Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра инженерной кибернетики
НАЛАДКА СИСТЕМ АВТОМАТИЗАЦИИ
Методические указания к выполнению расчетно-графических работ
для магистрантов специальности 6М070200 –
Автоматизация и управление
Алматы 2012
СОСТАВИТЕЛЬ: Б. А.Чернов. Наладка систем автоматизации. Методи-ческие указания к выполнению расчетно-графических работ для магис-трантов специальности 6М070200 – Автоматизация и управление. – Алматы: АУЭС, 2012. – 12 с.
Методические указания содержат задания и рекомендации к выполне-нию трех расчетно-графических работ по пассивным и активным корректиру-ющим средствам, а также по функциональным устройствам промышленной автоматики на основе операционных усилителей.
Методические указания используются при выполнении расчетно-графических работ по дисциплине «Наладка систем автоматизации».
Ил. 4, библиогр. – 26 назв.
Рецензент: канд. техн. наук, доцент Н.В. Сябина
Печатается по плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2012г.
Ó НАО «Алматинский университет энергетики и связи», 2012 г.
1 Общие указания
Расчетно-графические работы (РГР) являются важным компонентом при изучении курса «Наладка систем автоматизации». В соответствии с рабо-чей программой магистрант выполняет три РГР.
РГР излагаются и оформляются в соответствии с требованиями фирмен-ного стандарта [1] Алматинского университета энергетики и связи на бумаге формата А4 (210х297) и должны включать в указанной последовательности титульный лист, задание, содержание, разделы основной части, выводы и спи-сок литературы. При выполнении РГР выбирается вариант задания, определя-емый номером зачетной книжки магистранта, поэтому этот номер должен быть указан на титульном листе пояснительной записки.
Основную часть РГР при необходимости разделяют на разделы, подраз-делы, пункты и подпункты. Разделы должны иметь порядковые номера, обоз-наченные арабскими цифрами и записанные с абзацного отступа. Подразделы нумеруются в пределах каждого раздела. Разделы и подразделы должны иметь краткие содержательные заголовки, выделенные полужирным шрифтом. Раз-дел и подраздел начинают с нового листа, если на предыдущем листе входит менее трех строк данного текста.
Раздел «Содержание» включает номера и заголовки разделов и подраз-делов с указанием номеров страниц. При малом количестве заголовков содер-жание помещают в конце РГР на одной странице со списком литературы.
В разделе «Список литературы» приводятся только использованные при выполнении РГР источники в порядке появления ссылок на них. При ссылке в тексте на источники следует указывать порядковый номер по этому списку, заключенный в квадратные скобки.
2 Расчетно-графическая работа № 1. Пассивные корректирующие средства
Цель работы: получение навыков использования пассивных RC-уст-ройств для улучшения качества процесса управления в налаживаемых систе-мах автоматического управления (САУ).
2.1 Задание
Между регулятором (Р) и исполнительным устройством (ИУ), выходное и входное сопротивления которых равны соответственно RИ и RН (см. рисунок 1), включено последовательное пассивное корректирующее средство (КС). Пронумерованные электрические схемы комплексных элементов Z1 и Z2 этого КС приведены на рисунке 2.
