Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра инженерной кибернетики
МОДЕЛИРОВАНИЕ И ИДЕНТИФИКАЦИЯ ОБЪЕКТОВ УПРАВЛЕНИЯ
Методические указания к курсовой работе
для студентов специальности 5В070200 – Автоматизация и управление
Алматы 2012
СОСТАВИТЕЛЬ: Ибраева Л.К. Моделирование и идентификация объектов управления. Методические указания к выполнению курсовой работы для студентов всех форм обучения специальности 5В070200 – Автоматизация и управление. – Алматы: АУЭС, 2012 -18 с.
Методические указания предназначены для выполнения курсовой работы по дисциплине «Моделирование и идентификация объектов управления». В курсовой работе исследуется задача динамики каскада резервуаров.
Цель работы: привитие навыков получения физико-математической модели объекта управления, анализа динамических характеристик объекта, навыков моделирования объекта управления на ЭВМ.
Математическая модель объекта в виде системы дифференциальных уравнений выводится на основе аналитических методов моделирования. Для имитационного моделирования поведения рассматриваемой системы и моделирования управления объектом применяются пакет моделирования динамических систем Simuink и пакет проектирования событийно-управляемых систем Stateflow системы MatLab.
Рецензент: канд. техн. наук, доцент Ни А.Г.
Печатается по плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2012 г.
© НАО «Алматинский университет энергетики и связи», 2012 г.
Введение
По учебному плану специальности 5В070200 – Автоматизация и управления» по дисциплине «Моделирование и идентификация объектов управления» предусмотрено выполнение курсовой работы. В результате выполнения курсовой работы студенты получают навыки разработки математической модели объекта управления на основе аналитических методов моделирования, анализа динамических характеристик объекта, навыков моделирования объекта управления на компьютере.
В курсовой работе исследуется задача динамики каскада резервуаров. Математическая модель объекта в виде системы дифференциальных уравнений выводится на основе аналитических методов моделирования.
Цель работы: привитие навыков получения физико-математической модели объекта управления, анализа динамических характеристик объекта, навыков моделирования объекта управления на ЭВМ.
Для имитационного моделирования поведения рассматриваемой системы и моделирования управления объектом применяются пакет моделирования динамических систем Simuink и пакет проектирования событийно-управляемых систем Stateflow системы MatLab.
Пакет моделирования динамических систем Simulink предназначен для математического моделирования линейных и нелинейных динамических систем и устройств, представленных своей функциональной блок-схемой, именуемой моделью. Для построения функциональной блок-схемы моделируемых устройств Simulink имеет обширную библиотеку блочных компонентов и удобный редактор блок-схем. Редактор блок-схем основан на использовании графического интерфейса пользователя и, по существу, является средством визуального программирования. Используя палитры компонентов (наборы) блок-схем, пользователь с помощью мыши переносит нужные компоненты на рабочий стол пакета и соединяет линиями входы и выходы блоков. В результате создается блок-схема модели.
Simulink автоматизирует следующий наиболее трудоемкий этап моделирования: он составляет и решает сложные системы алгебраических и дифференциальных уравнений, описывающих заданную функциональную схему (модель), обеспечивая удобный и наглядный визуальный контроль за поведением созданного пользователем виртуального устройства. Ценность Simulink заключается и в обширной библиотеке компонентов (источники сигналов с любыми временными зависимостями, преобразователи с разнообразными формами передаточных характеристик, интегрирующие и дифференцирующие блоки и т.д.). Также в библиотеке имеется набор регистрирующих устройств.
Важное достоинство пакета - возможность задания в блоках произвольных математических выражений. Как программное средство Simulink является типичным представителем визуально-ориентированного языка программирования. На всех этапах работы пользователь не имеет дела с обычным программированием. Программа автоматически генерируется в процессе ввода выбранных блоков компонентов, их соединений и задания параметров компонентов.
Самым значительным дополнением к среде Simulink является пакет проектирования событийно-управляемых систем Stateflow, который представляет собой графический инструментарий для проектирования сложных систем управления. Он дает возможность моделировать поведение сложных событийно-управляемых систем.
Для создания Statefiow-диаграммы необходимо сначала создать модель в Simulink или открыть уже существующую. Затем нужно выбрать в библиотеке блок, обозначающий диаграмму Statefiow, и перенести его в свою модель. После двойного щелчка по нему мышью, откроется окно Statefiow (chart), в котором, пользуясь меню и панелью инструментов, можно описывать сами состояния, связи между ними, определять переменные, условия переключения и другие, необходимые для управления элементы.
