Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ
И СВЯЗИ
Кафедра инженерной кибернетики
НЕЛИНЕЙНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Методические указания по выполнению
лабораторных работ
для студентов специальности 5В070200
Алматы 2014
Составитель: Б.А.Чернов. Нелинейные системы автоматического регулирования. Методические указания по выполнению лабораторных работ для студентов специальности 5В070200. – Алматы: АУЭС, 2014. – 35 с.
В методических указаниях приведено описание лабораторных работ, предназначенных для формирования навыков экспериментального исследова-ния реальных нелинейных устройств систем автоматического управления и регулирования (САУ). Даны краткие теоретические сведения о видах нелиней-ных звеньев и автоматизации измерений их характеристик, о гармонической линеаризации нелинейностей и изображении процессов на фазовой плоскости, о генераторах сигналов специальной формы. Приведены описание и функцио-нально-принципиальные схемы лабораторного оборудования. Методические указания содержат также методики проводимых исследований, обработки опытных данных и анализа полученных результатов, а также контрольные во-просы и перечень рекомендуемой учебной и справочной литературы.
Ил. 13, табл. 1, библиогр. – 19 назв.
Рецензент: доц. Башкиров М.В.
Печатается по плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2014 г.
Ó НАО «Алматинский университет энергетики и связи», 2014 г.
Содержание
Введение
1 Лабораторная работа. Статические нелинейные звенья
1.1 Описание применяемого оборудования
1.1.1 Стенд «Многоконтурные САУ»
1.1.2 Специальное программное обеспечение. Руководство оператора программы «Многоконтурные САУ»
1.2 Краткие теоретические сведения. Виды и типы нелинейных звеньев
1.3 Рабочее задание
1.4 Порядок и методика выполнения лабораторной работы
1.5 Результаты работы и содержание отчета
1.6 Контрольные вопросы
2 Лабораторная работа. Автоматизированное исследование нелинейных звеньев
2.1 Краткие теоретические сведения
2.1.1 Автоматизация измерений
2.1.2 Генераторы сигналов специальной формы
2.2 Рабочее задание
2.3 Порядок и методика выполнения лабораторной работы
2.4 Результаты работы и содержание отчета
2.5 Контрольные вопросы
3 Лабораторная работа. Исследование формы выходного сигнала нелинейных звеньев при гармоническом воздействии
3.1 Краткие теоретические сведения
3.1.1 Метод гармонической линеаризации
3.1.2 Гармоническая линеаризация нелинейностей
3.2 Рабочее задание
3.3 Порядок и методика выполнения лабораторной работы
3.4 Результаты работы и содержание отчета
3.5 Контрольные вопросы
4 Лабораторная работа. Фазовые портреты САУ
4.1 Краткие теоретические сведения
4.1.1 Изображение процессов на фазовой плоскости
4.1.2 Схемы электронных моделей
4.2 Рабочее задание
4.3 Порядок и методика выполнения лабораторной работы
4.4 Результаты работы и содержание отчета
4.5 Контрольные вопросы
Приложение А. Общие сведения об операционных усилителях
Список литературы
Введение
Практически все системы управления, строго говоря, являются нелиней-ными, т.е. описываются нелинейными уравнениями. Линейные системы явля-ются их линейными моделями, которые получаются путем обычной линеари-зации, состоящей в разложении нелинейных функций в ряд Тейлора и отбра-сывании нелинейных слагаемых. Однако такая линеаризация не всегда воз-можна. Если нелинейность допускает обычную линеаризацию, то такая нели-нейность называется несущественной. В противном случае нелинейность на-зывается существенной [1]. Существенными нелинейностями обладают, на-пример, релейные элементы. Даже в тех случаях, когда обычная линеаризация возможна, часто на конечном этапе исследования может потребоваться рас-смотрение исходной нелинейной модели.
Нелинейные системы по сравнению с линейными обладают рядом прин-ципиальных особенностей. В частности, такими особенностями является сле-дующее:
- не выполняется принцип суперпозиции, и исследование нелинейной системы при нескольких воздействиях нельзя сводить к исследованию при од-ном воздействии;
- устойчивость и характер переходного процесса зависят от величины начального отклонения от положения равновесия;
- при фиксированных внешних воздействиях возможны несколько (ино-гда и бесконечное множество) положений равновесия;
- возникают свободные установившиеся процессы, например, автоколе-бания, которые в линейных системах невозможны.
Универсальных аналитических (математических) методов исследования нелинейных систем нет. В процессе развития теории автоматического управ-ления (ТАУ) были разработаны различные математические методы анализа и синтеза нелинейных систем автоматического управления (САУ), каждый из которых применим для определенного класса систем и задач [1-11]. Для ис-следования нелинейных САУ наиболее широко используются методы фазо-вой плоскости, функций Ляпунова, гармонической линеаризации и абсолют-ной устойчивости.
Любое исследование более или менее сложных нелинейных САУ, как правило, заканчивается математическим моделированием, которое является одним из универсальных неаналитических методов исследования.
Выпускники специальности 5В070200 – «Автоматизация и управление» должны уметь анализировать и разрабатывать нелинейные САУ для различ-ных технологических объектов и процессов. Существенную помощь в приоб-ретении навыков по анализу и синтезу таких систем, помимо лекционных и практических занятий, окажет лабораторный практикум.
Лабораторные работы могут выполняться фронтально на нескольких имеющихся на кафедре «Инженерная кибернетика» однотипных учебных стендах «Многоконтурные САУ», в которых установлены промышленные им-пульсные регуляторы и исполнительные механизмы, а также широко распро-страненные в современных САУ [2 – 5, 12] электронные устройства на интег-ральных операционных усилителях (см. рисунок 1). Каждый стенд оснащен многоканальным аналого-цифровым преобразователем (АЦП) и персональ-ным компьютером (ПК) со специальным программным обеспечением, позво-ляющими измерять и регистрировать одновременно несколько сигналов, а также одновременно строить несколько графиков их функциональных зависи-мостей как в статике, так и в динамике.
До дня проведения лабораторной работы студенты должны к ней подго-товиться: прочитать ее описание, выполнить расчетное задание, обработать экспериментальные данные предыдущей работы. Вся без исключения учебная и справочная литература, приведенная в конце данных методических указа-ний, имеется в библиотеке университета.
Отчеты по лабораторным работам излагаются и оформляются в соответ-ствии с требованиями фирменного стандарта Алматинского университета энергетики и связи. Данные отчеты должны обязательно содержать выводы, в которых анализируются проведенные эксперименты, сравниваются получен-ные данные с теоретическими расчетами, отмечается познавательная ценность полученных результатов для усвоения учебного материала. Отчеты по лабора-торным работам должны быть защищены студентами.
1 Лабораторная работа. Статические нелинейные звенья
Цель работы: изучение построения на операционных усилителях раз-личных безынерционных нелинейных звеньев и приобретение навыков экспе-риментального исследования их статических характеристик (СХ).
1.1 Описание применяемого оборудования
Лабораторная работа выполняется на стенде «Многоконтурные САУ» (см. рисунок 2). Рядом со стендом располагается персональный компьютер для проведения в автоматизированном режиме измерений и обработки результатов измерений, а также переносные осциллографы типа С1- 83, С1-107 и генераторы типа DEGEM SYSTEM-141В1, Г3-110.
1.1.1 Стенд «Многоконтурные САУ».
В настольном стенде «Многоконтурные САУ» установлены (см. ри-сунки 3 и 4): регулируемый стабилизированный двухполярный источник (ИВ) напряжения UИВ с встроенным стрелочным вольтметром; выполненные на резисторах и интегральных операционных усилителях перестраиваемые нелинейные элементы; блок управления (БУ) с пусковой аппаратурой; ревер-сивный исполнительный механизм (ИМ) постоянной скорости в виде одно-фазного электродвигателя переменного тока с редуктором; указатель положе-

Рисунок 1 – Внешний вид комплекта учебного оборудования

Рисунок 2 – Настольный стенд «Многоконтурные САУ»

Рисунок 3 - Функционально-принципиальная схема лабораторной установки для исследования однозначных нелинейностей
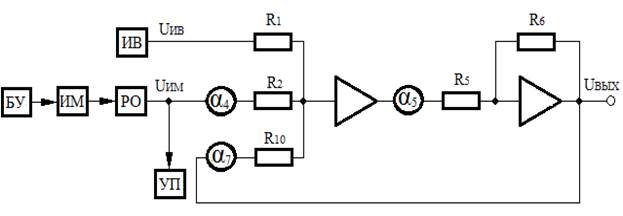
Рисунок 4 - Функционально-принципиальная схема лабораторной установки для исследования неоднозначных нелинейностейния (УП) вала ИМ; регулирующий орган (РО) в виде переменного рези-стора и управляемого источника напряжения UИМ; вольтметр V1; четырехка-нальный АЦП и настольный ПК со специальным программным обеспечени-ем, позволяющие измерять и регистрировать одновременно четыре сигнала с построением графиков их функциональных зависимостей.
