Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра
промышленной теплоэнергетики
Теория
автоматического управления
и системы автоматического управления
теплотехнологическими процессами
теплоэнергетики
Методические указания к
выполнению лабораторных работ
для студентов специальности
5В071700 - Теплоэнергетика
Алматы 2014
СОСТАВИТЕЛИ: Н.К. Бекалай, Н.О. Джаманкулова. Теория автоматического управления и системы автоматического управления теплотехнологическими процессами теплоэнергетики. Методические указания к выполнению лабораторных работ для студентов специальности 5В071700 – Теплоэнергетика. - Алматы: АУЭС, 2013. - 29 с.
Методические указания содержат основные требования к выполнению лабораторных работ, структурные схемы реализации типовых звеньев и задания для проведения лабораторных работ.
Ил. 25, библиогр. – 12 назв.
Рецензент: канд. техн. наук, доц. М.Е. Туманов
Печатается по плану издания Некоммерческого акционерного общества "Алматинский университет энергетики и связи" на 2013 г.
© НАО "Алматинский университет энергетики и связи", 2014 г
Исследование динамических характеристик и моделирование типовых линейных звеньев и линейных регуляторов
1 Лабораторная работа № 1. Исследование динамических характеристик типовых линейных звеньев
1.1 Назначение лабораторной работы
1.1.1 Ознакомление с динамическими характеристиками типовых звеньев автоматического регулирования (управления).
1.1.2 Ознакомление с основными типами линейных законов регулирования, используемых в системах автоматического управления технологических установок.
1.2 Теоретическое введение
Система автоматического регулирования и отдельные ее элементы все время работают в переходных режимах, и поэтому необходимо знать их динамические свойства. Основными характеристиками элементов систем регулирования являются дифференциальные уравнения, которые во многих случаях можно линеаризовать и свести их к линейным дифференциальным уравнениям с постоянными коэффициентами. При этом оказывается, что, несмотря на большое разнообразие конструктивных форм отдельных элементов и выполняемых ими функций, многие из них описываются одинаковыми дифференциальными уравнениями. Поэтому можно провести унификацию отдельных элементов и представить их с помощью типовых звеньев систем автоматического регулирования.
Типовым линейным звеном называют устройство, динамические свойства которого характеризуются дифференциальным уравнением не выше второго порядка. Более сложные звенья, описываемые дифференциальными уравнениями третьего порядка и выше, могут быть введены к комбинациям типовых звеньев.
В качестве координаты, характеризующей состояние звена, обычно принимают выходную величину. Эта координата входит в уравнение звена в качестве зависимой переменной и в общем случае представляет собой функцию входной величины и времени. Дифференциальные уравнения звеньев в общем виде имеют вид:
D(Р)Хвых= ±КN(Р)Хвх , (1.1)
где К - постоянная величина, называемая передаточным коэффициентом.
D(Р)), К(Р)- функции оператора, как правило, полиномы. Степень полинома D(Р) выше степени полинома К(Р).
Правая часть уравнения показывает, какие величины подаются на вход и с каким усилением эти величины передаются на выход звена. Левая часть уравнения дает закон, определяющий характер переходного процесса, т.е. показывает, как реагирует звено на входное воздействие.
Передаточный коэффициент К характеризует статические свойства звена, он определяет наклон статической характеристики
К= Хвых / Хвх. при ![]() . (1.2)
. (1.2)
Динамические свойства звеньев удобно представлять в виде передаточной функции W(P), определяемой как отношение изображения выходной величины к изображению входной:
 . (1.3)
. (1.3)
При нулевых начальных условиях передаточная функция звена определяется отношением координаты звена к величине воздействия на звено:
 .
(1.4)
.
(1.4)
Передаточные функции широко используются при анализе и синтезе систем автоматического регулирования как средство упрощения методики исследования, рассматриваемых систем в переходных режимах.
Данная работа преследует цель изучения динамических характеристик как отдельных типовых звеньев, имеющих большое распространение в системах автоматического регулирования энергетических агрегатов, так и идеальных регуляторов, которые могут быть представлены в виде цепочки, состоящей из нескольких типовых звеньев.
1.3 Порядок выполнения работы
Лабораторная работа для изучения динамических характеристик типовых звеньев и их соединений проводится на электронных аналоговых машинах МН-7 или МН-10. Лабораторная работа состоит из 8 упражнений, каждое из которых выполняется по общей методике следующим образом:
1) В соответствии со структурной схемой данного опыта на коммутационной панели аналоговой машины набирается требуемый элемент.
2) Установка коэффициента усиления К и постоянной времени интегрирования Т осуществляется потенциометром Rх с помощью вольтметра, подключенного к выходу соответствующего элемента. При этом на выход исходного элемента подается напряжение от делителя напряжения или же от источника постоянного напряжения.
3) С помощью делителя напряжения устанавливается величина входного сигнала. Для этого соединяют гнездо Uвых (Хвых) с гнездом
U- вольтметра и поворотом ручки делителя напряжения устанавливают по вольтметру требуемое напряжение входного сигнала. Присоединив гнездо требуемой точки схемы, при нажатии кнопки "пуск" в исследуемую схему будет подано ступенчатое возмущение установленной величины.
4) Одно из выходных гнезд выбранной схемы соединяется с гнездом вольтметра.
5) Нажатием кнопки "пуск" на панели управления подается ступенчатый сигнал на вход исследуемой схемы. Через каждые 1-3 секунды сигнал останавливается нажатием кнопки "останов." и фиксируется выходной сигнал по вольтметру.
6) По окончании переходного процесса или по достижении выходным сигналом величины 95В для МН-7, 24В для МН-10 (по вольтметру) нажать кнопку "исходное положение".
7) При изменении параметров элемента или величины входного сигнала необходимо повторить (в соответствии с заданием на работу) в каждом случае определение кривых с пункта 2 или 3.
1.4 Схема набора на аналоговой машине исследуемых звеньев, их статические и динамические характеристики
1.4.1 Пропорциональное звено.
