясы сақтала ма?
8.5.4 Қандай жағдайда айналу осінен снарядтың нысанаға тиген орнына дейінгі аралықты снарядтың импульсінің иіні деуге болады?
8.5.5 Берілген құрылғыда қандай жайлар мен факторлар тәжірибенің дәлдігін қамтамасыз етеді?
9 ММФ-8 зертханалық жұмысы. Обербек маятнигі арқылы айналмалы қозғалыс динамикасын оқып үйрену
Жұмыстың мақсаты: бекітілген осі бар қатты дененің айналмалы қозғалыс динамикасы заңын (теңдеуін) тексеру.
Тапсырмалар:
- сыртқы күштің ![]() моментінің,
айналушы дененің
моментінің,
айналушы дененің ![]() бұрыштық үдеуінің
және оның
бұрыштық үдеуінің
және оның ![]() инерция моменті мәндерін
анықтау;
инерция моменті мәндерін
анықтау;
- айналмалы қозғалыс динамикасы
заңынан шығатын қатынасты а) ![]() ; б)
; б) ![]() жағдайлары үшін
тексеру.
жағдайлары үшін
тексеру.
9.1 Тәжірибе әдістемесі
Қатты дененің бекітілген оське қатысты айналмалы қозғалыс динамикасының теңдеуі
![]() (1)
(1)
мұндағы ![]() – дененің
– дененің ![]() айналу осіне
қатысты инерция моменті;
айналу осіне
қатысты инерция моменті;
![]() – бұрыштық үдеудің
– бұрыштық үдеудің
![]() осіне проекциясы;
осіне проекциясы;
![]() – сыртқы күштердің
– сыртқы күштердің ![]() осіне қатысты
моменттер қосындысы.
осіне қатысты
моменттер қосындысы.
(1) теңдеуінен, егер дене ![]() күш моменті
әсерімен бекітілген оське қатысты
күш моменті
әсерімен бекітілген оське қатысты ![]() үдеуімен айналса, онда
үдеуімен айналса, онда ![]() күш
моменті әсер еткенде
күш
моменті әсер еткенде ![]() бұрыштық
үдеумен айналатыны шығады және дененің инерция моменті
өзгермеген жағдайда (
бұрыштық
үдеумен айналатыны шығады және дененің инерция моменті
өзгермеген жағдайда (![]() ) берілген оське қатысты мына
) берілген оське қатысты мына
![]() (2)
(2)
қатынас орын алады. Сондай-ақ, (1)
теңдеуден бірдей күш моменттерінің әсерімен инерция
моменттері ![]() және
және
![]() денелердің
денелердің
![]() және
және
![]() үдеулері
үшін мына қатынас орындалатыны шығады,
үдеулері
үшін мына қатынас орындалатыны шығады,
![]() .
(3)
.
(3)
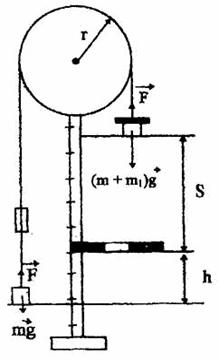
Жоғарыдағы (2) және (3)
қатынастары Обербек маятнигінде іске асады. Обербек маятнигі бір шкивке
бекітілген төрт стерженьнен тұратын маховик тәрізді
құрылғы, ол горизонталь осьті айнала алады (8.1-сурет).
Бұл осьте екібаспалдақты дискі бар, оған жіп оралады.
Жіптің екінші ұшына жүк ілінеді. Жіпті дискіге орағанда
![]() биіктікке
көтеріледі. Жүкті қоя бергенде, жіп дискіден
тарқатылып, маховикті айналдырады.
биіктікке
көтеріледі. Жүкті қоя бергенде, жіп дискіден
тарқатылып, маховикті айналдырады.
Жүкке ауырлық күші және оған қарсы бағытталған жіптің тартылу күші әсер етеді. Осы күштердің тең әсерлі күшінің әсерімен жүк, Ньютонның II заңы бойынша, тұрақты үдеумен қозғалады
![]() .
(4)
.