Отмеченная цепь устройств БУ, ИМ, РО и УП используется для получе-ния дополнительного регулируемого стабилизированного двухполярного на-пряжения UИМ. АЦП предназначен для оцифровки аналоговых сигналов, сни-маемых с выбранных точек стенда. В стенде применены операционные уси-лители в виде интегральных микросхем LM358М.
Стенд представляет собой ряд закрепленных на общей раме модулей, образующих единое наборно-коммутационное поле и имеющих постоянные внутренние электрические соединения между собой. Необходимые для вы-полнения рабочего задания схемы собираются на наборно-коммутационном поле с помощью операционных усилителей, делителей напряжения (потенци-ометров) α4… α7, резисторов R1…R9, конденсаторов С1…С12, тумблеров и специальных гибких электрических проводников разной длины и разного цвета, называемых коммутационными шнурами. Коммутационные шнуры имеют на своих концах однополюсные вилки, которые вставляются в гнезда наборно-коммутационного поля. Электрические схемы модулей стенда име-ют «общую точку», поэтому для соединения соответствующих входа и выхо-да достаточно одного коммутационного шнура.
Сборку электрических цепей необходимо проводить только при отклю-ченном источнике питания. При этом коммутационные шнуры нужно распо-лагать аккуратно, избегая их переплетения, провисания и натяжения.
Верхнее положение ручек тумблеров стенда соответствует их включен-ному состоянию. Коэффициенты передачи потенциометров α4… α7 регулиру-ются с помощью установочных ручек в пределах 0…1.
Стрелочный вольтметр модуля «Источник возмущения» (ИВ) имеет нуль посредине шкалы. Расположение стрелки справа (слева) от нуля соот-ветствует положительному (отрицательному) напряжению UИВ.
Для удобства коммутации выход каждого операционного усилителя повторен (размножен) три раза. Применяемые усилители имеют один вход (инвертирующий). Общие сведения об операционных усилителях приведены в приложении А.
Измерение и регистрация сравнительно высокочастотных и импульс-ных сигналов могут производиться с помощью сервисного двухканального осциллографа типа С1- 83 или портативного осциллографа-мультиметра типа С1-107, оснащенных осциллографическими пробниками стандартной конст-рукции. Резисторы нелинейных элементов имеют следующие номинальные значения: R1 = R3 = R4 = R6 = R7 = R9 = R10 = 1 Мом, R2 = R5 = R8 = 200 кОм.
1.1.2 Специальное программное обеспечение. Руководство оператора программы «Многоконтурные САУ».
Названное программное обеспечение (ПО) предназначено для визуали-зации цифровой и графической информации, получаемой со стенда.
1.1.2.1 Запуск ПО осуществляется двойным щелчком «мыши» по ярлы-ку «САР» на рабочем столе. Также ПО может запускаться из меню Windows – Пуск > Программы > Chip Engineering > САР. После запуска ПО выводит ок-но, содержащее рабочую область с панелью главного меню, с диаграммами процессов и с панелью состояния. Панель главного меню содержит разделы «Файл», «Измерение» и «Вид графика».
Соединение ПО со стендом осуществляется через СОМ-порт. Для под-ключения необходимо выбрать пункт «Соединить» раздела «Измерение» главного меню. После успешного соединения ПО на графиках отобразятся сигналы, полученные со стенда.
Для отключения ПО от стенда необходимо выбрать пункт «Разъеди-нить» раздела «Измерение» главного меню. После разъединения на панели состояния появится надпись «отключено», а данные на графиках перестанут обновляться.
1.1.2.2 Изменить настройки ПО можно, выделив пункт «Настройка» раздела «Измерение» главного меню. На экране появится форма настройки ПО с закладками «Порт», «Графики», «Канал 1», «Канал 2», «Канал 3» и «Ка-нал 4», позволяющая вносить изменения в настройки только графиков. Нас-тройки порта и каналов индивидуально адаптированы к конкретному стенду и его АЦП. Поэтому настройки порта и каналов изменению не подлежат.
Перейти к настройке графиков можно щелчком левой кнопки «мыши» по закладке «Графики». После нажатия кнопки активируется соответствую-щая закладка с настройками графиков. Данная закладка позволяет установить минимальные и максимальные значения графиков (диапазоны измерений ди-аграмм процессов) по оси Y, а также задать число измерений по оси Х. Пара-метр «Время между измерениями» выбирается из выпадающего списка пред-лагаемых возможных значений и означает время между двумя соседними из-мерениями АЦП (величина, обратная частоте дискретизации АЦП). Чем больше число измерений и время между измерениями, тем меньше «скорость диаграммы».
Изменения будут внесены только после нажатия кнопки «ОК». Кнопка «Отмена» закрывает форму настроек без сохранения изменений.
Для увеличения графиков щелкните два раза по области определенного графика и она развернется на весь экран.
1.1.2.3 Имеется возможность отображения измеряемых значений не только как функций времени, но и значений «Канал 1» как функции значений «Канал 2», а также значений «Канал 3» как функции значений «Канал 4» - так называемый режим отображения «Х-Y».
Для вывода графика для просмотра в режиме «Х-Y» нужно выбрать в меню «Вид графика» желаемый график для отображения, щелкнув по соот-ветствующему пункту меню левой кнопкой «мыши». После этого будет вы-ведено окно, в котором диапазоны и масштабы осей Х и Y соответствуют на-стройкам диапазонов и масштабов выбранных каналов в основном окне ПО. Для одновременного вывода и второго графика для просмотра в режиме «Х-Y», нужно сначала передвинуть окно первого графика с центра экрана мо-нитора на его периферию для освобождения места для окна второго графика, а затем повторить действия, аналогичные выводу первого графика.
1.1.2.4 Программа позволяет сделать снимок сигналов, поступающих со стенда. В отдельном файле измерений будут сохранены данные, отображае-мые на графиках в момент сохранения. Открыть файл можно, выбрав пункт «Открыть» раздела «Файл» главного меню. После открытия файла на графи-ках отобразятся сигналы, сохраненные во время предыдущих измерений.
Для сохранения файла измерений необходимо выбрать пункт «Сохра-нить» раздела «Файл» главного меню. После нажатия пункта «Сохранить» на экране появится форма сохранения файла. Укажите имя файла, в котором бу-дут сохранены измерения, и нажмите кнопку «Сохранить». Теперь данные измерений, отображаемые на графиках, можно посмотреть в Microsoft Excel.
Откройте сохраненный файл в программе Microsoft Excel. В верхней строке формата Excel указано число измерений на графике. В левом столбце указан номер измерения. Далее следуют столбцы Ch1- Ch4, которые соответ-ствуют каналам 1 - 4.
1.2 Краткие теоретические сведения. Виды и типы нелинейных элементов и звеньев
Нелинейной САУ называется такая система, которая содержит хотя бы одно звено, описываемое нелинейным уравнением. Перечислим виды нели-нейных звеньев [2]: релейного типа, с кусочно-линейной характеристикой, с криволинейной характеристикой любого очертания, перемножитель и дели-тель сигналов, нелинейный импульсный элемент, логическое, переменной структуры.
Различают статические и динамические нелинейности. Первые описы-ваются нелинейными алгебраическими уравнениями, а вторые – нелинейны-ми дифференциальными уравнениями. Статические нелинейные элементы можно представить в виде нелинейных статических характеристик.
Динамические нелинейности проявляют себя только в динамике, т.е. при изменении величин во времени. Такие нелинейности зависят от произ-водных соответствующих величин по времени. Статические же нелинейнос-ти проявляют себя как в статике, так и в динамике [3].
В практике различают [5, 6] нелинейные элементы с гладкой нелиней-ной, кусочно-линейной и кусочно-постоянной характеристиками. Все нели-нейные характеристики могут быть разделены на однозначные и неоднознач-ные (многозначные). Неоднозначная характеристика получается, если, напри-мер, при увеличении входного сигнала выходная координата изменяется по одной зависимости, а при уменьшении – по другой зависимости. Часто такие характеристики называют гистерезисными.
В автоматических системах широко распространены [1, 4, 6] следую-щие типовые статические нелинейности, отличающиеся от реальных кусоч-но-линейной аппроксимацией: зона нечувствительности, ограничение (на-сыщение), мертвый ход, гистерезис, люфт, упор, диодная характеристика (идеальный выпрямитель), квантование по уровню, идеальное реле (сухое трение), реле с зоной нечувствительности, реле с гистерезисом, реле с зоной нечувствительности и гистерезисом и др.
Статические нелинейности могут быть непрерывными или релейными, петлевыми гистерезисными или петлевыми опережающими. Простейшими нелинейными элементами являются статические (безынерционные) однознач-ные нелинейности [6].
Структура и уравнение нелинейной САУ в общем случае могут быть очень сложными. Степень сложности зависит от количества, вида и места включения нелинейных элементов. Однако большинство систем, встречаю-щихся в промышленной автоматике, содержит один существенно нелиней-ный элемент.
В управляющих устройствах автоматических систем наряду с релейны-ми элементами часто используются так называемые особые нелинейности. К ним относятся перемножители сигналов, элементы логические и с перемен-ной структурой.