Вариант задания определяется двумя последними цифрами номера за-четной книжки: по последней цифре Х выбирается схема элемента Z1 (номер
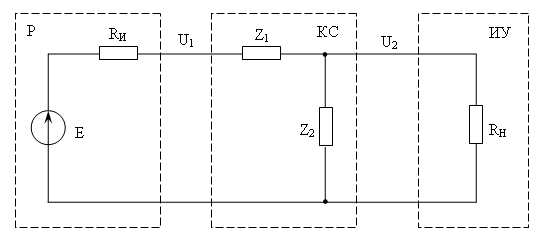
Рисунок 1 – Схема включения пассивного КС
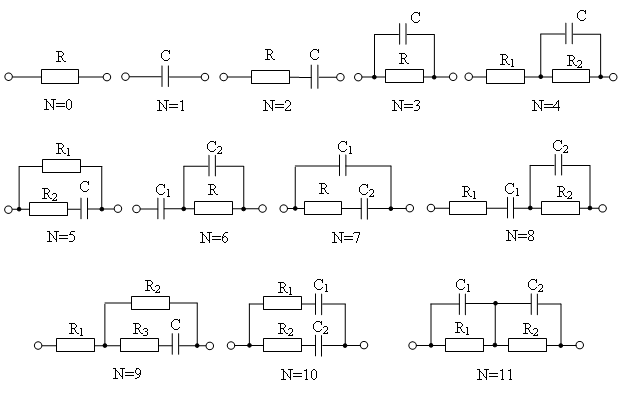
Рисунок 2 – Схемы пассивных цепей и их номера N
этой схемы N = Х), а по предпоследней цифре Y выбирается схема элемента Z2 (номер этой схемы N = Y). Требуется:
- получить передаточную функцию КС для трех случаев: с
учетом RИ и RН , при RИ = 0, при
RН = ![]() ;
;
- построить асимптотические логарифмические амплитудно-частотную (ЛАЧХ) и фазочастотную (ЛФЧХ) характеристики КС для указанных случаев;
- аналитически обосновать вид переходного процесса выходного сигна-ла U2 при ступенчатом изменении входного сигнала Е, приближенно постро-ить графики переходной характеристики h(t) КС для трех указанных случаев;
- проанализировать влияние RИ и RН на логарифмические частотные характеристики (ЛЧХ) и h(t) КС.
2.2 Методика выполнения
2.2.1 Приступая к решению РГР, необходимо ознакомиться с устройст-вом и принципом действия последовательных пассивных корректирующих средств по источникам [2-7], а также составить принципиальную электричес-кую схему заданного КС.
2.2.2 Искомые передаточные функции КС (на рисунке 1) следуют из выражений [2]
W(p) = U2(р) / E(p) = RН║ Z2(р) / [RИ + Z1+ RН║ Z2(р)]; (1)
RН║ Z2(р) = RН Z2(р / [RН + Z2(р)], (2)
в которые подставляются предварительно найденные значения комплексных сопротивлений Z1(р) и Z2(р) заданных RC- цепей.
2.2.3 Наиболее просто искомые ЛЧХ получаются, если передаточную функцию КС представить в виде произведения передаточных функций типо-вых динамических звеньев [2, 8].
2.2.4 Для расчета и построения переходной характеристики h(t) КС це-лесообразно полученную в п.2.2.3 его передаточную функцию высокого по-рядка свести к тождественной сумме передаточных функций типовых динами-ческих звеньев, включенных параллельно. Это можно выполнить с помощью хорошо известных из математики приемов разложения рациональной дроби на простейшие [9-12], в частности, метода неопределенных коэффициентов [13; 14, с. 23]. Тогда h(t) получается как сумма реакций параллельных ветвей тождественного КС на единичное воздействие.
2.2.5 Расчетная и графическая части задания выполняются в алгебраи-ческом виде без применения численных значений сопротивлений резисторов и емкостей конденсаторов КС. Если некоторые соотношения между постоянны-ми времени звеньев КС проведенными расчетами не регламентируются, то для определенности построения ЛЧХ и h(t) эти соотношения принимаются магистрантом самостоятельно.
3 Расчетно-графическая работа № 2. Активные корректирующие средства
Цель работы: получение навыков использования линейных устройств, выполненных на операционных усилителях (ОУ) и RC-элементах, для улуч-шения качества процесса управления в налаживаемых САУ, усвоение досто-инств этих устройств по сравнению с пассивными средствами коррекции.
3.1 Задание
Между регулятором (Р) и исполнительным устройством (ИУ), выходное и входное сопротивления которых равны соответственно RИ и RН (см. рисунок 3), включено последовательное активное корректирующее средство (КС), вы-полненное на одном ОУ с инвертирущим входом. Пронумерованные электри-ческие схемы комплексных элементов ZВХ и Z0 этого КС приведены на рисунке 2.