Звено называется пропорциональным, если входная и выходная его величины пропорциональны друг другу, т.е. если связь между ними может быть записана так:
Хвых= КХвх . (1.5)
Разгонная характеристика пропорционального звена приведена на рисунке 1.1.
Передаточная функция пропорционального звена является постоянной величиной и равна его передаточному коэффициенту:
W(P) = Хвых /Хвх = К. (1.6)
Условные обозначения пропорционального звена на структурных схемах приведены на рисунке 1.2.
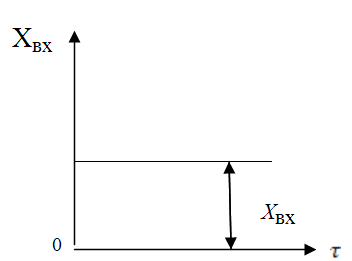
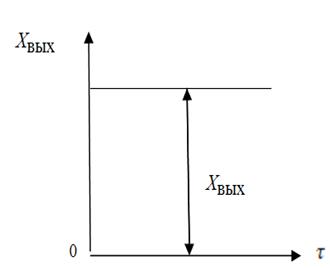
Рисунок 1.1
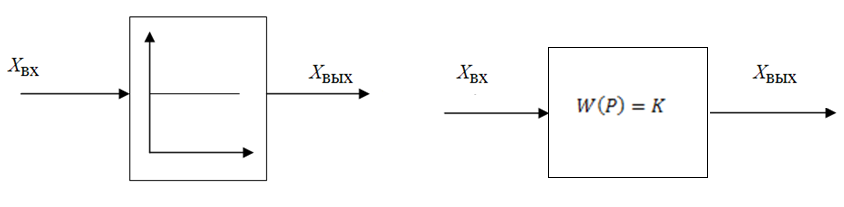
Рисунок 1.2
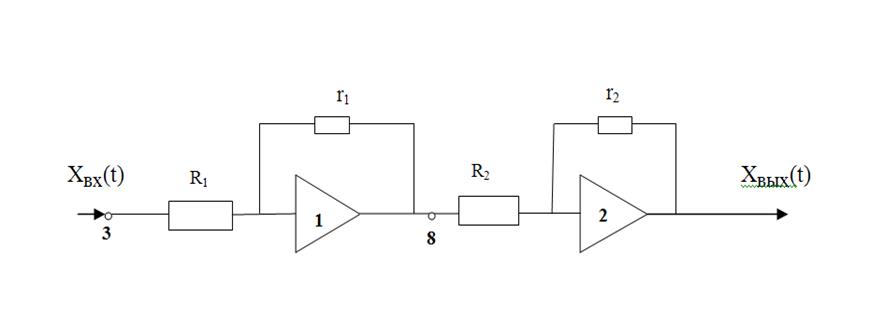
Рисунок 1.3
Схема набора пропорционального звена приведена на рисунке 1.3. При наборе звена коэффициент К подбирается сопротивлением до тех пор, пока напряжение на выходе усилителя не будет в К раз отличаться от напряжения, поданного на вход в режиме ''подготовка". Исходные данные для снятия переходных характеристик пропорционального звена даны в таблице Т-1 приложения А.
1.4.2 Интегрирующее звено.
Звено называется интегрирующим, если скорость изменения его выходной величины пропорциональна входной величине.
Дифференциальное уравнение интегрирующего звена:
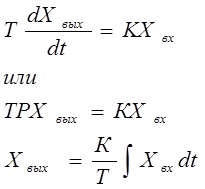 (1.7)
(1.7)
При ступенчатом возмущении разгонная характеристика интегрирующего звена приведена на рисунке 1.4.
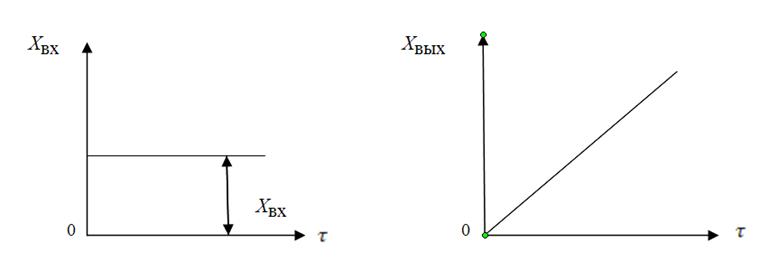
Рисунок 1.4
Передаточная функция интегрирующего звена может быть представлена таким соотношением:
W(P) = Хвых /Хвх = К/Tp или W(P) = К/p. (1.8)
Условные обозначения интегрирующего звена на структурных схемах приведены на рисунке 1.5.

Рисунок 1.5
На рисунке 1.6 представлена схема набора интегрирующего звена.
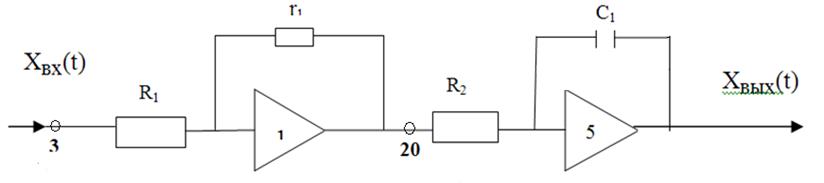
Рисунок 1.6
Передаточный коэффициент К=1/T, где Т–постоянная интегрирования. Установка его осуществляется изменением сопротивления до тех пор, пока на выходе напряжение не будет в К раз отличаться от входного в режиме "подготовка". Исходные данные для снятия переходных характеристик даны в таблице Т-2 приложения А.
1.4.3 Апериодическое звено.
Звено называется апериодическим или инерционным первого порядка, если его входная и выходная величины связаны между собой дифференциальным уравнением:
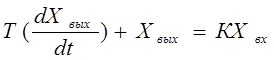 (1.9)
(1.9)
или
(Тр +1) Хвых = КХвх . (1.10)
Переходная функция апериодического звена определяется выражением
Хвых = КХвх (1– ![]() ). (1.11)
). (1.11)
Ей соответствует разгонная характеристика, изображенная на рисунке 1.7.