Приведенная на рисунке 3 схема позволяет построить нелинейные зве-нья с однозначными СХ, показанными на рисунках 5 и 6. При этом UСМ – на-пряжение смещения, UПОР – напряжение порога переключения.

Рисунок 5 – Статическая характеристика усилительного звена

Рисунок 6 – Статическая характеристика сравнивающего устройства (компаратора)
Приведенная на рисунке 4 схема позволяет построить нелинейное звено с неоднозначной СХ, показанной на рисунке 7. При этом UН – напряжение нижнего порога переключения, UВ - напряжение верхнего порога переключе-
ния, UГ – величина гистерезиса.

Рисунок 7 – Статическая характеристика исследуемой неоднозначной нелинейности
1.3 Рабочее задание
1.3.1 Ознакомиться с конструкцией, техническим описанием и програм-мным обеспечением стенда «Многоконтурные САУ» (см. подраздел 1.1).
1.3.2 Собрать, опробовать и настроить усилительное звено с ограниче-нием выходного напряжения по амплитуде. Снять и графически построить его СХ при различных коэффициентах усиления, величинах смещения UСМ и ограничения UВЫХmax, UВЫХmin (см. рисунок 5).
1.3.3 Собрать, опробовать и настроить сравнивающее устройство с ог-раничением выходного напряжения по амплитуде (компаратор). Снять и гра-фически построить его СХ при различных величинах порога переключения UПОР и ограничения UВЫХmax, UВЫХmin (см. рисунок 6).
1.3.4 Собрать, опробовать и настроить релейное звено с гистерезисом и ограничением выходного напряжения по амплитуде. Снять и графически по-строить его СХ при различных величинах порогов переключения UН, UВ и ог-раничения UВЫХmax, UВЫХmin (см. рисунок 7).
1.3.5 На основании проведенных экспериментов определить вид и тип исследованных нелинейных звеньев.
1.3.6 Проанализировать влияние органов настройки БУ и α4, α5, α7 на па-раметры исследованных нелинейных звеньев.
1.4 Порядок и методика выполнения лабораторной работы
1.4.1 Собрать схему для исследования усилительного звена (см. рису-нок 3). Включить резистор R3. Входы первого, второго и третьего каналов АЦП соединить с выходами соответственно ИВ, ИМ и исследуемого усили-теля для измерения и регистрации сигналов UИВ, UИМ, UВЫХ на экране мони-тора ПК.
Сигнал UИВ удобно измерять и встроенным вольтметром ИВ. А сигнал UВЫХ можно измерять и вольтметром V1. Но надо иметь в виду, что при изме-нении полярности сигнала UВЫХ необходимо менять местами проводники на гнездах вольтметра.
1.4.2 Подать питание 220 В на стенд и ПК. Запустить программу визуа-лизации и регистрации измеряемых сигналов по п. 1.1.2.
1.4.3 С помощью кнопок «Больше» и «Меньше» в режиме «Ручное» БУ выставить напряжение UИМ = 0. Установить α4 = 0,4; α5 = 0,2; α7 = 1.
1.4.4 Включить ИВ. Изменяя напряжение UИВ, снять и графически пост-роить СХ UВЫХ(UИВ) данного звена. При этом необходимо отмечать коорди-наты характерных точек (изломов, разрывов) этой зависимости.
1.4.5 Повторить п. 1.4.4 при других значениях α4, например, 0,7 и 1.
1.4.6 С помощью кнопок «Больше» и «Меньше» выставить напряжение UИМ = 5 В и повторить п. 1.4.4 при α4 = 1.
1.4.7 Повторить п. 1.4.6 при UИМ = - 5 В.
1.4.8 Установить α5 = 0,1 и повторить п. 1.4.7.
1.4.9 Отключить резистор R3 и повторить пункты 1.4.3, 1.1.4, 1.4.6-1.4.8.
1.4.10 Собрать схему для исследования релейного звена с гистерезисом (см. рисунок 4). Входы первого, второго и третьего каналов АЦП по-прежне-му соединены с выходами соответственно ИВ, ИМ и исследуемого звена (см. п. 1.4.1).
1.4.11 Установить α4 = α5 = α7 = 0,2. С помощью кнопок «Больше» и «Меньше» в режиме «Ручное» БУ выставить напряжение UИМ = 0.
1.4.12 Включить ИВ. Изменяя напряжение UИВ, снять и графически построить СХ UВЫХ(UИВ) данного звена сначала при увеличении UИВ с – 10 до + 10 В, а затем при уменьшении с + 10 до – 10 В. При этом необходимо отме-чать координаты характерных точек (изломов, разрывов) этой зависимости.
1.4.13 Повторить п. 1.4.12 при других значениях α7, например, 0,4 и 0,6.
1.4.14 Установить α7 = 0,2 и повторить п. 1.4.12 сначала при UИМ = 5 В, а затем при UИМ = - 5 В.
1.4.15 Установить α5 = 0,1; UИМ = 0 и повторить п. 1.4.12.
1.5 Результаты работы и содержание отчета
Оформить в соответствии с фирменным стандартом подробный отчет с вычерчиванием собранных схем, таблиц и графиков полученных СХ, с вы-полнением пунктов 1.3.5 и 1.3.6 рабочего задания и написанием выводов.
1.6 Контрольные вопросы
1. Отличие динамических нелинейностей от статических.
2. Привести примеры нелинейных элементов с гладкой нелинейной, кусочно-линейной и кусочно-постоянной статической характеристикой.
3. Понятие существенной и несущественной нелинейностей.
4. Виды нелинейных звеньев и их статические характеристики.
5. Понятие однозначной и неоднозначной нелинейных характеристик.
6. Статические характеристики типовых однозначных нелинейностей.
7. Статические характеристики типовых неоднозначных нелинейностей.
8. Статические нелинейности релейного типа без гистерезиса.
9. Статические нелинейности релейного типа с гистерезисом.
10. Особые нелинейности.
11. Статические характеристики петлевых нелинейностей.
12. Несколько примеров нелинейных звеньев с гистерезисной характерис-тикой и области их применения.
13. Привести несколько примеров СХ непрерывных и релейных нелиней-ных звеньев.
14. Примеры простейших нелинейных элементов и их СХ.
15. Обычная линеаризация нелинейных функций.
16. Принципиальные отличия нелинейных систем от линейных.
17. Наиболее широко используемые методы исследования нелинейных САУ и их краткая характеристика.
18. Универсальные и неуниверсальные, аналитические и неаналитические методы исследования нелинейных систем.
2 Лабораторная работа. Автоматизированное исследование нелинейных звеньев
Цель работы: приобретение навыков автоматизации эксперименталь-ного исследования статических характеристик нелинейных звеньев.
Оборудование (см. рисунки 8 и 9): установленные в настольном стенде «Многоконтурные САУ» регулируемый стабилизированный двухполярный источник (ИВ) напряжения UИВ с встроенным стрелочным вольтметром; вы-полненные на резисторах и интегральных операционных усилителях пере-страиваемые нелинейные элементы; четырехканальный АЦП и настольный ПК с программным обеспечением, позволяющие измерять и регистрировать одновременно четыре сигнала с построением графиков их функциональных зависимостей, а также функциональный генератор DEGEM SYSTEM-141В1 для выработки напряжения UС в виде треугольных и синусоидальных сигна-лов. Для повышения стабильности амплитуды выходного напряжения в наз-ванном генераторе применены сложные замкнутые системы автоматической стабилизации.
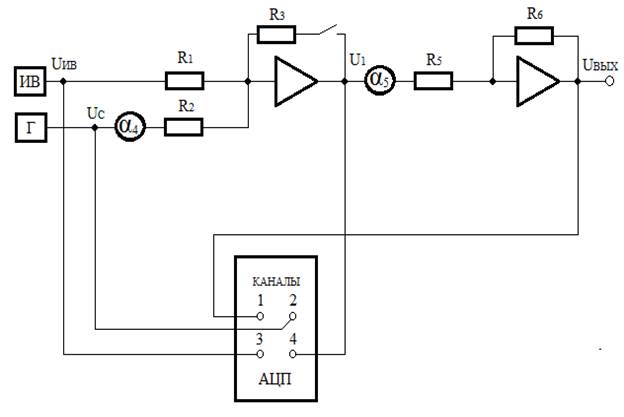
Рисунок 8 - Функционально-принципиальная схема лабораторной установки для автоматизированного исследования однозначных нелинейностей
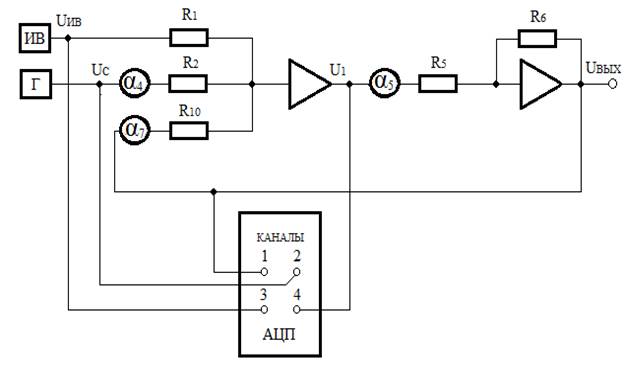
Рисунок 9 - Функционально-принципиальная схема лабораторной установки для автоматизированного исследования неоднозначных нелинейностей
Более подробное описание оборудования приведено в подразделе 1.1, а общие сведения об операционных усилителях даны в приложении А.