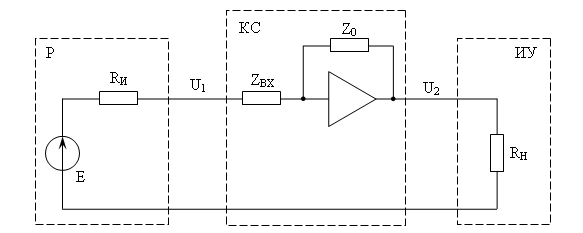
Рисунок 3 – Схема включения активного КС
Вариант задания определяется двумя последними цифрами номера за-четной книжки: по последней цифре Х выбирается схема элемента ZВХ (номер этой схемы N = Х+2), а по предпоследней цифре Y выбирается схема элемента Z0 (номер этой схемы N = Y+2). Требуется:
- получить передаточную функцию КС при RИ ![]() 0
и при RИ = 0;
0
и при RИ = 0;
- построить асимптотические ЛАЧХ и ЛФЧХ КС для этих случаев;
- аналитически обосновать вид переходного процесса выходного сигна-ла U2 при ступенчатом изменении входного сигнала Е, приближенно постро-ить графики переходной характеристики h(t) КС для двух указанных случаев;
- проанализировать влияние RИ на ЛЧХ и h(t) КС.
3.2 Методика выполнения
3.2.1 Предварительно необходимо ознакомиться с устройством и прин-ципом действия последовательных активных корректирующих средств, вы-полненных преимущественно на одном ОУ с инвертирующим входом [2, 6, 7], а также составить принципиальную электрическую схему заданного КС.
3.2.2 Искомые передаточные функции КС следуют из выражения [2,6,7]
W(p) = U2(р) / E(p) = - Z0(р) / [RИ + ZВХ], (3)
в которое подставляются предварительно найденные значения комплексных сопротивлений ZВХ(р) и Z0(р) заданных RC- цепей.
3.2.3 Благодаря отрицательной обратной связи (ООС) по напряжению, выходное сопротивление схемы КС на ОУ близко к нулю [15-19], поэтому со-противление RН не влияет на передаточную функцию (3). Аналогично, если выходная цепь регулятора (см. рисунок 3) выполнена на ОУ с ООС, то сопро-тивление RИ в силу своей малости также не влияет на функцию (3).
3.2.4 Расчет и построение ЛЧХ и h(t) КС описаны в пунктах 2.2.3... 2.2.5.
4 Расчетно-графическая работа № 3. Функциональные устройства промышленной автоматики на операционных усилителях
Цель работы: получение навыков аппаратурного построения дополни-тельных устройств при пусконаладочных работах систем автоматизации тех-нологических процессов.
4.1 Задание
В ходе наладочных работ установлено, что для командного блока су-ществующей САУ необходимо дополнительное электронное устройство ана-логового преобразования электрических сигналов (АПС) U1, U2 и U3, изменя-ющихся во времени, и постоянного сигнала U0. Ниже приведены пронумеро-ванные варианты задаваемых алгоритмов, реализуемых устройством АПС. Его выходное напряжение UВЫХ должно быть:
00. – ∫(U1 +2U2 + 5U3) dt; 01. ∫(U1 +3U2 + 4U3) dt;
02. 2∫(U1 - 6U2 - 7U3) dt; 03. 2U1 + 3∫(U2 +5U3) dt;
04. U1 - 2U2 + 3∫U3dt; 05. 2U1U2 + 3∫U3dt;
06. 3(U1 + 2∫U2dt) +4U3; 07. 4∫[U1 + 3∫(U2 +2U3) dt] dt;
08. [U1 +U2 + ∫(U1 +U2) dt] / (U0 + U1 +U2); 09. U1 +2U2 + 3∫(U1 +2U2) dt;
10. [U1 +2U2 + 5∫(U1 +2U2) dt](U1 +2U2); 11. 2∫(U0 + 2U1 +3U2 +4U3) dt;
12. – 3∫(U1 +2U2 - 5U3) dt + 3U0; 13. U0 +2U1+3∫ (∫U2 dt + 4 U3) dt;
14. - U1 + U2 - 3∫U3dt + 4U0; 15. U1√(2U2 + 3U0) + 4∫U3dt;
16. 2∫( U1 +3∫ U2dt) dt - 4U0; 17. 2∫[U1 + 3∫(U2 +3U3) dt] dt - 5U0;
18. - 3∫(U1 - 2 U2U3) dt +2U0; 19. U1 - 2U2 - 3∫UВЫХ dt;
20. – (2U1 +U2) + 2∫(2U1 +U2) dt + U0; 21. 2∫(U1 +2U2 - 3UВЫХ ) dt;
22. ∫[U1√(2U2 + 5U0) +4U3] dt; 23. 2∫(U1 + 2 U2U3) dt;
24. [U1 + 3∫U3dt] / (U0 +2U2); 25. (U1 +2U2)2 (3U3 - UВЫХ);
26. (2U3 - UВЫХ) / (U1 +2U2); 27. (2U1 +3U2) ∫(U3 - UВЫХ) dt;
28. ∫(U3 - 2UВЫХ) dt / (2U1 +U2); 29. (U1 +U2)(U2 - 2U3) (3U3 - UВЫХ).