1 Задание на курсовую работу
1.1 Ознакомиться с объектом исследования. Обосновать вывод уравнений математической модели объекта.
1.2 Определить перечень входных и выходных переменных математической модели. Разработать подробный алгоритм работы объекта.
1.3 Для исследования поведения рассматриваемой динамической системы использовать пакет Simulink системы MatLab. Собрать блок-диаграмму модели в пакете Simulink в соответствии с логикой работы системы.
1.4 Используя графический инструментарий для проектирования систем управления Statefiow, провести моделирование управления объектом.
1.5 Провести имитационные эксперименты (по варианту) для исследования поведения рассматриваемой системы. Вариант исследования получить у преподавателя.
1.6 Оформить отчет по работе. Отчет включает:
- постановку задачи курсовой работы;
- уравнения модели с обоснованием их вывода;
- перечень входных и выходных переменных модели;
- подробные блок-диаграммы каждого блока модели в пакете Simulink, с комментариями и поясняющими надписями;
- блок-диаграмму контроллера;
- результаты и анализ проведенных экспериментов.
2 Описание объекта исследования
Исследуемая система представляет собой два цилиндрических бака, расположенных вертикально на разной высоте таким образом, что дно первого бака находится на расстоянии H метров от дна второго (см.рисунок 1). Баки имеют одинаковую высоту h метров и различные диаметры: первый – D1 см, второй – D2 см. Система имеет входную трубу, находящуюся в первом баке на расстоянии h от его дна. Баки соединены трубой, являющейся выходной трубой первого бака (и расположенной у самого его дна) и входной трубой второго бака (расположенной на расстоянии Н от его дна). Также система имеет выходную трубу, расположенную у самого дна второго бака.
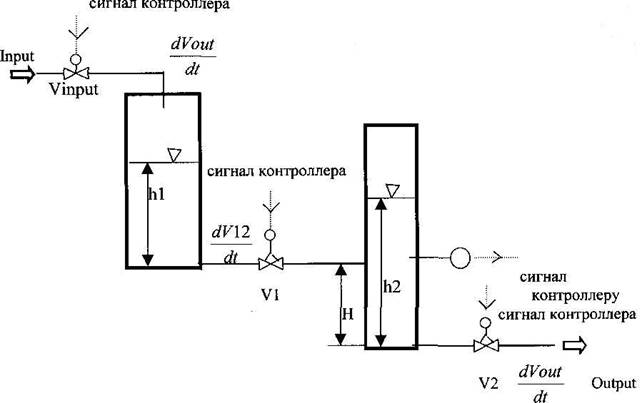
Рисунок 1 - Система двух баков
Входная труба системы снабжена входным краном Vinput, который открывается мгновенно, и скорость входного потока воды определяется как (л/ч)
 (1)
(1)
Краны V1 и V2 являются медленными устройствами, они открываются и закрываются с одной и той же постоянной скоростью, так что от момента начала открытия (закрытия) до полного открытия (закрытия) требуется 80 с. Их открытие и закрытие контролируется задвижкой, меняющей свое положение от значения Р=0 (полное закрытие в условных единицах) до Р=80 (полное открытие).
Управление открытием/закрытием кранов Vinput, V1 и V2 осуществляется специальным контроллером.
Если через А1 и А2 обозначить площади оснований баков, то система уравнений для уровней воды в баках h1 и h2 запишется так
 (2)
(2)
где ![]() - скорость протекания воды по трубе между
баками,
- скорость протекания воды по трубе между
баками,
![]() - скорость вытекания воды из системы.
- скорость вытекания воды из системы.
Скорость протекания воды между баками зависит от уровней воды h1 и h2, значения Н и положения задержки Р1 в кране V1
 (3)
(3)
![]() Скорость
вытекания воды из системы зависит от уровня воды во втором баке h2 и положения задвижки Р2
на кране V2
Скорость
вытекания воды из системы зависит от уровня воды во втором баке h2 и положения задвижки Р2
на кране V2![]()
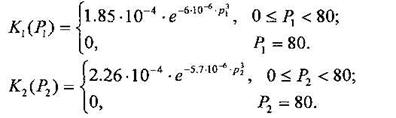
![]() Индивидуальные свойства кранов определяются
функциями
Индивидуальные свойства кранов определяются
функциями
![]()
3 Алгоритм работы системы
Работа всей системы описывается следующим алгоритмом. В исходном состоянии все краны закрыты и оба бака пусты. В начальный момент контроллер посылает сигнал входному крану Vinput, тот мгновенно открывается и в течение времени Time1 [с] наполняется только первый бак.
