Коммерциялық емес акционерлік қоғам
АЛМАТЫ ЭНЕРГЕТИКА Ж ӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ
Инженерлік кибернетика
кафедрасы
БАСҚАРУ ОБЪЕКТТЕРДІ МОДЕЛДЕУ ЖӘНЕ
ИДЕНТИФИКАЦИЯЛАУ
5В070200 – Автоматтандыру және басқару
мамандығының студенттері үшін
зертханалық жұмыстарды орындау бойынша
әдістемелік нұсқаулықтар
Алматы 2014
ҚҰРАСТЫРУШЫ: Л.К.Ибраева. Басқару объекттерді моделдеу және идентификациялау. 5В070200 – Автоматтандыру және басқару мамандығының студенттері үшін зертханалық жұмыстарды орындау бойынша әдістемелік нұсқаулықтар Алматы: АЭжБУ, 2014.- 39 б.
Әдістемелік нұсқаулар «Басқару объекттерді моделдеу және идентификациялау» пәні бойынша зертханалық жұмыстарды орындауға негізделген және де басқару объекттерді моделдеуге екі амалды қарастырады: аналитикалық және тәжірибелік (идентификациялау әдістерін). Әдістемелік нұсқаулар 7 зертханалық жұмыстарды сипаттайды және оларды орындағанда MatLab жүйесінің әртүрлі құралдарымен бірге «Инженерлік кибернетика» кафедрасында жасалған тәжірибелер нәтижелерін өңдеуінің бағдарламасын қолдануды ұсынады .
Бейне - 4, кесте - 3, әдебиет тізімі - 7 атау.
Пікір беруші: аға оқытушы К.Б.Альмуратова
«Алматы энергетика және байланыс университеті» коммерциялық емес акционерлік қоғамының 2014 ж. баспа жоспары бойынша басып шығарылады.
© «Алматы энергетика және байланыс университеті» КЕАҚ, 2014 ж.
Мазмұны
|
Кіріспе |
4 |
|
1 Зертханалық жұмыс №1. Жинақталған параметрлері бар объектті аналитикалық әдісімен моделдеу |
5 |
|
2 Зертханаық жұмыс №2. Резервуардағы процестің статикалық және динамикалық сипаттамаларын зерттеу |
10 |
|
3 Зертханалық жұмыс №3. Бірінші ретті сызықты объектті идентификациялаудың тура әдістері |
16 |
|
4 Зертханалық жұмыс №4. Сызықты объектті жиілік сипаттама көмегімен идентификациялау |
19 |
|
5 Зертханалық жұмыс №5. Сызықты динамикалық объекттерді параметрлік идентификациялау |
23 |
|
6 Зертханалық жұмыс №6. Сызықты объекттерді System Identification Toolbox пакеттің құралдарымен идентификациялау |
29 |
|
7 Зертханалық жұмыс №7. Динамикалық объекттерді параметрлі емес идентификациялау |
34 |
|
Әдебиет тізімі |
38 |
Кіріспе
Математикалық моделдерді құрудың екі принципиалды әртүрлі амалдары бар. Бірінші амал негізгі физикалық: масса, энергия және қозғалыс мөлшерлерін сақтау заңдылықтарын қолдануда негізделген моделдердің дифференциалдық теңдеулерін құрастыру жолымен орындалады. Осындай амал аналиткалық деп, ал жасалған моделдер - аналитикалық моделдер деп аталады. Екінші амал «қара жәшік» концепциясында негізделген, яғни объект туралы ақпарат оны пассивті немесе активті тәжірибелерден алынады. Осы жолмен табылған моделдер эмпирикалық (тәжірибелік) деп аталады. Осындай моделдерді жасау есептері (басқару объекттердің динамикалық сипаттамаларын табу) идентификациялау теориясында қарастырылады. Объекттің динамикалық сипатамаларын анықтау тәжірибелік әдістері үш негізгі топқа бөлінеді: идентификациялаудың тура әдістері, параметрлі және параметрлі емес идентификация.
«Басқару объектілерді моделдеу және идентификациялау» пәні бойынша ұсынылып отырған әдістемелік нұсқаулар 7 жұмыстан тұрады, моделдеудің аналитикалық және идентификациялау әдістерін менгеруге негізделген. Осы жұмыстарды орындау үшін көбінесе MatLab бағдарламалық жүйенің әр түрлі құралдары қолданылады:
- тура есептеу режимінде (бұйрық терезеде), яғни бағдарламаны жазбай. Сонымен бірге бұйрық терезе MatLab жүйесінің басқа пакеттерінде жұмыс жасағанда қолданылады. Мысалы, әр түрлі пакеттер арасында мәліметтер тікелей емес тек қана бұйрық терезе арқылы тасымалданады;
- процедураларды қолдану үшін редакторының арнайы терезесінде М-файл-ды жасау;
- сызықты және сызықты емес динамикалық жүйелерді блоктық моделдеу үшін пайдаланушыға ыңғайлы және қарапайым құралдарын, соның ішінде визуалды объектті-бағытталған бағдарламалау құралдарын ұсынатын. Simulink пакеті;
- жүріс-тұрыстары сыртқы оқиғадан тәуелді жүйелерді моделдеу MatLab + Simulink жүйесінің Stateflow арнайы кеңейтілуі. Бұл пакеттің моделденетін жүйенің жұмысын визуалды көрсетуге негізделген өзінің графикалық интерфейсі бар;
- корреляциялық, спектрлік және әртүрлі ретті параметрлік моделдерді құруға Matlab жүйенің System Identification Toolbox пакетін;
- функцияны белгілі функциялар жүйесі бойынша қатарларға жіктеу есептерін шешуге арналған қисықтарды қиыстырып келтіру Curve Fitting Toolbox пакеті.
Жиілік сипаттама көмегімен объектті идентификациялау есебіне «Инженерлік кибернетика» кафедрасында өңделген бағдарлама қолданылады.
1 Зертханалық жұмыс №1. Жинақталған параметрлері бар объектті аналитикалық әдісімен моделдеу
Жұмыс мақсаты: жинақталған параметрлері бар объекттерді моделдеуге негізгі сақталу заңдылықтарын қолдануды үйрену; MatLab программасының Simulink пакетінде объекттерді моделдеу мен анализдеу әдістерін дағдылану.
1.1 Зертханалық жұмысқа тапсырма
Зертханалық жұмысты жасау барысында студент келесі тапсырмаларды орындау керек:
- жинақталған параметрлері бар басқару объекттерді моделдеудің аналитикалық әдістерін оқыңыз [1,2];
- MatLab жүйесінің Simulink пакетінде объекттерді моделдеу амалдарымен танысыңыз [1,4];
- моделденетін процесімен танысу;
- Simulink пакетінде қарастырылып отырған процестің динамикалық моделінің блок-диаграммасын құрыңыз;
- зерттеу мақсатымен моделде имитациялық тәжірибелерді өткізіңіз;
- алынған нәтижелерді талқылаңыз, қорытынды жасаңыз.
1.2 Процесті бейнелеу
Зерттеу объект ретінде диірмен қарастырылады. Диірменге ірі фракциялардан тұратын өңделетін заттың Ф0 кіріс ағыны түседі. Диірменнен шығатын Фш ағыны диірмендегі заттың М массасына пропорционалды
![]()
мұнда a - пропорционалдық тұрақтысы.
Диірменде ірі фракциялар W жылдамдылығымен ұнтақталады, бұл жылдамдылық ірі фракциялар массасына пропорционалды, және келесідей тәуелділікпен сипатталады
![]()
бұл жерде ![]() .
.
Мұнда m - диірмендегі ұсақ фракциясының массасы;
С - ұсақ фракцияның үлесі;
k0 (1/час) - ұсақтау жылдамдылығының тұрақтысы;
М+ - ұсақтау максималды жылдамдылығына (диірменнің максималды өнімділігіне) сәйкес масса;
М+ = 10 т; k0 = 1,5 (1/сағ) тең деп алынады.
Диірменнің өнімі
шығудағы ағыннан тәуелді деп, келесідей ![]() функция ретінде
қарастырылады, сонда
функция ретінде
қарастырылады, сонда ![]()
Процестің дифференциалдық теңдеулер жүйесі түріндегі математикалық моделі моделдеудің аналитикалық әдістері негізінде құрастырылады. Процестің математикалық моделін құрастырғанда келесі баланстік теңдеулер қолданылады:
а) диірмендегі жалпы массасының балансы
 ;
;
б) диірмендегі ұсақ фракциялар массасының (дайын өнімнің) балансы
![]() .
.
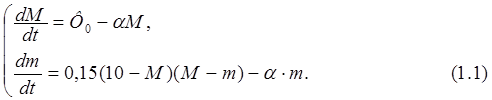
Сонымен, қарастырылып отырған процесті бейнелейтін дифференциалдық теңдеулер жүйесінің соңғы түрі келесідей болады
1. 3 Simulink пакетінде объект моделінің блок-сұлбасын құру
Simuink пакеті сызықты және сызықты емес динамикалық жүйелер мен құрылғылардың функционалды блок-сұлбаларымен көрсетілетін математикалық моделдерін жасауға негізделген.
Моделденетін құрылғылардың функционалды блок-сұлбаларын құрастыру үшін MatLab жүйесінің Simulink пакетінде блоктық компонентерінің кеңейтілген библиотекасы және блок-сұлбаларды өңдеуге негізделген ыңғайлы редакторы бар. Стандартты элементарлы түйіндердің қосылуының сұлбаларын графикалық түрде жинап, зерттелетін жүйелердің сипаттамалары диалогты режімде енгізіледі. Нәтижесінде зерттелетін жүйенің моделі құрастырылады, ол S-модель деп аталады. Моделдер .mdl кеңейтілуі бар файлдарда сақталады.
Simulink моделдеудің ең қиын қадамын автоматтандырады: берілген функционалды сұлбаны (моделді) бейнелейтін күрделі алгебралық және дифференциалдық жүйелерін құрастырады және шешеді, сонымен бірге пайдаланушы құрастырған виртуалды құрылғының жүріс-тұрысын ыңғайлы және көрнекі визуалды бақылауын қамтиды.
S-моделді жасау үшін Simulink библиотекасының блоктары қолданылады. Simulink блоктар библиотекасы визуалды объекттер жиыны болып табылады, оларды қолданып қажетті құрылымды жасауға болады. Әр блок үшін блоктар көшірмелерінің керекті санын алуға және әр көшірмені бөлек қолдануға болады. Барлық блоктар үшін оларды жеке қалпына келтіру мүмкіндігі бар: пайдаланушы блоктардың ішкі параметрлерін (мысалы, кіріс санын) және сыртқы түрін (өлшемін, бояуын, атын, т.б) өзгертуіне болады. Блоктардың бір бірімен байланысуынада еш қандай шектеулер қойылмайды. Әрине, блоктарды бір бірімен байланыстырғанда кейбір ережелер орындалуы керек, бірақ олар Simulink талаптарынан емес, моделдің өзінің жұмыс логикасына тәуелді.
Библиотека құрамына пайдаланушының блоктарын қосуға болады.
Қарастырылып отырған процестің моделі M(t) ірі массасы мен m(t) ұсақ массасын анықтауға негізделген дифференциалдық теңдеулер жүйесі болып табылады.
Моделдің (1.1) теңдеулерін блок-сұлбаларға түрлендіру үшін келесі идея қолданылады. Біріншіден M және m айнымалылары белгілі деп есептеп, теңдеулердің оң жақтағы өрнектерін құрастырамыз. Ол үшін Fcn блогы қолданылады (әр теңдеу үшін блоктың бөлек данасы), блоктың қалпына келтіру терезелерінде теңдеулердің оң жақтағы өрнектері бағдарламалау тілдер ережелеріне сәйкес құрастырылады. Бұл блоктың тек қана жалғыз кіріс порты бар. Егер де блок кірісіне бірнеше сигналды беру керек болса, оларды Mux блогының көмегімен бір векторға бірліктіру керек. Fcn блогының кірістегі сигналы (скаляр немесе вектор) u әрібімен белгіленеді, бұл сигнал вектор болса, оның компонеттері u(1), u(2),..., деп белгіленеді, вектор компонеттері кіріске берілген ретімен нөмірленеді. Теңдеулердің оң жақтағы орнектерін құрастыру нәтижесінде dM/dt және dm/dt өрнектердің шамаларын аламыз.