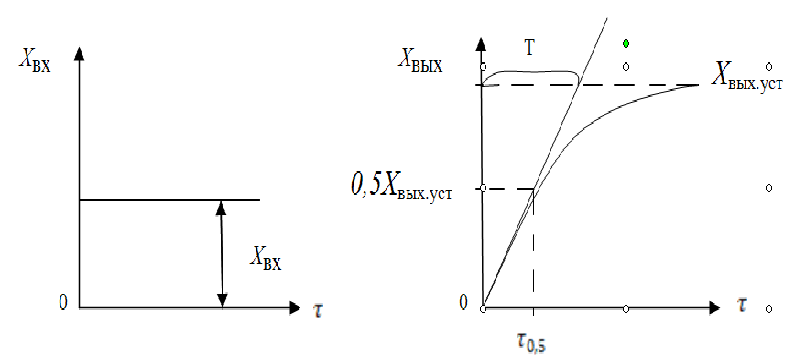
Рисунок 1.7
Здесь ![]() - коэффициент усиления звена; Т
- постоянная времени звена, определяемая отрезком линии Хвых.уст,
отсекаемой касательной, проведенной к наиболее крутому участку графика
переходной функции. Более точно постоянная времени может быть определена по
времени "полувыб." (см. рисунок 1.7)
- коэффициент усиления звена; Т
- постоянная времени звена, определяемая отрезком линии Хвых.уст,
отсекаемой касательной, проведенной к наиболее крутому участку графика
переходной функции. Более точно постоянная времени может быть определена по
времени "полувыб." (см. рисунок 1.7)
![]() . (1.12)
. (1.12)
Передаточная функция апериодического звена представляется соотношением:
W(P) = Хвых /Хвх = К/(Tp+1). (1.13)
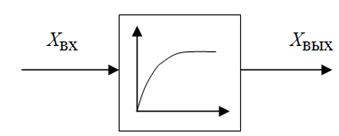
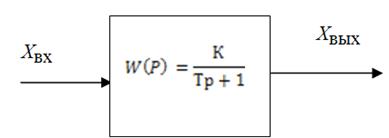
Рисунок 1.8
На рисунке 1.8 приведены обозначения апериодического звена в структурных системах, схема набора звена приведена на рисунке 1.9.
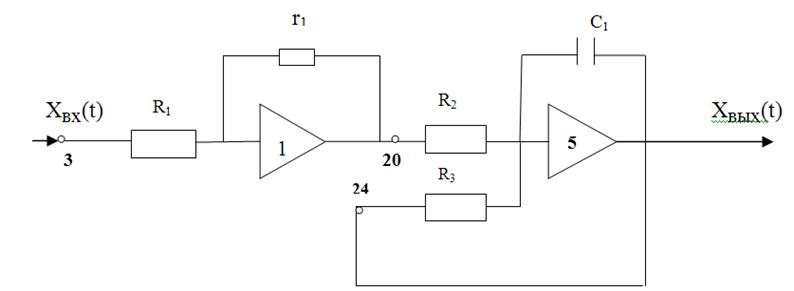
Рисунок 1.9
Установку коэффициента усиления К в данном случае удобно осуществить с помощью сопротивления R1, а постоянную времени звена Т-сопротивлениями R2 и R3, причем величина их определяется коэффициентом усиления:
![]() .
(1.14)
.
(1.14)
Исходные данные для нахождения переходных характеристик даны в таблице Т-3 приложения А.
1.4.4 Реальное дифференцирующее звено.
Звено носит название реального дифференцирующего, если его входная и выходная реального дифференцирующего величины связаны между собой дифференциальным уравнением:

 . (1.15)
. (1.15)
или
(Тр+1) Хвых = КрХвх. (1.16)
Переходная функция реального дифференцирующего звена определяется:
Хвых
= КХвх![]() . (1.17)
. (1.17)
Переходная характеристика представлена на рисунке 1.10.
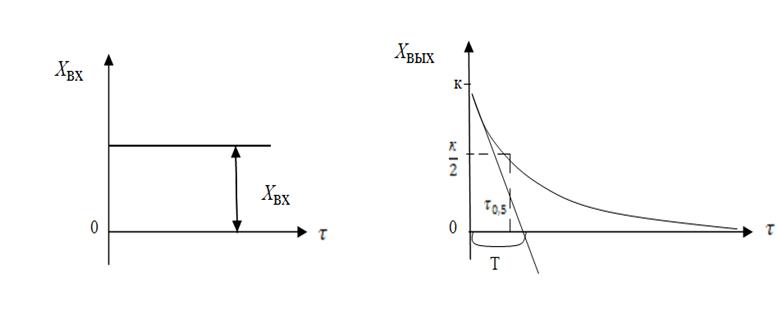
Рисунок 1.10
Здесь ![]() - коэффициент усиления звена;
- коэффициент усиления звена;
Т- постоянная времени дифференцирующего звена, определяемая на линии Xвых =0, отсекаемая касательной на графике переходной функции при τ=0. Более точно величину Т можно определить по выражению (см. рисунок 1.10):
![]() . 1.18
. 1.18
Передаточная функция реального дифференцирующего звена представляется соотношением:
W(P) = Хвых /Хвх = Кр/(Tp+1). (1.19)
На рисунке 1.11 приведены условия изображения дифференцирующего звена в структурных схемах:
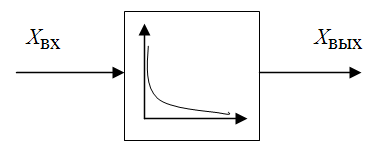
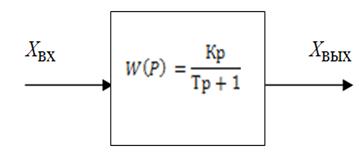
Рисунок 1.11
На рисунке 1.12 представлена схема набора реального дифференцирующего звена.