По истечении времени Time1 контроллер посылает команду открыть кран V1, и вода начинает поступать во второй бак. Второе состояние сохраняется на протяжении Time2 [с].
По истечении времени Time2 начинает контролироваться положение крана V2. А именно, если контроллер обнаруживает, что уровень воды во втором баке опустился ниже значения L_min [м], поступает команда закрыть выходной кран, если вода во втором баке превышает уровень L_plus [м] - выдается команда открыть выходной кран.
Аварийными считаются ситуации, когда переполняется один из баков или происходит периодическое открытие и закрытие выходного крана.
Нормальным режимом системы считается состояние, когда все краны открыты, и вода протекает через систему с постоянной скоростью.
Сигналы о значениях Vinput, V1, V2 подаются от контроллера. Эти переменные являются входами модели.
Таким образом, предварительную схему модели можно представить в следующем виде (см.рисунок 2). Назовем эту подсистему Tank_System_Block.
 |
Рисунок 2 - Подсистема определения уровней воды Tank_System_Block
Отметим, что в дальнейшем все блоки модели оформляются как подсистемы.
Основными уравнениями модели является система (2) - система двух дифференциальных уравнений первого порядка для определения выходных переменных модели – h1 и h2.
Для преобразования этих уравнений в блок-диаграмму используется следующая идея. Вначале формируются правые части уравнений. Проинтегрировав эти выражения, получаем значения h1 и h2. Полученные величины теперь можно использовать для формирования правых частей уравнений (обратной связью).
Итак, для решения системы (2) необходимо определить правые части уравнений. Проанализируем составные элементы правых частей этих уравнений.
Выражение  в правой части первого уравнения системы
(2) рассчитывается по одной из формул (1) в зависимости от значения сигнала
контроллера Vinput.
в правой части первого уравнения системы
(2) рассчитывается по одной из формул (1) в зависимости от значения сигнала
контроллера Vinput.
Чтобы рассчитать ![]() по формулам (3) - два варианта
выражений для двух возможных ситуаций, а также
по формулам (3) - два варианта
выражений для двух возможных ситуаций, а также ![]() по формуле (4) необходимо вначале вычислить
функции K1(P1) и K2(P2). Эти функции рассчитываются по формулам (5) в
зависимости от величины, поступающей на вход подсистемы от контроллера.
по формуле (4) необходимо вначале вычислить
функции K1(P1) и K2(P2). Эти функции рассчитываются по формулам (5) в
зависимости от величины, поступающей на вход подсистемы от контроллера.
В выражениях (3) и (4) помимо функций K1(P1) и K2(P2) используются текущие значения h1 и h2. То есть, полученные после интегрирования дифференциальных уравнений значения уровней в баках необходимо подать на вход подсистемы расчета правых частей этих уравнений.
4 Создание блок-диаграммы модели
4.1 Общий вид диаграммы
Блок–диаграмма модели собирается в пакете Simulink системы MatLab.
Окончательный вид диаграммы модели в пакете Simulink имеет вид, представленный на рисунке 3.
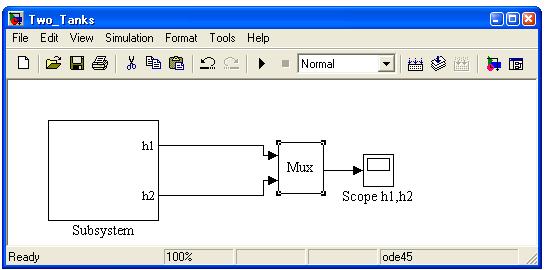
Рисунок 3 - Окончательный вид диаграммы модели
Блок System не имеет входов, но имеет два выхода – h1 и h2, соединенные со стандартным блоком Мuх, объединяющим их в вектор (h1, h2). Последний связан со стандартным блоком вывода Scope, на который он подает вектор выходных величин (h1, h2).