Осы өрнектерді арнайы Integrator блогы көмегімен интегралдап, ізделінген M(t) және m(t) мәндерін аламыз. Алынған шамаларды енді теңдеулердің оң жағын құрастыруға қолданамыз (кері байланыс арқылы). Сонымен бірге оларды Scope қарап шығу терезесіне беруге болады.
1.4 Зертханалық жұмысты орындау тәртібі
1.4.1 MatLab ортаның бұйрық терезесінен File-New-Model меню немесе құралдар панелінен сәйкес батырманы басып Simulink пакетін жұмысқа қосыңыз
1.4.2 Пайда болған терезеде жаңа модел орынын – untitled терезесін жасаңыз. Экран түрі 1.1 суретте келтірілген Қарастырылып отырған процесс моделінің блок-сұлбасын құрастыруын бастаңыз.
Ескерту - блок-сұлбалардағы блоктарға маңызды аттарды меншіктеңіз (процес пен теңдеулердегі айнымалылар аттарын). Сонда диаграмманы жеңіл түсінесіз және өзгерулерді жасағанда жаңылмайсыз.
1.4.3 Φ0 кіріс ағынын құрастырыңыз:
- диаграмма терезесіне Mux (айнымалыларды бір векторға біріктіру үшін), Fcn (кіріс ағынның өрнегін құрастыру үшін), Constant (өрнектердің коэффициенттер мәндерін орнату үшін) блоктарын орнатыңыз. Кірудегі ағын уақыттан ашық түрде тәуелді функция болғандықтан, Clock блогын орнату керек;
- Mux блогының кіріс сандарын орнатыңыз, блокты Fcn блогымен байланыстырыңыз;
- Fcn блогының қалпына келтіру терезесін ашыңыз, кіріс вектор ретінде Mux болгының шығыс векторын қолданып, кіріс ағынның өрнегін орнатыңыз; Fcn блоктың шығысын әзірше бос қалдырыңыз.
1.4.4 Моделдің бірінші теңдеуінің блок-сұлбасын жинаңыз:
- диаграмма терезесіне Mux (айнымалылардың барлығын бір векторға біріктіру үшін), Fcn (теңдеудің оң жақтағы өрнегін құрастыру үшін), , Integrator (теңдеудің оң жағын интегралдау үшін) және Scope (интегралдау нәтижесін қарап шығу үшін) блоктарын орнатыңыз;
- жасалған блоктарды аталған ретімен байланыстырыңыз;
- Mux блогының кіріс сандарын орнатыңыз (на один из входов блока Mux блоктың бір кірісіне алдында 1.4.3 тарауда жасалған Fcn блогының сигналын беріңіз;
- кіріс айнымалылар ретінде кіріс ағынның Φ0 функциясы мен моделдеу нәтижесінде алынған M(t) мәндерін қолданып, Fcn блогын қалпына келтіріңіз;
- Fcn блоктың шығысын Integrator блогының кірісіне беріңіз;
- Integrator блогының шығысын Scope терезесіне шығарыңыз және кері байланыс арқылы Mux болгының беріңіз.
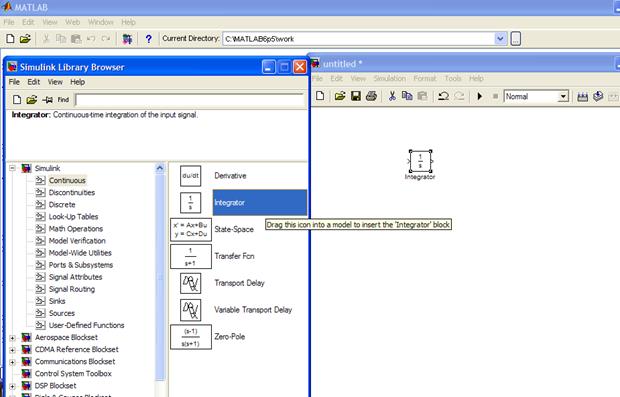
1.1 сурет – Simulink пакетінің жаңа моделді жасаудың терезесі
1.4.5 Алдынғы 1.4.3 тарамағындай екінші теңдеу үшін диаграманы жинаңыз; мұнда кіріс айнымалылар ретінде бірінші теңдеудің диаграммасында алынған M(t) мәндері және моделдеу нәтижесінде пайда болатын m(t) мәндері қолданылады; мұндада Fcn блоктың шығысы Integrator блогына беріледі, ал соңғы блоктың шығысы ізделінетін m(t) шамасы болып табылады.
1.4.6 Екінші теңдеудің
диаграммасының m(t) шығысын Gain блогымен
байланыстырып, зерттелетін ![]() өнімділігін алыңыз, Р шамасын
Scope терезесіне шығарыңыз.
өнімділігін алыңыз, Р шамасын
Scope терезесіне шығарыңыз.
1.4.7 Диаграмма файлын сақтаңыз. (вариант бойынша). Ең өнімді режимдерді табыңыз.
1.4.8 Модел диаграммасын қолданып имитациялық тәжірибелерді өткізіңіз. Тәжірибелер барысында кіріс ағынның коэффициенттер мәндерін өзгертіп отырып (Constant блоктарында), диаграмманы орындалуға қосып, шығыс айнымалының графиктерін бақылап отыру қажет.
Коэффициенттер мәндерін еркін таңдамай, аргументтер мәндерінің мүмкін болатын, мүмкін емес, арнайы, т.с. аймақтарын анықтап, осы аймақтардағы шығыс айнымалының жүріс-тұрысын зерттеңіз.
1.4.9 Өнімі жоғары режимдерді табыңыз.
1.5 Есеп берудің құрамы
Зертханалық жұмыс бойынша есеп беру келесіден тұрады:
- зертханалық жұмыстың мақсаты мен тапсырмасы;
- қарасытырылып отырған процесс моделінің теңдеулері;
- түсініктемелері бар моделдің блок-диаграммасы;
- орындалған тәжірибелердің маңызды нәтижелерінің листингтері;
- жұмыс бойынша қорытынды.
1.6 Тапсырмалар нұсқалары
1.6.1 Диірмен өнімділігінің
кірудегі ![]() ағыннан тәуелділігін зерттеу. Өнімі жоғары
режимдерін табу.
ағыннан тәуелділігін зерттеу. Өнімі жоғары
режимдерін табу.
1.6.2 Диірмен өнімділігінің кірудегі ![]() ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
1.6.3 Диірмен өнімділігінің кірудегі ![]() ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
1.6.4 Диірмен өнімділігінің кірудегі ![]() ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
1.6.5 Диірмен өнімділігінің кірудегі ![]() ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
1.6.6 Диірмен өнімділігінің кірудегі  ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
ағыннан тәуелділігін зерттеу.
Өнімі жоғары режимдерін табу.
1.6.7 Өзгеріп тұратын кірудегі ![]() ағынның w жиілігінің диірмен өнімділігіне
әсерін зерттеу. Кірудегі ағын тербелістерінің ең
қауыпты жиіліктерін табыңыз.
ағынның w жиілігінің диірмен өнімділігіне
әсерін зерттеу. Кірудегі ағын тербелістерінің ең
қауыпты жиіліктерін табыңыз.
1.6.8 Өзгеріп тұратын кірудегі ![]() ағынның А амплитудасының
диірмен өнімділігіне әсерін зерттеу. Кірудегі ағын
тербелістерінің ең қауыпты амплитудаларын табыңыз.
ағынның А амплитудасының
диірмен өнімділігіне әсерін зерттеу. Кірудегі ағын
тербелістерінің ең қауыпты амплитудаларын табыңыз.
1.6.9 Кірудегі ағын ![]() өрнегімен берілген. Өзгеріп отыратын
өрнегімен берілген. Өзгеріп отыратын ![]() коэффициенттің w жиілігінің диірмен өнімділігіне
әсерін зерттеу. a коэффициентінің өзгерунің
оптималды режимін табыңыз.
коэффициенттің w жиілігінің диірмен өнімділігіне
әсерін зерттеу. a коэффициентінің өзгерунің
оптималды режимін табыңыз.
1.6.10 Кірудегі ағын ![]() өрнегімен берілген. Өзгеріп отыратын
өрнегімен берілген. Өзгеріп отыратын ![]() коэффициентінің a1
A амплитудасының
диірмен өнімділігіне әсерін зерттеу. a
коэффициентінің өзгерунің оптималды режимін табыңыз.
коэффициентінің a1
A амплитудасының
диірмен өнімділігіне әсерін зерттеу. a
коэффициентінің өзгерунің оптималды режимін табыңыз.
1.7 Бақылау сұрақтары
1.7.1 Математикалық моделдердің негізгі типтері қандай?
1.7.2 Моделдеудің аналитикалық және тәжірибелік әдістерінің айырмашылығы?
1.7.3 Қарастырылған процестің модел теңдеулерін шығаруға қандай сақтау заңдары қолданылды?
1.7.4 Қарастырылған процесс моделі моделдердің қай класына жатады?
1.7.5 Модел түрінен оның динамикалық болатынын қалай анықтауға болады?
1.7.6 Simulink пакетінің міндетін түсіндіріңіз.
1.7.7 Дифференциалдық теңдеудің блок-диаграммасын құрудың ретін түсіндіріңіз.
1.7.8 Clock, Integrator, Fcn, Gain блоктарының жасалатын диаграммадағы міндеттерін түсіндіріңіз.
1.7.9 Кіріс ағынды іске асыру үшін Clock блогы неге қажет?
1.7.10 Fcn блогының кіріс сигналы қандай әріппен белгіленеді?
2 Зертханалық жұмыс №2. Резервуардағы процестің статикалық және динамикалық сипаттамаларын зерттеу
Жұмыс мақсаты: Simulink пакетінде объекттің динамикалық сипаттамаларын моделдеу және анализдеудің дағдыларын бекіту; MatLab жүйесінің оқиғалық модельдеу Stateflow пакетінде жұмыс істеуді үйрену.
2.1 Зертханалық жұмысқа тапсырма
Зертханалық жұмысты жасау барысында студент келесі тапсырмаларды орындау керек:
- MatLab жүйесінің оқиғалық модельдеу Stateflow пакетін оқыңыз [1,4];
- моделденетін объектпен танысыңыз;
- қарастырылып отырған объекттің статикалық және динамикалық моделдерінің блок-диаграммаларын Simulink пакетінде құрыңыз;
- моделдеу интервалының әртүрлі уақыт аралығының моменттерінде статикалық және динамикалық моделдер бойынша есептеулер өткізіңіз;
- объектті басқаруды моделдеу бойынша имитациялық тәжірибелер өткізіңіз.
2.2 Объектті бейнелеу
Тәуелсіз кірудегі Gк(t) сұйықтық ағыны және шығудағы тәуелді Gш(t) ағыны бар резервуар зерттеу объектісі болып табылады. Шығудағы ағын төгу үшін негізделген тесіктен жоғары сұйықтық H деңгейімен және сол тесіктің кесіндісінің fк ауданымен анықталады. Резервуардағы төгу үшін негізделген тесіктен жоғары орнатылған сұйықтық мөлшері келесі өрнекпен анықталады
![]()
мұнда F – резервуардың табанының ауданы;
ρ – тығыздылық.
Объекттің математикалық моделінің теңдеулерін құрастырғанда келесілер қолданылады:
- объекттің материалдық баланс теңдеуі:
 (2.1)
(2.1)
- қозғалысты сақтау заңын бейнелейтін теңдеу:
![]() . (2.2)
. (2.2)
Объект күйінің координаттары ретінде резервуардағы сұйықтық H деңгейімен шығудағы Gш(t) ағынды таңдаймыз.