2.1 Краткие теоретические сведения
2.1.1 Автоматизация измерений.
Проблема автоматизации измерений была актуальной на протяжении многих лет и остается таковой в настоящее время [13]. Наиболее активный этап развития автоматизации измерений, начавшийся в 1970-е годы, связан с успехами в микроэлектронике, интенсивным внедрением цифровых средств измерения и радиоэлектронной аппаратуры, микропроцессоров и микро-ЭВМ. По степени участия человека в процессе автоматизации принято раз-личать частичную и полную автоматизацию. При частичной автоматизации, т. е. в автоматизированных системах, только часть измерительных операций выполняется без участия оператора. При полной автоматизации, т. е. в авто-матических системах, весь процесс измерения осуществляется без участия человека.
Основные направления автоматизации измерений связаны с необходи-мостью за ограниченное время одновременно измерять, регистрировать зна-чительное число параметров и перерабатывать большие потоки информации. Успешное решение этих задач во многом зависит от взаимосвязанного разви-тия таких научных направлений, как информатика, измерительная и вычисли-тельная техника, автоматизация производственных процессов, новых техно-логий и др.
Автоматизация методов и средств измерений, процессов управления, хранения и анализа данных привела к созданию магистрально-модульных из-мерительно-вычислительных систем на основе компьютера.
Одним из достижений измерительной техники является использование в приборах встроенных микропроцессоров для управления, вычислений по определенному алгоритму.
Аналоговые приборы вытесняются многофункциональными цифровы-ми приборами, выполненными по современной интегральной технологии. Кроме визуальной индикации измерительной информации, цифровые прибо-ры имеют выход на ПК и принтер, тем самым расширяется непрерывный контроль параметров систем с регистрацией контролируемых значений и сиг-нализацией при выходе за пределы нормы.
Наличие микропроцессоров дает возможность полностью автоматизи-ровать работу цифровых приборов, что повышает эффективность экспери-ментального исследования многих процессов и одновременно облегчает про-цесс измерения.
Разнообразие задач, решаемых с помощью средств измерительной тех-ники, влечет за собой разработку разных по структуре и назначению измери-тельных систем от простейших до сложных структур, где ПК используют не только для обработки информации, но и для управления. Развитие этих сис-тем позволяет получать измерительную, контролирующую, диагностическую информацию за ограниченное время и при минимальном участии человека.
Сегодня экономически выгодны и настольные системы, построенные на малогабаритных компьютерах. Пользователь ПК создает гибкие многофунк-циональные настольные системы с возможностью подключения к сети.
2.1.2 Генераторы сигналов специальной формы.
Данные генераторы вырабатывают одиночные и периодические сигна-лы разнообразной формы [14, 15]: меандра, треугольной, трапецеидальной, пилообразной, синус-квадратной, колоколообразной, синусоидальной и др. Их применяют для настройки, испытаний, исследований устройств автомати-ки, вычислительной, измерительной, вибрационной техники, геофизической, биофизической, медицинской аппаратуры и др.
Простые и дешевые генераторы сигналов специальной формы выполня-ют на основе интеграторов с нелинейной обратной связью через какой-либо пороговый элемент с гистерезисом. Постоянное напряжение в процессе инте-грирования формируется в линейно изменяющееся напряжение, которое пос-ле определенного значения меняет знак. На выходе генератора формируется симметричное треугольное напряжение, которое затем можно преобразовать в сигнал другой формы. Такие генераторы обеспечивают ограниченный на-бор формируемых сигналов, имеют невысокую точность и стабильность.
Для формирования сигналов произвольной формы применяют функци-ональные генераторы, работающие на основе кусочно-линейного синтеза не-посредственно самого сигнала. В основе таких устройств лежит генератор ли-нейно изменяющегося напряжения (ГЛИН), длительность и амплитуду кото-рого можно изменять [16].
Сигнал любой произвольной формы можно получить из серии элемен-тарных линейно изменяющихся сигналов. Из заранее заданного набора диск-ретных значений в цифровое запоминающее устройство вводятся параметры (длительность и амплитуда) каждого элементарного сигнала, в конце цикла формируется специальный сигнал возврата к началу, что позволяет получить исходное значение сигнала. Работой генератора управляет микропроцессор.
Генераторы с программным управлением обеспечивают работу по пре-дварительно записанной в памяти программе, дистанционное управление вы-ходным напряжением и частотой, запуск приборов синхроимпульсом и др.
2.2 Рабочее задание
2.2.1 Ознакомиться с конструкцией и техническим описанием стенда «Многоконтурные САУ», функционального генератора типа DEGEM SYS-TEM-141В1, а также с программным обеспечением стенда (см. пункты 1.1.1, 1.1.2 и 2.1.2).
2.2.2 Собрать, опробовать и настроить автоматизированную установку для исследования усилительного звена с ограничением выходного напряже-ния по амплитуде. Получить и зарегистрировать графики его статических ха-рактеристик (СХ) на экране монитора ПК при различных коэффициентах уси-ления, величинах смещения UСМ и ограничения UВЫХmax, UВЫХmin (см. рисунок 5). Сигнал UС генератора использовать треугольной и синусоидальной формы различной частоты.
2.2.3 Собрать, опробовать и настроить автоматизированную установку для исследования сравнивающего устройства с ограничением выходного на-пряжения по амплитуде (компаратора). Получить и зарегистрировать графики его СХ на экране монитора ПК при различных величинах порога переключе-ния UПОР и ограничения UВЫХmax, UВЫХmin (см. рисунок 6).
Сигнал UС генератора использовать треугольной и синусоидальной формы различной частоты.
2.2.4 Собрать, опробовать и настроить автоматизированную установку для исследования релейного звена с гистерезисом и ограничением выходного напряжения по амплитуде. Получить графики его СХ на экране монитора ПК при различных величинах порогов переключения UН, UВ и ограничения UВЫХmax, UВЫХmin (см. рисунок 7).
Сигнал UС генератора использовать треугольной и синусоидальной формы различной частоты.
2.2.5 На основании проведенных экспериментов определить вид и тип исследованных нелинейных звеньев.
2.2.6 Проанализировать влияние органов настройки стенда и генератора на параметры СХ исследованных нелинейных звеньев.
2.3 Порядок и методика выполнения лабораторной работы
2.3.1 Собрать схему автоматизированной установки для исследования усилительного звена (см. рисунок 8). Сигнал UИВ с выхода ИВ используется для смещения СХ усилительного звена, а сигнал UС с выхода генератора ис-пользуется для сканирования СХ данного звена. Включить резистор R3. Ус-тановить α4 = 0,4; α5 = 0,2.
2.3.2 Подать питание 220 В на стенд, генератор и ПК. Запустить прог-рамму визуализации и регистрации измеряемых сигналов по п. 1.1.2.
2.3.3 На генераторе установить сигнал UС треугольной формы с часто-той 0,1 Гц и амплитудой 10 В.
2.3.4 Получить СХ усилительного звена на экране монитора ПК при UИВ = 0. Обратите внимание на форму сигнала U1.
2.3.5 Повторить п. 2.3.4 при других значениях α4, например, 0,7 и 1.
2.3.6 Выставить напряжение UИВ = 5 В и повторить п. 2.3.5 при α4 = 1.
2.3.7 Повторить п. 2.3.6 при UИВ = - 5 В.
2.3.8 Установить α5 = 0,1 и повторить пункты 2.3.6 и 2.3.7.
2.3.9 Опробовать получение СХ при других значениях частоты скани-рования, например, 0,5 Гц.
2.3.10 Опробовать получение СХ при синусоидальной форме сканиру-ющего сигнала UС.
2.3.11 Отключить R3 и повторить пункты 2.3.3, 2.3.4 и 2.3.6 – 2.3.11.
2.3.12 Собрать схему автоматизированной установки для исследования релейного звена с гистерезисом (см. рисунок 8). Подключение входов кана-лов АЦП остается прежним.
2.3.13 Установить α4 = α5 = α7 = 0,2 и повторить пункты 2.3.3 и 2.3.4.
2.3.14 Повторить п. 2.3.13 при других значениях α7, например, 0,4 и 0,6.
2.3.15 Установить α7 = 0,2 и повторить п. 2.3.13 сначала при UИВ = 5 В, а затем при UИВ = - 5 В.
2.3.16 Повторить п. 2.3.13 при α5 = 0,1 и UИВ = 0.
2.3.17 Повторить пункты 2.3.9 и 2.3.10.