4.2 Диаграмма подсистемы System
Чтобы построить диаграмму модели, необходимо выделить в системе отдельные относительно независимые элементы и определить, каким образом они взаимосвязаны между собой.
В рассматриваемой задаче, в первую очередь, можно выделить два основных элемента: саму систему из двух баков и устройство, управляющее открытием/закрытием кранов (контроллер).
Контроллер посылает системе из двух баков сигналы, управляющие поведением кранов Vinput, V1, V2. Для правильного управления системой баков ему необходимо иметь значения интервалов времени Time1, Time2, уровней L_plus и L_min, а также получать от системы баков значение уровня воды во втором баке h2, необходимое для управления поведением выходного крана V2.
Основная подсистема модели (назовем ее System) представляет собой составной блок (см. рисунок 4). Он содержит в себе функциональную схему, включающую диаграмму Stateflow (представленную блоком Controller, являющимся экземпляром стандартного блока Chart и описывающим поведение контроллера), и составной блок Tank_System_Block - подсистему определения уровней воды в баке, которые соединены соответствующими функциональными связями.
Также в блоке System присутствуют часы Clock, подающие системное время из Simulink в диаграмму Stateflow. Это объясняется тем, что при построении моделей, в которых используются блоки Stateflow (содержащие в себе переходы, инициируемые истечением неких временных интервалов), необходимо синхронизировать внутреннее системное время в Stateflow и в Simulink. Для этого необходимо на отдельный вход в блоке Stateflow подавать системное время из Simulink, и именно это время использовать при составлении условий переходов (таких, как истечение отрезков времени Time1 и Time2 в задаче о двух баках).
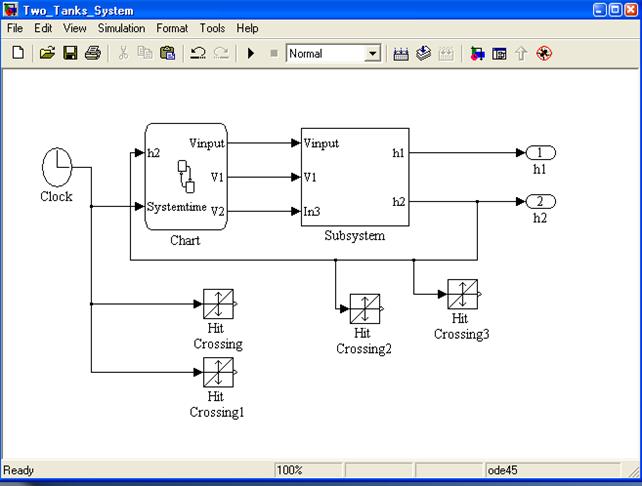
Рисунок 4 - Диаграмма подсистемы System
К связи, соединяющей блоки Clock и Controller, подсоединяются два экземпляра блока Hit Crossing. Еще два экземпляра блока Hit Crossing подсоедините к связи блока Controller и выхода h2 блока Tank_System_Block.
Использование блоков Hit Crossing необходимо для правильного выполнения переходов в диаграмме Stateflow, включенной в модель Simulink, в которой происходит непрерывное интегрирование. На вход блока Hit Crossing подается некая величина (в модели двух баков для двух блоков Hit Crossing это системное время, для еще двух - величина h2). Сам блок Hit Crossing содержит в себе некую величину, при совпадении которой с входной величиной система уменьшает шаг интегрирования. В связи со спецификой системы Stateflow это влияет на правильное выполнение переходов и не позволяет системе «проскочить момент», когда должен выполниться тот или иной переход. У первого блока Hit Crossing внутренней величиной является момент времени Time1, у второго – Time1 + Time2, у третьего - значение L_plus, у четвертого – L_minus.
4.3 Составные блоки подсистемы Tank_System_Block
Составной блок Tank_System_Block содержит следующие элементы, соединенные соответствующими функциональными связями:
- составной блок Tank_System (имеет три входа, соединенные с соответствующими выходами блока Chart, и два выхода – h1 и h2);
- блоки проверки переполнения баков (реализуются экземплярами стандартных блоков Const, Relational Operator и Stop Simulation).