Объекттің статикалық моделі келесі түрде жазылады:
 ,
,
![]() . (2.3)
. (2.3)
Объект динамикасы келесі дифференциалды теңдеумен бейнеленеді:
![]() , (2.4)
, (2.4)
мұнда Gш үшін (2.2) өрнегі орындалады.
Зертханалық жұмыста моделдеудің жалпы интервалының әр түрлі уақыттық интервалдарында статикалық (2.3) немесе динамикалық (2.4) моделдер көмегімен есептеулерді орындау керек. Объекттегі өтпелі процестер кірудегі Gк(t) және fк айнымалылардың өзгеру себебінен пайда болады.
Осы моделдерді кезегімен қосу үшін және моделдерге параметрлердің жаңа мәндерін беріп тұру үшін Statefiow пакетті қолдану қажет.
2.3 Объектті басқаруға негізделген Statefiow ішкі жүйесі
Simulink пакетінің негізгі міндеті жүйелерді имитациялық моделдеу болып табылады. Сонымен бірге жүйенің жүріс-тұрысына сыртқы оқиғалардың әсерлері есепке алынбайды немесе тек қана әсер көздерінің уақыт бойынша тәуелділіктері есепке алынады. Әртүрлі оқиғалардың пайда болуы жүйенің жұмысына маңызды әсер ететін жағдайда көптеген жүйелер жұмыс жасайды. Жүріс-тұрыстары сыртқы оқиғалардан (ситуациялардан) тәуелді болатын жүйелерді моделдеу оқиғалық немесе ситуациялық моделдеу деп аталады. MatLab жүйесінің Simulink пакетінде осындай моделдеу арнайы Stateflow кеңейтілу пакеті көмегімен жасалынады. Бұл пакеттің өзінің пайдаланушының графикалық интерфейсі бар, оны қолданып SF-диаграммалар деп аталатын графикалық диаграммаларды құрастыруға болады. Бұл диаграммалар моделденетін жүйенің жұмысын визуалды көрсетуге негізделген. Оған жету үшін жүйенің жұмысының барлық қадамдары анализденеді, сонымен бірге көрсетілген уақыттағы пассивті немесе активті болатын блоктар және әр түрлі шарттарды анализдеу негізінде олар арасындағы көшулердің орындалуы анализденеді.
Statefiow-диаграмманы жасау үшін біріншіден Simulink-те моделді жасау немесе бар моделді ашу керек. Содан кейін библиотекадан Statefiow диаграммасының блогын таңдап, оны өзіңіздің моделіңізге орнату керек. Осы блокты ашқан кезде Statefiow (chart) (2.1 суретті қараңыз) терезесі пайда болады; менюді және инструменттер панелін қолданып, осы терезеде күйлер мен олар арасындағы байланыстарды бейнелейсіз, айнымалылырды, қажетті көшулерді және басқа басқаруға қажетті элементтерді анықтайсыз.
Statefiow диаграммасында элементтердің негізгі екі тобы бар: графикалық және графикалық емес. Диаграмманың барлық графикалық элементтері күйлер карталарын редакторының негізгі терезесінің сол жақтағы панелінде орнатылған.
SF-диаграмманың маңызды объектісі күй (state) болып табылады. Әрбір күй оқиғалы-басқарылатын жүйенің жұмысының бір режимін бейнелейді. Егер де күйге келтіретін көшу шарты «ақиқат» мәнін қабылдаса немесе бұл күй бастапқы болса, күй активті болады. Statefiow диаграммасында әр күйдің «анасы» бар және оның «мұрагерлері» болуы мүмкін. Егер де күй жалғыз болса, оның анасы Statefiow диаграммасының өзі болып табылады (түбір диаграммасы).
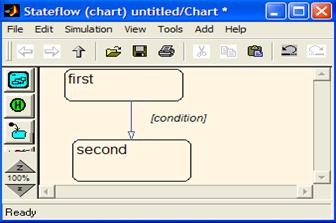
2.1 сурет – Қарапайым SF-диаграмма
Күйдің графикалық бейнесін жасау үшін, панелден сәйкес батырманы таңдап, орнатылатын орынға тінтуір батырмасын басып орналастырамыз.
Күй активті болған кезде орындалатын әрекеттерді анықтайтын күйдің мәтіндік белгілері болады. Күйдің атауы бірінші енгізіледі. Күйді бейнелегенде келесі әрекеттер анықталуы мүмкін:
- name – күй аты;
- entry – күйге кірген кезде орындалатын әрекет;
- during - күй активті болып тұрғанда орындалатын әрекет;
- exit – күйден шыққан кезде орындалатын әрекет;
- on: {оқиға аты} – жүйе осы күйде орнатылса, оқиға пайда болған кезде (аты жақшада орнатылған) орындалатын әрекет.
SF-диаграмманың тағы бір маңызды графикалық объектісі - көшулер (Transition). Көшулер бір объекттің басқа объектпен байланысын көрсетеді және диаграммада стрелкалармен көрсетіледі, оның басы көз болатын күйде, ал соңы – қабылдаушы болатын күйде орнатылады. Құралдар панелінде көшулердің өз батырмасы жоқ. Көшуді сызу үшін тінтуірді көз болатын күйде орнатып, тінтуірдің сол жақтағы батырмасын басып тұрып, пайда болған көрсеткішті қабылдаушы күйге дейін созамыз. Көшу шарттарын бейнелейтін және көшу кезде орындалатын көшулердің белгілері бар. Белгі мәтінінің форматы
Event [condition] {condition_action}/transition_action,
мұнда Event – көшуді бастайтын оқиғаны анықтайды. Егер де оқиға аталмаған болса, көшу логикалық өрнегі орындалған кезде басталады. Егер де көшуді бастайтын оқиғалар бірнеше болса, олар бір-бірінен OR операторымен бөлініп, барлығы аталады;
сondition – ақиқат болған кезде көшуді бастайтын логикалық өрнек;
condition_action – көшудің өзі әлі ақиқат болып анықталмай (қабылдаушы күй анықталмады) бірақ көшу шарты ақиқат болғаннан кейін орындалатын әрекет;
transition_action – егер де алдында бейнеленген шарттардың барлығы ақиқат болса және қабылдаушы күй анықталған болса, орындалатын әрекетті анықтайды.
Statefiow пакетінің маңызды түсініктемесі оқиғалар (Event) – бұл графикалық емес диаграмманы басқаратын объекттер. Оқиғаны визуалдау үшін көшу белгілерін қолдануға болады. Stateflow диаграммасына қатысты оқиғалардың барлығы анықталған болуы керек. Оқиғалардың келесі түрлері бар: кіріс; шығудағы; жергілікті; Stateflow мен Simulink диаграммаға сыртқы көздерден еңгізілетін; Stateflow және Simulink диаграммалардан сыртқа берілетін.
SF-диаграмма редакторының Add/Event менюі көмегімен оқиға типін және оның қасиеттерін орнатуға болады.
Мәліметтер – сандық мәліметтерді сақтауға негізделген Stateflow диаграммасындағы графикалық емес объекттер. Айнымалыларды иерархияның кез-келген деңгейінде қолдануға болады. Мәліметтерді жасауға және өзгертуге Add/Data менюді қолдану керек.
2.3 Зертханалық жұмысты орындау тәртібі
2.3.1 MatLab жүйесінің Simulink пакетінде объекттің статикалық және динамикалық моделдерінің блок-диаграммаларын құрастырыңыз (объекттің айнымалыларының бастапқы мәндері мен параметрлерінің мәндерін студент өз бетінше таңдайды).
2.3.2 Осы диаграммаларды Subsystem (ішкі жүйе) ретінде яғни төменгі деңгейдегі моделдері бар S-моделдер ретінде орнатыңыз. Subsystem-ді жасаудың бір жолы: оған кіретін барлық блоктарды белгілеп, контексттің менюден сәйкес бұйрықты таңдау керек.
Ішкі жүйеге стандартты In (Кіріс) және Out (Шығыс) блоктарын енгізу жолымен оның негізгі жүйемен байланысы орнатылады. Негізгі жүйеде пайда болатын және ішкі жүйеде қолданылатын барлық шамалар ішкі жүйеге In блоктары арқылы түседі, ал ішкі жүйеде құрастырылып, соңынан негізгі жүйеде қолданылатын шамалар ішкі жүйеден негізгі жүйеге Out блоктары арқылы түседі. Блок-диаграммаларда айнымалыларға (блоктарға) түсінікті атауларды меншіктеу керек екенін естеріңе саламыз.
2.3.3 Switch блогының міндеті мен қолдану ретімен танысыңыз [1,2], осы блокты модель диаграммасы терезесінде орнатыңыз.
2.3.4 Статикалық және динамикалық моделдер арасында қайта қосылуды орнату үшін Switch блогын қолданыңыз: осы блоктың басқару портына жүйелік уақыт беріледі (Clock блогы), ақпараттық блоктарына статикалық және динамикалық моделдердің шығыстары беріледі.
2.3.5 Өңделген моделде имитациялық тәжірибелерді өткізіңіз:
- (t0 - t1) уақыттық интервалы тепе-теңдік күйді көрсетеді;
- (t1 – t2) уақыттық интервал резервуардағы өтпелі процесті көрсетеді (t0, t1, t2) мәндерін студент өз бетінше жалпы моделдеу уақытына сәйкес таңдалынады);
- өтпелі процестің графиктерін Scope блогына шығарыңыз.
2.3.6 Объектті басқаруды моделдеңіз. Терезеге Chart блогын орнатыңыз. Блокты ашып, моделдің SF-диаграммасын жасаңыз:
- терезеде state объекттің үш данасын орнатыңыз;
- осы объекттің бірінші данасында Gn, Gc, fc айнымалыларының бастапқы мәндерін орнатыңыз; көшуге себеп болатын оқиға жүйелік уақыт болып табылады: t1 уақыттан кейін ағынның төгілуі үшін негізделген тесіктің кесіндісі өзгереді;
- блоктың кіріс (жүйелік уақыт) және шығыс (моделдеу процесінде өзгеретін айнымалыларын) орнатыңыз.
2.3.7 Динамикалық моделінің ішкі жүйесін блок-диаграмма терезесінің басқа жеріне көшіріңіз. Резервуардың динамикалық моделіне Chart блогын қосығыз.
2.3.8 Өтпелі процесті Scope терезесінде көрсетіңіз.
2.3.9 Жасалған диаграммада объектті басқару бойынша имитациялық тәжірибелерді өткізіңіз.
2.4 Есеп беру құрамы
Зертханалық жұмыс бойынша есеп беру келесіден тұрады:
- зертханалық жұмыстың мақсаты мен тапсырмасы;
- резервуардың статикалық және динамикалық моделдерінің теңдеулері;
- түсініктемелері бар моделдердің блок-диаграммалары;
- осы моделдерде өткізілген тәжірибелер нәтижелері;
- әртүрлі уақыт интервалындағы жүйенің жұмысын сипаттайтын SF-диаграммасы;
- жасалған имитациялық тәжірибелердің графиктері;
- жұмыс бойынша қорытынды.
2.5 Тапсырма нұсқалары
Объекттің айнымалыларының бастапқы мәндері мен параметрлерінің мәндерін студент өз бетінше таңдайды.
2.6 Бақылау сұрақтары
2.6.1 Өңделген модел қай класқа жатады?
2.6.2 Моделденетін объекттің қандай айнымалылары модел кірістері болады?
2.6.3 Моделденетін объекттің қандай айнымалылары модел шығыстары болады?
2.6.4 Статикалық және динамикалық моделдің анықтамасын беріңіз.
2.6.5 Қарастырылып отырған объектте өтпелі процестер қандай жағдай себебінен пайда болуы мүмкін?
2.6.6 Stateflow пакетінің міндеті неде?
2.6.7 SF-диаграмма деген не?
2.6.8 Stateflow пакетіндегі «күй» деген анықтаманы түсіндіріңіз.
2.6.9 Көшулер деген не?
2.6 10 Stateflow пакетінде мәліметтер қалай жасалады және өзгертіледі?