(4)
Бұл жағдайда үдеу, жүрілген жол және қозғалыс уақыты мына формуламен байланысқан
![]() (5)
(5)
(4) теңдеуден (5) өрнекті ескере отырып мынаны аламыз
![]() . (6)
. (6)
Жіптің тартылу күші айналдырушы момент тудырады, яғни
![]() . (7)
. (7)
Ол маховикке бұрыштық үдеу береді. Бұрыштық үдеу мен тангенциалды үдеудің және дискінің радиусының араларындағы байланыс
![]() . Жіп
созылмайтын және тайғанамаған жағдайда
тангенциалдық үдеу жүктің үдеуіне тең
болады, яғни
. Жіп
созылмайтын және тайғанамаған жағдайда
тангенциалдық үдеу жүктің үдеуіне тең
болады, яғни
![]() .
.
Ендеше
![]() .
(8)
.
(8)
Обербек маятнигінің инерция моментін есептеу формуласын қорыту үшін энергияның сақталу заңын пайдаланамыз
![]() .
(9)
.
(9)
Бастапқы жылдамдығы жоқ бірқалыпты үдемелі қозғалыс үшін
![]() ,
(10)
,
(10)
![]() ,
(11)
,
(11)
екендерін ескеріп, ізделініп отырған есептеу формуласын аламыз
 .
(12)
.
(12)
Сонымен, (2) және (3) өрнектерін тексеру үшін берілген биіктіктен жүктің құлау уақытын, дискінің радиусын және жүктің массасын өлшеп, (7), (8) және (12) формулалар бойынша сәйкес шамаларды есептеу қажет екен.
9.2 Тәжірибе қондырғысы
Қондырғы айқасқан стерженьдерден (крестовина), екібаспалдақты дискіден, тежегіш электромагниттен және екі фотоэлектрлік датчикпен қосылған әмбебап электрондық миллисекундомерден тұрады. Сондай-ақ, жіп артылған жеңіл блок бар. Жіптің бір ұшы дискіге байланған да, ал екінші ұшына жүк ілінген (массалары әртүрлі жүктер бар). Комплектте стерженьдерге кидіріліп, оның бойымен қалаған орынға бекітіп, маятниктің инерция моментін өзгертетін бірдей төрт цилиндр пішінді жүкше бар.
9.1 Сурет
Тежеуші электромагнит оны ток көзіне қосқанда маховикті жүктерімен бірге тыныштық күйде ұстап тұра алады. Жүк құлап бара жатып, жарық сәулесін қалқалап, оны үзгенде жоғарғы ф/э датчик уақытты санау басталуының электр импульсін жібереді, ал екінші ф/э датчик жанынан өткенде уақыт өлшеудің соңын белгілеп, тежеуші электромагнитті іске қосады. Секундомердің бет жағында СЕТЬ, ПУСК, СБРОС айырып-қосқыштары және секундомердің көрсетуін жарықтандыратын сандық индикаторлар орналасқан.
9.3 Жұмыстың орындалу реті
1-жаттығу: жоғарыда көрсетілген (2) қатынасын тексеру.
9.3.1 Құралды түзетіп, оны электр жүйесіне қосу.
9.3.2 Жіпке массасы ![]() жүкті
ілу.
жүкті
ілу.
9.3.3 Крестовинаны айналдыра отырып, жіпті
дискінің бір баспалдағына орап, жүкті ![]() биіктікке көтеру.
Мұнда жүктің шеті жоғарғы ф/э датчиктің
корпусындағы сызықтың деңгейінде орналасуы керек.
биіктікке көтеру.
Мұнда жүктің шеті жоғарғы ф/э датчиктің
корпусындағы сызықтың деңгейінде орналасуы керек.
9.3.4 ПУСК түймесін босатып, электромагнитті ажырату.
9.3.5 СБРОС түймесін басып, артынан ПУСК түймесін қосып, маятникті қозғалысқа келтіріп және секундомердің санауын бастау.
9.3.6 Маятник тоқтағаннан кейін секундомердің көрсетуін алып, оны 9.1-кестеге жазу.