Система двух баков Tank_System должна реагировать на сигналы контроллера, а именно: управлять открытием/закрытием кранов, а также отслеживать ситуацию, когда вода во втором баке поднимается выше уровня Н, и при возникновении такой ситуации изменять скорость поступления воды во второй бак в соответствии с формулой (3). Также система должна отслеживать ситуацию переполнения баков и должным образом на нее реагировать.
Исходя из этих требований, можно провести декомпозицию системы на несколько частей, а именно:
- выделить элемент, отвечающий за открытие/закрытие крана Vinput; назовем эту подсистему Vin_Control;
- выделить элементы, управляющие открытием/закрытием задвижек Р1 и Р2 по формулам (5); это будут подсистемы K1_Control и K2_Control;
- в качестве еще одного элемента системы можно выделить подсистему (назовем ее Two_Tanks), на которую возлагается задача отслеживания аварийной ситуации переполнения баков и ситуации, когда вода во втором баке поднимается выше уровня Н.
4.3.1 Блок управления входным краном.
Составной блок Vin_Control содержит в себе функциональную схему, состоящую из стандартного блока Switch и двух экземпляров стандартного блока Const, содержащих в себе значения, соответствующие скорости входного потока воды в систему двух баков, когда входной кран открыт и закрыт. Переключение между этими значениями происходит в блоке Switch в зависимости от значения, поступающего на вход блока Vin_Control от контроллера. Соответствующее значение Vin подается на выход.
Блок Vin_Control имеет один вход и один выход.
4.3.2 Блок управления краном между баками,
Составные блоки K1_Control и K2_Control имеют идентичные функциональные схемы, различающиеся только значением коэффициентов в уравнении, представленном в стандартном блоке Fcn (формулы (5)). Функциональная схема каждого из них состоит из следующих элементов:
- двух экземпляров стандартного блока Switch, первый из которых необходим для переключения между положениями кранов V1/V2 открыто/закрыто, а второй - для отслеживании ситуации, когда параметр Р становится равным 80, и соответствующего переключения между значениями функции К(Р);
- двух экземпляров стандартного блока Const, содержащих в себе значения 1 и -1, соответствующие положению крана V1/V2 (открывается/ закрывается), и один блок Const, содержащий значение 0 для функции К(Р) в ситуации, когда Р>=80;
- стандартного блока Integrator, интегрирующего поступающее от первого переключателя значение (1 или -1) в пределах от 0 до 80 с начальным значением интегрируемой величины 80 (значение с этого блока поступает на второй переключатель);
- стандартного блока Fсn, в котором происходит вычисление значения функции К1(Р)/К2(Р).
Переключения
в блоке Switch происходят в зависимости от
величины V1/V2,
поступающей на вход
блока K1_Control/K2_ControI от контроллера.
Соответствующее значение функций kl/k2 подается на выход. Блоки K1_Control/ K2_Control имеют один вход и один выход.
4.3.3 Подсистема Two_Tanks.
Подсистема Two_Tanks имеет входные переменные kl, k2 и Vin, представляющие соответственно значения функций, управляющих кранами V1 и V2, а также скорость входного потока воды в систему. Эти переменные поступают в рассматриваемую подсистему с выходов блоков, в которых они рассчитывались.
Выходные переменные - уровни воды в первом и втором баках h1 и h2. Значения этих переменных рассчитываются по формулам (2). Правые части этих уравнений содержат величины Vout и V12, закон изменения которых задается формулами (3) и (4). Следовательно, вначале надо сформировать подсистемы для вычисления этих переменных, назовем их Vout_calc, V12_calcl и V12_calc2 (два блока, так как формула (3) имеет две ветви).
На вход блока Vout_calc поступают значения k2 и h2. Для объединения этих значений в один вектор используется стандартный блок Мuх. С этого блока вектор поступает на вход стандартного блока Fсn, в котором происходит вычисление выходной величины Vout (формула (4)).
Аналогично создаются два блока для вычисления выходной величины V12 (формула (3)). Составной блок V12_calcl имеет функциональную схему, состоящую из стандартного блока Мuх, который объединяет в один вектор значения kl и h1, поступающие на его входы, и подающего этот вектор на вход стандартного блока Fсn, в котором происходит вычисление выходной величины V12. Блок V12_calc1 имеет два входа и один выход.
Составной блок V12_calc2 имеет функциональную схему, состоящую из стандартного блока Мuх, объединяющего в один вектор значения kl, hl и h2, которые поступают на его вход, и подающего этот вектор на вход стандартного блока Fcn, в котором происходит вычисление выходной величины V12. Блок V12_calc2 имеет три входа и один выход.