2.4 Результаты работы и содержание отчета
Оформить в соответствии со стандартом подробный отчет с вычерчива-нием собранных схем, с представлением иллюстраций полученных СХ, с вы-полнением пунктов 2.2.5 и 2.2.6 рабочего задания и написанием выводов.
2.5 Контрольные вопросы
1. Форма и параметры сигналов генераторов специальной формы.
2. Генератор линейно изменяющегося напряжения, его выходные сигналы и принцип действия.
3. Форма выходных сигналов функциональных генераторов.
4. Принцип действия генератора сигналов специальной формы.
5. Актуальность автоматизации измерений и исследований.
6. Области применения генераторов сигналов специальной формы.
7. Принцип действия функционального генератора.
8. Кусочно-линейная статическая характеристика однополупериодного выпрямителя с зоной нечувствительности.
9. Кусочно-линейная статическая характеристика двухполупериодного выпрямителя с зоной нечувствительности.
10. Кусочно-линейная статическая характеристика однополупериодного выпрямителя с зоной нечувствительности и насыщением.
11. Кусочно-линейная статическая характеристика двухполупериодного выпрямителя с зоной нечувствительности и насыщением.
12. Статическая характеристика аналого-цифрового преобразователя.
13. Статическая характеристика устройства квантования по уровню.
14. Пеленгационная статическая характеристика.
15. Дискриминационная статическая характеристика.
16. Статическая характеристика устройства с люфтом.
17. Статическая характеристика устройства с зазором.
18. Статическая характеристика устройства с фрикционом и упором.
3 Лабораторная работа. Исследование формы выходного сигнала нелинейных звеньев при гармоническом воздействии
Цель работы: экспериментальное изучение формы выходного сигнала статических нелинейных звеньев при симметричных колебаниях, необходи-мое для вычисления коэффициентов гармонической линеаризации.
Применяемое оборудование и схемы лабораторной установки приведены в разделе 2 и на рисунках 5 - 7, 10, 11, а также в приложении А.
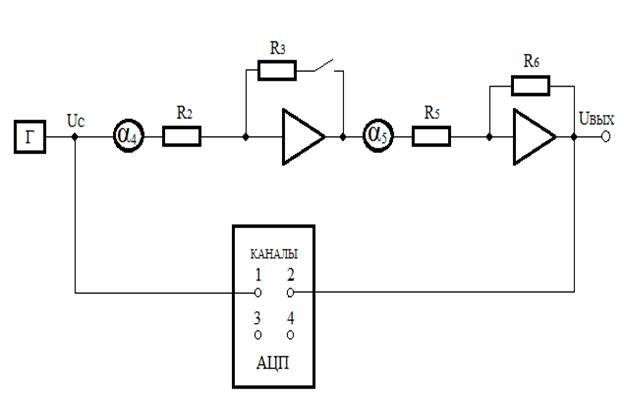
Рисунок 10 - Функционально-принципиальная схема лабораторной установки для исследования формы выходного сигнала однозначных нелинейностей
3.1 Краткие теоретические сведения
3.1.1 Метод гармонической линеаризации.
Данный метод относится к приближенным методам исследования авто-колебаний. Он позволяет определить условия существования и параметры ав-токолебаний в нелинейных системах практически любого порядка. Этот метод может быть использован также для исследования вынужденных колебательных режимов и приближенной оценки качества переходных процессов [1, 2, 5].
Метод гармонической линеаризации (или, иначе, гармонического балан-
са) основан на исследовании поведения системы при гармоническом (синусо-идальном) воздействии, подаваемом на вход нелинейного элемента, и замене
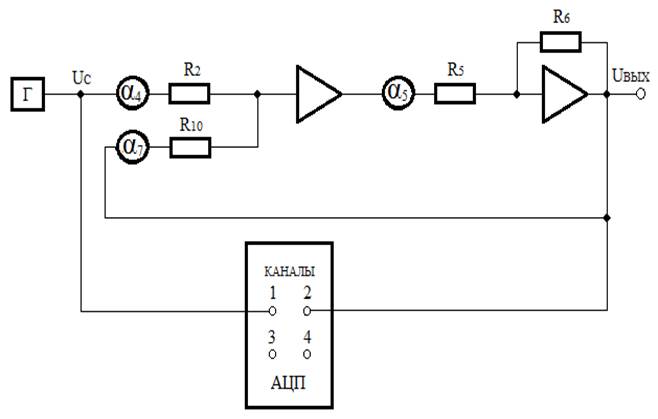
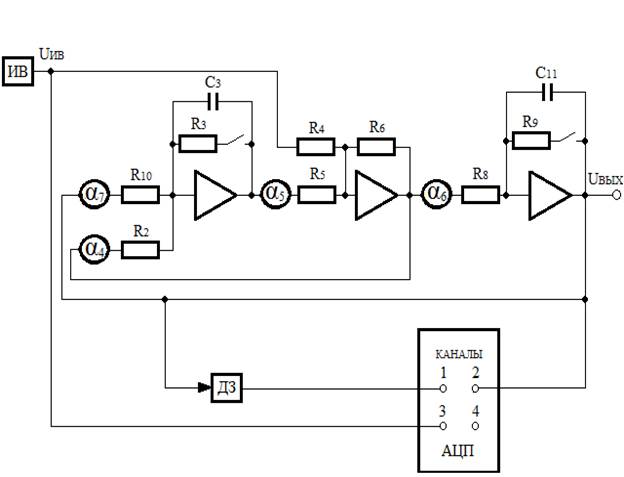
Рисунок 11 - Функционально-принципиальная схема лабораторной установки для исследования формы выходного сигнала неоднозначных нелинейностей
периодической кривой на выходе нелинейного элемента её первой гармоникой. Погрешность, получаемая при такой замене, сравнительно невелика, так как в действительности из-за последующего сглаживающего действия линейной час- ти САУ, являющейся своего рода фильтром низкой частоты, все высокочастот-
ные колебания не пропускаются. Практически они подавляются элементами системы, обладающими инерционностью (например, индуктивностью, емкос-тью, механическими массами и др.).
3.1.2 Гармоническая линеаризация нелинейностей.
Если на вход нелинейного элемента САУ со статической характеристикой F(х) подать синусоидально изменяющийся сигнал с амплитудой А и частотой ω
х = Аsinωt, (1)
то изменение его выходного сигнала будет функцией от х
у = F(х) = F(Аsinωt). (2)
Эта функция, зависящая от статической характеристики нелинейного элемента, может быть представлена в виде аналитической или графической зависимости. Нелинейное выражение (2) после соответствующих вычислений (см. далее) заменяется выражением (описывающей функцией по [5])
у = [q(А) + q´(А) р / ω] х, (3)
где q (А) и q´(А) – коэффициенты гармонической линеаризации.
Эта операция перехода от исходного нелинейного выражения (2) к ли-неаризованному выражению (3) называется гармонической линеаризацией. Коэффициенты q (А) и q´(А) постоянны при постоянной амплитуде А в случае периодического процесса. Для разных амплитуд периодических процессов коэффициенты выражения (3) будут различны по величине. Это является су-щественным отличием гармонической линеаризации от обычного способа линеаризации, приводящего к чисто линейным выражениям.
Применение к (3) линейных методов исследования позволяет анализи-ровать основные свойства нелинейных систем, которые не могут быть обна-ружены при обычной линеаризации.
Передаточную функцию
WН(А, р) = q(А) + q´(А) р / ω (4)
называют передаточной функцией нелинейного звена [1]. После подстановки в (4) р = jω получается выражение
WН(А) = q(А) + jq´(А), (5)
называемое частотной передаточной функцией нелинейного звена [1]. В со-отношении (5) коэффициенты q(А) и q´(А) представляют вещественную и мнимую части. Поэтому q (А) называют вещественным, а q´(А) – мнимым ко-эффициентами гармонической линеаризации [1].
Нелинейное звено после гармонической линеаризации представляется линейным звеном с передаточной функцией (4). Вычисление коэффициентов q(А) и q´(А) основывается на построении графика выходного сигнала нели-нейного звена, когда на его вход подается гармонический сигнал.
Если статическая характеристика нелинейного звена является однознач-ной и симметричной относительно начала координат, то функция F(х) будет нечетной. В этом случае мнимый коэффициент линеаризации q´(А) = 0. Если статическая характеристика нелинейного звена симметрична, но не однознач-на, то мнимый коэффициент гармонической линеаризации не равен нулю. Поэтому нужно вычислять оба коэффициента.
3.2 Рабочее задание
3.2.1 Ознакомиться с конструкцией и техническим описанием стенда «Многоконтурные САУ», функционального генератора типа DEGEM SYS-TEM-141В1, а также с программным обеспечением стенда (см. пункты 1.1.1, 1.1.2 и 2.1.2).
3.2.2 Собрать, опробовать и настроить установку для исследования уси-лительного звена с ограничением выходного напряжения по амплитуде.
На экране монитора ПК получить и зарегистрировать одновременные временные характеристики (осциллограммы) входного UС и выходного UВЫХ сигналов данного звена при различных коэффициентах усиления и величинах ограничения UВЫХmax, UВЫХmin (см. рисунок 5). Сигнал UС генератора исполь-зовать синусоидальной формы различной амплитуды.