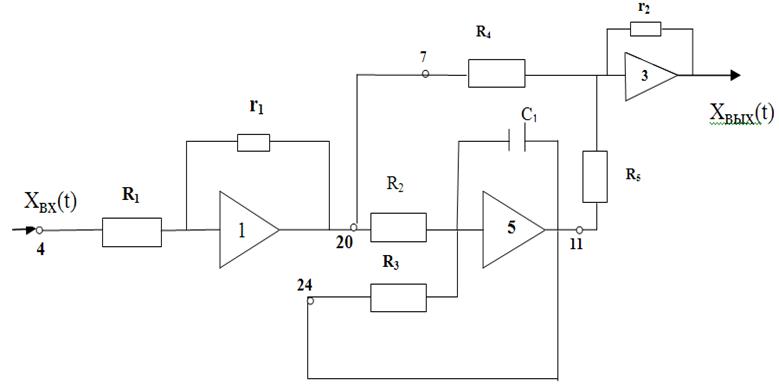
Рисунок 1.12
Установка усиления коэффициента К звена в данном случае осуществляется с помощью сопротивления R1, а постоянная времени дифференцирования Т с помощью сопротивлений R2 и R3, причем величина их определяется коэффициентом усиления КR2
![]() . (1.20)
. (1.20)
1.4.5 Колебательное звено.
Колебательным называют звено, в котором при ступенчатом изменении входной величины выходная величина стремится к новому установившемуся значению, совершая относительно его колебания, с амплитудой затухающей по закону экспоненты.
Дифференциальное уравнение звена:
 КХвх (1.21)
КХвх (1.21)
или
(T02 p2 + Тр+1) Хвых = К Хвх . (1.22)
Переходная функция звена имеет вид при Т < 2То:
Хвых
= К[1– ![]() (
(![]() sin ωt + cos ωt)]Хвх. (1.23)
sin ωt + cos ωt)]Хвх. (1.23)
Здесь α и ω - соответственно вещественная и мнимая составляющие корней характеристического уравнения, определяемые из соотношений (смотри рисунок 1.13):
![]() ,
, ![]() . (1.24)
. (1.24)
К – коэффициент усиления (при ![]() К= Хвых ),
К= Хвых ),
Т и ![]() – постоянные времени,
которые находят по следующим формулам:
– постоянные времени,
которые находят по следующим формулам:
![]() ,
, ![]() .
(1.25)
.
(1.25)
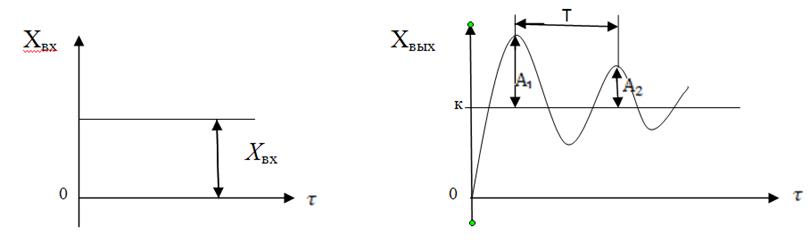 Переходная характеристика колебательного звена
приведена на рисунке
1.13:
Переходная характеристика колебательного звена
приведена на рисунке
1.13:
Рисунок 1.13
Оценка колебательности переходной функции колебательного звена производится по величине степени затухания:
![]() .
(1.26)
.
(1.26)
Передаточная функция колебательного звена:
W(P) = ![]() . (1.27)
. (1.27)
На рисунке 1.14 приведены условные обозначения колебательного звена в структурных схемах. На рисунке 1.15 представлена схема набора колебательного звена.
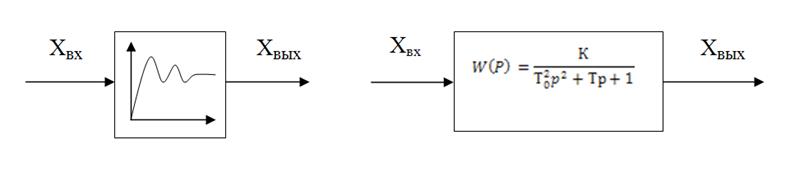
Рисунок 1.14
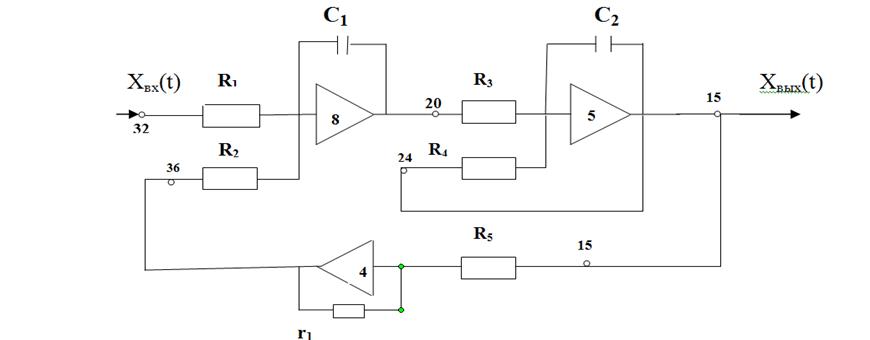
Рисунок 1.15
Установка коэффициента усиления К осуществляется сопротивлением R5. Постоянная времени Т определяется сопротивлениями R1 и R2 , причем величина их определятся коэффициентом
![]() . (1.28)
. (1.28)
Исходные данные для нахождения переходных характеристик даны в таблице Т-5 приложения А.
1.5 Схема набора на аналоговой машине исследуемых регуляторов, их статические и динамические характеристики
1.5.1 Пропорциональный регулятор.
Структурная схема идеального П-регулятора и схема его набора аналогичны схемам пропорционального звена.
Дифференциальное уравнение П-регулятора:
Хвых = КрХвх. (1.29)
Передаточная функция П-регулятора:
![]() .
(1.30)
.
(1.30)
Здесь Кр -коэффициент динамики этого регулятора, который необходимо осуществить на основании имеющихся результатов опыта.
1.5.2 Интегральный регулятор.