9.3.7 Маятниктің бағанында орналасқан миллиметрлік шкала арқылы h биіктігін, жүктің жүрген жолын анықтап, 9.1-кестеге жазу.
9.1 К е с т е
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9.3.8 СБРОС түймесін басып, тәжірибені (3-6 б.) кемінде үш рет қайталау керек.
9.3.9 Тағы да бір немесе екі
жүкше қосып, массасы ![]() жүк үшін (3-8 б.)
уақытты өлшеу.
жүк үшін (3-8 б.)
уақытты өлшеу.
9.3.10 Штангенциркульмен
қолданылған дискі баспалдағының диаметрін өлшеп,
оның ![]() радиусын
анықтау.
радиусын
анықтау.
2-жаттығу: жоғарыда көрсетілген (3) қатынасын тексеру.
9.3.11 Жіпке жалпы массасы ![]() екі немесе үш
жүкше іліп, олардың мәнін 9.2-кестеге жазу.
екі немесе үш
жүкше іліп, олардың мәнін 9.2-кестеге жазу.
9.3.12 Цилиндр жүкшелерді стерженьдерге кигізіп, оларды стержень ұштарынан қандай да бір аралыққа (2-5 см) орналастыру. Мұнда маховик талғаусыз (жіптің бос күйінде) тепе-теңдікте болуы қажет.
9.3.13 Жүктің ![]() биіктіктен
құлауының
биіктіктен
құлауының ![]() уақытын үш реттен кем
емес өлшеу (3-8 б.).
уақытын үш реттен кем
емес өлшеу (3-8 б.).
9.3.14 Стерженьдердегі жүкшелерді шкивке қарай жылжытып орналастыру. Жүктің бұл орындарында да маховик талғаусыз тепе-теңдікте болуы керек.
9.3.15 Жүктің ![]() биіктіктен
құлауының
биіктіктен
құлауының ![]() уақытын (үш реттен кем
емес) өлшеу.
уақытын (үш реттен кем
емес) өлшеу.
Алынған мәліметтерді 9.2-кестеге жазу керек.
9.2 К е с т е
|
№ |
|
|
|
Стерженьдегі жүкшелер орындары |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9.4 Алынған мәліметтерді өңдеу
9.4.1 9.1-кестеге жазылған өлшеулер нәтижесін пайдаланып:
а) массалары m1 және m2
жүктерінің қозғалыстарының
уақыттарының ![]() және
және ![]() орташа мәндерін;
орташа мәндерін;
б) (7) және (8) формулаларға
<t1> және <t2> сәйкес орташа
мәндерін қойып, ![]() және
және ![]() ,
, ![]() және
және ![]() мәндерін;
мәндерін;
в) ![]() және
және ![]() қатынастарын
есептеңіздер.
қатынастарын
есептеңіздер.
9.4.2 (2) өрнектің дұрыстығын тексеріңіздер
9.4.3 9.2-кестеге жазылған өлшеулер нәтижесін пайдаланып:
а) стерженьдердегі жүкшелердің екі орны үшін уақыттардың <t1> және<t2> орташа мәндерін;
б) уақыттың <t1> және <t2> орташа мәндерін (8) және (10) формулаларға қойып, ε 1 және ε2 , I1 және I2 мәндерін;
в) ε 1/ε2 және I1/I2 қатынастарын есептеңіздер.
9.4.4 (3) өрнектің дұрыстығын тексеріңіздер.
9.5 Бақылау сұрақтары
9.5.1 Жіпке ілінген жүкке екінші жүкті қосса, маховиктің бұрыштық үдеуі өсе ме жоқ кеми ме?
9.5.2 Стерженьдердегі жүкшелер қалай орналасқанда маховиктің инерция моменті көп? Қай жағдайда аз болады?
9.5.3 Маховиктің бұрыштық үдеуі стерженьдердегі жүкшелердің орналасуына қалай тәуелді болады?
9.5.4 Стерженьдердегі жүктің орналасуына жіпке ілінген жүктің қозғалыс үдеуі байланысты бола ма?