3.2.3 Собрать, опробовать и настроить установку для исследования сравнивающего устройства с ограничением выходного напряжения по ампли-туде (компаратора).
На экране монитора ПК получить и зарегистрировать одновременные осциллограммы входного UС и выходного UВЫХ сигналов данного звена при различных величинах ограничения UВЫХmax, UВЫХmin (см. рисунок 6). Сигнал UС генератора использовать синусоидальной формы различной амплитуды.
3.2.4 Собрать, опробовать и настроить установку для исследования ре-лейного звена с гистерезисом и ограничением выходного напряжения по амп-литуде. На экране монитора ПК получить и зарегистрировать одновременные осциллограммы входного UС и выходного UВЫХ сигналов данного звена при различных величинах гистерезиса UГ и ограничения UВЫХmax, UВЫХmin (см. ри-сунок 7). Сигнал UС генератора использовать синусоидальной формы различ-ной амплитуды.
3.2.5 Пользуясь доступной справочной литературой [1, 2, 5] и конспек-том лекций, по полученным одновременным осциллограммам входного и вы-ходного сигналов исследованных звеньев определить их вид, статические ха-рактеристики и вычислить коэффициенты гармонической линеаризации.
3.3 Порядок и методика выполнения лабораторной работы
3.3.1 Собрать схему установки для исследования усилительного звена (см. рисунок 10). Включить резистор R3. Установить α4 = 0,4; α5 = 0,2.
3.3.2 Подать питание 220 В на стенд, ПК и генератор. Запустить программу визуализации и регистрации измеряемых сигналов по п. 1.1.2.
3.3.3 На генераторе установить сигнал UС синусоидальной формы с частотой 0,1 Гц и амплитудой 10 В.
3.3.4 На экране монитора ПК получить и зарегистрировать одновремен-ные осциллограммы сигналов UС и UВЫХ.
3.3.5 Повторить п. 3.3.4 при других значениях α4, например, 0,7 и 1.
3.3.6 Установить α5 = 0,1 и повторить п. 3.3.5 при α4 = 1.
3.3.7 Повторить п. 3.3.4 при других значениях амплитуды сигнала UС, например, 7 и 4 В.
3.3.8 Отключить R3 и повторить пункты 3.3.3, 3.3.4, 3.3.6 и 3.3.7.
3.3.9 Собрать схему установки для исследования релейного звена с гистерезисом (см. рисунок 11).
3.3.10 Установить α4 = α5 = α7 = 0,2 и повторить пункты 3.3.3 и 3.3.4.
3.3.11 Повторить п. 3.3.10 при других значениях α7, например, 0,4 и 0,6.
3.3.12 Повторить п. 3.3.10 при α5 = 0,1.
3.3.13 Повторить п. 3.3.10 при других значениях амплитуды сигнала UС, например, 7 и 4 В.
3.4 Результаты работы и содержание отчета
Оформить в соответствии с фирменным стандартом подробный отчет с вычерчиванием собранных схем, с представлением полученных осцилло-грамм, с выполнением пункта 3.2.5 рабочего задания и написанием выводов.
3.5 Контрольные вопросы
1. Основная идея метода гармонической линеаризации.
2. Почему метод гармонической линеаризации приближенный?
3. Сравнить методы гармонической линеаризации и фазовой плоскости.
4. Что позволяет определить метод гармонической линеаризации?
5. Охарактеризуйте гармоническую линеаризацию нелинейностей.
6. Охарактеризуйте обычную линеаризацию нелинейностей.
7. Передаточная функция нелинейного звена.
8. Частотная передаточная функция нелинейного звена.
9. Понятие коэффициентов гармонической линеаризации.
10. Вещественные и мнимые коэффициенты гармонической линеариза-ции нелинейностей.
11. Как вычисляются коэффициенты гармонической линеаризации?
12. Свойство фильтра линейной части нелинейной САУ.
13. Гармоническая линеаризация нелинейных звеньев без гистерезиса.
14. Гармоническая линеаризация нелинейных звеньев с гистерезисом.
15. Зависимость коэффициентов гармонической линеаризации от амп-литуды и частоты периодических процессов.
16. Симметричные колебания нелинейного звена.
17. Когда мнимый коэффициент гармонической линеаризации нулевой?
18. На чем основан расчет коэффициентов гармонической линеариза-ции нелинейностей?
19. При гармоническом входном сигнале построить временные диаграм-мы выходного сигнала нелинейного устройства с заданной преподавателем СХ.
4 Лабораторная работа. Фазовые портреты САУ
Цель работы: приобрести навыки экспериментального исследования фазовых траекторий и закрепить понятия, применяемые при изучении нели-нейных систем методом фазовой плоскости.
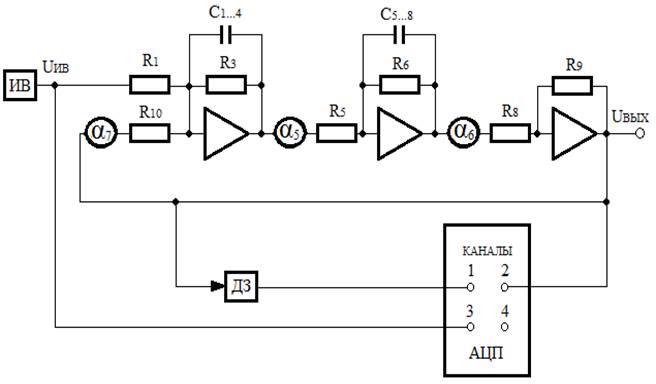
Оборудование (см. рисунки 12 и 13): установленные в настольном стенде «Многоконтурные САУ» регулируемый стабилизированный двухпо-лярный источник (ИВ) напряжения UИВ с встроенным стрелочным вольтмет-ром; выполненная на интегральных операционных усилителях трехзвенная модель объекта управления (МОУ); дифференциатор (Д3); четырехканальный АЦП и настольный ПК с программным обеспечением, позволяющие измерять и регистрировать одновременно четыре сигнала с построением графиков их функциональных зависимостей. Более подробное описание лабораторного оборудования приведено в подразделе 1.1, а общие сведения об операцион-ных усилителях даны в приложении А.
Рисунок 12 – Функционально-принципиальная схема лабораторной установки для исследования устойчивых устройств
Коэффициенты передачи потенциометров МОУ α4 - α7 с помощью уста-новочных ручек регулируются в пределах 0…1. Резисторы и конденсаторы имеют следующие номинальные значения:
R1 = R3 = R4 = R6 = R7 = R9 = R10 = 1 Мом; R2 = R5 = R8 = 200 кОм;
С1 = С5 = С9 = 4,7 мкФ; С2 = С6 = С10 = 1 мкФ;
С3 = С7 = С11 = 0,47 мкФ; С4 = С8 = С12 = 0,22 мкФ.
Исходя из данных значений сопротивлений R резисторов и емкостей С конденсаторов, в передаточной функции МОУ можно получить значения пос- тоянных времени Т = RС, указанные в таблице 1.
Рисунок 13 – Функционально-принципиальная схема лабораторной установки для исследования неустойчивых устройств
4.1 Краткие теоретические сведения
4.1.1 Изображение процессов на фазовой плоскости.
Если уравнения САУ представлены в нормальной форме, то вектор со-стояния системы однозначно определяет ее состояние. Каждому состоянию системы в пространстве состояний соответствует точка. Точка, соответству-
ющая текущему состоянию системы, называется изображающей точкой. При
изменении состояния изображающая точка описывает траекторию. Эта траек-тория называется фазовой траекторией. Совокупность фазовых траекторий, соответствующая всевозможным начальным условиям, называется фазовым портретом [1, 2]. Наглядно фазовую траекторию и фазовый портрет можно представить в случае двухмерного фазового пространства. Двухмерное фа-зовое пространство называется фазовой плоскостью.
Т а б л и ц а 1
|
№ |
Комбинация С1…4 конденсаторов |
Комбинация С5…8 конденсаторов |
Комбинация С9…12 конденсаторов |
Т = RС, с |
|
1 |
С4 |
С8 |
С12 |
0,22 |
|
2 |
С3 |
С7 |
С11 |
0,47 |
|
3 |
С3 + С4 |
С7 + С8 |
С11 + С12 |
0,69 |
|
4 |
С2 |
С6 |
С10 |
1,0 |
|
5 |
С2 + С4 |
С6 + С8 |
С10 + С12 |
1,22 |
|
6 |
С2 + С3 |
С6 + С7 |
С10 + С11 |
1,47 |
|
7 |
С2 + С3 + С4 |
С6 + С7 + С8 |
С10 + С11 + С12 |
1,69 |
|
8 |
С1 |
С5 |
С9 |
4,7 |
|
9 |
С1 + С4 |
С5 + С8 |
С9 + С12 |
4,99 |
|
10 |
С1 + С3 |
С5 + С7 |
С9 + С11 |
5,17 |
|
11 |
С1 + С3 + С4 |
С5 + С7 + С8 |
С9 + С11 + С12 |
5,39 |
|
12 |
С1 + С2 |
С5 + С6 |
С9 + С10 |
5,7 |
|
13 |
С1 + С2 + С4 |
С5 + С6 + С8 |
С9 + С10 + С12 |
5,92 |
|
14 |
С1 + С2 + С3 |
С5 + С6 + С7 |
С9 + С10 + С11 |
6,17 |
|
15 |
С1 + С2 + С3 + С4 |
С5 + С6 + С7 + С8 |
С9 + С10 + С11 + С12 |
6,39 |
Фазовая плоскость – это координатная плоскость, в которой по осям ко-
ординат откладываются две переменные (фазовые координаты), однозначно определяющие состояние системы второго порядка. Метод анализа и синтеза
САУ, основанный на построении фазового портрета, называют методом фа-зовой плоскости.