Составной блок Two_Tanks имеет функциональную схему, образованную из следующих элементов:
- составных блоков Vout_calc, V12_calcl и V12_calc2;
- стандартного блока Switch;
- двух экземпляров стандартного блока Мих, объединяющих в векторы
соответствующие значения - Vin (поступающее на вход блока Two_Tanks с выхода блока Vin_Control) и V12, а так же V12 и Vout;
- блоков Fcn, в которых вычисляются правые части уравнений (формулы (2));
- двух экземпляров стандартного блока Integrator, выходами которых являются значения h1 и h2, поступающие на выход.
Переключение в блоке Switch происходит в зависимости от значения h2, поступающего на вход блока Switch от интегратора. При этом подключается один из блоков, вычисляющих V12.
4.3.4 Окончательная диаграмма объекта исследования.
Блоки Two Tanks, Vin Control, K1_Control и K2_ControI, соединенные между собой функциональными связями, составляют подсистему Tank_ System. Блок Tank System имеет три входа, на которые подаются сигналы контроллера (Vinput, V1, V2), и два выхода – h1 и h2.
Cоставной блок Tank_System, и по два экземпляра стандартных блоков Const, Relational Operator и Stop Simulation (выполняющих проверку на переполнение баков), соединенные соответствующими функциональными связями, образуют подсистему Tank_System_Block.
Блок Tank_System_Block имеет три входа (на которые подаются сигналы от контроллера) и два выхода (h1 и h2). Эта подсистема является блок-диаграммой нашего объекта исследования.
5 Управление поведением объекта
5.1 Подсистема Statefiow пакета Simulink
Моделирование систем, поведение которых зависит от внешних событий (ситуаций) называется событийным или ситуационным. В пакете Simulink системы MatLab такое моделирование реализуется с помощью специального расширения Stateflow. Процесс создания модели системы управления в Statefiow обычно подразумевает следующие этапы:
- создание новой модели управляемого объекта в Simulink или использование уже существующей модели;
- создание диаграммы в Statefiow;
- добавление к Statefiow-блоку интерфейса событий и данных;
- откладка модели;
- генерация кода.
Пакет Statefiow имеет свой графический интерфейс пользователя, позволяющий создавать графические диаграммы, называемые SF-диаграммами. Эти диаграммы служат для визуального представления работы моделируемой системы. Это достигается анализом всех стадий ее работы с указанием активных и пассивных в данное время блоков и переходов между ними по результатам анализа тех или иных условий. Доступ к средствам Stateflow подобен доступу к разделам библиотеки пакета Simulink. В окне библиотеки пакета Stateflow присутствует единственный блок Chart, который размещается в окне модели с помощью мыши. В этом блоке, пользуясь меню и панелью инструментов можно описывать состояния, связи между ними, определять переменные, условия переключения и другие. необходимые для управления элементы.
В основе Statefiow лежит специальная форма представления - диаграмма состояний системы. Основные элементы диаграммы состояний – это состояние (state) и переход (transition).
Каждое состояние описывает один режим работы событийно-управляемой системы. Состояние становится активным, если получает значение “истина” условие перехода (срабатывает переход), ведущего к нему, или, если это состояние является начальным. Каждое состояние на диаграмме Statefiow имеет «родителя», которым, по умолчанию, является сама диаграмма Statefiow. Для создания графического образа состояния необходимо, выбрав на панели соответствующую кнопку, щелкнуть кнопкой мыши в том месте, где его необходимо разместить. Состояние имеет текстовые метки, которые определяют действия, выполняемые во время его активности. Имя состояния вводится первым.
Переход – это объект, связывающий между собой два состояния. На диаграмме Stateflow он представляется стрелкой, начало которой относится к состоянию-источнику, а конец – к состоянию-адресату. Для того чтобы нарисовать переход, достаточно установив мышь у состояния-источника, нажать ее левую кнопку и, удерживая ее, протянуть появившуюся стрелку до состояния-адресата. Переход имеет метку, которая описывает условия срабатывания перехода и выполняемые при этом действия. Текст метки имеет следующий формат:
Event [condition] {condition_action}/transition_action,
где
- Event – определяет события, которые инициирует переход. Если событие не указано, то переход инициируется при выполнении булевского выражения. Если событий, инициирующих данный переход, несколько, то они все указываются, при этом разделяются оператором OR;
сondition – булевское выражение, инициирующее переход, становясь истинным;
condition_action – действие, выполняемое после того, как стало истинным условие перехода, но до того, как весь переход определился истинным (и определилось состояние-адресат);
transition_action – определяет действия, совершаемые при переходе, если все описанные ранее условия истинны и уже определено состояние-адресат.