Структурная схема идеального И-регулятора и схема его набора
аналогичны схемам интегрального звена (см. рисунок 1.6).
Дифференциальное уравнение И-регулятора:
 КрХвх. (1.31)
КрХвх. (1.31)
Передаточная функция И-регулятора:
![]() . (1.32)
. (1.32)
где Кр= ![]() – коэффициента
усиления регулятора.
– коэффициента
усиления регулятора.
Исследование динамики этого регулятора осуществляется на основании результатов опыта.
1.5.3 Пропорционально-интегральный регулятор.
Дифференциальное уравнение ПИ-регулятора:
Кр  . (1.33)
. (1.33)
Передаточная функция ПИ-регулятора:
![]() .
(1.34)
.
(1.34)
Переходная функция имеет вид:
![]() (1.35)
(1.35)
где Кр – коэффициента усиления регулятора;
![]() – время
изодрома (интегрирования).
– время
изодрома (интегрирования).
Переходная характеристика ПИ-регулятора приведена на рисунке 1.16.

Рисунок 1.16
Установка коэффициента Кр осуществляется сопротивлением R1. Постоянная времени Т определяется сопротивлением R3 из условия:
![]() . (1.36)
. (1.36)
|
|
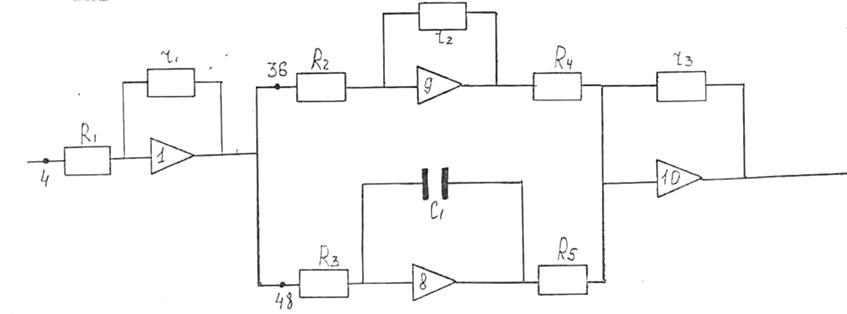
Рисунок 1.17
R1= R4= R5=r1= r2= r3=1 МОм; С1=1 мкФ.
Исходные данные устанавливаемых параметров представлены в таблице
Т-6 приложения А.
Схема набора ПИ-регулятора на коммутационной модели приведена на рисунке 1.17.
1.6 Порядок обработки результатов
1.6.1 При различных значениях параметров звеньев (или параметров настройки регулятора) находятся переходные характеристики при подаче на вход звена ступенчатого сигнала. Значения устанавливаемых параметров звеньев выбирается в соответствии с таблицей задания на работу.
1.6.2 По экспериментально полученным переходным характеристикам определяются параметры, характеризующие динамические свойства каждого звена (коэффициенты его дифференциального уравнения). Методика определения этих параметров для каждого описания в предыдущем разделе.
1.6.3 Записывается дифференциальное уравнение звена в численном виде (с учетом найденных параметров) и решается с целью проверки соответствия решения дифференциального уравнения и кривой разгона, полученной экспериментально.
1.6.4 Аналогично для идеальных П, И, ПИ - регуляторов по экспериментальным кривым разгона находятся их параметры настройки, т.е. коэффициенты дифференциальных уравнений, описывающие линейные законы регулирования, позволяющие решить дифференциальное уравнение.
1.6.5 Провести анализ влияния параметров звеньев и идеальных регуляторов на вид их переходных характеристик.
1.6.6 Оценить влияние величины входного сигнала на динамические характеристики рассматриваемых звеньев.
2 Лабораторная работа № 2. Исследование динамики замкнутых систем автоматического регулирования
2.1 Назначение работы
2.1.1 Исследование динамики соединений типовых звеньев, моделирующих тепловые объекты регулирования.
2.1.2 Исследование динамики одноконтурных САР с простейшими законами регулирования.
2.1.3 Исследование влияния параметров настройки регулятора на переходные процессы в системе.
2.2 Теоретическое введение
Объект автоматизации вместе с автоматическим регулятором представляет собой систему автоматического регулирования. На рисунке 2.1 представлена принципиальная схема простейшей системы автоматического регулирования, предназначенной для поддержания на заданном значении регулируемой величины, определяющей режим работы объекта регулирования.
Величина регулируемого параметра измеряется с помощью чувствительного элемента (ЧЭ) и сравнивается в регуляторе с заданным значением, которое вырабатывается задающим устройством (ЗУ) и вводится в систему в виде управляющего воздействия.
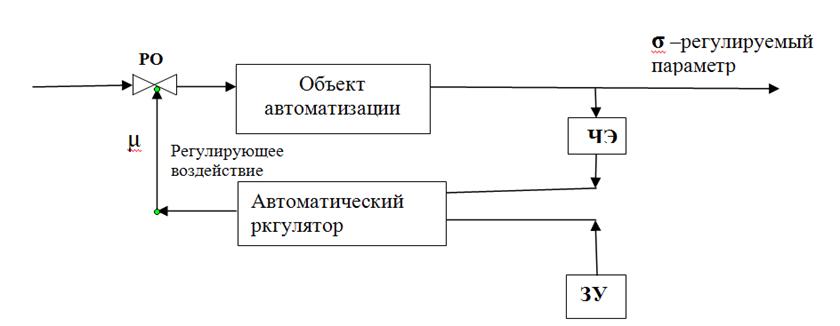
Рисунок 2.1
При отклонении регулируемой величины от заданного значения на входе регулятора появляется сигнал рассогласования. На выходе регулятора в этом случае вырабатывается сигнал, определяющий регулирующее воздействие на объект через регулирующий орган (РО) и направленный на уменьшение рассогласования. Регулятор воздействует на объект до тех пор, пока регулируемая величина не сравняется с заданным значением, которое может быть постоянным или меняться в зависимости от нагрузки.