9.5.5 Тәжірибе әдістемесінде есептеу формуласын қорыту барысында қандай факторлар ескерілмеді?
9.5.6 Берілген тәжірибедегі негізгі қателік көздері нелер?
10 ММФ - 9 зертханалық жұмысы. Гироскопиялық эффектті оқып үйрену
Жұмыстың мақсаты: қатты денелердің өз еркін осьтерін айнала болатын айналмалы қозғалыс динамика заңдарын гироскоптың еріксіз прецессиясы мысалы бойынша оқып үйрену.
Тапсырмалар:
- гироскоптың импульс моменті мәнін анықтау;
- гироскоптың бас инерция моменті мәнін анықтау.
10.1 Тәжірибенің әдістемесі
Гироскоп деген өзінің симметриялы осін тез айнала алатын аксиалды симметриялы ауыр қатты дене. Арнайы жасалған ілініс құрылғы арқасында гироскоптың осі кез келген жаққа еркін айнала алады. Гироскоптың тез айналуы арқылы түсіндірілетін барлық құбылыстар гироскопиялық эффект деп аталады. Олардың бірі өз осін өте жылдам айналған гироскоп осы айналу осі бағытын тұрақты сақтайды. Гироскоптың бұл қасиеті оны зымырандардың ұшуының негізгі құралы және өз бетінше ұшудың (автопилот) бас элементі етеді.
Гироскоп қозғалысының
ең қызық түрі – оның еріксіз прецессиясы.
Әдетте гироскоп масса центрі болып табылатын «О» нүктесіне
бекітіледі, сондықтан ол тек О осін ғана айналып қоймай,
сонымен бірге вертикаль және горизонталь ОУ және ОХ осьтерін де
айналады (10.1-сурет). Гироскоптың фигура осінің
қандай да болмасын бір нүктесіне тұрақты Ғ
күшін түсірейік, мысалы А нүктесіне массасы ![]() кішкене жүк
бекітейік. Бұл жағдайда
кішкене жүк
бекітейік. Бұл жағдайда ![]() . Гироскоп айналмаған
жағдайда, әдеттегідей жүктің әсерімен
гироскоптың осі ауытқиды. Егер гироскоптың маховигін
жылдам айналдырғанда, ауырлық күші әсер еткенде
гироскоптың фигурасы осі ОУ осін ақырын айнала бастайды.
Мұндай айналу еріксіз прецессия деп аталады. Гироскопқа
моменттер теңдеуін қолдануға болады.
. Гироскоп айналмаған
жағдайда, әдеттегідей жүктің әсерімен
гироскоптың осі ауытқиды. Егер гироскоптың маховигін
жылдам айналдырғанда, ауырлық күші әсер еткенде
гироскоптың фигурасы осі ОУ осін ақырын айнала бастайды.
Мұндай айналу еріксіз прецессия деп аталады. Гироскопқа
моменттер теңдеуін қолдануға болады.
![]() ,
(1)
,
(1)
мұндағы ![]() -
импульс моменті, ол гироскоптың бас осі бойымен
бағытталған ( 10.1-суретте OZ осі);
-
импульс моменті, ол гироскоптың бас осі бойымен
бағытталған ( 10.1-суретте OZ осі);
![]() – сыртқы күштердің "О" осіне қатысты моменті,
берілген жағдайда ол
– сыртқы күштердің "О" осіне қатысты моменті,
берілген жағдайда ол ![]() векторына перпендикуляр,
сондықтан ол импульс моментінің мәнін өзгертпейді, ол
оның бағытын өзгертеді. Сонымен гироскоптың осі
вертикаль осьті айналады. Мұнда пайда болатын прецессияның
векторына перпендикуляр,
сондықтан ол импульс моментінің мәнін өзгертпейді, ол
оның бағытын өзгертеді. Сонымен гироскоптың осі
вертикаль осьті айналады. Мұнда пайда болатын прецессияның ![]() бұрыштық жылдамдығы
түсірілген күштің М моменті мен гироскоптың
бұрыштық жылдамдығы
түсірілген күштің М моменті мен гироскоптың ![]() импульс
моментімен анықталады
импульс
моментімен анықталады
![]() (2)
(2)
немесе
![]() (2/)
(2/)
мұндағы ![]() - гироскоптың
фигурасына қатысты инерция моменті (бас инерция моменті ). Түсірілген
күштің моменті модуль бойынша
- гироскоптың
фигурасына қатысты инерция моменті (бас инерция моменті ). Түсірілген
күштің моменті модуль бойынша
![]() (3)
(3)
мұндағы ![]() нүктесіне
қатысты күш иіні.