Для хранения числовых данных используются переменные – неграфические объекты на диаграмме Stateflow. Переменные можно использовать на любом уровне иерархии. Различают следующие виды переменных: Входные; Выходные; Локальные; Константы; Существующие только в течение определенного временного интервала; Определенные в рабочем пространстве Matlab; Импортируемые из источника, внешнего относительно диаграмме Stateflow и Simulink; Экспортируемые адресату, внешнему относительно диаграмм Stateflow и Simulink.
Неграфические объекты на диаграмме Stateflow, управляющие диаграммой, являются событиями. Все события имеющие отношение к диаграмме Stateflow, должны быть определены. Различают следующие виды событий: Входные; Выходные; Локальные; Импортируемые из источника, внешнего относительно диаграмм Stateflow и Simulink; Экспортируемые адресату, внешнему относительно диаграмм Stateflow и Simulink.
Для того чтобы создать входные (выходные и т. д.) переменные в блоке Stateflow, необходимо в окне соответствующей диаграммы Stateflow выбрать соответствующий пункт меню: Add/ Event /Input from Simulink для создания входной, Add/ Event /Output to Simulink для создания выходной и Add/Data/Local для создания локальной переменной, и в открывшемся диалоговом окне Event ввести имя переменной и другие ее характеристики.
5.2 Создание диаграммы контроллера
Диаграмма отражает логику поведения блока Contoller. Процесс из начальной точки мгновенно переходит в состояние state1, входным действием которого является посылка сигнала, открывающего входной кран Vinput. По истечении времени Time1 происходит переход в состояние state2, входным действием которого является посылка сигнала, открывающего кран между баками. По истечении времени Time2 происходит переход в состояние state3, входным действием которого является посылка сигнала, открывающего выходной кран V2. В данном состоянии система находится до тех пор, пока не станет истинным условие перехода h2 < L_min, говорящее о том, что уровень воды во втором баке стал ниже уровня L_min. Если условие выполняется, то система переходит в состояние state4, входным действием которого является посылка сигнала, отключающего кран V2. Система находится в этом состоянии до тех пор, пока не выполняется условие перехода h2 > L_plus, говорящее о том, что уровень воды во втором баке стал выше уровня L_plus. Тогда система переходит обратно в состояние state3.
6 Проведение имитационных экспериментов на модели
6.1 Требуется подобрать параметры модели Timel, Time2, L_plus и L_min таким образом, чтобы смоделировать следующие ситуации в работе системы:
а) режим нормальной работы системы;
б) переполнение первого бака;
в) переполнение второго бака;
г) периодическое открытие и закрытие выходного крана. Для этого случая необходимо отметить время первого и десятого переключения, а также значения уровня h2 в эти моменты.