Отклонение регулируемой величины от заданного значения может быть вызвано изменением управляющего воздействия или нарушениями работы объекта, связанными с различными возмущающими воздействиями.
При отклонении от равновесного состояния в системе автоматического регулирования возникают переходные процессы.
Изучение переходных процессов - одна из главных задач исследования динамики регулирования. Переходный процесс в системе должен быть устойчивым и обладать требуемым показателями качества. Характер переходного процесса зависит от динамических свойств системы, ее начального состояния, вида воздействия на систему, может быть определен аналитически, путем нахождения общего интеграла исследуемых дифференциальных уравнений, описывающих данную систему.
В качестве возмущения удобно пользоваться ступенчатой функцией.
Это возмущение обычно служит достаточно хорошей проверкой поведения системы регулирования в неблагоприятных условиях эксплуатации энергетических установок.
Основным недостатком аналитического метода определения переходного процесса являются большие вычислительные трудности, которые возрастают с увеличением порядка исходного дифференциального уравнения.
Наряду с аналитическими методами широко применяются расчетно-экспериментальные методы, основанные на применении аналоговых вычислительных машин.
Структурные схемы для решения уравнений движения отдельных элементов (приведены в лабораторной работе № 1) позволяют построить структурную схему моделирования всей системы автоматического регулирования. Такая схема отражает не только преобразования, происходящие со входными величинами в каждом из элементов системы регулирования, но также связи между элементами и внешними возмущениями, действующими на элементы.
С помощью аналоговых машин можно не только получить переходный процесс системы регулирования, описываемой заданной системой уравнений, но также выявить влияние коэффициентов на качество протекания исследуемого переходного процесса. Изменение коэффициента передачи по какому-либо входу аналогично изменению постоянной времени или коэффициентов усиления и самовыражения в исходных уравнениях.
Поскольку и постоянные времени, и коэффициенты выравнивания или усиления определяются характеристиками и конструктивными особенностями реальной системы, можно установить влияние того или иного конструктивного фактора на динамические свойства исследуемой системы. Это позволяет путем изменения конструкции того или иного элемента получить требуемые динамические характеристики.
2.3 Порядок выполнения работы
Лабораторная работа № 2 выполняется на аналоговой вычислительной машине МН-7 или МН-10.
Установка заданных параметров регулируемого объекта регулятора и последовательность действий при подаче на исследуемую систему возмущающего воздействия представлены в 1 разделе настоящего описания и здесь не рассматриваются.
При выполнении работы предполагается, что передаточная функция объекта W(P)об может аппроксимироваться передаточной функцией в виде (2.1), которую можно представить произведением трех последовательно включаемых апериодических звеньев, набираемых на АЭВМ:
 .
( 2.1)
.
( 2.1)
В качестве регулятора на АЭВМ набираются идеальные П, И, ПИ, - регуляторы с передаточными функциями, следующего вида:
П – регулятор : ![]() ;
;
И – регулятор: ![]() ;
;
ПИ – регулятор: ![]() .
.
 На рисунке 2.2 представлена схема моделировния регуляторов разного
типа, которые могут собраны на АЭВМ. РО –регулирующий
орган, обьект регулирования представлен в виде трех последовательно
включенных апериодических звеньев (на схеме обведены пунктирной линией) и
регулятор, подключенный параллельно обьекту регулирования.
На рисунке 2.2 представлена схема моделировния регуляторов разного
типа, которые могут собраны на АЭВМ. РО –регулирующий
орган, обьект регулирования представлен в виде трех последовательно
включенных апериодических звеньев (на схеме обведены пунктирной линией) и
регулятор, подключенный параллельно обьекту регулирования.
Рисунок 2.2
2.4 Схемы набора САР и определение переходных процессов в системе
2.4.1 Исследование динамических свойств регулируемого объекта.
В разделе 2.3 отмечалось, что динамические свойства исследуемого объекта аналогичны динамическим свойствам системы, состоящей из трех последовательно включенных апериодических звеньев. В этом случае схема объекта регулирования на коммутационном поле имеет вид:
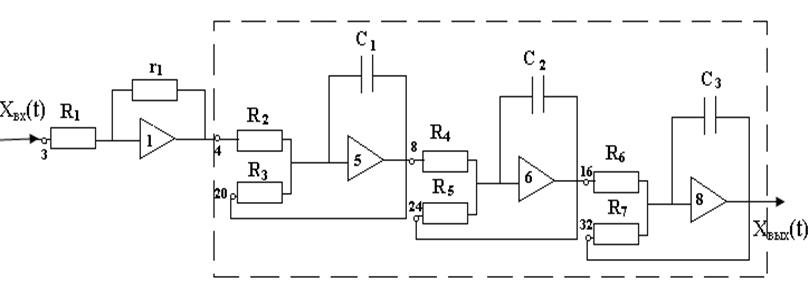
Рисунок 2.3
На рисунке 2.3 обьект регулирования обведен пунктирной линией. R1=r1=1 MОм; С1=С2=С3=1мкФ;
![]() ; В частном
случае, когда
; В частном
случае, когда
К2= К3= К4= 1 и Т2= Т3= Т4= Т, то ![]() =
=![]() =…=
=…=![]() =
= ![]() .
.
Подав на вход регулируемого объекта (гнездо 3) единичное ступенчатое возмущение, регулируем величину выходного сигнала как после каждого звена, так и на выходе из цепочки (Хвых).
Исходные данные для проведения опыта представлены в таблице 1 приложения Б.
2.4.2 Исследование переходных процессов в одноконтурной САР с П-регулягором.
Схема набора системы регулирования на коммутационном поле приведена на рисунке 2.4.