3 Зертханалық жұмыс №3. Бірінші ретті сызықты объектті идентификациялаудың тура әдістері
Жұмыс мақсаты: сызықты динамикалық объекттерді өтпелі функция көмегімен идентификациялаудың әдістерін үйрену.
3.1 Зертханалық жұмысқа тапсырма
Зертханалық жұмысты жасау барысында студент келесі тапсырмаларды орындау керек:
- бірінші ретті сызықты объектті графикалық идентификациялаудың әдісін оқу [1,2] ;
- өтпелі функция көмегімен объектті идентификациялауға блок-диаграмманы жинаңыз;
- объекттің беріліс функциясының параметрлерін анықтаңыз;
- идентификации дәлдігін анықтаңыз.
3.2 Өтпелі функция көмегімен идентификациялау әдісі
Басқару жүйелердегі бірінші іске асырылған идентификациялау әдістері жиілік, сатылы және импульсті әсерлерді қолдануда негізделген болған. Бұл әдістер (идентификациялаудың тура әдістері) кірістегі арнайы түрдегі сигналдарын қолдануын талап етеді: өтпелі функциямен идентификациялауға сатылы сигналдарды, импульсті өтпелі функциямен идентификациялауға кірістегі импульсты сигналдарды және жиілік сипаттамаларды анықтау үшін әр түрлі жиілікттерде анықталған кірістегі синустық функцияларды.
Көп деген жағдайларда жүйенің беріліс функциясын анықтау үшін оның өтпелі функциясының графигін қолдануға болады. Бұл әдісті сызықты жүйелердің көбісіне қолдануға болады (1 және 2 ретті және жоғарғы ретті апериодикалық жүйелерге). Өтпелі функция көмегімен графикалық идентификациялау әдісі бірінші ретті объекттерге жақсы дәлдікпен қолданылады.
Бірінші ретті объект қарастырылады. Осындай объекттер үшін ізделінетін теңдеуі келесідей:
![]() немесе
немесе ![]() . (3.1)
. (3.1)
Объектте тәжірибелер өткізіледі: t0=0 уақыт моментінде x мәні кенет өзгеру жолмен a мәніне өзгереді және өтпелі процестің графикі жазылады. Осы графикті қолданып, беріліс функцияның T және k параметрлерін анықтау қажет.
(3.1) дифференциалдық теңдеудің жалпы шешімінің өрнегі:
 . (3.2)
. (3.2)
(3.2) функциясы өтпелі процестің графигін сипаттайды. Қарапайымдау үшін а=1 қабылдаймыз.
Беріліс функцияның параметрлерін анықтау келесі жолдарымен орындауға болады:
а) (3.2) өрнектен ![]() болғанда,
болғанда, ![]() болатыны белгілі.
Басқа жағынан
болатыны белгілі.
Басқа жағынан ![]() болғанда
шығу сигналының тұрақтанған шамасы орнатылады.
Басқа сөзбен айтқанда объекттің
тұрақтанған күйінің ординатасы арқылы
(графикте) k параметрін анықтауға болады.
болғанда
шығу сигналының тұрақтанған шамасы орнатылады.
Басқа сөзбен айтқанда объекттің
тұрақтанған күйінің ординатасы арқылы
(графикте) k параметрін анықтауға болады.
t = T болғанда ![]() болады. Яғни
бірінші ретті жүйенің T уақыт тұрақтысы
өтпелі функция өзінің тұрақталған
шамасының 63% жеткендегі уақыт бөлігіне тең;
болады. Яғни
бірінші ретті жүйенің T уақыт тұрақтысы
өтпелі функция өзінің тұрақталған
шамасының 63% жеткендегі уақыт бөлігіне тең;
б) k коэффициенті а) тарамындағыдай анықталады.
T параметрін анықтау үшін (3.2) өрнекті дифференциалдаймыз
![]() .
.
Бастапқы нүктеде
![]()
Яғни (туындының геометриялық түсініктемесінен)
![]()
мұнда α – функция графигіне t = 0 болғанда жанаманың қисаю бұрышы.
Басқа жағынан, жанама, абциссалар осі, жанамының тұрақтанған күймен қиылысқан нүктесінен абциссалар осіне орнатылған перпендикуляр, тік бұрышты үшбұрышты жасайды; онда tgα қарсы жатқан катеттің жатқан катетіне қатынасы болып табылады. Яғни жатқан катет T шамасы болады.
Сонымен, ![]() шамасы координаттар осінің басынан жанама асимптотамен
қиылысатын нүктенің абсциссасына дейінгі аралық.
шамасы координаттар осінің басынан жанама асимптотамен
қиылысатын нүктенің абсциссасына дейінгі аралық.
3.3 Зертханалық жұмысты орындаудың тәртібі
3.3.1 Моделдерді жөндейтін Simulink терезесіне Work/Objects3 папкадан өзіңіздің «объектіңізді» жүктеңіз (нұсқа бойынша).
3.3.2 Кіріс сигнал ретінде сатылы сигналды орнатыңыз, шығудағы сигналдың графигін Scope көріп шығу терезесіне шығарыңыз.
3.3.3 Алынған графикті қолданып әдістердің екеуімен де (а және б) бірінші ретті объектт параметрлерін анықтаңыз. Нәтижесінде беріліс функциялар түріндегі екі модел пайда болады. Осы моделдердің өрнектерін жазыңыз.
3.3.4 Қалпына келтірілген моделдер көмегімен, олардың кірістерінде қолданған сатылы сигналды беріп, шығудағы сигналдарды алыңыз (алынған диаграмманың жалпы түрі 3.1 суретте келтірілген).
3.3.5 «Объект» және моделдер көмегімен алынған өтпелі процестердің графиктерін салыстырыңыз. Моделдің қайсысының дәлдігі жоғары? Неге солай?
3.4 Есеп беру құрамы
Зертханалық жұмыс бойынша есеп беру келесіден тұрады:
- зертханалық жұмыстың мақсаты және тапсырмасы;
- Scope терезесінде өтпелі процесс, оның графигінің жанамасы, 63% -дық белгі және тұрақтанған шама орнатылуы керек;
- екі әдәспен анықталған беріліс функциялардың параметрлері;
- объекттің және екі моделдің блок-диаграммалары (3.1 сурет сияқты);
- бір терезеде шығарылған объекттпен екі моделдің өтпелі процестерінің графиктері;
- графиктерді салыстыру анализі; қорытынды.
3.5 Тапсырма нұсқалары
Нұсқалар Simulink пакетінің Work/Objects3 папкасынан таңдалынады.
3.6 Бақылау сұрақтары
3.6.1 Идентификация деген не?
3.6.2 Идентификациялаудың қандай әдістері тура әдістер деп аталады?
3.6.3 Сызықты объектт графикалық идентификациялау үшін қандай функция қолданылады?
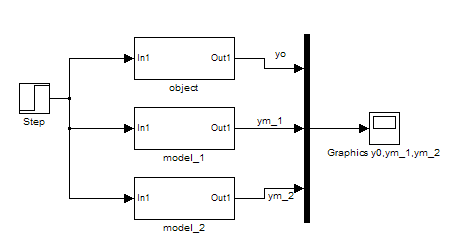
3.1 сурет – Объект және моделдер шығуларын салыстыру блок-диаграммасы
3.6.4 Графикалық идентификация процедурасын өткізуге объект кіріснде қандай функция қолданылады?
3.6.5 Беріліс функцияның k параметрі қалай анықталды?
3.6.6 Беріліс функцияның T параметрін анықтаудың әдістерін түсіндіріңіз.
3.6.7 Scope терезесіндегі өтпелі процестің графигіне жанаманы қалай құрдыңыз?
3.6.8 Барлық графиктерді бір терезеде орнату үшін қандай блокты қолдандыңыз?
3. 6.9 Идентификациялаудың қандай әдісінің дәлдігі жоғары? Неге?
3. 6.10 Қарастырылған идентификациялау әдісін қандай объекттерге қолдануға болады?
4 Зертханалық жұмыс №4. Сызықты объектті жиілік сипаттама көмегімен идентификациялау
Жұмыстың мақсаты: гармоникалық сигналдар көмегімен идентификациялаудың әдістерін үйрену.
4.1 Зертханалық жұмысқа тапсырма
Зертханалық жұмысты жасау барысында студент келесі тапсырмаларды орындау керек:
- сызықты объектті идентификациялаудың жиілік әдістерін оқу [1,2,3];
- объектті идентификациялауға блок-диаграмманы құрастыру;
- тәжірибелерді өткізу; шығудағы сигналдың амплитудалары мен фазалық ығысуларын анықтау;
- тәжірибе нәтижелерін өңдеудің бағдарламасымен танысу;
- осы бағдарлама көмегімен объекттің АЖС және ФЖС анықтау;
- объекттің беріліс функциясының параметрлерін анықтау;
- идентификация дәлдігін анықтау.
4.2 Жиілік сипаттама көмегімен беріліс функцияның коэффициенттерін анықтау
Жиілік сипаттамалар реттеу жүйелерді анализдуге және синтездеуге кең қолданылады. Сонымен бірге олар объект теңдеулерін анықтауға мүмкіндік береді.
Автоматты басқару теориясынан келесіні білеміз: егер де объект кірісіне
x(t) = A0sin(ωt),
синустік әсер берілсе, онда шығудағы сигналдың тұрақтанған мәні келесі болады
y(t) = A1sin[ωt + φ(ω)] + n(t),
мұнда n(t) - өлшеу қателігі;
A1/ A0 =│W(jω)│;
φ = Arg[W(jω)].
W(jω) жиілік сипаттаманы анықтау үшін әртүрлі ω жиіліктерде A0sin(ωt) синустік кіріс сигналдар беріліп, оларға сәйкес шығудағы A1sin[ωt + φ] сигналдар жазылады. Қажетті жиілік сипаттаманы алу үшін A1/A0 және φ шамалары қарастырып отырған ω әр мәні үшін анықталады. Басқа сөзбен айтқанда кірудегі және шығудағы сигналдардың жазулары бойынша ωi жиіліктегі амплитудалардың қатынастары қарастырылып, │W(jωi)| анықталады. Фазалық φ(ωi) ығысуды x(t) және y(t) қисықтарының максимумдарын салыстырып табады.
Алынған жиілік сипаттамалар объекттің теңдеуін анықтауға мүмкіндік береді. Әдістің мәнісі келесіде. Әрбір жиілік үшін нақты және жорамал жиілік сипаттамалар анықталады
![]()
![]()
Осы мәліметтер
![]()
беріліс
функциясының ![]() , коэффициенттерін анықтауға
қолданылады.
, коэффициенттерін анықтауға
қолданылады.
Коэффициенттерді есептеу үшін беріліс функцияның
өрнегінде әдеттегідей p-ны jω-ға
алмастырып, функцияны нақты және жорамал ![]() бөліктерінің
қосындысы ретінде жазып,
бөліктерінің
қосындысы ретінде жазып, ![]() жиіліктің барлық мәндері үшін
орындалатын өрнекті аламыз. Осы комплексті өрнектен, нақты
және жорамал бөліктерінің коэффициенттерін теңестіріп,
екі теңдеуден тұратын жүйені аламыз. Осы теңдеулерге әртүрлі
ωi мәндерін қойып (жүйе квадратты
болатындай санын), белгісіз коэффициенттерді анықтауға негізделген
жүйені аламыз.
жиіліктің барлық мәндері үшін
орындалатын өрнекті аламыз. Осы комплексті өрнектен, нақты
және жорамал бөліктерінің коэффициенттерін теңестіріп,
екі теңдеуден тұратын жүйені аламыз. Осы теңдеулерге әртүрлі
ωi мәндерін қойып (жүйе квадратты
болатындай санын), белгісіз коэффициенттерді анықтауға негізделген
жүйені аламыз.
Коэффициенттердің алынған мәндерінің дәлелдеу үшін есептеулерді жиіліктердің басқа мәндерінде қайталап, екі есептеудің орта мәнін аламыз.