6.2 По результатам экспериментов заполнить следующую таблицу:
|
Ситуация |
Timel [с] |
Time2 [с] |
L_plus [м] |
L_min |м] |
|
а |
|
|
|
|
|
б |
|
|
|
|
|
в |
|
|
|
|
|
г |
|
|
|
|
7 Варианты заданий
|
№ варианта |
h |
H |
D1 |
D2 |
Vinput |
|
1 |
0,7 |
0,27 |
8,4 |
3,5 |
280 |
|
2 |
0,5 |
0,2 |
6 |
2,5 |
200 |
|
3 |
0,625 |
0,25 |
7,5 |
3,125 |
250 |
|
4 |
0,8 |
0,48 |
9,6 |
4 |
320 |
|
5 |
0,875 |
0,34 |
10,5 |
4,375 |
350 |
|
6 |
0,75 |
0,29 |
9 |
3,75 |
300 |
|
№ варианта |
h |
H |
D1 |
D2 |
Vinput |
|
7 |
1,25 |
0,48 |
15 |
6,25 |
500 |
|
8 |
1,125 |
0,44 |
1,5 |
5,625 |
450 |
|
9 |
1,5 |
0,58 |
18 |
7,5 |
600 |
|
10 |
1,375 |
0,54 |
16,5 |
6,875 |
550 |
|
11 |
1,1 |
0,585 |
13,2 |
5,5 |
440 |
|
12 |
1,2 |
0,42 |
14,4 |
6 |
480 |
|
13 |
0,6 |
0,27 |
8,0 |
4,5 |
270 |
|
14 |
0,5 |
0,3 |
5,6 |
2,8 |
200 |
|
15 |
0,65 |
0,35 |
7,0 |
3,5 |
250 |
|
16 |
0,8 |
0,5 |
9,5 |
4,2 |
300 |
|
17 |
0,85 |
0,35 |
10,0 |
4,75 |
320 |
|
18 |
0,75 |
0,25 |
9.5 |
3,5 |
310 |
|
19 |
1, 5 |
0,5 |
10 |
6,5 |
400 |
|
20 |
1,15 |
0,45 |
8.0 |
5,5 |
250 |
|
21 |
1,5 |
0,5 |
15 |
7,0 |
200 |
|
22 |
1,35 |
0,5 |
14,5 |
6,75 |
50 |
|
23 |
1,3 |
0,55 |
12,2 |
5,8 |
420 |
|
24 |
1,4 |
0,4 |
14,0 |
6,2 |
430 |
|
25 |
1,2 |
0,3 |
7.0 |
5,0 |
230 |
|
26 |
1,8 |
0,5 |
17 |
6,0 |
210 |
|
27 |
1,25 |
0,7 |
14,0 |
6,5 |
70 |
|
28 |
1,35 |
0,50 |
12,0 |
5,9 |
400 |
|
29 |
1,5 |
0,6 |
14,6 |
6,3 |
470 |
|
30 |
0,75 |
0,4 |
9,0 |
5,0 |
315 |
8 Контрольные вопросы
8.1 В чем отличие аналитических методов моделирования от экспериментальных?
8.2 Какие законы сохранения используются для вывода уравнений модели?
8.3 Как по виду модели определить, является ли она динамической?
8.4 Для решения каких задач удобно применять пакет Simulink?
8.5 Какой инструментарий системы MatLab используется для моделирования управления объектом?
8.6 Какие средства Simulink используются для визуализации результатов экспериментов, в чем их отличие?
8.7 Какие блоки Stateflow используются для выполнения переходов?
8.8 Объясните функцию блоков Mux, Switch, Fcn.
8.9 Перечислите основные разделы библиотеки блоков Simulink.
8.10 Какие компоненты библиотеки использованы при построении блок-диаграммы модели?
Список литературы
1. Ибраева Л.К., Хисаров Б.Д. Моделирование и идентификация объектов управления. Учебное пособие. – Алматы: АИЭС, 2009.
2. Кроу К. и др. Математическое моделирование химических производств. – М.: Мир, 1973.
3 MATLAB 6.5 SP1/7.06 Simulink 5/6 в математике и моделировании. – М.: СОЛОН-Пресс6 2005.
4. Дьяконов В. П. MatLab 6/6.1/6.5 + Simulink 4/5. Основы применения. –М.: Солон-ПРЕСС, 2004.
Содержание
|
|
С |
|
Введение |
3 |
|
1 Задание на курсовую работу |
4 |
|
2 Описание объекта исследования |
5 |
|
3 Алгоритм работы системы |
6 |
|
4 Создание блок-диаграммы модели |
8 |
|
4.1 Общий вид диаграммы |
8 |
|
4.2 Диаграмма подсистемы System |
8 |
|
4.3 Составные блоки подсистемы Tank_System_Block |
10 |
|
4.3.1 Блок управления входным краном |
10 |
|
4.3.2 Блок управления краном между баками |
10 |
|
4.3.3 Подсистема Two_Tanks |
11 |
|
4.3.4 Окончательная диаграмма модели объекта исследования |
12 |
|
5 Управление поведением объекта |
12 |
|
5.1 Подсистема Stateflow пакета Simulink |
12 |
|
5.2 Создание диаграммы контроллера |
14 |
|
6 Проведение имитационных экспериментов на модели |
15 |
|
7 Варианты заданий |
15 |
|
8 Контрольные вопросы |
16 |
|
Список литературы |
17 |
Св.план 2012 г., поз.98