нүктесіне
қатысты күш иіні.
ҒРМ – 10 құралының
гироскопы жүктің белгілі бір орны үшін жүйенің
масса центрі «О» нүктесімен дәл келеді де, гироскоп
тепе-теңдік күйде болады. Осы күйден жүкті ![]() аралыққа
жылжытқанда, прецессия пайда болады. Бұл жағдайда күш
моменті
аралыққа
жылжытқанда, прецессия пайда болады. Бұл жағдайда күш
моменті
![]() . (4)
. (4)
(2), (2') және (4) өрнектерінен қажетті есептеу формуласын аламыз
![]() (5)
(5)
![]() (6)
(6)
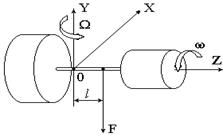
10.1 Сурет
Сонымен гироскоптың импульс моментін
анықтау үшін жүктің тепе-теңдік күйден r
қашықтыққа ығысқан кездегі оның
прецессиясының ![]() жиілігін
өлшеу керек. Тәжірибеден гироскоптың тез айналуының
ω жиілігін анықтап, (6) формуласы бойынша гироскоптың
жиілігін
өлшеу керек. Тәжірибеден гироскоптың тез айналуының
ω жиілігін анықтап, (6) формуласы бойынша гироскоптың ![]() бас инерция моментін
есептеуге болады.
бас инерция моментін
есептеуге болады.
10.2 Тәжірибе қондырғысы
FPM- 10 қондырғысындағы гироскоп корпус
бойымен жүк жылжи алатын рычаг бекітілген электродвигатель болып
табылады. Білігіне инертті дискі бекітілген двигательдің роторы,
қоректендіруші кернеу берілгенде меншікті осін айнала қозғалады.
Айналу жылдамдығы басқару және өлшеу блогының бет
жағына орналасқан потенциометрдің РЕГ. СКОРОСТИ
тұтқасы көмегімен реттеледі. Тілшелі құрал
ротордың бір минуттағы айналу n санын көрсетеді.
Құралдың бет жағында, сондай-ақ
ажыратып-қосқыштар СЕТЬ, СБРОС, СТОП түймешіктері және
сандық индикатор орналасқан, олар СБРОС және СТОП
түймешіктерін басу арасындағы ![]() уақыт аралығының
ұзақтығын (мс-пен) және прецессия
бұрышының
уақыт аралығының
ұзақтығын (мс-пен) және прецессия
бұрышының ![]() шамасын көрсетеді.
шамасын көрсетеді.
10.3 Тәжірибенің орындалу реті
10.3.1 Құралды түзетіп алып, ток көзіне қосу.
10.3.2 Рычагты бойлай жүкті жылжыта отырып, гироскоптың тепе-теңдік күйін табу (бұл күйде рычаг горизонталь орналасады).
10.3.3 РЕГ. СКОРОСТИ тұтқасымен электр двигателін токқа қосып, оның айналу жылдамдығын 5000-7000 айн/мин аралығында болатын етіп реттеу.
10.3.4 Жүкті тепе-теңдік күйден ![]() оңға
("+" таңбасы) немесе солға ("- " таңбасы) жылжытып, прецессия
құбылысын алу. СБРОС түймешігін басу керек.
оңға
("+" таңбасы) немесе солға ("- " таңбасы) жылжытып, прецессия
құбылысын алу. СБРОС түймешігін басу керек.
10.3.5 Гироскоп осінің бұрылу бұрышы 500 қа жеткенде СТОП түймешігін басып, құралдың көрсетуін 10.1-кестеге жазу.