Егер де объекттің ақиқат реті болжанған реттен жоғары болса, онда қайталау есептеулерде коэффициенттердің мәндерінің айырмашылығы көп болады.
4.3 Өлшеу нәтижелерін өңдеу бағдарламасы
Беріліс функцияның коэффициенттерін анықтау үшін реті жоғары теңдеулер жүйесін есептеу қажет болады. Зертханалық жұмыста бұл үшін Delphi тілінде өңделген Lab4 бағдарламасы қолданылады. Бағдарламаның негізгі терезесі 4.1 суретте келтірілген.
Бұл терезеде жұмыс келесі тәртіппен орындалады:
- ωi жиіліктердің және әр жиілік үшін анықталған амплитудалары мен фазалық ығысуларының мәндерін енгізіңіз;
- «Рассчитать P(jω) и Q(jω)» батырмасын басыңыз, кестеде нақты және жорамал сипаттамаларының мәндері бар тағы екі жол пайда болады;
- қайта қосу көмегімен объекттің ретін орнатыңыз;
- ашылатын тізімдерден жиіліктердің мәндерін таңдаңыз;
- «Рассчитать систему» батырмасын басыңыз;
- бағдарлама терезесінің төменгі оң жағында объекттің беріліс функциясының есептелген коэффициенттерінің мәндері орнатылады.
4.4 Зертханалық жұмысты орындауға тапсырма
4.4.1 Simulink пакетінің терезесіне Work/Objects4 папкасынан өзіңіздің «объектті» жүктеңіз (нұсқа бойынша).
4.4.2 «Объект» кірісіне белгілі амплитудасы бар синустік сигналды беріңіз, шығыста Scope терезесін орнатыңыз.
4.4.3 1 кестесін толтырыңыз. Ол үшін кірістегі сигналдың жиіліктерін өзгертіп отырып сәйкес шығудағы сигналдарды жазып алыңыз. Әр жиілік үшін объекттің амплитудалық және фазалық сипаттамаларын анықтаңыз.
1 к е с т е
|
ωi |
ω1 |
ω2 |
… |
ω10 |
|
A(ωi) |
||||
|
φ(ωi) |

4.1 Сурет – Тәжірибе нәтижелерін өңдеу бағдарламасының негізгі терезесі
4.3.4 Lab4 бағдарламасын жүктеңіз.
4.3.5 1 кестедегі мәліметтерді бағдарлама терезесіне орнатыңыз. P(jω) және Q(jω) есептеңіз.
4.3.6 Объект ретін 2 деп таңдаңыз, жиілік мәндерін орнатыңыз, (1) жүйесін есептеңіз.
4.3.7 Коэффициенттердің алынған мәндерін дәлелдеу үшін басқа жиілік мәндеріне есептеулерді қайталаңыз (объект реті – 2), екі есептеулердің орта мәндерін алыңыз.
4.3.8 Объект ретін 3 деп таңдаңыз, жиілік мәндерін орнатыңыз, (2) жүйесін есептеңіз.
4.3.7 Коэффициенттердің алынған мәндерін дәлелдеу үшін басқа жиілік мәндеріне есептеулерді қайталаңыз (объект реті – 3), екі есептеулердің орта мәндерін алыңыз.
4.3.10 Объекттің сәйкес келетін ретін таңдаңыз, қалпына келтірілген беріліс функцияның өрнегін жазыңыз.
4.3.11 Simulink пакетінде алынған беріліс функциясы бар объект моделін жинаңыз. «Объект» кірісіне берілген сигналдарды модел кірісіне орнатып, бір терезеде объект пен модел шығыстарын шығарып, салыстырыңыз.
4.5 Есеп беру қүрамы
Зертханалық жұмыс бойынша есеп беру келесіден тұрады:
- зертханалық жұмыстың мақсаты мен тапсырмасы;
- тәжірибелерді өткізудің блок-диаграммасы;
- тәжірибе арқылы объектте алынған графиктер;
- толтырылған 1 кестесі;
- беріліс функциясының коэффициентерін анықтауға теңдеулер жүйесі;
- объекттің әр түрлі реті үшін модел коэффициенттері;
- объект пен моделдің шығыстарын салыстыру блок-диаграммасы;
- моделдегі имитациялық тәжірибелердің салыстыру нәтижелері;
- жұмыс бойынша қорытынды.
- тәжірибелерден объектте алынған графиктар;
- объекттің амплитудалық және фазалық сипаттамалары;
- толтырылған 1 кестесі;
- жүйенің әр түрлі реттері үшін коэффициентерінің мәндері;
- модельде өткізілген имитациялық тәжірибелер нәтижелері.
4.6 Тапсырмалар нұсқалары
Нұсқалар Simulink пакетінің Work/Objects4 папкасынан таңдалынады.
4.7 Бақылау сұрақтары
4.7.1 Идентификациялаудың тура әдістері неде тұрады?
4.7.2 Тура әдістерде гармоникалық сигналдарынан басқа қандай сигналдарын қолдануға болады?
4.7.3 Тура әдістерімен қандай объекттерді идентификациялауға болады?
4.7.4 Жиілік әдісті түсіндіріп беріңіз.
4.7.5 Модел реті қалай таңдалынады?
4.7.6 Шығудағы сигналдың фазалық ығысуы қалай анықталады?
4.7.7 Шығудағы сигналдың амплитудасын қалай анықтадыңыз?
4.7.8 Беріліс функцияның коэффициенттерін анықтауға теңдеулер жүйесі қалай құрастырылады?
4.7.9 Модел коэффициенттері қалай дәлелденеді?
4.7.10 Қай моделдің дәлдігі жоғары, олардың айырмашылығы немен байланысты?
5 Зертханалық жұмыс №5. Сызықты динамикалық объекттерді параметрлік идентификациялау
Жұмыс мақсаты: объекттерді параметрлік идентификациялау, функцияларды аппроксимациялау және сәйкессіздік функционалын минимумдау есептерін шешу әдістерін оқу.
5.1 Зертханалық жұмысқа тапсырма
Зертханалық жұмысты жасау барысында студент келесі тапсырмаларды орындау керек:
- сызықты динамикалық объекттерді параметрлік идентификациялау әдістерімен танысу [1,2];
- ортаквадратты критерийді минимумдау процедурасын оқу [1,3];
- объектте тәжірибелерді орындау: объект кірісіне берілген кіріс сигналын беріп, шығыс сигналдың сандық мәндерін тіркеңіз;
- қисықтарды қиыстыру Curve Fitting Toolbox пакетін қолданып, шығыс сигналды таңдалынған теңдеулермен жуықтаңыз (аппроксимациялаңыз);
- объекттің сызықты динамикалық моделінің құрылымын таңдаңыз;
- таңдалынған құрылым үшін сәйкессіздік функционалының түрін жазыңыз;
- тәжірибелер нәтижелерін қолданып модел параметрлерін анықтау;, осы функционалды минимумдау есебін шешіңіз; модель параметрлерін анықтаңыз;
- құрастырылған моделдің дәлдігін бағалау.
5.2 Динамикалық объекттерді параметрлік идентификациялау
Параметрлік жағдайда модел параметрлер жиынымен анықталады, оларды идентификациялау процесс барысында анықтау қажет.
Параметрлік идентификациялау есебін келесідей қоюға болады: тәжірибелік мәліметтер негізінде модел анықталған мағынада ең тиімді (немесе жеткілікті дәлдікпен) объект операторын жуықтайтын параметрлер векторының мәндерін анықтау қажет.
Моделді құру оның құрылымын таңдаудан басталады. Құрылым бақыланатын мәліметтердің өзара байланыстарын параметрлер арқылы анықтайды. Содан кейін кіріс әсерлер жасалып, объектте орнатылады, осы әсерлерге объект реакциясы (шығыс сигналдары) өлшенеді. Кіріс, шығыс сигналдар мен таңдалынған құрылым қабылданған сапа критерийіне сәйкес параметрлердің мәндерін бағалауға қолданылады. Критерий ретінде жиә жағдайда ортаквадратты критерий қолданылады. Оған сәйкес бірдей кіріс сигналға модел мен объекттің шығыс сигналдар айырмашылығының орта квадратының минимумын қамтитын параметрлер бағалары ізделінеді.
Бірөлшемді жағдайда кіріс x = x(t) және шығыс y = y(t) айнымалылар арасындағы байланыс қарапайым дифференциалдық теңдеуімен сипатталады
 (5.1)
(5.1)
бұл жерде

бастапқы  , i =
0,1,…, n-1
шарттарымен бірге.
, i =
0,1,…, n-1
шарттарымен бірге.
Модель (p+l+1) параметрлерімен c= (a0,…,ap-1,b0,…,bl) анықталады.
Идентификациялау процедурасын құру
үшін бастапқы ақпарат болып идентификацияланатын моделдің
(5.1) түрі және ![]() аралығындағы
аралығындағы![]() бақылаулар
болып табылады.
бақылаулар
болып табылады.
(5.1) теңдеуге объекттің бақылауларын - Xt, Yt функцияларын қойғанда, теңдеудің оң және сол жақ бөліктерінің айырмашылығының орта квадраты ретінде сәйкессіздік функцияны құрастырамыз:
 (5.2)
(5.2)
(5.2) функционалын минмумдау есебі тегіс функцияның минмумын іздеудің әдеттегі әдістерімен шешіледі. (5.2) функциясының барлық белгісіз параметрлері бойынша туындыларын нөлге теңестіріп, сызықты теңдеулер жүйесін аламыз; осы жүйенің шешімі минимумдау есебінің шешімі болады.
Алынған жүйені стандартты есептеу әдістерімен шешуге болады. Бірақ жүйенің коэффициенттерін есептеу үшін объекттің кірудегі xt және шығудағы yt сигналдарының туындыларын білу керек. Егер де осы сигналдар аналитикалық түрде берілген болса, әртүрлі ретті туындыларды табудың ешқандай қиыншылықтары жоқ. Зертханалық жұмыста кіріс сигналдары кейбір уақытқа тәуелді функциялар түрінде берілген. Тәжірибе барысында шығыс сигналдардың мәндері мәліметтер массиві ретінде тіркеледі. Осы массивтің аналитикалық түрін алу үшін берілген фунциялар қатарына жіктеуді қолдану қажет (тәжірибелік мәліметтерді жуықтау ө аппроксимациялау). Функцияны аппрокимациялауын қисықтарды қиыстырып келтіру Curve Fitting Toolbox пакеті көмегімен орындаймыз.
5.3 Қисықтарды қиыстырып келтіру Curve Fitting Toolbox пакеті
Пакетпен жұмысты бастағанда біріншіден мәліметтерді орнату қажет. Мәліметтер жүйенің бұйрық терезесінде сәйкес векторларда орнатылуы мүмкін.
Curve Fitting Tool пакетінің негізгі терезесі MatLab бұйрық терезесінде терілген cftool бұйрығымен ашылады. Басында ол графиктердің бос терезесінен тұрады, оның жоғарғы жағында 4 батырма бар: Data... - мәліметтерді тиеу; Fitting... - қиыстырп келтіруді орындау; Ploting... - қиыстырып келтіруді графикалық көрсету; Analysis... - қиыстырп келтірудің нәтижелерін анализдеу.
Мәліметтерді тиеу. Әдетте Curve Fitting Tool пакетпен жұмыс тиелетін мәліметтердің типін анықтаудан басталады. Ол үшін Data... батырмасын басыңыз. Пайда болған терезеде сәйкес беттер көмегімен мәліметтер типтерін орнатуға, оларды қарап шығуға, жөндеуге және тегістеуге болады. Apply батырмасы басылса, мәліметтер Curve Fitting Tool-дің негізгі терезесіне тиеледі, терезе жабылады. Мәліметтер нүктелері терезенің графика бөлігінде көрсетіледі.
Берілген түрді қиыстырып келтіруін орындау. Fitting/New Fit батырмасын басып қиыстырып келтіру процедурасын бастауға болады.