Вариант задания находится следующим образом. Последняя цифра дву-значного номера варианта равна последней цифре номера зачетной книжки. Первая цифра номера варианта определяется первой буквой фамилии магист-ранта: 0 - при А,Б,В,…К; 1- при Л,М,Н,О,П; 2 - при Р,С,Т,…Я. Например, для «Иванова» с № = 408055 получаем 5-й вариант: UВЫХ = 2U1U2 + 3∫U3dt. Требуется составить и рассчитать схему устройства АПС с применением RC-цепей и нескольких ОУ с преимущественно инвертирующим входом, на-чертить принципиальную схему устройства АПС со спецификацией использо-ванных элементов. Для снижения массогабаритных показателей и обеспече-ния стабильности работы этого устройства необходимо минимизировать чис-ло его ОУ, конденсаторы использовать неполярные с большой постоянной времени и номинальной емкостью 0,1…1,0 мкФ, резисторы применять с номи-налами не более 1 МОм. Нагрузка каждого ОУ должна быть не менее 10 кОм.
4.2 Методика выполнения
4.2.1 Предварительно необходимо ознакомиться с применяемыми в САУ и промышленной электронике функциональными устройствами на ОУ [2, 15-21], а также с характеристиками и параметрами таких пассивных компо-нентов электронных устройств, как резисторы и конденсаторы [17, 20-26].
4.2.2 Для разработки заданного устройства АПС используются инверти-рующие усилители и сумматоры, суммирующие инвертирующие интеграто-ры, перемножители и делители сигналов, квадраторы и схемы извлечения квадратного корня. При этом предполагается, что применяемые ОУ имеют свойства, близкие к идеальным. На рисунке 4а приведен инвертирующий сум-матор [2], у которого
UВЫХ = - (R0UВХ1 / R1 + R0UВХ2 / R2 + … +R0UВХn / RN). (4)
При использовании только одного входа получается инвертирующий усилитель с коэффициентом усиления R0 / R1. На рисунке 4б приведен сумми-рующий инвертирующий интегратор [2], у которого
UВЫХ = - ∫(UВХ1 / СR1 + UВХ2 / СR2 + … +UВХn / СRN) dt. (5)
При использовании только одного входа получается инвертирующий интегратор с коэффициентом передачи 1/ СR1.
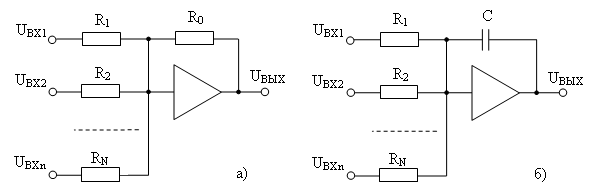
Рисунок 4 – Инвертирующие сумматор (а) и суммирующий интегратор (б)
4.2.3 В пояснительной записке желательно привести результаты про-межуточных этапов разработки устройства АПС, отражающие поиск его опти-мальной структуры. В окончательной схеме устройства АПС его нелинейные узлы, построенные на базе перемножителей сигналов, для упрощения могут быть показаны в виде блоков, но принцип их действия должен быть пояснен на отдельных чертежах.
4.2.4 Задаваемыми свойствами обладают низковольтные низкочастот-ные конденсаторы с органическим диэлектриком: металлобумажные, лакопле-ночные, полиэтилентерефталатные, поликарбонатные. Принятые или рассчи-танные на основании (5) значения емкостей конденсаторов должны соответ-ствовать номинальным, указанным в справочниках [24, 25].
4.2.5 По рассчитанным на основании (4,5) значениям выбираются стан-дартные резисторы из ряда Е24, которому соответствуют допустимые откло-нения 5 % [24, 26].
Список литературы
1 Стандарт организации СТ НАО 56023-1910-01-2009 Работы учебные. Общие требования к построению, изложению, оформлению и содержанию учебной документации. – Алматы: АИЭС, 2009. – 38 с.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического управ-ления. - СПб, Изд-во «Профессия», 2004. – 752 с.