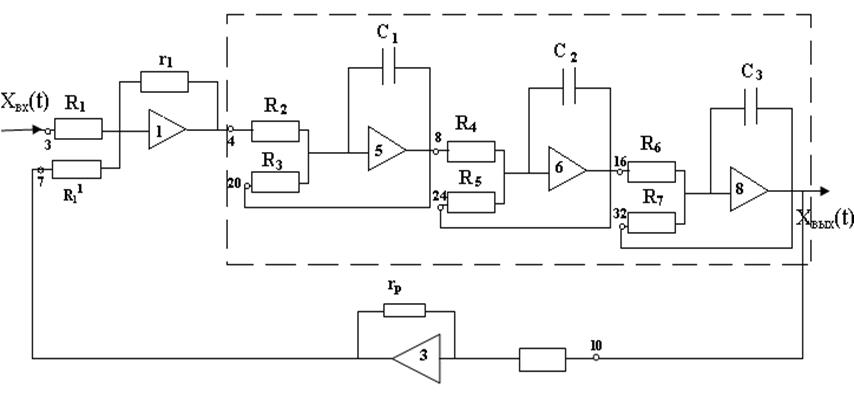
Рисунок 2.4
R1 = R11 = r = 1 МОм.
Передаточная
функция объекта регулирования и его параметры остаются такими же, что и в
первом опыте. Коэффициент усиления
регулятора изменяется сопротивлением
Rp, ![]() .
.
Подав на вход (клемма 3) рассматриваемой системы единичный ступенчатый сигнал Хвх (τ) =Uвх, на выходе ее (Хвых (τ) =Uвых) через каждые 5 секунд по вольтметру записывают переходный процесс в течение 5-10 минут.
При этом в зависимости от величины установленного коэффициента усиления регулятора переходный процесс в системе будет апериодический (а), колебательный с заданной степенью затухания (б), колебательный с незатухающими колебаниями (в).
Исходные данные представлены в таблице 2 приложения Б.

Рисунок 2.5
2.4.3 Исследование переходных процессов в одноконтурной САР с
И-регулягором.
Схема набора системы регулирования на коммутационном поле приведена на рисунке 2.6.

Рисунок 2.6
R1=R11=1 Мом
Коэффициент усиления регулятора устанавливается сопротивлением Rp. Подав на вход Хвх (τ) исследуемой системы ступенчатый сигнал, на выходе регистрируем по вольтметру выходную величину Хвых (τ) через каждые 5 секунд в течение 5-10 минут.
Переходные процессы,
возникающие в системе (см. рисунок 2.7), зависят от установленных параметров
настройки регулятора (Кр/Ти),
причем процесс может быть апериодическим (а),
колебательным с заданной степенью затухания ![]() (б), колебательный с незатухающими
колебаниями (в).
(б), колебательный с незатухающими
колебаниями (в).
 Исходные данные представлены в таблице 3 приложения Б.
Исходные данные представлены в таблице 3 приложения Б.
Рисунок 2.7
2.4.4 Исследование переходных процессов в одноконтурной САР с
ПИ – регулятором.
Схема набора системы регулирования на коммутационном поле МН-7 приведена на рисунке 2.8.
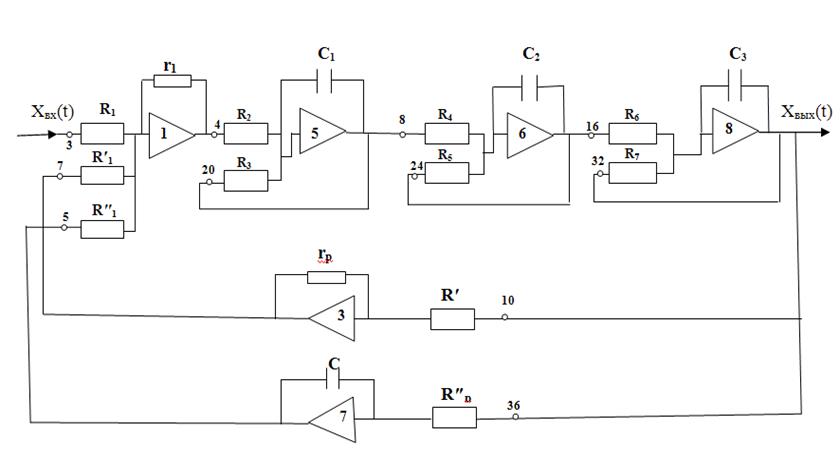
Рисунок 2.8
|
Подав на вход Хвх (τ) исследуемой системы ступенчатый сигнал, на выходе регистрируем по вольтметру выходную величину Хвых (τ) через каждые 5 секунд в течение 5-10 минут.
Переходные процессы, возникающие в системе, будут аналогичны процессам на рисунке 2.7, причем вид их зависит от величины установленных параметров настройки регулятора.
Исходные данные представлены в таблице 4 приложения Б.
2.5 Порядок обработки результатов
В заключение данной работы необходимо оценить влияние выбранного закона регулирования и установленных параметров настройки регулятора на переходные процессы в системе. Для этого в каждом из приведенных опытов находятся:
1) длительность переходного процесса τnn, т.е. время, в течение которого регулируемая величина не будет превышать 5% от первоначального отклонения;
2) величина
степени затухания переходного процесса ![]() , характеризующая
собой величину заданного запаса устойчивости;
, характеризующая
собой величину заданного запаса устойчивости;
3) величина максимального отклонения регулируемой величины при подаче на вход объекта единичного ступенчатого сигнала;
4) величина остаточной неравномерности регулирования δ в системе с П-регулятором.
Кроме того, по результатам проведения первого опыта необходимо определить параметры: Тоб, Коб, τ об.
2.6 Содержание отчета
В отчете должны быть представлены:
1) структурные схемы исследуемых в каждом опыте САР;
2) экспериментальные зависимости, полученные в результате проведения работы;
3) результаты экспериментальной обработки переходных процессов и анализ полученных результатов.