Ашылатын Type of fit тізімі қиыстырып келтірудің (регрессияның) келесі типтерін орнатуға мүмкіндік береді:
1) Custom equations - пайдаланушы анықтаған регрессия функциясы.
2) Exponential - экспоненттіқ репрессия.
3) Fourier - Фурье қатарымен жуықтау.
4) Gaussian - гауссиан қисығымен жуықтау.
5) interpolant - интерполяцияны таңдалынған әдісімен орындау.
6) Polynomial - полиномдық регрессия.
7) Power - дәрежелік регрессия.
8) Rational - алымы мен бөлімін таңдап рационалды функциямен жуықтау.
9) Smoothing Spline - түзететін сплайндармен жуықтау.
10) Sum of Sin Func - синусоидалды функцялар қосындысымен жуықтау.
11) Weibull - Вейбулл қисығымен жуықтау.
Сонымен бірге MatLab жүйенің функцияларының негізінде пайдаланушы өзі жуықтаудың кез-келген түрін орнатуына болатындығы өте маңызды қасиет.
Қиыстырып келтіру Fitting терезесінің Fit Options...батырмасын басып қиыстырып келтірудің бірсыпыра опцияларын орнатуға болады. Опциялар терезесінде қиыстырып келтірудің әр түрлі алгоритмдерін, туындылардың өзгеру шектерін, функцияның максималды мәнін және регрессия параметрлерінің бастапқы мәндерін орнатуға болады. Осы шамалардың барлығы қиыстырып келтірудің жылдамдылығы мен тиісуіне әсер етеді.
Регрессияны графикалық көрсету. Curve Fitting Tool терезесінің Plotting...батырмасы графиктердің параметрлерін орнату терезесін ашады.
Регрессия жұмысын анализдеу. Жуықтаудың маңызды қадамы - нәтижелерді анализдеу. Талқылау терезесі Analysis... батырмасын басумен ашылады. Терезенің сол жағында анализдеудің бір сыпыра опциялары орнатылған: есептеулерді орындау, регрессия функциясы үшін туындылар мен интегралдардың графиктерін шығару, т.б. Керекті опциялар оларды белгілеумен орнатылады. Содан кейін Apply батырмасы терезенің жоғарғы жағында анализдеудің нәтижелер кестесін орнатады және анализдің нәтижелерін графикалық түрін көрсететін терезені шығарады.
Регрессия қисығын таңдаудың критерийі болып аргументтердің берілген диапазондарындағы Residuals қателіктің минимумы, осы диапазон шектерінде немесе бөлек аймақтарында қателіктердің қолайсыз өсіп кетулерінің жоқтығы, т.б. болады. Берілген нүктелер үшін бірнеше регрессия қисықтарын анализдеген дұрыс.
5.4 Зертханалық жұмысты орындау тәртібі
5.4.1 Идентификациялау процедурасын орындауға «өлшеу стендін» құрыңыз:
- Work/Objects5 папкасынан Simulink ортасына «объекттің» блок-диаграммасын жүктеңіз (нұсқа бойынша);
- кіріс сигналды анықтап (нұсқа бойынша), оны объект кірісіне беріңіз; шығыс сигналды тіркеңіз;
- шығыс сигналдың мәндерін бағдарламаның жұмыс ортасына орнатыңыз; ол үшін сигналды To Workspace блогына беріңіз, осы блок атауына сәйкес айнымалының атын орнатыңыз.
5.4.2 Curve Fitting Tool пакетін жүктеңіз, шығыс сигналдың алынған мәндерін пакет терезесіне көшіріңіз; нүктелердің орналасуына қарай аппроксимациялау полниомның түрін таңдаңыз.
Шығыс сигналдың мәндерін әртүрлі функциялармен жуықтаңыз: әртүрлі ретті полиномдарымен немесе кейбір таңдалынған теңдеулермен.
Өз теңдеуіңізді орнату үшін регрессиялар түрлерінің тізімінен Custom equations жолын таңдаңыз. Create Custom Equations терезесі пайда болады. Бұл терезенің екі беті бар. Бірінші Linear Equations бетінде коэффициенттер бойынша сызықты теңдеудің параметрлері орнатылады. Тәулділіктің өзі сызықты емес болуы мүмкін. Екінші General Equations бетінде регрессияның кез-келген сызықты емес теңдеуін орнатуға болады.
5.4.3 Қиыстыруды аяқтап, шығыс сигналды ең тиімді жуықтайтын функцияны таңдаңыз. Осы функцияның өрнегін жазыңыз (коэффициенттерлерінің есептелген мәндерімен).
5.4.4 Сызықты моделдің құрылымын анықтаңыз (теңдеуді жазыңыз).
5.4.5 Сәйкессіздік функционалының түрін жазыңыз: кіріс функциясы мен оның туындылары орнына кіріс сигнал мен оның туындыларының өрнектерін қойыңыз; шығыс функциясы мен оның туындылары орнына жуықтау барысында алынған өрнек пен оның сәйкес туындыларын қойыңыз.
5.4.5 Сәйкессіздік функционалдың барлық айнымалылары бойынша туындыларын нолге теңестіріп, моделдің коэффициенттерін анықтауға теңдеулер жүйесін алыңыз; алынған жүйені сызықты алгебралық теңдеулер жүйесінің стандартты түріне түрлендіріңіз.
5.4.6 Алынған сызықты алгебралық теңдеулер жүйесін Matlab ортаның процедурасы көмегімен шешіңіз (бұйрық терезеде): стандартты түрдегі
![]()
жүйе үшін шешім келесідей табылады
![]()
Мұндағы
А – сызықты алгебралық теңдеулер жүйесінің коэффициенттерінің матрицасы;
b – жүйенің оң жақтағы векторы;
x – белгісіздер векторы (моделдің белгісіз параметрлері).
Алдын‑ала А (матрица)
және b (тік
жол векторы) массивтерін ортаның бұйрық терезесіне енгізу
керек, сонымен бірге жүйенің шешім бар болатын ![]() шартын тексері керек.
шартын тексері керек.
5.4.7 Параметрлердің табылған мәндерін қолданып, динамикалық моделдің ізделінген теңдеуін жазыңыз.
5.4.8 5.4.1 тарауында іске асырылған диаграммаға моделдің блогын қосыңыз; оның кірісінеде орнатылған кіріс сигналды беріңіз; объект пен моделдің шысыстарын бір терезеге шығарыңыз. Нәтижелерін салыстырыңыз.
5.4.9 Жұмыс бойынша қорытынды жасаңыз.
5.5 Есеп беру құрамы
Зертханалық жұмыс бойынша есеп беру келесіден тұрады:
- зертханалық жұмыстың мақсаты мен тапсырмасы;
- «өлшеу стендтің» блок-диаграммасы;
- Matlab жүйенің жұмыс ортасына орнатылған объекттегі тәжірибелер нәтижелері;
- шығыс сигналды жуықтау процедурасының орындау реті; таңдалынған аппроксимациялау полиномы;
- сәйкессіздік функционалдың түрі;
- осы функционалды минимумдау шарты;
- модел параметрлерін анықтауға құрылған теңдеулер жүйесі; осы жүйені шешу жолы;
- моделдің алынған теңдеуі;
- объект пен моделдің шығыстарының салыстыру графиктері;
- жұмыс бойынша қорытынды.
5.6 Тапсырма нұсқалары
5.6.1 «Объекттер» нұсқалары Simulink пакетінің Work/Objects5 папкасынан таңдалынады.
5.6.2 Модельдің құрылымдық параметрлері мен кіріс сигналдары 2 кестеден таңдалынады.
5.7 Бақылау сұрақтары
5.7.1 Параметрлік идентификация деген не?
5.7.2 Параметрдің бағасы дегенді қалай түсінесіз?
5.7.3 Моделдің параметрлерін бағалау үшін қандай критерий қолданылады?
5.7.4 Simulink ортасында пайда болған шығыс сигналдың мәндерін Matlab жүйенің жұмыс ортасына қалай орнатуға болады?
5.7.5 Функцияларды аппроксимациялаудың анықтамасын беріңіз.
5.7.6 Функцияларды аппроксимациялауға қандай критерий
қолданылады?
5.7.7 Функцияларды аппроксимациялауға қандай пакет қолданылды?
5.7.8 Сәйкессіздік функционалы деген не?
5.7.9 Сәйкессіздік функционалын минимумдау есебі қалай шешіледі?
5.7.10 Объект пен модел шығыстарының айырмашылығы немен байланысты?
2 кесте
|
Нұсқа № |
Кіріс сигналдың өрнегі |
Моделдің құрылымдық параметрлері |
|
1 |
x(t) = t+1 |
p=1, l=0 |
|
2 |
x(t) = 3t+2 |
p=2, l=1 |
|
3 |
x(t) = t2+t+1 |
p=3, l=1 |
|
4 |
x(t) = t-7 |
p=2 ,l=1 |
|
5 |
x(t) = 2t2-6 |
p=3, l=2 |
|
6 |
x(t) =t |
p=2, l=1 |
|
7 |
x(t) =2t+4 |
p=1, l=0 |
|
8 |
x(t) = t2-t+5 |
p=3, l=1 |
|
9 |
x(t) =4t+3 |
p=2 ,l=1 |
|
10 |
x(t) = t2+2 |
p=3, l=2 |
6 Зертханалық жұмыс №6. Сызықты объекттерді System Identification Toolbox пакетінің құралдарымен идентификациялау
Жұмыс мақсаты: MatLab жүйенің идентификациялаудың графикалық құралының көмегімен жүйелерді идентификациялау әдістерін үйрену.
6.1 Зертханалық жұмысқа тапсырма
Зертханалық жұмысты жасау барысында студент келесі тапсырмаларды орындау керек:
- сызықты динамикалық объекттерді параметрлік идентификациялау әдістерімен танысу [1,2,3];
- объектте тәжірибелерді орындау;
- тәжірибелер нәтижелерін алдын-ала өңдеуін орындау;
- корреляциялық моделді идентификациялауын орындау;
- объекттің жиілік сипаттамаларын бағалау;
- параметрлік модел үшін құрылымын таңдау; тәжірибелер нәтижелері мен таңдалынған құрылымды қолданып, модел параметрлерін анықтау;
- құрылған моделдерінің дәлдігін бағалау.
6.2 System Identification Toolbox графикалық құралы
Matlab жүйенің System Identification Toolbox пакеті құрамында сызықты динамикалық объекттердің бақыланатын кіріс және шығыс сигналдары негізінде математикалық моделдерін жасауға бірсыпыра құралдары бар. Зертханалық жұмыста сызықты жүйені идентификациялау үшін осы құралдар құрамына кіретін ident графикалық интерактивті интерфейс қолданылады.
Идентификациялаудың графикалық бағдарламасын жүктеу үшін бұйрық терезеде ident мәтінін теріңіз. Нәтижесінде экранда ident бағдарламасының панелі (негізгі терезесі) пайда болады.
Идентификациялаудың графикалық программасын жүктеу үшін бұйрық терезеде ident бұйрығын теру керек. Нәтижесінде экранда бағдарламаның панелі (негізгі терезесі) пайда болады.
Объектті идентификациялау келесі тәртіппен орындалады:
- тәжірибелердің мәліметтерін тиеу үшін ашылатын Data-Import… менюын таңдаңыз; пайда болған диалогты терезеде моделдің кірудегі және шығудағы айнымалыларының аттарын еңгізіңіз; сонымен бірге уақыт интервалы, комментарий мәтінің еңгізуге болады. Содан кейін Import батырмасын басыңыз, мәліметтер графикалық қабатта көрсетіледі. Мәліметтерді көшіру терезесін жабыңыз. Мәліметтер Working Data және Validation Data өрістерінде де пайда болғанына зер салыңыз.
- Time Plot жалауы кіріс пен шығыстың графиктерінің терезесін көрсетуге мүмкіндік береді. Бұл терезеде басқару меню бар. График фрагментін үлкейту үшін тінтуірмен төртбұрышты аймақты графикте белгілейміз, мышканың сол жақтағы батырмасымен масштабты өзгертуге болады, батырмаға екі рет басып бастапқы масштабқа келеміз. Графиктер терезесін тазарту үшін мәліметтер қабатына мышкамен басамыз. Жаңа мәліметтермен жұмыс істеу үшін оларды Working Data аймағына тінтуірмен тасымалдау қажет.