3. Теория автоматического управления / Под ред. Ю.М. Соломенцева. – М.: Высш. шк., 2003. – 268 с.
4.Теория автоматического управления / Под ред. В.И. Лачина. – Ростов н/Д: Феникс, 2007. – 469 с.
5. Певзнер Л.Д. Практикум по теории автоматического управления.- М.: Высш. шк., 2006. – 590 с.
6. Анхимюк В.Л., Опейко О.Ф., Михеев Н.Н. Теория автоматического управления. – Мн: Дизайн ПРО, 2002. – 352 с.
7. Коновалов Г.Ф. Радиоавтоматика. – М.: Радиотехника, 2003. - 288 с.
8. Наладка средств автоматизации и автоматических систем регулиро-вания / Под ред. А.С. Клюева. – М.: Энергоатомиздат, 1989. – 368 с.
9. Выгодский М.Я. Справочник по высшей математике. – М.: ООО «Из-дательство Астрель», 2003. – 992 с.
10. Гусак А.А., Гусак Г.М., Бричикова Е.А. Справочник по высшей ма-тематике. – Мн.: ТетраСистемс, 2004. – 640 с.
11. Корн Г., Корн Т. Справочник по математике (для научных работни-ков и инженеров). Определения, теоремы, формулы. – СПб.: Издательство «Лань», 2003. – 832 с.
12. Полянин А.Д., Полянин В.Д., Полянин В.А. и др. Справочник для студентов технических вузов: высшая математика: физика: теоретическая механика: сопротивление материалов. – М.: АСТ: Астрель, 2007. – 736 с.
13. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. – М.: Наука, 1986. - 544 с.
14. Сборник задач по теории автоматического управления / Под ред. В.А. Бесекерского. – М.: «Наука», 1975. – 512 с.
15. Опадчий Ю.Ф., Глудкин О.П., Гуров А.И. Аналоговая и цифровая электроника - М.: Горячая линия-Телеком, 2005. – 768 с.
16. Павлов В.Н. Схемотехника аналоговых электронных устройств. – М.: Издательский центр «Академия», 2008. – 288 с.
17. Гусев В.Г., Гусев Ю.М. Электроника и микропроцессорная техника. – М.: Высш. шк., 2006. – 799 с.
18. Волович Г.И. Схемотехника аналоговых и аналого-цифровых электронных устройств. – М.: Издательский дом «Додэка-XXI», 2005. - 528 с.
19. Бойко В.И. и др. Схемотехника электронных систем. Аналоговые и импульсные устройства. – СПб.: БХВ-Петербург, 2004. – 496 с.
20. Титце У., Шенк К. Полупроводниковая схемотехника: в 2 т.: пер. с нем. – Т.2. – М.: Додэка-XXI, 2008. – 942 с.
21. Хоровиц П., Хилл У. Искусство схемотехники. – М.: БИНОМ, 2010. – 704 с.
22. Петров К.С. Радиоматериалы, радиокомпоненты и электроника. – СПб.: Питер, 2003. – 512 с.
23. Козлова И.С., Щербакова Ю.В. Справочник по радиотехнике. – Ростов н/Д: Феникс, 2008. - 314 с.
24. Акимов Н.Н. и др. Резисторы, конденсаторы, трансформаторы, дроссели, коммутационные устройства РЭА. – Мн.: Беларусь, 1994. – 591с.
25. Электрические конденсаторы и конденсаторные установки / Под ред. Г.С. Кучинского. – М.: Энергоатомиздат, 1987. – 656 с.
26. Резисторы / Под ред. И.И.Четверткова и В.М.Терехова. – М.: Радио и связь, 1991. – 528 с.
Содержание
1. Общие указания 3
2. Расчетно-графическая работа № 1. Пассивные корректирующие средства 3
2.1 Задание 3
2.2 Методика выполнения 5
3. Расчетно-графическая работа № 2. Активные корректирующие средства 5
3.1 Задание 5
3.2 Методика выполнения 6
4. Расчетно-графическая работа № 3. Функциональные устройства
промышленной автоматики на операционных усилителях 7
4.1 Задание 7
4.2 Методика выполнения 8
Список литературы 9