Приложение А
Таблица 1
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициент усиления,
|
Исследуемое звено |
Примечание |
|
|
МН-7 |
МН-10 |
||||
|
А |
20 |
10 |
0,5 1,0 0,1 |
Пропорциональное звено |
|
|
В |
15 |
25 |
0,5 1,0 0,1 |
|
|
Таблица 2
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициент усиления,
|
Исследуемое звено |
Примечание |
|
|
МН-7 |
МН-10 |
||||
|
А |
20 |
10 |
1,0 0,5 0,1 |
Интегрирующее звено |
|
|
В |
15 |
25 |
0,5 1,0 0,1 |
|
|
Таблица 3
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициент усиления |
Исследуемое звено |
Примечание |
|||
|
МН-7 |
МН-10 |
|
|
|
|||
|
А |
50 |
10 |
0,05 0,1 |
0,05 0,1 |
1,0 1,0 |
Апериодическое эвено |
|
|
В |
100 |
25 |
0,1 0,05 |
0,1 0,05 |
1,0 1,0 |
|
|
Таблица 4
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициент усиления |
Исследуемое звено |
Примечание |
|||
|
МН-7 |
МН-10 |
|
|
|
|||
|
А
Б |
100
50
|
25
10 |
0,5
1,0 |
0,1
0,05 |
0,1
0,05 |
Реальное дифференцирующее звено |
|
|
В |
50 |
10 |
1,0 |
0,02 |
0,02 |
|
|
Таблица 5
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициент усиления |
Исследуемое звено |
Примечание |
||||
|
МН-7 |
МН-10 |
КR1=КR2 |
|
|
|
|||
|
А
|
50
|
10
|
0,2
|
0,1
|
0,1
|
1,0 |
Колебательное звено |
|
|
В |
50 |
10 |
0,5 |
0,2 |
0,1 |
1,0 |
|
|
Таблица 6
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициент усиления |
Исследуемый элемент |
Примечание |
||
|
МН-7 |
МН-10 |
КR1
|
КR2 |
|||
|
А |
10 |
2 |
1,0 |
0,2 |
ПИ-регулятор |
|
|
В |
20 |
2 |
2,0 |
0,1 |
|
|
Приложение Б
Таблица 1
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициенты усиления,
|
Исследуемый элемент |
Примечание |
|
|
МН-7 |
МН-10 |
||||
|
А |
100 |
25 |
0,1 |
Объект регулирова ния |
|
|
В |
100 |
25 |
0,2 |
|
|
Таблица 2
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициент усиления,
|
Исследуемый элемент |
Примечание |
|
|
МН-7 |
МН-10 |
||||
|
А |
30 |
10 |
3,2 |
САР с П-регулятором |
|
|
В |
30 |
10 |
1,5 |
|
|
|
С |
30 |
10 |
0,4 |
|
|
Таблица 3
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициент усиления,
|
Исследуемый элемент |
Примечание |
|
|
МН-7 |
МН-10 |
||||
|
А |
30 |
10 |
0,35 |
САР с И-регулятором |
|
|
В |
30 |
10 |
0,2 |
|
|
|
С |
30 |
10 |
0,1 |
|
|
Таблица 4
|
Вариант |
Величина входного сигнала, Uвх, В |
Коффициенты усиления, |
Исследуемый элемент |
Примечание |
||
|
МН-7 |
МН-10 |
|
|
|||
|
А |
30 |
10 |
2,0 |
0,07 |
САР с ПИ-регулятором |
|
|
В |
30 |
10 |
1,5 |
0,2 |
|
|
|
С |
30 |
10 |
0,7 |
0,02 |
|
|
Список литературы
1. Ротач В.Я. Теория автоматического управления.-М.: МЭИ,2004.- 400 с.
2. Теория автоматического управления/ Под.ред. Ю.М.Соломенцова. -М.: Высшая школа,1999. -268 с.
3. Плетнев Г.П. Автоматизация технологических процессов и производств в теплоэнергетике. -М.: МЭИ, 2005. -352 с.
4. Плетнев Г.П. Автоматизированное управление объектами тепловых электростанций: Учебное пособие для вузов. -М.: Энергоиздат, 1981. - 368 с.
5.
Воронов А.А., Титов В.К., Новогранов
Б.Н. Основы теории
автоматического регулирования и управления. -М.:
Высшая школа, 1977.
6. Дорф Р., Бишоп Р. Современные системы управления. - М.: Лаборатория базовых знаний, 2002. -832 с.
7. Стефани Е.П. Основа расчета настройки регуляторов теплоэнергетических процессов. - М.: Энергия, 1972. -376 с.
8. Стефани Е.П., Панько М.А., Пикина Г.А. Сборник задач по основам автоматического регулирования теплоэнергетических процессов. - М.: Энергия, 1973. -336 с.
9. Саранцев К.Б. Регулирование и автоматизация турбин. - Л.: Машиностроение, 1973. -248 с.
10. Стояк В.В. Теория автоматического управления: Программа, методические указания и контрольные задания для студентов теплоэнергетических специальностей заочной формы обучения.- Алматы: АИЭС, 2004. -17 с.
11. Бекалай Н.К., Джаманкулова Н.О. Теория автоматического управления. Методические указания к выполнению расчетно-графических работ и контрольные задания для студентов всех форм обучения специальности 5В071700 – Теплоэнергетика. - Алматы: АУЭС, 2010. -15 с.
12. Лабораторный практикум по курсу «Теория автоматического управления». АИЭС, 2006.
Содержание
1 Лабораторная работа № 1 3
2 Лабораторная работа № 2 17
Приложения 26
Список литературы 29
Сводный план 2013г., поз. _65_
Нурипа
Киргизбаевна Бекалай
Нелля
Орналиевна Джаманкулова
Теория
автоматического управления
и системы автоматического
управления теплотехнологическими процессами теплоэнергетики
Методические указания к
выполнению лабораторных работ
для студентов
специальности 5В071700 - Теплоэнергетика
Редактор Л.Т.
Сластихина
Специалист по
стандартизации Н.К. Молдабекова
Подписано в печать
_________
Формат 60х84 1/16
Тираж __50___ экз.
Бумага
типографская N 1
Объем _1,9___
уч.-изд.л.
Заказ
_____. Цена __190__ тг.
Копировально-множительное
бюро
Некоммерческого
акционерного общества
"Алматинский
университет энергетики и связи"
050013, Алматы,
Байтурсынова 126