Часто при изображении процессов на фазовой плоскости за фазовую ко-ординату х2, которую откладывают по оси ординат, принимают производную координаты х1, откладываемой по оси абсцисс. В этом случае фазовые траек-тории обладают следующими свойствами.
В верхней полуплоскости изображающая точка движется слева напра-во, так как х2 > 0 и х1 возрастает. В нижней полуплоскости, наоборот, изобра-жающая точка движется справа налево, так как х2 < 0 и х1 убывает. Поэтому фазовые траектории пересекают ось абсцисс под прямым углом.
По фазовому портрету можно судить о характере переходных процес-сов. В частности, по фазовой траектории можно построить без расчетов каче-ственно временную характеристику – кривую зависимости х1 от времени, и, наоборот, по временной характеристике можно построить без расчетов качес-твенно фазовую траекторию.
Фазовые портреты нелинейных систем характеризуются большим раз-
нообразием, чем фазовые портреты линейных систем. Однако типы особых
точек линейных и нелинейных систем совпадают. Здесь имеются в виду те особые точки, в окрестностях которых уравнения нелинейных систем допус-кают линеаризацию.
4.1.2 Схемы электронных моделей.
Лабораторная работа выполняется на электронных моделях (см. рисун-ки 12 и 13), которые реализуются на элементах вышеупомянутой МОУ. Пред-ставленная на рисунке 12 схема позволяет исследовать типовые звенья второ-го порядка: апериодическое, колебательное и консервативное. Данная схема применяется в генераторах синусоидальных колебаний без стабилизации их амплитуды.
Представленная на рисунке 13 схема позволяет исследовать типовое не-устойчивое колебательное звено с отрицательным затуханием, имеющего пе-редаточную функцию [2]
W(р) = К /(Т2р2 - 2ξТр +1). (6)
Данная схема применяется в генераторах синусоидальных колебаний с
простейшей стабилизацией их амплитуды за счет положительной обратной
связи (ПОС), компенсирующей затухание. Жесткой ПОС, регулируемой по-тенциометром α4, здесь охвачен интегратор первого звена. Значение α4 под-бирается экспериментально. Для предотвращения перекомпенсации к упо-мянутому интегратору подключается схема ограничения по амплитуде.
4.2 Рабочее задание
4.2.1 Ознакомиться с конструкцией, техническим описанием и програм-мным обеспечением стенда «Многоконтурные САУ» (см. подраздел 1.1).
4.2.2 Собрать, опробовать и настроить модель колебательного звена.
4.2.3 Собрать и настроить аппаратуру для получения осциллограмм и фазовых траекторий.
4.2.4 Для ряда значений постоянной времени исследуемого звена снять переходные процессы его выходного сигнала UВЫХ и соответствующие фазо-вые траектории dUВЫХ / dt = f (UВЫХ) при отключении UИВ.
4.2.5 Собрать, опробовать и настроить модель консервативного звена. Повторить п. 4.2.4.
4.2.6 Собрать, опробовать и настроить модель неустойчивого колеба-тельного звена с отрицательным затуханием. Повторить п. 4.2.4.
4.2.7 Определить особые точки и линии полученных фазовых траекто-рий и их тип. На полученных осциллограммах и фазовых траекториях отме-тить взаимосвязанные характерные точки.
Проанализировать влияние величины постоянной времени на переход-ные процессы и фазовые траектории.
4.3 Порядок и методика выполнения лабораторной работы
4.3.1 Собрать схему установки для исследования колебательного звена (см. рисунок 12). Установить α5 = α6 = α7 = 1. В обратных связях операцион-ных усилителей включить конденсаторы С4, С8 и резисторы R3, R6 , R9.
4.3.2 Подать питание 220 В на стенд и ПК. Включить ИВ и выставить UИВ = - 10 В. Запустить программу визуализации и регистрации измеряемых сигналов по п. 1.1.2.
4.3.3 Зарегистрировать одновременные переходные процессы сигналов dUВЫХ / dt, UВЫХ, UИВ и фазовые траектории dUВЫХ / dt = f (UВЫХ) при отклю-чении UИВ.
Для получения на мониторе добротных изображений подбираются ко-эффициент усиления К дифференциатора Д3, диапазоны каналов АЦП, число измерений на осциллограммах и время между измерениями.
Обратите внимание на скорость, частоту вращения и направление дви-жения изображающей точки на фазовой плоскости.
4.3.4 Повторить п. 4.3.3 при использовании в обратных связях операци-онных усилителей конденсаторов С3 и С7, С2 и С6, С1 и С5.
4.3.5 Отключить резистор R3 и повторить пункты 4.3.3 и 4.3.4.
4.3.6 Собрать схему для исследования консервативного звена. Для этого дополнительно к пунктам 4.3.1 и 4.3.2 (конденсаторы С4, С8 ) отключается сначала резистор R6, а после затухания колебаний в сигнале UВЫХ отключает-ся и резистор R3. После этого повторить п. 4.3.3.
4.3.7 Установить UИВ = - 5 В, включить R3, R6 и повторить п. 4.3.6.
4.3.8 Повторить пункты 4.3.6 (UИВ = - 10 В) и 4.3.7 (UИВ = - 5 В) при использовании в обратных связях операционных усилителей конденсаторов С3 и С7, С2 и С6, С1 и С5.
4.3.9 Собрать схему для исследования колебательного звена с отрица-тельным затуханием (см. рисунок 13).
4.3.10 Установить α4 = 0; α5 = α6 = α7 = 1. Привести интеграторы в ис-ходное состояние, включив на 3…5 с резисторы R3 и R9.
4.3.11 Увеличить α4 с 0 до 0,1. Зарегистрировать одновременные пере-ходные процессы сигналов dUВЫХ / dt, UВЫХ, UИВ и фазовые траектории dUВЫХ / dt = f (UВЫХ) при ступенчатом увеличении UИВ с 0 до 3 В.
Обратите внимание на прекращение роста амплитуды колебаний UВЫХ.
4.3.12 Вместо конденсаторов С3 и С11 включить конденсаторы С4 и С12. Повторить пункты 4.3.10 и 4.3.11.
4.4 Результаты работы и содержание отчета
Оформить в соответствии с фирменным стандартом подробный отчет с вычерчиванием собранных схем, с представлением полученных осцилло-грамм и фазовых портретов, с выполнением пункта 4.2.7 рабочего задания и написанием выводов.
4.5 Контрольные вопросы
1. Передаточная функция устройства на рисунке 12.
2. Передаточная функция устройства на рисунке 13.
3. Направление движения изображающей точки на фазовых траекториях.
4. Под каким углом фазовые траектории пересекают ось абсцисс?
5. Почему в теории нелинейных САУ рассматриваются фазовые траекто-рии линейных САР?
6. Почему в данной лабораторной работе исследуются устройства не вы-ше второго порядка?
7. Охарактеризуйте метод фазовой плоскости.
8. Передаточная функция дифференциатора Д3.
9. Как получают осциллограммы?
10. Типы фазовых портретов устойчивых линейных систем.
11. Типы фазовых портретов неустойчивых линейных систем.
12. Фазовые траектории системы при комплексных корнях ее характерис-тического уравнения второго порядка.
13. Фазовые траектории системы при вещественных корнях ее характе-ристического уравнения второго порядка.
14. Понятие особых точек фазовых портретов.
15. Причины ограничения колебаний сигнала UВЫХ при выполнении пунк-тов 4.3.11 и 4.3.12.
16. Понятие устойчивого предельного цикла.
17. Понятие неустойчивого предельного цикла.
18. Особые отрезки на фазовой плоскости.
19. По заданной преподавателем переходной характеристике построить соответствующую ей фазовую траекторию.
20. По заданной преподавателем фазовой траектории построить соответ-ствующую ей переходную характеристику.
Приложение А
Общие сведения об операционных усилителях
Операционный усилитель (ОУ) был создан для выполнения математичес-ких операций в аналоговых вычислительных машинах. Первый ламповый ОУ К2W был разработан в 1942 году Л. Джули (США). Он содержал два двойных электровакуумных триода. Первые ОУ представляли собой громоздкие и доро-гие устройства. С заменой ламп транзисторами операционные усилители стали меньше, дешевле, надежнее и сфера их применения расширилась.