Мәліметтер қабатына мышкамен екі рет басып тағы бір терезені ашамыз, бұнда мәліметтер массивінің атын өзгертуге болады;
- Preprocess менюдың Select Range бұйрығы мәліметтерден бір кесіндісін таңдауға мүмкіндік береді. Бұл әрекетті пайда болған терезенің мәтіндік өрістері немесе сигналдар графигінде тінтуірмен төртбұрышты аймақты белгілеу арқылы орындауға болады. Insert батырмасын басып, таңдалынған мәліметтерді басқа терезеде орнатамыз. Моделді верификациялау (дәлелдеу) үшін әдетте параметрлерді идентификациялауға қолданбаған мәліметтерді пайдаланамыз. Сигналдар мәндерінің бастапқы массивтерін екіге бөлуге болады: біреуі идентификациялауға, екіншісі – верификация процедурасына қолданылады. Әдетте, әсіресе нақты күрделі объекттер үшін, верификациялауға әртүрлі мәліметтердің бірнеше жиындары қолданылады.
Идентификацияны өткізу үшін таңдалынған мәліметтер Working Data аймағына, ал верификацияны өткізу үшін сәйкес мәліметтер Validation Data аймағына тасымалданады (мышка көмегімен);
- таңдалынған типті моделді бағалау үшін Estimate ашылатын менюден сәйкес жол таңдалынады; пайда болған (таңдалынған модел типіне сәйкес) диалогты терезелерде модел бағасын табуға қажетті параметрлерді орнату керек;
- алдынғы тараудағы операцияларды жасағанда интерфейстің негізгі бетінде (оның оң жағында – Model Views) модел аттары орнатылған белгілер пайда болады;
- құрылған модел объектті қандай дәлдікпен бейнелейтінін анықтау үшін оның жүріс-тұрысын анализдеу керек. Моделді верификациялауға ident бағдарламасының көп мүмкіндіктері бар. Бұл процедуралар панелдің оң жақ бұрышында орнатылған терезелерде қажетті жалауларды орнату жолымен орындалады.
Бақыланатын және моделденетін шығудағы сигналдарын салыстыру үшін «Model output» жалауын белгілеңіз. Ашылған терезеде өлшенген (қара бояумен) және модел бойынша есептелген шығудағы сигналдардың графиктері көрсетілген. Кейбір фрагменттерін қарап шығу үшін мышканың сол жақтағы батырмасын басып отырып, графикте төртбұрышты аймақты белгілеңіз, осы аймақ барлық терезеде көрсетіледі.
6.3 Зертханалық жұмысты орындаудың тәртібі
6.3.1 Идентификациялау процедурасын орындауға «өлшеу стендті» іске асырыңыз:
- Work/Objects6 папкасынан Simulink ортасына «объекттің» блок-диаграммасын жүктеңіз (нұсқа бойынша);
- объект кірісіне сатылы x=a (a мәні еркін таңдалынады) сигналды беріңіз беріңіз; шығыс сигналдарды тіркеңіз;
- тәжірибелер нәтижелерін яғни шығыс сигналдардың өлшенген мәндерін бағдарламаның жұмыс ортасына орнатыңыз; ол үшін сигналды To Workspace блогына беріңіз, блок атауына сәйкес айнымалының атын орнатыңыз.
6.3.2 Идентификациялау процедурасын бастау үшін бұйрық терезеде ident бұйрығын теріңіз. Интерфейстің диалогты терезесі пайда болады.
6.3.3 Жұмыс ортадан тәжірибе мәліметтерін жүктеңіз:
- ашылатын тізімнен Data-Import бұйрығн таңдаңыз;
- пайда болған терезеде кіріс және шығыс сигналдарының аттарын енгізіңіз, бастапқы уақыт - 0, дискреттеу интервалы – 0.08 деп орнатыңыз; Import батырмасын басыңыз, мәліметтерді импорттау терезесін жабыңыз;
- Time Plot жалауын орнатып, бастапқы мәліметтерді зерттеңіз.
6.3.4 Тұрақты құрамдасушын жойып зерттелетін объекттің сигналдарын алдын-ала өңдеңіз:
- Preprocess-Remove Means; Data Views өрісінде жаңа мәліметтер туралы ақпарат пайда болады;
- қайтадан Time Plot терезесіне көшіп, тұрақты құрамдасушылары жойылған сигналдарды қарап шығыңыз;
- Preprocess-Select Range таңдаңыз, пайда болған терезеде мәліметтер диапазонын орнатыңыз; жаңа мәліметтер интерфейс терезесінде көрсетіледі;
- осы жаңа ақпаратты Working Data өрісіне тасымалдаңыз.
6.3.5 Моделді тексеру үшін мәліметтерді орнату диапазонды таңдау операцияны қайталаңыз (мысалы, бастапқы диапазонның қалған бөлігінен), осы мәліметтерде интерфейс терезесінде көрсетіледі; оларды мышкамен Validation Data өрісіне тасымалдаңыз.
6.3.6 Корреляциялық моделді бағалаңыз:
- ашылатын Estimate тізімінен Correlation Model жолын таңдаңыз;
- пайда болған терезеде фильтрдің мәліметтерін орнатуға болады (біздер ештеңені өзгертпейміз), Estimate батырмасын басыңыз;
- интерфейстің Model Views терезесінде imp белгісі пайда болады, яғни таңдалынған модел құрылды;
- Transient Response жалауын орнатыңыз, бөлек терезеде корреляциялық әдісімен табылған өтпелі процестің графигі пайда болады;
- Optoins менюды қолданып өтпелі процестің графигінің орнына импульсты өтпелі прооцестің графигін шығаруға болады;
6.3.7 Объекттің жиілік сипаттамаларын бағалаңыз:
- Estimate-Spectral Model таңдаңыз;
- алдыңғы тарамдағы әрекеттерді қайталаңыз;
- интерфейстің Model Views терезесінде spad белгісі пайда болады, ол спектрлік әдісімен табылған жиілік сипаттамалар түріндегі модел;
- Frequency Response жалауды орнатып, нәтижені көрсетіңіз.
6.3.8 Параметрлік моделді бағалаңыз:
- Estimate-Parametric mode таңдаңыз. Моделдің
құрылымын орнату терезесі пайда болады (Structure
өрісінде); келісім бойынша параметрлері na = 4, nb = 4, nk
= 1 тең ARX типті модел ұсынылады (ашылатын тізімнен басқа
моделді таңдауға болады). na және nb параметрлер
модел теңдеуінің оң жағымен сол жағының
реттерін белгілейді. nk параметрі объектте шамасы ![]() тең кешугідің бар болатынын
белгілейді. Параметрлерін өзгерту үшін модел ретін жөндеу
терезесінде (Order Editor батырмасы), константалар мәндері
орнатылады;
тең кешугідің бар болатынын
белгілейді. Параметрлерін өзгерту үшін модел ретін жөндеу
терезесінде (Order Editor батырмасы), константалар мәндері
орнатылады;
- моделдің ұсынылған параметрлері орнатыңыз, Estimate батырмасын басыңыз. Нәтижесінде arx441 аты бар модел белгісі пайда болады;
- параметрлі моделді бағалау әрекеттерін
параметрлері na = 2, nb = 2, nk =3. nk=3 (![]() кешігуді белгілейді) болатын ARX-моделге
қайталаңыз. Моделдің тағы бір arx223 белгісі
пайда болады.
кешігуді белгілейді) болатын ARX-моделге
қайталаңыз. Моделдің тағы бір arx223 белгісі
пайда болады.
6.3.9 Құрылған моделдерді салыстыру үшін Transient Response жалауын орнатыңыз, мұнда үш құрылған моделдерге сәйкес өтпелі процестердің графиктері көрсетіледі.
6.3.10 Параметрлік моделдерді Model output жалауын орнатып, салыстырамыз.
6.3.11 Моделдер параметрлерінің бағаларын Matlab ортаның бұйрық терезесінде орнату үшін, модел пиктограммасына тінтуірдің оң жақ батырмасымен екі рет басып, пайда болған терезеде «Present» батырмасын басамыз.
6.4 Есеп беру құрамы
Зертханалық жұмыс бойынша есеп беру келесіден тұрады:
- зертханалық жұмыстың мақсаты мен тапсырмасы;
- «өлшеу стендтің» блок-диаграммасы;
- Matlab жүйенің жұмыс ортасына орнатылған объектте өткізілген тәжірибелер нәтижелері;
- мәліметтерді жүктеу, өңдеу, идентификациялау өрісінде орнату және верификациялау қадамдарын көрсететін ident интерфейстің терезелері;
- объектті корреляциялық әдісімен идентификациялау нәтижесі;
- объектті спектрлік әдісімен идентификациялау нәтижесі;
- жасалған моделдердің салыстырмалы графиктері;
- объектті әртүрлі реттері бар параметрлік моделдерімен идентификациялау нәтижесі;
- параметрлік моделдердің салыстырмалы графиктері;
- Matlab ортасының бұйрық терезесінде орнатылған моделдер параметрлерінің бағалары;
- жұмыс бойынша қорытынды.
6.5 Тапсырма нұсқалары
Нұсқалар Simulink пакетінің Work/Objects6 папкасынан таңдалынады.
6.6 Бақылау сұрақтары
6.6.1 Идентификация деген не?
6.6.2 System Identification Toolbox пакеті көмегімен қандай объекттердің моделдерін бағалауға болады?
6.6.3 ident графикалық ортаның міндеті.
6.6.4 Matlab жүйенің әртүрлі пакеттері арасында мәліметтермен алмасуға Simulink пакетінің қандай блогы қолданылады?
6.6.5 Тәжірибе нәтижелері идентификациялаудың графикалық интерфейсіне қалай жүктеледі?
6.6.6 Тәжірибе нәтижелерін не үшін алдын-ала өңдейміз?
6.6.7 Интерфейс терезіснде өтпелі процестің графигін қалай алуға болады:
6.6.8 Әртүрлі құрылымы бар параметрлік моделдерді қалай салыстыруға болады:
6.6.9 Моделді верификациялау дегенді қалай түсінесіз?
6.6.10 ident пакетінде қалпына келтірілген моделдің дәлдігін қалай бағалауға болады?
7 Зертханалық жұмыс №7. Динамикалық объекттерді параметрлі емес идентификациялау
Жұмыс мақсаты: жүйелерді параметрлі емес идентификациялау әдістерін үйрену және MatLab жүйесінің қисықтарды жуықтау Curve Fitting Toolbox пакетінде жұмыс істеу дағдыларын алу.
7.1 Зертханалық жұмысқа тапсырма
Зертханалық жұмысты жасау барысында студент келесі тапсырмаларды орындау керек:
- параметрлі емес идентификациялау және функцияларды аппроксимациялау әдістерін оқу [1,2,3];
- Curve Fitting Toolbox пакетінде жұмыс істеу амалдарын үйрену;
- объектті параметрлі емес идентификациялау үшін объект моделінің теңдеулерін құрастыру;
- объекттің импульсті өтпелі функциясының дискретті мәндерін анықтау үшін параметрлі емес идентификациялау процедурасын орындау;
- Curve Fitting Toolbox пакетін қолданып параметрлі емес идентификациялау есебінің тегістелген шешімдерін анықтау.
7.2 Объектті параметрлі емес идентификациялау үшін корреляция-лық функцияларды қолдану
Қарапайым жағдайда параметрлі емес идентификациялау деп модел операторындағы кейбір функцияларды анықтау процесін түсінеміз. Сызықты динамикалық объекттің спецификасы оның бірлік импульсты функцияға реакциясымен анықталады. Сондықтан параметрлі емес модел импульсты (салмақты) өтпелі функциямен анықталады.