10.1 К е с т е
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10.3.6 Электр двигателінің айналу жылдамдығын
өзгертпей, басқа ![]() үшін (4 және 5-б.)
үштен кем емес рет қайталау.
үшін (4 және 5-б.)
үштен кем емес рет қайталау.
10.4 Алынған мәліметтерді өңдеу
10.4.1 Айналудың ![]() бұрышын радианға айналдырып алып, прецессияның
бұрышын радианға айналдырып алып, прецессияның
![]() бұрыштық
жылдамдығын мына
бұрыштық
жылдамдығын мына
![]() (7)
(7)
формула бойынша есептеу.
10.4.2 Жиіліктің ![]() санын айналым/секундқа
айналдырып, жылдам айналудың бұрыштық жылдамдығын
мына формуламен есептеу
санын айналым/секундқа
айналдырып, жылдам айналудың бұрыштық жылдамдығын
мына формуламен есептеу
![]() (8)
(8)
10.4.3
Гироскоптың импульс моментін (5) формуламен
есептеу.
10.4.4 Дискілі ротордың инерция моментін (6) формуламен есептеу.
10.4.5 ![]() және
және ![]() орташа мәндерін есептеп,
олардың
орташа мәндерін есептеп,
олардың ![]() және
және
![]() кездейсоқ
қателіктерін
кездейсоқ
қателіктерін ![]() сенімділік
ықтималдылығы үшін бағалау.
сенімділік
ықтималдылығы үшін бағалау.
10.5 Бақылау сұрақтары
10.5.1 Гироскоптың қандай ерекше қасиеттері бар?
10.5.2 Гироскоптың еріксіз прецессиясы қандай жағдайларда орын алады?
10.5.3 Прецессияның ![]() бұрыштық жылдамдығы неге байланысты?
бұрыштық жылдамдығы неге байланысты?
10.5.4
Гироскоптың ![]() импульс
моментінің шамасы неге байланысты?
импульс
моментінің шамасы неге байланысты?
Әдебиеттер тізімі
1. Зайдель А.Л. Ошибки измерений физических величин. - Л.: Наука, 1974.
2. Кассандрова О.Н., Лебедев В.В. Обработка результатов наблюдений. -М.: Наука, 1970.
3. Савельев И.В. Жалпы физика курсы. 1-т. Алматы, Мектеп, 1976.
4. Детлаф А.А., Яворский Б.М. Курс физики. - М.: Высш. шк., 2002.
5. Трофимова Т.И. Курс физики. - М. : Высш. шк., 2002.
6. Иродов И.Е. Основные законы механики. - М.: Физматлит., 2000.
Мазмұны
Кіріспе 3
1 Өлшеулердің нәтижелерін статистикалық өңдеу 4
2 ММФ - 1 зертханалық жұмысы. Өлшеу практикумы 9
3 ММФ - 2 зертханалық жұмысы. Кинематика және динамика заңдарын
Атвуд машинасы арқылы оқып үйрену 12
4 ММФ – 3 зертханалық жұмысы. Көлбеу маятник тәсілімен
домалау үйкелісі коэффициентін анықтау 16
5 ММФ – 4 зертханалық жұмысы. Соқтығысу кезінде импульстің
және энергияның сақталу заңын оқып үйрену 19
6 ММФ – 5 зертханалық жұмысы. Максвелл маятнигінің инерция
моментін анықтау 22
7 ММФ – 6 зертханалық жұмысы. Бұралу тербелістері көмегімен катты
денелердің инерция моментін анықтау 24
8 ММФ - 7 зертханалық жұмысы. Баллистикалық бұралмалы маятник
арқылы снарядтың ұшу жылдамдығын анықтау 27
9 ММФ – 8 зертханалық жұмысы. Обербек маятнигі арқылы айналмалы
қозғалыс динамикасын оқып үйрену 30
10 ММФ - 9 зертханалық жұмысы . Гироскопиялық эффектті оқып үйрену 34
Әдебиеттер тізімі 38