Первые операционные усилители на транзисторах появились в продаже в 1959 году. Р. Малтер (США) разработал ОУ Р2, включавший семь германиевых транзисторов и варикапный мостик. Требования к увеличению надежности, улучшению характеристик, снижению стоимости и размеров способствовали развитию интегральных микросхем. Первый интегральный ОУ μА702 (отечест-венный аналог – 140УД1), имевший рыночный успех, был разработан Робертом Видларом в 1963 году. Этот усилитель имел низкий коэффициент усиления, большие входные токи и несимметричный выход (разное выходное сопротивле-ние для положительной и отрицательной полуволн выходного сигнала). Через два года Р. Видлар разработал усилитель μА709, трехкаскадный с большим ко-эффициентом усиления и симметричным выходом, но сложной схемой коррек-ции частотной характеристики (отечественный аналог – 153УД1). Усилитель μА709 нашел широкое распространение в массовой аналоговой аппаратуре об-работки данных. Ежегодный мировой выпуск этой ИМС оценивался в 1970 г. на уровне 20…30 млн. шт. Решениями, примененными в этом ОУ, была в значи-тельной мере подготовлена схемотехническая база для следующих поколений операционных усилителей.
В 1967 – 1968 годах Р. Видлар разработал двухкаскадный ОУ LМ101 и его усовершенствованный вариант LМ101А (отечественные аналоги соответс-твенно153УД2 и 153УД6). Эти усилители явились настоящим прорывом в ана-логовой интегральной схемотехнике. Для них характерны простая схема час-тотной коррекции (всего один конденсатор), высокий коэффициент усиления (до 150000) и малые входные токи (особенно у LМ101А). Усилители LМ101 и LМ101А в отличие от μА709 не требовали внешних цепей защиты входа и вы-хода, что весьма упрощало их применение.
В настоящее время номенклатура ОУ насчитывает сотни наименований. Операционные усилители выпускаются в малогабаритных корпусах и очень де-шевы, что способствует их массовому распространению.
Операционные усилители представляют собой усилители постоянного тока с высоким коэффициентом усиления, диференциальным входом и малыми значениями напряжения смещения и входных токов.
По размерам и цене ОУ общего применения практически не отличаются от отдельного транзистора. В то же время преобразование сигнала схемой на ОУ почти исключительно определяется свойствами цепей внешних обратных связей и отличается высокой стабильностью и воспроизводимостью. Кроме того, благодаря практически идеальным характеристикам ОУ реализация раз-личных функциональных схем на их основе оказывается значительно проще, чем на дискретных транзисторах. Поэтому операционные усилители стали сегодня основой элементной базы (своего рода «кирпичиками») во многих областях аналоговой схемотехники [2 - 5, 12, 15 – 19].
Чтобы обеспечить возможность работы операционного усилителя как с положительными, так и с отрицательными входными сигналами, следует ис-пользовать двухполярное напряжение питания. Для этого нужно предусмотреть два источника постоянного напряжения, которые подключаются к соответству-ющим внешним выводам ОУ. Чаще всего интегральные операционные усилите-ли рассчитаны на напряжение питания ± 15 В, хотя существуют немало моде-лей, которые питаются от источников как существенно большего, так и заметно меньшего напряжения. Рассматривая схемы на ОУ, выводы питания, как прави-ло, не указываются.
Наконец, очень важное обстоятельство: операционный усилитель почти всегда охвачен глубокой отрицательной обратной связью (ООС), свойства ко-торой и определяют свойства схемы с ОУ. Коэффициент усиления схемы с ООС в основном определяется свойствами внешней цепи обратной связи и практически не зависит от параметров самого усилителя. В простейшем случае цепь обратной связи представляет собой резистивный делитель напряжения. При этом схема с ОУ работает как линейный усилитель, коэффициент усиления которого определяется только коэффициентом ослабления цепи обратной связи. Если в качестве цепи обратной связи применяется RС-цепь, то образуется ак-тивный фильтр. Наконец, включение в цепь обратной связи ОУ диодов и тран-зисторов позволяет реализовать с высокой точностью нелинейные преобразова-ния сигналов.
Операционные усилители являются одним из широко используемых элементов схемотехнических построений электронных цепей генерирования, усиления и частотной фильтрации сигналов, выполнения над ними практи-чески любых математических операций, создания устройств согласования трактов с различающимися входными и выходными сопротивлениями и ряда других функциональных звеньев линейного и нелинейного преобразования аналоговых сигналов.
В современной электронике под операционными усилителями понима-ют особый класс микроэлектронных устройств, обладающих высоким (поряд-ка 105…107) собственным усилением, в том числе и на постоянном токе, очень большим входным сопротивлением и очень малым выходным. По свое-му схемному построению ОУ является усилителем постоянного тока, выпол-ненным по дифференциальной схеме, так что в целом ОУ имеет два входа – инвертирующий и неинвертирующий.
Очень полезно овладеть достаточно простыми приемами ручного ана-лиза электронных схем на основе ОУ. Это значительно облегчит понимание принципа действия конкретных автоматических устройств и будет способст-вовать получению достоверных результатов их машинного анализа [16].
Список литературы
1. Ким Д.П. Теория автоматического управления. В 2-х т. Т.2. Многомер-ные, нелинейные, оптимальные и адаптивные системы. – М.: ФИЗМАТЛИТ, 2007. – 440 с.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического управ-ления. – СПб.: Изд-во «Профессия», 2004. – 752 с. - (Серия: Специалист).
3. Теория автоматического управления: учеб. пособие / Под ред. В.И. Ла-чина. – Ростов н /Д: Феникс, 2007. - 469 с. – (Высшее образование).
4. Гайдук А.Р., Беляев В.Е., Пьявченко Т.А. Теория автоматического уп-равления в примерах и задачах с решениями в МАТLАВ: Учебное пособие. - СПб.: Издательство «Лань», 2011. – 464 с. – (Учебники для вузов).
5. Шишмарев В.Ю. Основы автоматического управления: учеб. пособие для студентов вузов. – М.: Издательский центр «Академия», 2008. – 352 с.
6. Теория автоматического управления: Учеб. для вузов / Под ред. В.Б. Яковлева. – М.: Высшая школа, 2009. – 567 с.
7. Гальперин М.В. Автоматическое управление: учебник. – М.: ИД «ФО-РУМ»: ИНФРА-М, 2007. – 224 с. – (Профессиональное образование).
8. Малафеев С.И., Малафеева А.А. Основы автоматики и системы авто-матического управления: учебник для студентов высш. учеб. заведений. – М.: Издательский центр «Академия», 2010. – 384 с.
9. Певзнер Л.Д. Практикум по теории автоматического управления: Учеб. пособие. - М.: Высш. шк., 2006. – 590 с.
10. Юревич Е.И. Теория автоматического управления. – СПб.: БХВ-Пе-тербург, 2007. – 560 с.
11. Петрова А.М. Автоматическое управление: учебное пособие. – М.: ФОРУМ, 2010. – 240 с. - (Профессиональное образование).
12. Нефедов В.И. Основы радиоэлектроники и связи: Учебник для вузов. – М.: Высш. шк., 2005. – 510 с.
13. Метрология и электрорадиоизмерения в телекоммуникационных си-стемах. Учебное пособие / Под общей редакцией Б.Н. Тихонова. – М.: Горячая линия-Телеком, 2012. – 360 с.
14. Дьяконов В.П. Генерация и генераторы сигналов. – М.: ДМК Пресс, 2009. – 384 с.
15. Волович Г.И. Схемотехника аналоговых и аналого-цифровых элек-тронных устройств. – М.: Издательский дом «Додэка-XXI», 2005. - 528 с.
16. Лачин В.И., Савелов Н.С. Электроника: учеб. пособие. – Ростов н/Д: Феникс, 2009. – 703 с.
17. Электроника и микропроцессорная техника: учебник / Под ред. Г.Г. Раннева. – М.: - Издательский центр «Академия», 2012. – 368 с.
18. Павлов В.Н. Схемотехника аналоговых электронных устройств: учеб. пособие для студ. вузов. – М.: Издательский центр «Академия», 2008. – 288 с.
19. Хоровиц П., Хилл У. Искусство схемотехники: Пер. с англ. – М.: Мир, БИНОМ, 2010. – 704 с.
Сводный план 2014 г., поз. 107
Борис Алексеевич Чернов
НЕЛИНЕЙНЫЕ
СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Методические указания по выполнению лабораторных
работ
для студентов специальности 5В070200
Редактор Л.Т. Сластихина
Специалист по стандартизации Н.К. Молдабекова
Подписано
в печать ________
Формат
60х84 1/16
Тираж
100 экз.
Бумага
типографская №1
Объем
2,2 уч.-изд. л.
Заказ _____
Цена 1100 тг.
Копировально-множительное бюро
некоммерческого акционерного общества
«Алматинский университет энергетики и связи»
050013, Алматы, Байтурсынова, 126