Объект кірісіне арнайы түрдегі жасанды әсерлерді беріп, жүйе реакциясын өлшеп, осы бақылаулар нәтижесін қолдану жолымен зерттелетін объекттің динамикалық сипаттамаларын анықтаудың әдістерін көп жағдайларда қолдану мүмкін болмайды. Статистикалық түсініктемелерде негізделген әдісті қарастырамыз.
Статистикалық әдісте ақпарат көзі ретінде идентификацияланатын объекттің өзінің табиғи кездейсоқ сигналдарын қолданады. Кездейсоқ сигналдарының жиілік спектр қажетті болатынының ықтималдағы өте төмен, сондықтан кездейсоқ сигналдармен бірге кейбір қателіктер пайда болуы мүмкін. Осы себептен идентификациялаудың статистикалық әдістерінде корреляциялық және спектрлік функциялар кең қолданылады.
Сызықты стационарлы динамикалық объектті статистикалық әдістерімен идентификациялағанда салмақты функция Винер-Хопф теңдеуінен анықталады
 .
(7.1)
.
(7.1)
Оны шешудің әдісінің бірі – сандық әдіс. Осы теңдеуді сызықты алгебралық теңдеулер жүйесімен көрсетуге болатындығы сандық әдістің мағынасы болады. Ол үшін интегралды шекті суммамен көрсетеміз
 ,
,
мұнда ∆ - дискреттеу интервалы;
n∆ - дискретті уақыт;
N –интервалдар саны.
Бұл теңдеу τ = ∆, …, N∆ мәндерінде ақиқат.
Осы теңдеуге τ-дың N мәндерін қойып, N теңдеулерден тұратын жүйені аламыз. Бұл жүйені уақыттың дискретті ∆, …, N∆ моментенттеріндегі импульсты өтпелі функцияның мәндерін табуға қолданамыз.
Сонымен, келесі теңдеулер жүйесін аламыз
Ag = b, (7.2)
мұнда А – квадратты матрица;
b = [b1, b2,…,bm]T - вектор, оның компоненттері bi=Ryx(τ)/∆, i = 1,...,m;
g = [g1, g2,…,gm]T – импульсты өтпелі функцияның ізделінетін мәндерінің векторы.
Осы жүйені шешу жолымен g(τ) салмақты функцияның t, 2t,…, mt нүктелердегі ординаттарының дискретті мәндерін табамыз. Корреляциялық функциялардың орнына олардың бағалары қолданғандықтан және жүйенің детерминанты нөлге жақын болғандықтан бұл шешімдердің қателіктері өте жоғары. Алынған импульсты өтпелі функциялардың мәндерінің орта квадрат қателіктері минимумға жақын болғанымен бұл функциялар объекттегі процестердің физикалық мағналарына сәйкес болмағандықтан олардың сапасы төмен. Шешімдердің тегістелген мәндерінің физикалық мағнасы бар. Сондықтан импульсты өтпелі функцияны тегістеудің әртүрлі процедуралары қолданылады.
7.3 Дискретті импульсті өтпелі функцияны аппроксимациялау
Тегістелген импульсті өтпелі функцияларды табу үшін осы функцияның мәндерін кейбір аппроксимациялау полиноммен жуықтау процедурасы қолданылады. Көбінесе ортогоналды полиномдар жүйесімен жіктеу қолданылады
мұнда φk(t) – берілген функциялар жүйесі;
N – жіктеу реті;
ak – төмендегі формуламен есептелінетін қатар коэффициенттері
 .
.
Жіктеу функцияларын таңдағанда олардың аз санында жақсы жуықтауға жету мақсатын орындауға тырысады. Лаплас түрлендіруі бойынша түрлендірілетін ортогоналды функцияларды қолдану жөн (Чебышев, Лагерр, Лежандр полиномдары).
7.4 Зертханалық жұмысты орындау тәртібі
7.4.1 Уақыттың белгілі интервалында зерттелетін объекттің кірудегі және шығудағы айнымалылары тіркелген. Осы өлшеулер нәтижелері негізінде автокорреляциялық және өзара корреляциялық функциялар есепетелген (нұсқалар кестесін қараңыз).
7.4.2 Өз вариантыңыз үшін (7.2) сызықты алгебралық теңдеулер жүйесін жазыңыз.
7.4.3 MatLab жүйенің бұйрық терезесін қолданып (7.2) жүйенің шешімін табыңыз (№6 зертханалық жұмыстың 6.4.6 тарауындағыдай).
7.4.4 Curve Fitting Tool пакеті көмегімен алынған дискретті мәндерді әр түрлі ретті ортогоналды полиномдарымен жуықтаңыз полиномами (жұп нұсқалар үшін Лагерр полиномдары қолданылады, тақ нұсқаларға - Лежандр полиномыдары).
7.4.5 Импульсті өтпелі функцияны тиімді аппроксимациялайтын полиниомды таңдаңыз.
7.4.6 Алынған импульсті өтпелі функцияны қолданып парметрлі емес моделді жазыңыз
 .
.
7.4.7 Модел теңдеуі бойынша блок-диаграмманы құрыңыз.
7.4.8 Модел кірісіне әртүрлі сигналдарды беріп, тәжірибелерді өткізіңіз; шығыс сигналдарын Scope терезесіне шығарыңыз.
7.5 Есеп беру құрамы
Зертханалық жұмыс бойынша есеп беру келесілерден тұрады:
- зертханалық жұмыстың мақсаты мен тапсырмасы;
- импульсты өтпелі функцияның дискретті мәндерін анықтауға негізделген алгебралық теңдеулер жүйесі;
- осы жүйенің шешімдер массиві;
- импульсты өтпелі функцияның дискретті мәндерін аппроксимациялауды орындаудың қадамдары;
- импульсты өтпелі функцияны аппроксимациялайтын өрнектері;
- тиімді аппроксимациялау полномын дәлелдеп таңдау;
- параметрлі емес моделдің блок-диаграммасы;
- моделдің шығу сигналының графигі.
7.6 Тапсырмалар нұсқалары
|
Нұсқа № |
t, мин |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
∞ |
|
1 |
Rx(t) |
1 |
0,37 |
0,16 |
0,05 |
0,02 |
0,01 |
0,005 |
0 |
|
Rxy(t) |
0,1788 |
0,4729 |
0,3866 |
0,2565 |
0,1454 |
0,06 |
0,03 |
0 |
|
|
2 |
Rx(t) |
1 |
0,47 |
0,2 |
0,1 |
0,05 |
0,01 |
0,005 |
0 |
|
Rxy(t) |
0,2376 |
0,5128 |
0,1343 |
0,2848 |
0,155 |
0,003 |
0,003 |
0 |
|
|
3 |
Rx(t) |
1 |
0,53 |
0,26 |
0,15 |
0,1 |
0,02 |
0,003 |
0 |
|
Rxy(t) |
0.3049 |
0.5792 |
0.5575 |
0.4152 |
0.2176 |
0,002 |
0,002 |
0 |
|
|
4 |
Rx(t) |
1 |
0,5 |
0,3 |
0,2 |
0,09 |
0,03 |
0,003 |
0 |
|
Rxy(t) |
0.3978 |
0.7428 |
0.7030 |
0.5960 |
0.3200 |
0,001 |
0,001 |
0 |
|
|
5 |
Rx(t) |
1 |
0,52 |
0,28 |
0,18 |
0,1 |
0,02 |
0,005 |
0 |
|
Rxy(t) |
0.4872 |
0.9122 |
0.8998 |
0.7320 |
0.4088 |
0,002 |
0,002 |
0 |
|
|
6 |
Rx(t) |
1 |
0,46 |
0,22 |
0,12 |
0,1 |
0,03 |
0,004 |
0 |
|
Rxy(t) |
0.3825 |
0.8008 |
0.7846 |
0.6214 |
0.3794 |
0,001 |
0,002 |
0 |
|
|
7 |
Rx(t) |
1 |
0,38 |
0,19 |
0,04 |
0,02 |
0,01 |
0,005 |
0 |
|
Rxy(t) |
0.1735 |
0.4398 |
0.3637 |
0.2415 |
0.1026 |
0,003 |
0,002 |
0 |
|
|
8 |
Rx(t) |
1 |
0,45 |
0,2 |
0,1 |
0,05 |
0,01 |
0,004 |
0 |
|
Rxy(t) |
0.2531 |
0.5655 |
0.5020 |
0.3365 |
0.1445 |
0,003 |
0,002 |
0 |
|
|
9 |
Rx(t) |
1 |
0,39 |
0,19 |
0,06 |
0,01 |
0,001 |
0,0001 |
0 |
|
Rxy(t) |
0.2428 |
0.6008 |
0.5659 |
0.4181 |
0.1166 |
0,0005 |
0,003 |
0 |
|
|
10 |
Rx(t) |
1 |
0,35 |
0,18 |
0,05 |
0,02 |
0,01 |
0,005 |
0 |
|
Rxy(t) |
0.2495 |
0.6569 |
0.5835 |
0.3389 |
0.1058 |
0,002 |
0,003 |
0 |
7.7 Бақылау сұрақтары
7.7.1 Параметрлі емес идентификациялау деген не?
7.7.2 Импульсты өтпелі функцияның анықтамасы.
7.7.3 Автокорреляциялық және өзара корреляциялық функциялардың анықтамасын беріңіз.
7.7.4 Параметрлі емес идентификациялауда корреляциялық функциялар қандай мақсатымен қолданылады?
7.7.5 Винер-Хопф теңдеуі қандай объекттерді бейнелейді?
7.7.6 Винер-Хопф теңдеуі алгебралық теңдеулер жүйесіне қалай түрленеді?
7.7.7 Ортогоналды полиномның анықтамасын беріңіз.
7.7.8 Ортогоналды полиномдарды аппроксимациялауға қолданудың артықшылықтары?
7.7.9 Curve Fitting Tool пакетінің міндеті?
7.7.10 Функциялардың қайсысы жуықтаудың ең тиімдісі болды?
Әдебиеттер тізімі
1. Ибраева Л.К., Хисаров Б.Д. Басқару объекттерді моделдеу және идентификациялау. Оқу құралы. – Алматы: АЭжБИ, 2009 - 207 б.
2. Ибраева Л.К. Басқару объекттерді моделдеу және идентификациялау. 050702 – Автоматтандыру және басқару мамандығы бойынша барлық оқу түрінің студенттеріне арналған дәрістер жинағы. – Алматы: АЭжБИ, 2009. – 84 б.
3. Ибраева Л.К., Хисаров Б.Д. Моделирование и идентификация объектов управления. Учебное пособие. – Алматы: АИЭС, 2009 – 209 с.
4. Ибраева Л.К. Моделирование и идентификация объектов управления. Конспект лекций для студентов всех форм обучения специальности 5В0702 – Автоматизация и управление. - Алматы:АИЭС, 2009 – 84 с.
5 Сыздыков Д.Ж. Идентификация в системах управления. – Алматы: Изд-во «Эверо», 2007.
6 MATLAB 6.5 SP1/7.06 Simulink 5/6 в математике и моделировании. – М7: СОЛОН-Пресс, 2005.
2014 ж. жалпы жоспары, реті 110
Лида Куандыковна Ибраева
БАСҚАРУ ОБЪЕКТТЕРДІ МОДЕЛДЕУ
ЖӘНЕ ИДЕНТИФИКАЦИЯЛАУ
5В070200 – Автоматтандыру және басқару
мамандығының студенттері үшін
зертханалық жұмыстарды орындау бойынша
әдістемелік нұсқаулықтар
Редакторы Б.С.Қасымжанова
Стандарттау бойынша
маман Н.Қ.Молдабекова
__. __. __.
басуға қол қойылды
Пішімі 60х84 1/ 16
Таралымы 100 дана.
№1
типографиялық қағаз
Көлемі 2,4
оқу-бас. ә.
Тапсырыс ___
Бағасы 1200 т .
«Алматы энергетика және байланыс университеті»
Коммерциялық емес акционерлік
қоғамының
көшірмелі-көбейткіш бюросы
050013, Алматы, Байтұрсынұлы көшесі,
126